Sept. 19 2025
9月19日
技術・芸術展示コアタイム 12:40-14:20 (終日展示可能)
- 3G-01
-
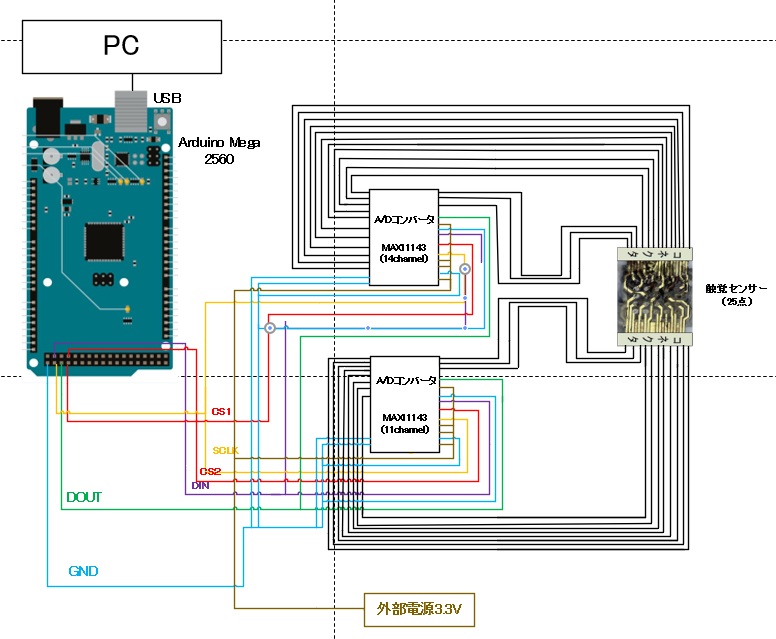
多点触覚デバイスによる触覚インタラクション1ー高速A/D変換部の実装
〇舒 澤晖(東京工芸大学)、曾根 順治(東京工芸大学) - 本研究では、薄膜樹脂型の触覚センサーで得られる触覚の電圧を、高速でA/D変換する機能を開発し、<#%BR%#>そのデータから触覚を生成する機能の開発を進めている。その開発を説明する。
- 3G-02
-
香りから想起される多様なエピソード記憶の共有システム
〇津江 勇作(東京都立大学)、阪口 紗季(東京都立大学)、柴﨑 美奈(東京都立大学)、串山 久美子(東京都立大学)、馬場 哲晃(東京都立大学) - 香りはエピソード記憶と強く結びついており,記憶想起を促すことが知られている一方で,他の感覚に比べて言語化が難しい.本研究では,予備的調査として,香りから想起される記憶を収集するワークショップを実施した.その結果,想起される記憶には個人差があるが,他者の記憶に対する共感や差異に対する相互理解も生じた.これらの知見を踏まえ,香りに関連するエピソード記憶の収集と共有を可能にするシステムを試作した.

- 3G-03
-
下方視野拡大HMDを用いた上下半身の分裂ドリフト錯覚
〇近藤 亮太(東京大学)、中野 萌士(東京大学) - アバタを左右に分裂することで,自己身体の分裂感が生じるものの,その感覚は弱い。本研究では,アバタを上下半身に分割し,上半身または下半身を体験者の視点と同時に水平移動させることで,強い身体分裂と身体ドリフト感覚を提供する。加えて,下方視野拡大HMDを用いることで,下半身の鮮明な提示及び移動感覚の強化を行う。
- 3G-04
-
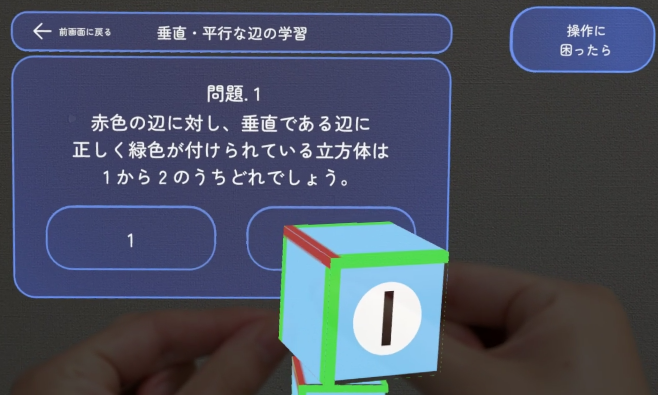
複合現実を用いた空間図形学習教材の開発:演習形式の導入と学習効果の検証
〇室伏 美佑(秋田県立大学大学院)、寺田 裕樹(秋田県立大学)、猿田 和樹(秋田県立大学)、陳 国躍(秋田県立大学) - 物の大きさや位置を把握する空間認知能力を向上させるには、模型を用いた主体的な図形学習が有効とされる。そこで本研究では、空間図形の学習を題材に、授業支援を目的とした模型教材を複合現実(MR)で開発している。その一環として、従来の一方向的に内容を提示する教材構成を、演習問題に取り組ませる形式へと再構成し、大学生を対象に有効性および操作性の評価を進め、授業支援としての可能性を検討した。
- 3G-05
-
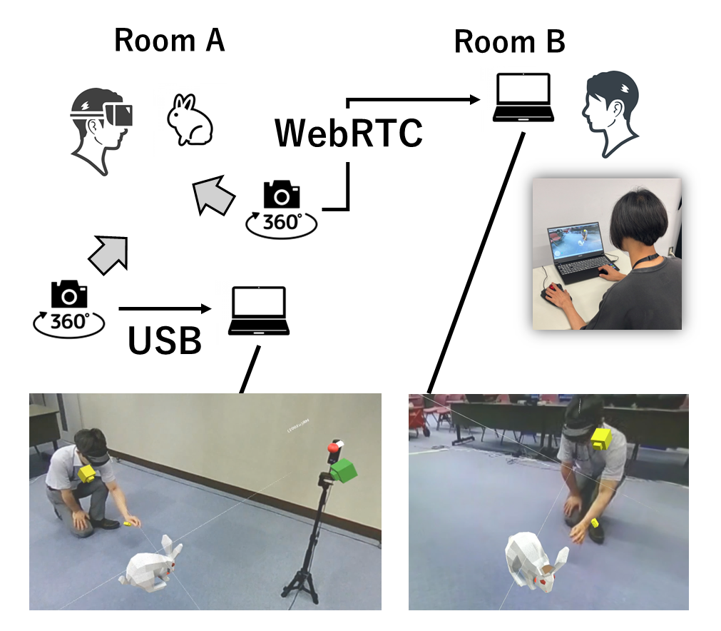
WebRTC活用型リアルタイム拡張仮想と複合現実の融合システム開発
元村 慎太郎(国立研究開発法人 情報通信研究機構)、〇井原 章之(国立研究開発法人 情報通信研究機構) - 我々は近年、全天球カメラ映像と仮想物体の映像を合成するリアルタイム拡張仮想のシステムを開発し、複合現実と組み合わせて活用してきた。今回は新たに「遠隔地へのカメラ映像の送信」を実現するために、全天球カメラ映像をWebRTCで配信する機能を実装した。これにより、ユーザーが複合現実を扱う状況において、遠隔地のユーザーがPCを使ってその世界にアクセスする技術を低遅延化することが可能となった。
- 3G-06
-
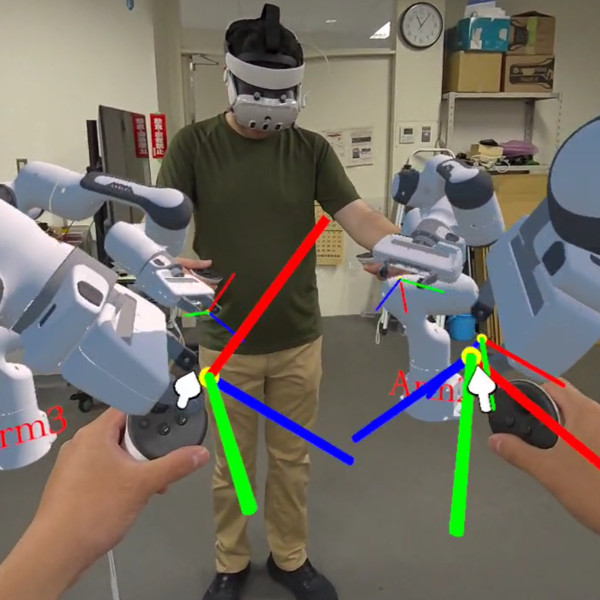
複合現実とデジタルツインを活用した多腕ロボット遠隔操作
〇Heredia Perez Saul Alexis(東京大学大学院医学系研究科)、Hung-Chin Lin(東京大学大学院工学系研究科)、原田 香奈子(東京大学大学院医学系研究科、東京大学大学院工学系研究科) - A user interface for the teleoperation of a multi-arm robotic system is proposed. This leverages mixed reality devices and digital twin simulation for interactive robot manipulation in laboratory tasks. Preliminary testing suggested intuitive operation compared to conventional user interfaces.
- 3G-07
-
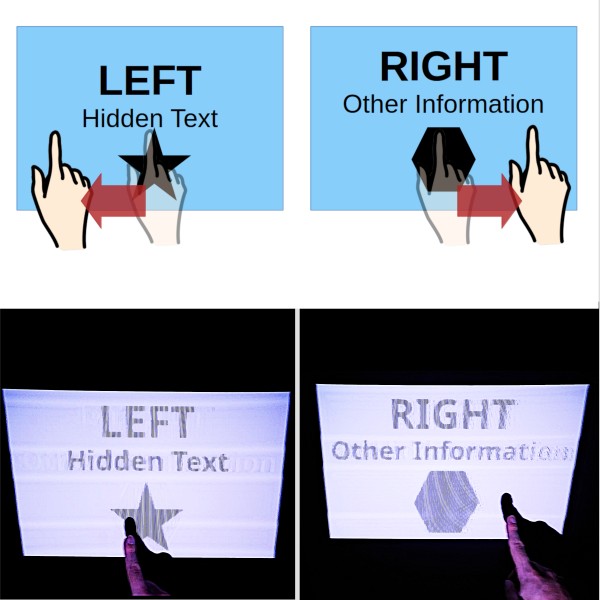
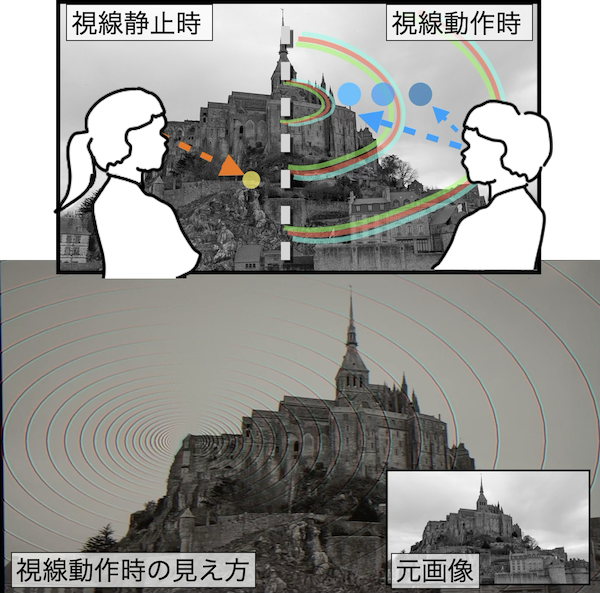
高速投影による視線移動方向に応じた複数映像表示手法
〇宮崎 竜輔(東京科学大学)、宮藤 詩緒(東京科学大学)、小池 英樹(東京科学大学) - 本研究では,縞模様に分解した画像を高速プロジェクタで表示することで ,閲覧者の視線の移動方向に応じて異なる画像を提示する手法を提案する.投影される映像は,静止時は単一色画像のように知覚されるが,特定方向への視線移動を行う間のみ目的画像が知覚される.また,複数の異なる視線移動方向に対して異なる画像の提示が可能である.本論文ではこの手法の原理を述べインタラクションへの応用例を提案する.
- 3G-08
-
両端斜切円柱集積構造による空中像光学素子の製作と評価
〇佐野 遵平(電気通信大学)、小泉 直也(電気通信大学) - 本研究では,迷光の発生を抑えた空中像の実現を目的として,円柱両端を斜めに切断した形状の光学素子を二次元平面上に並べた構造の再帰透過光学素子を製作し,その機能を確認した.従来の直交ミラー構造を有する再帰透過光学素子では迷光の発生が課題であり,その解決策として円柱形状を利用した構造が提案されている.そこで本研究では,実際に製作された円柱構造の光学素子により,文字の空中結像が可能であることを確認した.
- 3G-09
-
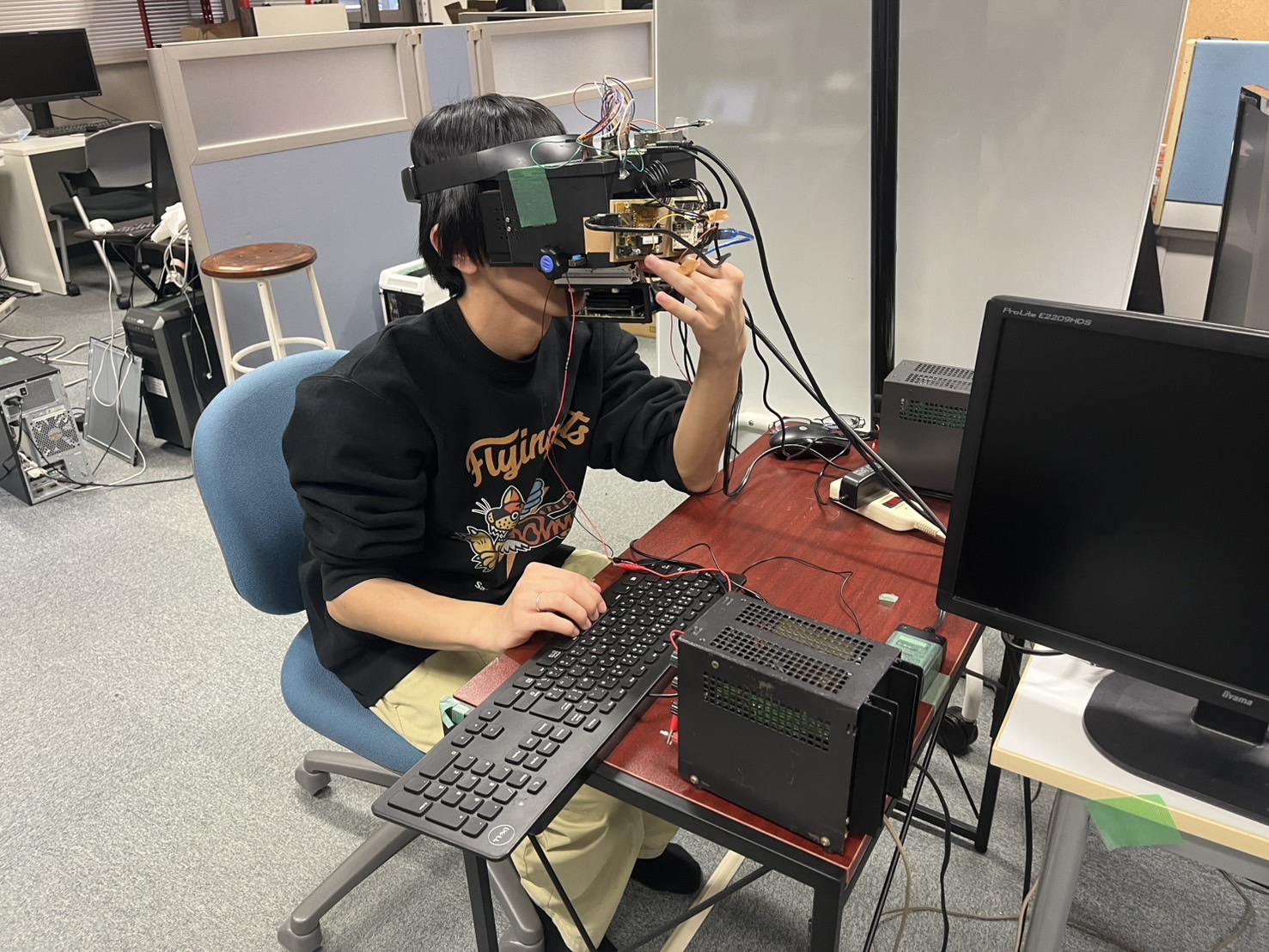
頭部搭載可能な小型マクスウェル視ディスプレイとその性能
〇神谷 陸杜(岐阜大学)、木島 竜吾(岐阜大学)、金 光宇(岐阜大学) - 本研究では、輻輳調節矛盾の軽減を目的に、小型で頭部装着可能なマクスウェル視ディスプレイを製作した。アイトラッキングによりピンホール光源位置を制御してアイボックスを動的に拡大することで見え方を安定させた。被験者実験により視差式3Dディスプレイよりも近距離での融像性が向上することを示した。
- 3G-10
-
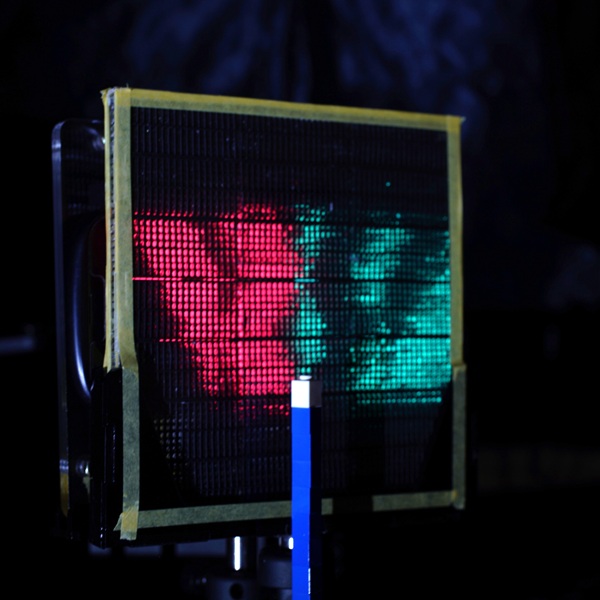
高速ディスプレイによる継時加法混色を用いた視線移動依存型視線誘導手法の提案
〇奈良 雅大(東京科学大学)、宮崎 竜輔(東京科学大学)、廣井 裕一(クラスター メタバース研究所)、平木 剛史(クラスター メタバース研究所、筑波大学)、伊藤 勇太(東京大学)、宮藤 詩緒(東京科学大学) - 視線誘導はユーザの注意を特定の領域に向ける上で不可欠だが,従来手法は持続的な視覚的ノイズで集中を妨げる.そこで視線移動時のみ現れる視線誘導を提案する.本手法は継時加法混色手法を応用し,視線誘導パターンを埋め込んだ画像を高速表示することで,注視中は不可視だが,視線移動時だけ知覚される視線誘導を実現する.本手法により,視線計測器等のセンサ装置不要でユーザの集中を妨げず効果的に視線誘導が可能となる.
- 3G-11
-
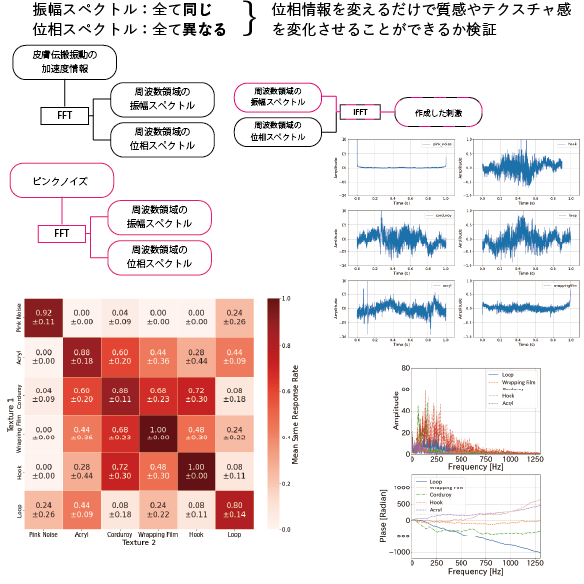
ノイズの位相変調とテクスチャ感との関係
〇久原 拓巳(名古屋工業大学大学院)、川合 章史(名古屋工業大学大学院)、井上 雄斗(名古屋工業大学大学院)、湯川 光(名古屋工業大学大学院)、田中 由浩(名古屋工業大学大学院、稲盛科学研究機構) - これまで振動触覚刺激でテクスチャを再現する際には多くの研究が振幅変化や振幅スペクトル,周波数に着目し,計測した振動を再現するように刺激を提示する手法が一般的であった.本研究では,テクスチャに影響を与えるパラメータとして計測された波形の位相を提案する.本研究では,ノイズの位相を変調することで与えられるテクスチャ感がどのように変化するのかの調査・評価を行った.
- 3G-12
-
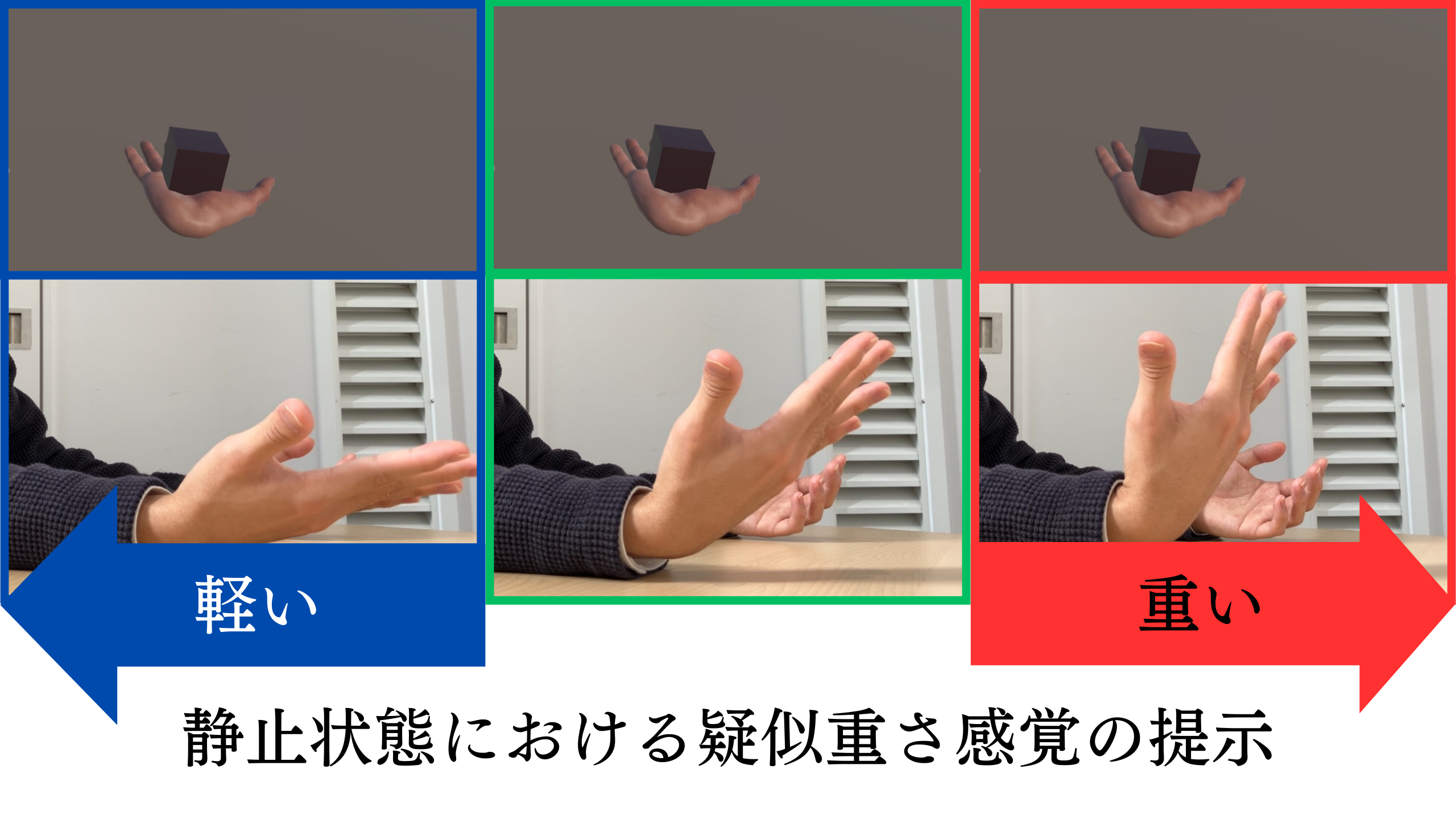
静止状態における疑似重さ感覚の提示
〇河本 舜平(東京科学大学)、サエティア スパット(東京科学大学)、小池 康晴(東京科学大学) - 本研究では、手のひらで物体を保持させた状態でも、VR空間内で重量感を提示する手法の可能性を検討した。従来のC/D比に基づく手法では、物体が静止している場合、C/D比がゼロとなるため、質量感を提示できないという制約があった。これを解決するため、本研究では手首が回転バネとして機能するモデルを構築した。その結果、基準質量500gに対し、±132gの範囲で重量差を識別できることが示された。
- 3G-13
-
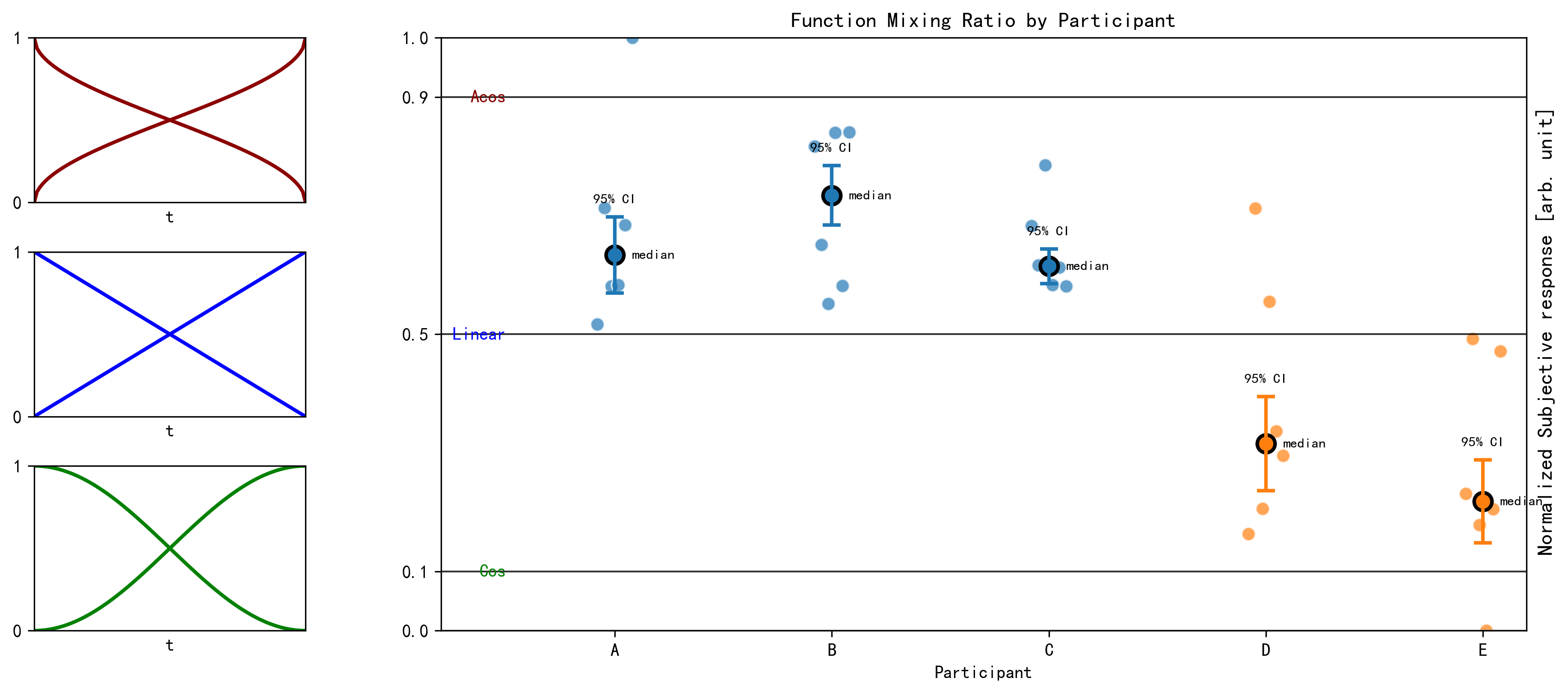
2視点輝度混合手法における主観的速度等価性測定と再現性の向上
〇KUANG LONGHUI(大阪大学)、古川 正紘(大阪大学、脳情報通信融合研究センター)、前田 太郎(大阪大学、脳情報通信融合研究センター) - 遠隔操縦において映像伝送遅延は運動視の成立を妨げるため、多視点映像を即時混合し等価的無遅延化させる手法が提案されている。しかし既存の時間的線形な関数に従う混合手法は、再現される速度の主観的等価性が未評価であった。そこで本稿では2視点輝度混合手法における主観的速度再現性を調整法により測定した結果、再現性低下が生じる場合があること示されたため、速度再現性を向上させる混合関数を再設計し効果を実証した。
- 3G-14
-
安全音圧下での爆発音のラウドネス向上に向けた異常聴覚の仮想提示手法の検討
〇藤田 光(東京大学)、細井 十楽(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - VRや映像コンテンツで爆発音を提示する際,音圧を安全域に抑えながら迫力を保つことは難しい.本研究では,爆発直後の一時的な聴覚特性の変化(難聴感・耳鳴り)を再現するエフェクトを左右差付きで付加し,聴覚上の「残効」を模擬してラウドネスと臨場感を高める手法を検討する.実験から,この異常聴覚の提示は若年層で爆発音の臨場感を高めることを確認したが,ラウドネス向上や全年齢への適用は今後の課題だと分かった.

- 3G-15
-
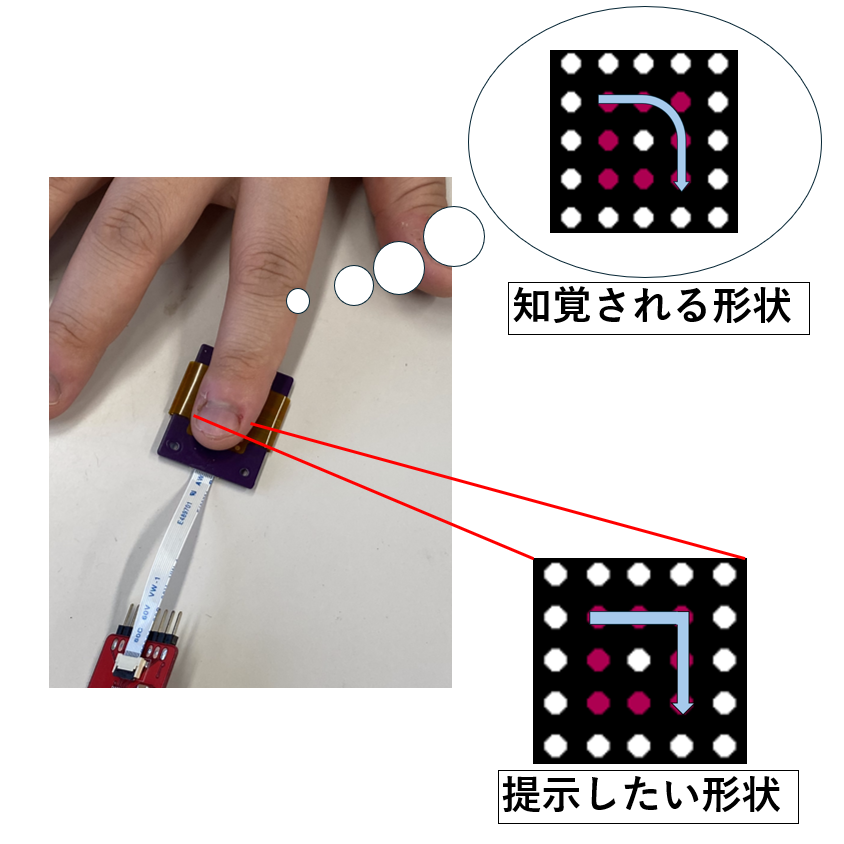
触覚電気刺激を用いた形状提示における角部再現性の向上
〇山田 葵(筑波大学理工情報生命学術院)、梶本 裕之(電気通信大学)、矢野 博明(筑波大学)、YEM VIBOL(筑波大学) - 触覚電気刺激とは皮膚に電流パルスを流すことで疑似触覚を与える触覚提示手法である。正方形などの角を有する形状の輪郭点を指先に1 点ずつ時計回りに提示する際, 角部が欠落するように知覚される.より正確な触覚提示のため、角部におけるより長い時間の刺激提示と陽極・陰極刺激の切り替えの効果を被験者実験により検証した。その結果、角部以外に陽極刺激を与えつつ、角部に陰極刺激を長い時間与えることにより、角知覚損失が低減することを確認した。
- 3G-16
-
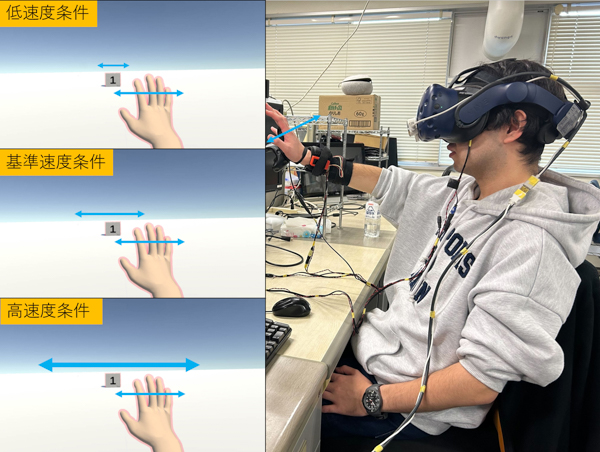
VRテレキネシス環境における操作対象の距離と速度がテレキネシス感に及ぼす影響
〇柴原 寛大(電気通信大学)、野嶋 琢也(電気通信大学)、櫻井 翔(電気通信大学)、広田 光一(電気通信大学) - VR空間でテレキネシス操作を行う感覚(テレキネシス感)に運動主体感が寄与する可能性が示されている.運動主体感の強度は自身の行為の結果の時空間的な変化により左右される.本研究では,ユーザのテレキネシス操作行為の時空間的な変化を物体の速度と距離に対応させ,この2つの要因が運動主体感とテレキネシス感に及ぼす影響を調査した.実験の結果,物体の速度が運動主体感およびテレキネシス感に作用することが示された.
- 3G-17
-
低呼吸状態における視聴覚情報の動的提示による瞑想状態への誘導
〇永田 簾(東京大学)、郭 凱(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - 現代において、心身の安定や集中力の向上を目的とした瞑想に注目が集まっている。一方で、初心者にとっては瞑想状態の感覚がつかみにくく、習得までに時間を要する点が課題となっている。本研究では、瞑想中に見られる低呼吸状態に着目し、徐々にその状態に移行する視聴覚情報をVR空間内で提示する手法を構築した。これにより、深い瞑想状態への導入を簡易化する方法を示し、瞑想初心者の実践支援につながる知見を得た。

- 3G-18
-
飴を用いた単一コーナーキューブ構造の再帰性反射材の作成と評価
〇久保 なつみ(群馬大学)、奥 寛雅(群馬大学) - 動物にモーションキャプチャを行う際、従来のマーカーは健康被害のリスクがあるため、その解決のために可食マーカーを提案し、安全な手法の実現を目指す。先行研究では飴製再帰性反射材を多面体構造にすることで全方向の再帰反射を実現したが、実用性に課題が残った。そこで本研究では別構造として、コーナーキューブ1素子の飴製再帰性反射材を試作し、再帰反射することを確認した。さらにマーカーとしての応用可能性も検討した。

- 3G-19
-
3Dハプティクスのための3次元振動モータXReactorの振動特性検証
〇小久保 颯哉(名古屋大学大学院)、部矢 明(名古屋大学大学院)、井上 剛志(名古屋大学大学院) - 近年,メタバース産業の活発化に伴い, XR技術に関する研究が盛んに行われている.このXR技術において,より現実環境を再現するには,力触覚の提示は必要不可欠である.力触覚提示方法の一つに,非対称な振動の提示により使用者に牽引錯覚を与える疑似牽引力提示方法がある.本研究では,空間的な多自由度疑似牽引力提示を行うために,3次元振動モータであるXReactorの振動特性の調査を行った.
- 3G-20
-
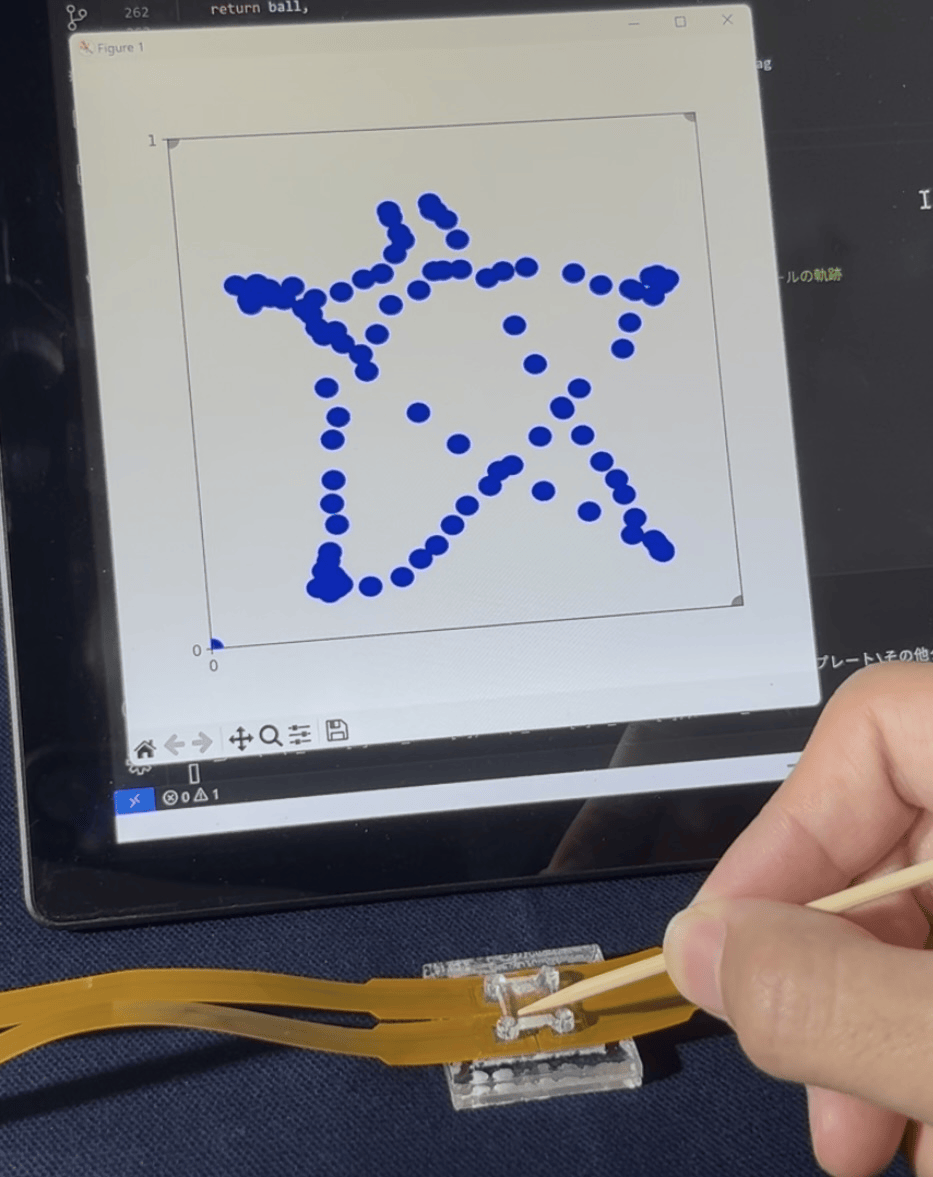
安定把持を実現するテレロボット用マイクロフォースプレートの開発
〇柚 空翔(立命館大学)、街道 一翔(立命館大学)、安藤 潤人(立命館大学)、野間 春生(立命館大学) - 人は物体を持つ際に、指先の接触面で感じる力覚から多くの情報を得ることで器用に持ち上げている。ロボットにも同様の感覚を与えることを目指し、ハンドの指先に取り付け可能で3軸の力が計測可能な機器として、4つの超小型MEMS触覚センサで構成した10mm×9mmのマイクロフォースプレートを開発した。これにより、接触面に加わる圧力や剪断力、回転モーメントを取得可能であり、テレロボットにおける安定把持への有効性を確認した。
- 3G-21
-
裸眼立体視ディスプレイを用いたバーチャルバックミラーシステムの提案
〇篠原 七海(明治大学)、三武 裕玄(明治大学) - 本研究ではソーシャルVR内における他者の存在感を自然に提示する手法として,裸眼立体視ディスプレイを用いたバーチャルバックミラーシステムを提案する.鏡という日常的なメタファーに着目し,ディスプレイにVR空間が反射して映り込んでいるかのように提示することで,現実空間にVR空間が重なって存在するような視覚体験を実現する.これにより,VR空間内の他者がユーザと同じ空間に存在しているような感覚をもたらすことを目的としている.予備的な印象調査を通じて,本手法がHMDに依存しないPC作業と両立可能なソーシャルプレゼンス提示手法として有効である可能性が示唆された.

- 3G-22
-
聴触覚共有型バイブロスケープによる存在感共有手法の基礎検討
〇沈 家宜(慶應義塾大学大学院メディアデザイン研究科)、彭 涵睿(慶應義塾大学大学院メディアデザイン研究科)、山村 風子(株式会社テレビ朝日)、香川 凌也(株式会社テレビ朝日)、横井 勝(株式会社テレビ朝日)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 近年、メタバースを介した遠隔コミュニケーションが注目されているが、映像やロボットなど、依然として視覚情報を用いたアバターの表現が主流である。本研究では、視覚情報を用いずに聴覚と触覚を用いた遠隔ユーザの存在感を伝達・共有する手法を提案する。ユーザの位置・頭部追跡システムと、空間音響と振動フィードバックを統合し、複数人に見えない存在感を共有させる聴触覚環境を実装し、公開展示においてフィードバックを得た。
- 3G-23
-
識別子連携分散フォーマットに基づく多感覚の経験共有プラットフォームの基礎検討
〇東 治臣(慶應義塾大学大学院メディアデザイン研究科)、朱 宇凡(慶應義塾大学大学院メディアデザイン研究科)、Brophy Jack(慶應義塾大学大学院メディアデザイン研究科)、Rasa Ismael(慶應義塾大学大学院メディアデザイン研究科)、森田 迅亮(慶應義塾大学大学院メディアデザイン研究科)、堀江 新(慶應義塾大学大学院メディアデザイン研究科)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 視聴触覚など多感覚の記録・保存・再生は重要であるが,スマートフォンによる動画撮影など従来のデジタル機器を用いた経験共有は視聴覚が中心であり,触覚を含む多感覚の記録・保存・再生を一体管理する仕組みの普及には至っていない.本研究では異なる機器が生成する映像・音響・触覚の記録データを識別子で束ねたフォーマットで分散保存し,識別子を用いてデータを参照することで同期再生できるプラットフォームの基礎検討を行った.実装例として小型筐体の経験共有ボックスを試作して,本プラットフォームを用いた多感覚の経験共有の可能性を示す.

- 3G-24
-
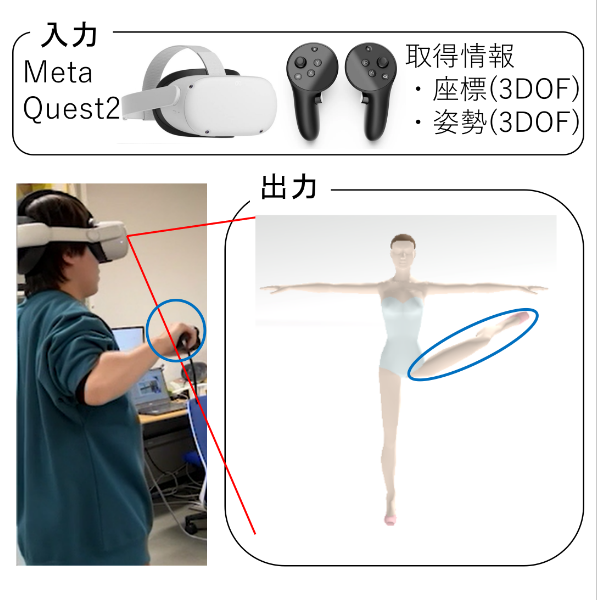
ハンドコントローラを用いた関節操作によるVRアバタの動作作成
〇開田 拓翔(龍谷大学大学院 先端理工学研究科)、曽我 麻佐子(龍谷大学大学院 先端理工学研究科) - 本研究では,手に持ったコントローラの移動・回転をVRアバタの各関節に割り当てて人体動作を作成する手法を提案する.手首とその他の関節の可動域の割合をマッピングするモードとコントローラの姿勢を各関節に一定時間の遅延を設けて順番に代入するモードを実装した.これにより,実演が難しい繊細な動作の作成に加え,モーションキャプチャなどでは扱いづらい鎖骨や背骨といった関節の直感的な操作も可能となる.
- 3G-25
-
フィンガーフリー型振動デバイスによる擬似牽引力提示とそのVR応用
〇伊藤 充(三菱電機株式会社) - 本研究は,親指・人差し指を使わず装着可能なグリップ型デバイスを用い,非対称振動による牽引錯覚を提示するVR向け擬似触覚システムを提案する.試作装置は,小指・薬指・手のひらで固定され,ハンドトラッキングやコントローラ操作と併用可能である.低コストな2つのアクチュエータによる垂直方向の牽引感が,VR環境で擬似的な重さの触覚を提示する.

- 3G-26
-
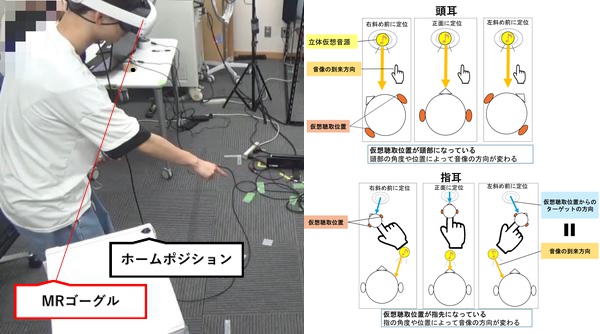
重度視覚障害者向け複合現実物体位置提示インタフェース〜探索方式がユーザビリティに与える影響〜
〇棟近 子竜(神奈川工科大学大学院)、村野 航大(神奈川工科大学)、金澤 悠冬(神奈川工科大学)、高尾 秀伸(神奈川工科大学、神奈川工科大学大学院) - 重度視覚障害者は視覚情報が利用困難なため,物体の位置を認知することが難しい.この問題に対し,筆者らは立体音響およびソニフィケーションを用いた複合現実物体位置提示インタフェースを開発中である.本報では,仮想聴取位置を示指先端に移動させた条件と仮想聴取位置を頭部とした条件におけるユーザビリティを比較することで,複合現実物体位置提示インタフェースの設計指針導出を行う.
- 3G-27
-
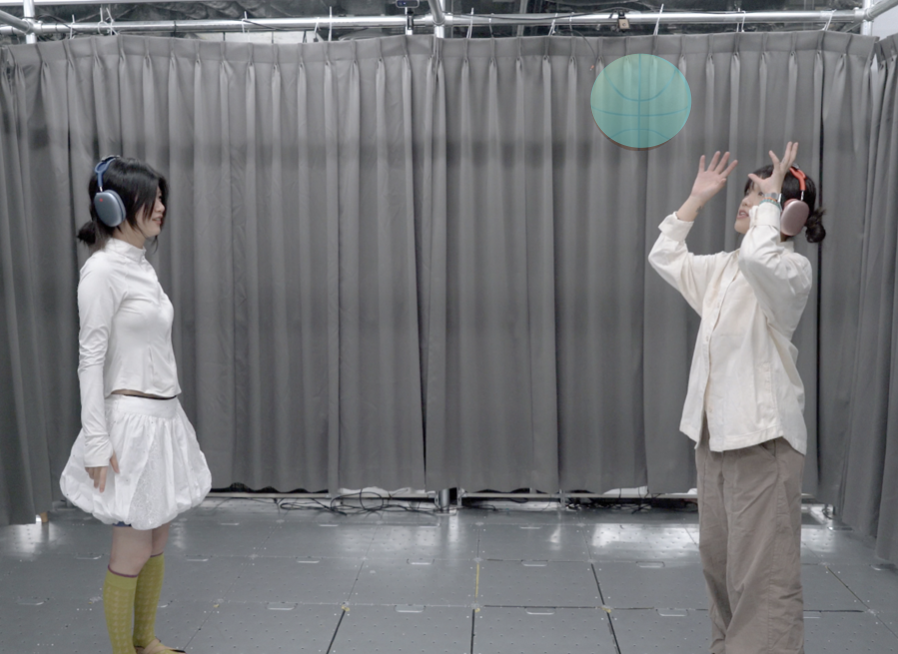
ボクシングにおけるアバターを用いた自己投射型トレーニングシステムの提案
〇中村 壮一(慶應義塾大学大学院メディアデザイン研究科)、Cheymol Antonin(慶應義塾大学大学院メディアデザイン研究科)、脇坂 崇平(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 本研究では、ボクシングに取り組む人が自己理解を深めながらトレーニングに取り組める自己学習型トレーニングシステムを提案する。従来の自己学習法では、二次元映像を見返す受動的な手法が主であり、三次元かつ能動的なトレーニングのアプローチは十分に検討されていない。本システムでは、複合現実空間にユーザーの動作を再現したアバターとトレーニングを行い、システムの有効性を検証する。

- 3G-28
-
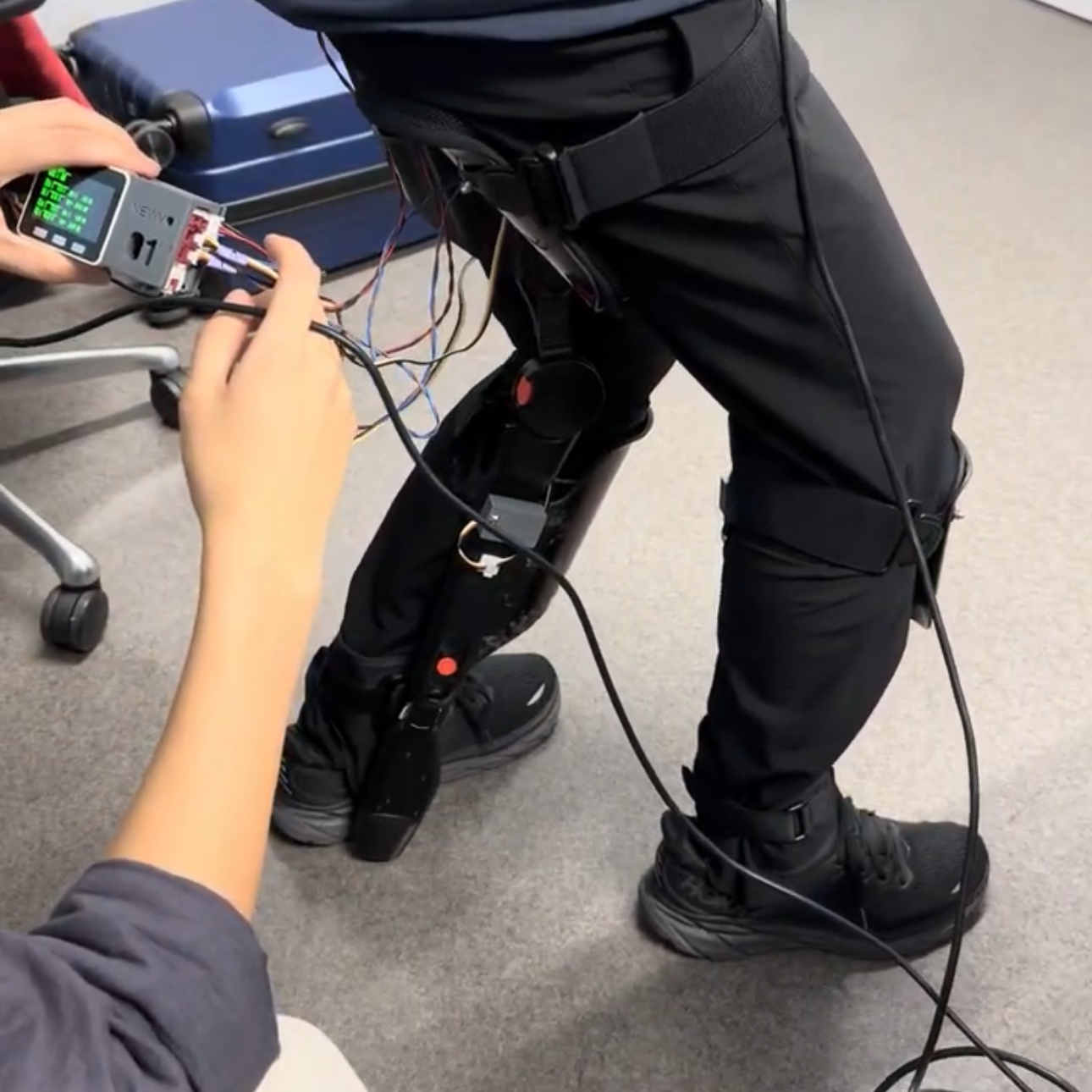
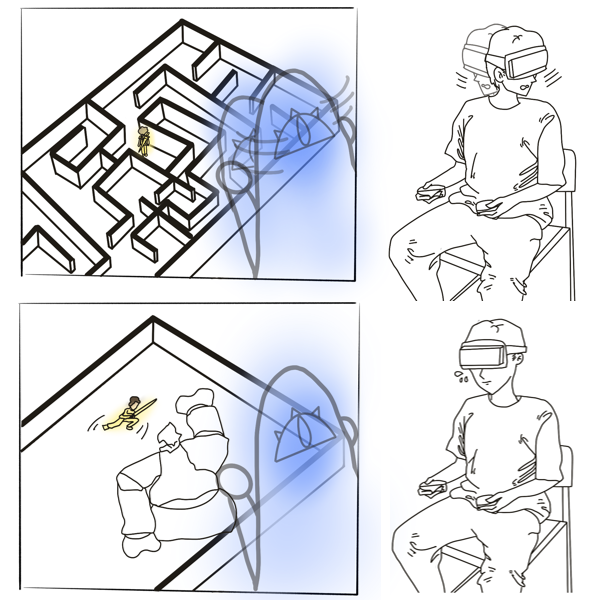
立位着座可能なアシストスーツを用いた疲労感の少ないVR歩行インタフェースの開発
〇吉田 翼(東京大学)、川島 嵩之(一般社団法人Ignite Your Ambition)、杉上 雄紀(東京大学)、雨宮 智浩(東京大学)、鳴海 拓志(東京大学) - 本研究では,実空間よりも広いバーチャル空間の移動を可能にするVR酔いの少ない手法として,立位のまま着座可能なアシストスーツと重心移動を組み合わせたVRロコモーションインタフェースを提案する.本発表では,重心移動により移動とジャンプが可能な立位着座型VR歩行インターフェイスの構成について述べ、性能評価に向けた実験計画を示す。
- 3G-29
-
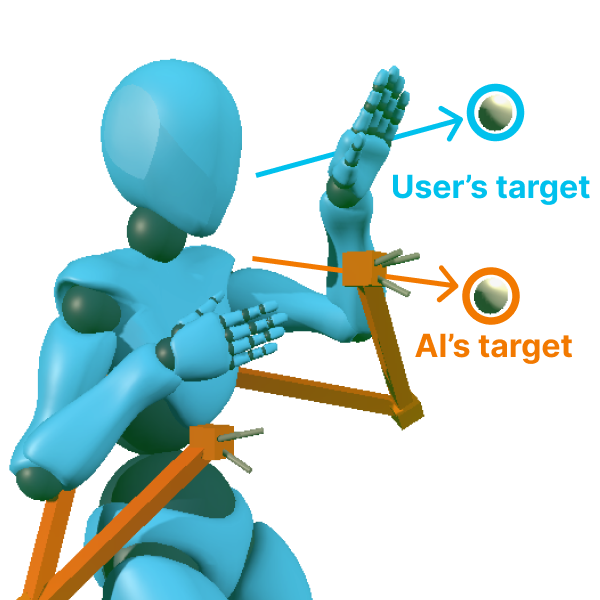
行為主体感保持のためのユーザ運動同期を用いた追加肢操作システム
〇山口 周(東京大学)、橋本 健(ソニーコンピュータサイエンス研究所)、峯 大典(東京大学)、谷川 智洋(東京大学)、鳴海 拓志(東京大学) - 生来の身体に無い肢体をユーザに付加する追加肢は身体の補助・拡張手法として期待されているが,行為主体感を伴った全身操作には相応の身体的・認知的負荷を要する課題があった。本研究では,AIが動作計画を立てた追加肢の運動を、ユーザの手の運動に同期して半自律的に実行する制御手法を提案する。腕を同時に複数本動かしてタスクを行っているようユーザに感じさせることで、行為主体感保持と操作負荷軽減の両立を図る。
- 3G-30
-
三人称視点VRにおける身体所有感の切り替えとその影響要因の検討
〇胡 佳儀(東京大学)、郭 凱(東京大学)、康 中睿(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - 三人称視点VRでは,アバターと大いなる存在の双方を操作可能だが,状況に応じた身体所有感の変化は十分に明らかになっていない.本研究では,アバタータスク種別と大いなる存在の関与度を操作し,各対象に対する身体所有感の主観的変化を評価した.その結果,大いなる存在の関与度が高い場面ではそちらに所有感が移りやすく,アバターが積極的にインタラクションする場面ではアバター側への所有感が強まる傾向が確認された.
- 3G-31
-
足の半拘束状態におけるアバタの全身姿勢推定
〇真柄 智輝(広島市立大学)、脇田 航(広島市立大学) - 本研究ではユーザの足を半拘束した状態において6点トラッキングのようにアバタの全身の姿勢を推定する手法を提案する。具体的にはスリッパ型のデバイスを使い、足の動きを力センサで入力することによって、アバタの足と腰のリグの位置と姿勢を推定し、疑似的なトラッカーの位置姿勢とすることによって、HMDと両手コントローラによる6点トラッキングされた状況に見せかける。
