Sept. 11 2024
9月11日
技術・芸術展示コアタイム 12:40-14:20 (終日展示可能)
- 1G-01
-
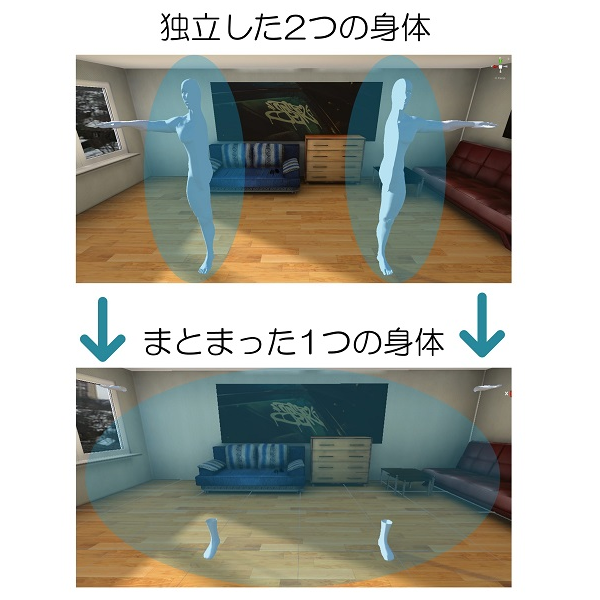
Invisible Split Body:手足のみの透明身体を用いた1つの身体として知覚される範囲の拡張
〇近藤 亮太(東京大学)、廣瀬 通孝(東京大学) - 分裂した半身の位置を操作することで,自己位置を拡張できる。しかし,多くの体験者が近い距離での分裂以外のレイアウトでは,独立した2つの身体として知覚していた。2つの身体の所有感は,1つのよりも弱いことがわかっている。そこで本研究では,参加者の補完によって全身を知覚する手足のみの透明身体を用い,様々なレイアウトにおいても1つのまとまった身体として知覚させ,身体所有感を維持する方法を提案する。
- 1G-02
-
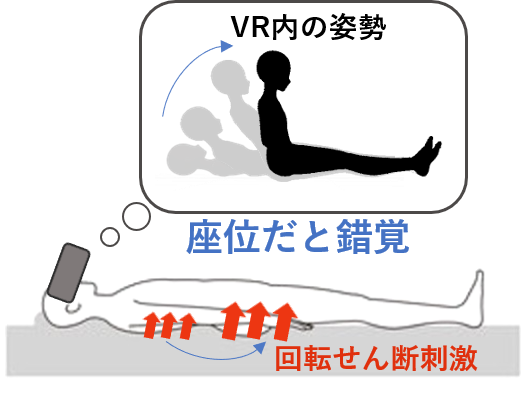
仰臥位のVRユーザに対する姿勢錯覚を誘発可能な回転せん断刺激提示ベッド型システムの基礎検討
〇岩崎 晃大(奈良先端科学技術大学院大学)、平尾 悠太朗(奈良先端科学技術大学院大学)、萩森 大貴(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、堀江 新(慶應義塾大学大学院メディアデザイン研究科)、清川 清(奈良先端科学技術大学院大学) - 仰臥位をVR体験に活用するためには,仰臥位のままで立位を認知させる感覚を提示することが課題である.そこで本研究では,仰臥位から立位への遷移を模倣した視触覚刺激を提示することで立位錯覚を誘発し,姿勢認知を一致させることを試みる.触覚刺激には回転せん断刺激を用いる.本稿では,仰臥位から立位への姿勢遷移の第一歩として,仰臥位から座位までの姿勢錯覚を誘発するために試作したベッド型システムについて報告する.
- 1G-03
-
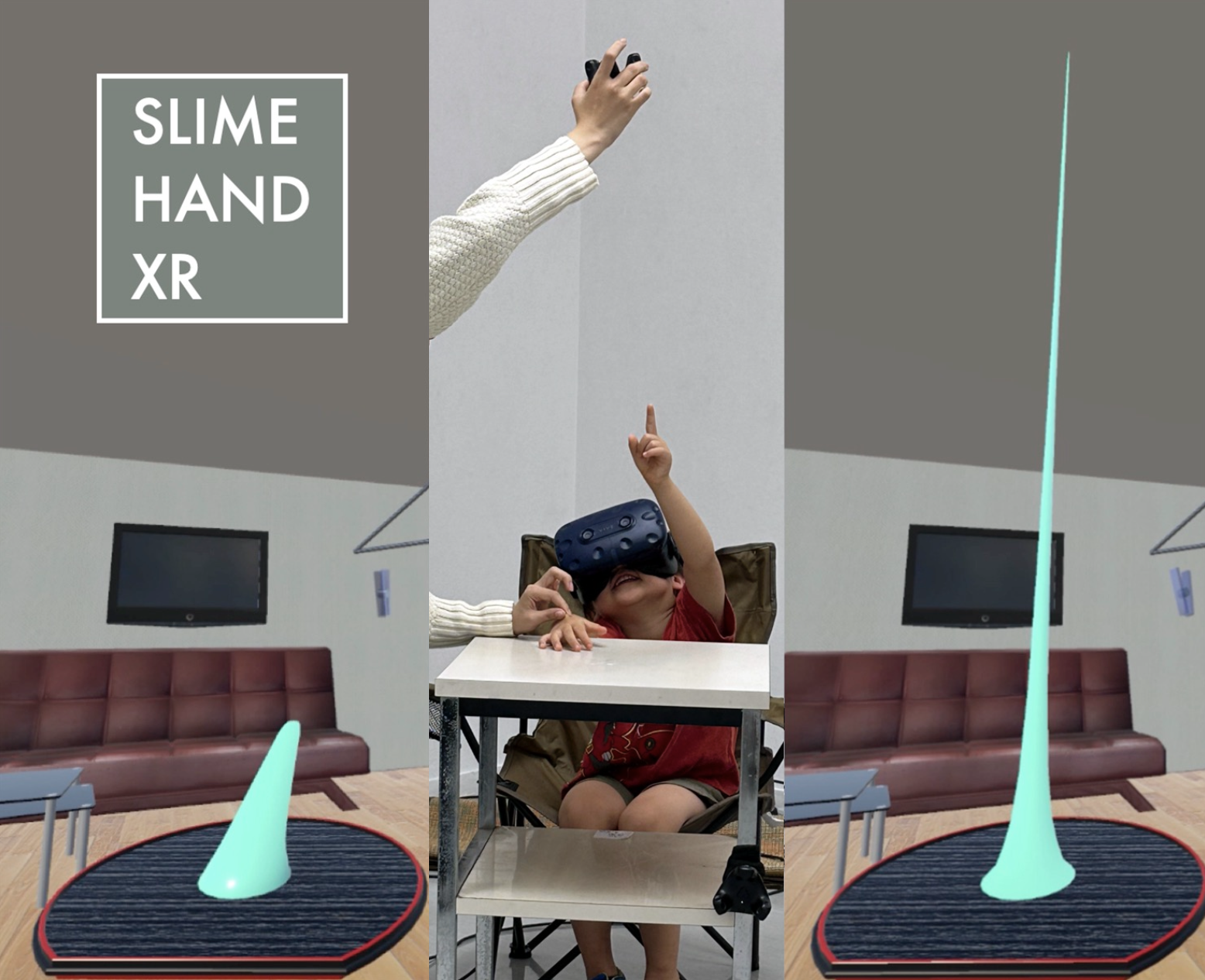
Slime Hand XR -HMD空間における皮膚変形錯覚の設計-
〇佐藤 優太郎(名古屋市立大学大学院)、伊藤 杏(名古屋市立大学大学院)、元橋 洸佐(名古屋市立大学大学院)、鈴木 剛(保与堂)、小鷹 研理(名古屋市立大学大学院) - スライムハンド錯覚は皮膚の過剰な変形感覚が生起する身体錯覚である。この錯覚を仮想空間上で設計することにより、実空間上の錯覚誘導よりも自在な皮膚形状の知覚が可能となる。本研究では、HMD空間上のCGによるスライムの描写においても、錯覚効果が再現されるかどうかを検証した。主観評価の結果から、仮想空間上においてもスライムハンド錯覚の効果は再現された。さらにはCGを用いることでより自在な皮膚変形が実現した。
- 1G-04
-
多点触覚デバイスの検討
〇鄭 竣勻(東京工芸大学)、曽根 順治(東京工芸大学)、大田原 佑哉(東京工芸大学)、崔 通(東京工芸大学) - XRやメタバースの高まりの中、バーチャルリアリティ(メタバース)や、人と共生するロボット、遠隔ロボット操作などには、柔軟な薄膜触覚デバイスが必要とされている。本研究室で開発している多点触覚デバイスの多点の同時制御方法を報告する。

- 1G-05
- 取り下げ
- 1G-06
-
おとひふ:音を使った肘皮膚の変形錯覚
〇髙橋 奈里(名古屋市立大学大学院)、佐藤 優太郎(名古屋市立大学大学院)、小鷹 研理(名古屋市立大学大学院) - スライムハンド錯覚は、選択的に皮膚イメージを変調させることができる錯覚である。我々は、錯覚が生起する理由として、皮膚が空間的な位置センサを持たない組織であることを挙げている。今回は、位置を視覚でなく、聴覚である音で示すことによっても、皮膚イメージの変調感覚を生起させることができるのか、アンケート調査を行い検証した。その結果、音の周波数の高低で遠近感を表現することで、主観的な皮膚の伸長感が得られた。
- 1G-07
-
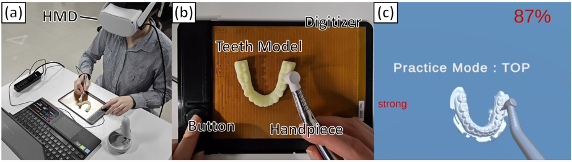
電磁誘導計測式ハンドピースデバイスと歯列モデルを用いた小型XR歯科切削訓練システム
王 宇卉(東北大学)、〇高嶋 和毅(芝浦工業大学)、伊藤 雅充(株式会社ワコム)、小堀 武(株式会社ワコム)、朝倉 僚(株式会社ワコム)、藤田 和之(東北大学)、洪 光(東北大学)、北村 喜文(東北大学) - 既存のXR技術を用いた歯切削訓練システムは触覚デバイスを用いるものが多く,全体的にシステムのサイズやコストが大きくなりがちである.そこで本研究では,3Dプリンタで印刷した歯列モデルに直接ハンドピースを当てるパッシブハプティクスのアプローチでその課題の解決を図る.それを活かすために,まず電磁誘導方式を用いて歯周辺で高精度なトラッキングが可能なトラッキングプラットフォーム(デジタイザとハンドピース型デバイス)を開発し,高精度なハンドピース操作を可能とした.また,それらの計測情報をHMD内でVRとして強化表現することで,リアルで臨場感のあるVR歯切削体験を実現した.本技術展示では,そのような小型で低コストなXR歯切削訓練システム
- 1G-08
-
XRAYHEAD GARDEN
〇小鷹 研理(名古屋市立大学)、中山 愛唯(名古屋市立大学) - 我々の研究グループは、これまでに、ハーフミラーによって仕切られた二つの空間の光量を調整することによって、身体の一部が透過し、その中に任意のオブジェクトを定位可能な視触覚錯覚システムを発表してきた(XRAYSCOPE、XRAYHEAD)。本発表では、既存の頭部の透視・透触錯覚装置を拡張し、頭蓋骨の内部に侵入した実験者の手によって内部をまさぐられる感覚、および頭内にモノが置かれたままとなる感覚を与えるXRAYHEAD GARDENの展示を行う。

- 1G-09
-
Drummed Head:HMD空間における頭部の中動態的な離脱体験
〇加賀美 果歩(名古屋市立大学大学院)、鈴木 剛(HOYODO)、小鷹 研理(名古屋市立大学大学院) - 本研究では、HMDを用いて頭部離脱を体験できるシステムを構築した。身体の最小単位としての頭部に着目し、頭部の着脱をトリガーとした身体所有感を生起させることを目的としている。HMDを装着した体験者が太鼓を逆さまにして机に叩く動作を行うと、それに伴いアバターの頭が吹っ飛ぶことで、自分の頭が吹っ飛んだような感覚が得られる。その感覚に対し主観評価を行ったところ、85%が肯定的であった。

- 1G-10
-
物体の持ち下げを主体とした動作における重量知覚Pseudo-haptics手法の提案
〇島村 一輝(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - Pseudo-hapticsと呼ばれる触覚提示技術を用いた重量提示手法が注目を集めている.一方で,そのほとんどが物体の持ち上げ時に重量提示するものであり,物体を持ち下げる動作によって重量提示可能であるかは明らかでない.我々は従来手法の持ち下げ動作における有効性を検証した後,新たに考案した持ち下げ動作時の重量提示手法の効果について検証する実験を行った.その結果,提案手法の一定の有用性が示された.
- 1G-11
- 取り下げ
- 1G-12
-
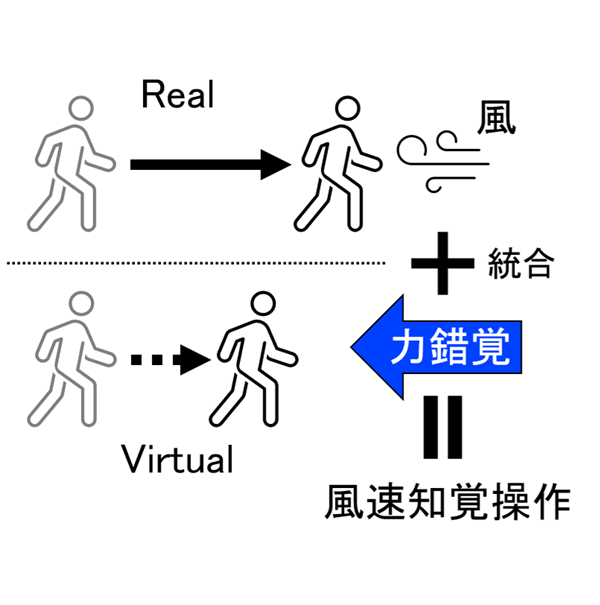
歩行の移動量操作によるPseudo-hapticsを用いた風速知覚の増強
〇鷹觜 慧(東京大学)、伊東 健一(Diver-X 株式会社)、細井 十楽(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - ファンによる強風提示では装置の大型化等が問題となる。本研究は、この課題に対しPseudo-hapticsを用いて実際の風を強く知覚させることを提案する。検証のため、VR環境で小型ファンの風を提示し、風速とpseudo-hapticsを変化させた。一部の条件で風と同方向の力錯覚により風が強く知覚される傾向があった。この結果から、風による抗力がpseudo-hapticsで強く知覚されたと推測される。
- 1G-13
-
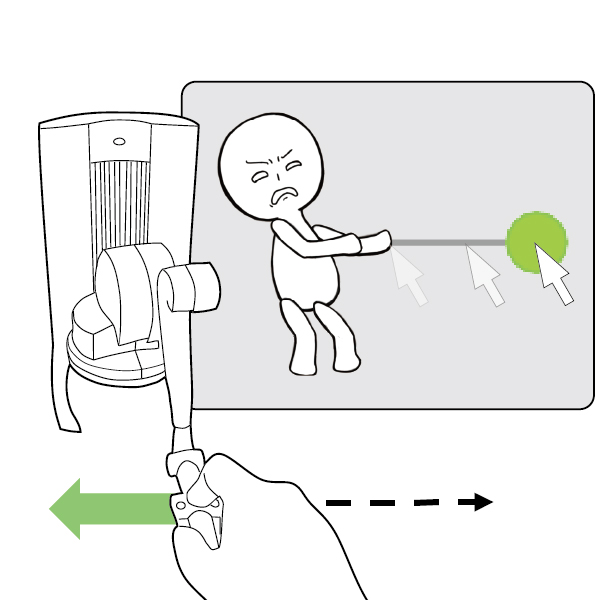
エージェントの表情により生起する力覚の物理量による定量化
〇亀岡 嵩幸(筑波大学)、松山 菜々(筑波大学)、松田 壮一郎(筑波大学)、蜂須 拓(筑波大学) - これまでに我々はディスプレイとマウスで構成された人とエージェントとのインタラクティブシステムにおいて,エージェントの表情がネガティブに変化するとニュートラルな表情と比べて大きい力覚が生起することを示した.本稿では,この力覚を物理量による定量化のため力提示装置を導入した心理物理実験について報告する.
- 1G-14
- 取り下げ
- 1G-15
-
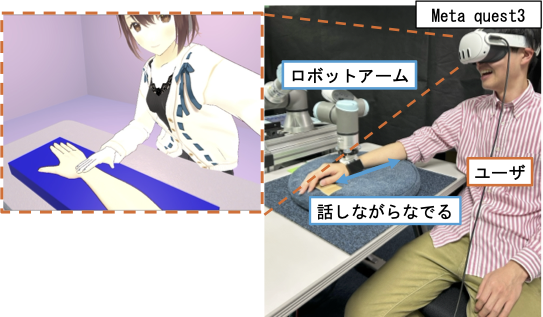
癒し体験:VR/ARエージェントによる心地よい「話しながらなでる」動作
〇新江田 航大(奈良先端科学技術大学院大学)、澤邊 太志(奈良先端科学技術大学院大学)、神原 誠之(奈良先端科学技術大学院大学、甲南大学)、加藤 博一(奈良先端科学技術大学院大学) - ロボットによる「話しながらなでる」動作は人の快感情を増加させ痛みを軽減する効果が確認されている.しかし,人間の感覚は90%以上が視覚情報であるため,どのような人が,どのように「話しながらなでる」かによって,快感情や痛み軽減効果に変化があると考えられる.本研究では,VR/AR環境で人型エージェントによる「話しながらなでる」システムを開発する.このシステムは触覚,聴覚,視覚を統合した上質な心地よい体験を提供する.
- 1G-16
-
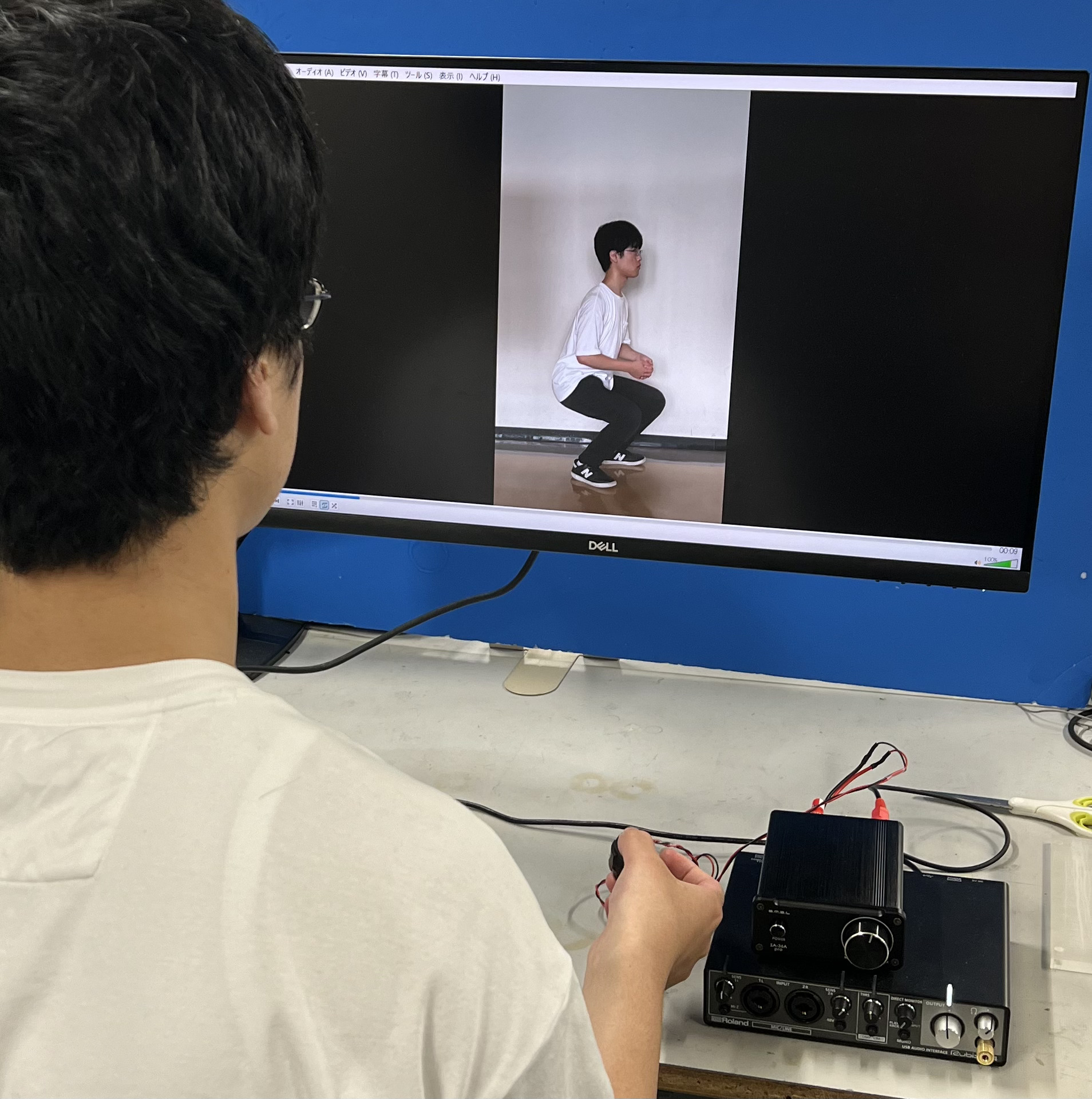
映像に基づく運動体感の自動生成に関する研究 第3報:逆動力学による力推定に基づく体感振動の提示
〇赤井 崚真(東北大学)、昆陽 雅司(東北大学)、田所 諭(東北大学) - 本稿では映像内の人物の動作により生じる力に基づいて振動刺激を自動生成し,力に応じて生成した振動刺激が運動体感に一致するかを確かめる.姿勢推定ライブラリを用いて人物の骨格を追い,逆動力学を用いて関節に生じる力を推定する.力を知覚インテンシティに対応付け,振動刺激を生成する.被験者実験で他の変数に基づいて生成した振動刺激と比較し,提案手法の有効性を検証する.
- 1G-17
-
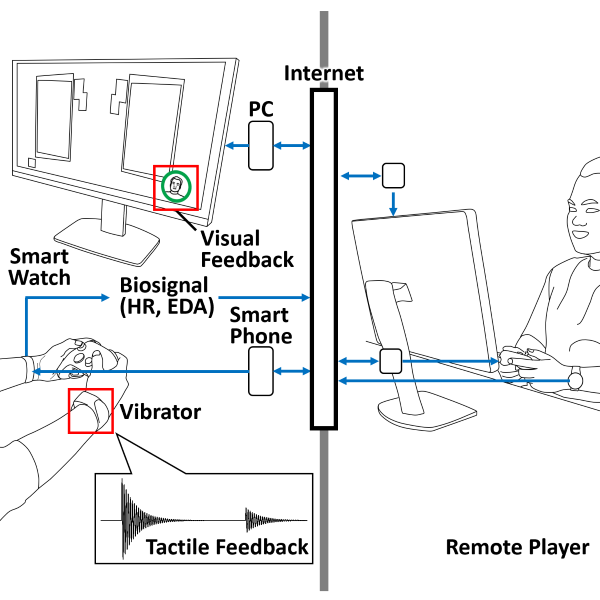
情動体験を拡張する疑似心拍振動提示システム(第4報):eスポーツプレイヤの存在感増強を目指した生理反応の提示
〇森 理樹(筑波大学)、高田 崇天(筑波大学)、梶浦 雅之(筑波大学)、ハサン モダル(筑波大学)、蜂須 拓(筑波大学) - 我々はこれまでに,リモートコミュニケーションにおける社会的信号の触覚的伝達を目的に,感情の時間的変化(情動)を想起させる人工的な心拍を模した振動刺激(疑似心拍振動)の設計に取り組んできた.本発表では,eスポーツにプレイヤの存在感の増強を目指し,生理反応を計測して疑似心拍振動によって遠隔のプレイヤに実時間で相互に伝達するシステムの設計について報告する.
- 1G-18
-
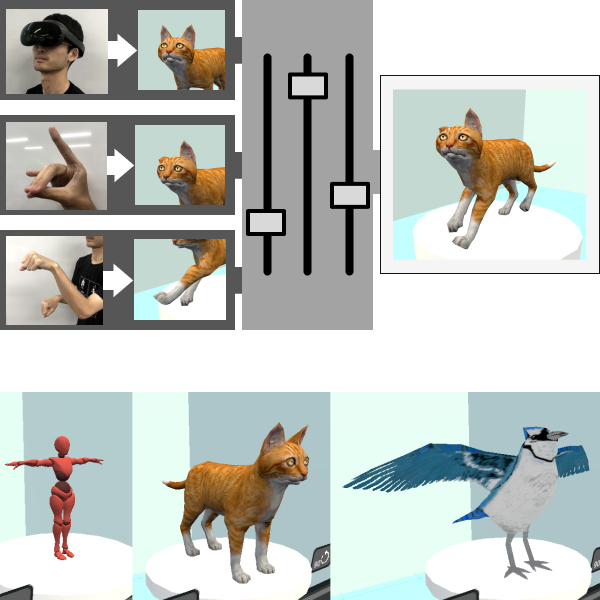
動作変換とその重ね合わせによる動物キャラクタアニメーションの作成
〇山口 周(東京大学)、畑田 裕二(東京大学)、鳴海 拓志(東京大学) - ヒトとは異なる身体構造を持つ動物等のキャラクタのアニメーションは様々な映像媒体で活用されているが,モーションキャプチャのような手軽な作成方法が少ない.本研究では,ユーザの身体動作をキャラクタの特定の身体部位の動作に変換して割り当てたアニメーションを作成でき,それらのアニメーションを重ね合わせることで,複雑なキャラクタアニメーションを手軽に作成できるツールを提案する.ユーザスタディの結果,参加者は概ね10分以内に動物キャラクタの全身アニメーションを作成できた.
- 1G-19
-
陶芸における身体動作の特徴抽出を目的としたFMGシステム〜ハードウェアの基礎検討〜
〇三堀 二知加(慶應義塾大学)、南澤 孝太(慶應義塾大学)、堀江 新(慶應義塾大学) - 身体動作の特徴抽出において筋活動計測が用いられており、その際にはEMGを用いることが一般的である。しかし、装着の複雑さや発汗による皮膚インピーダンスの変化が計測に影響を与えることから、使用シーンが限定的である。FMGを用いた筋活動計測は装着が容易であり、発汗や接触の影響を受けづらいことが報告されている。本研究では陶芸の技能に着目し、FMGによって筋活動の計測を行うシステムを開発し、実際の現場での運用を行った。

- 1G-20
- 取り下げ
- 1G-21
-
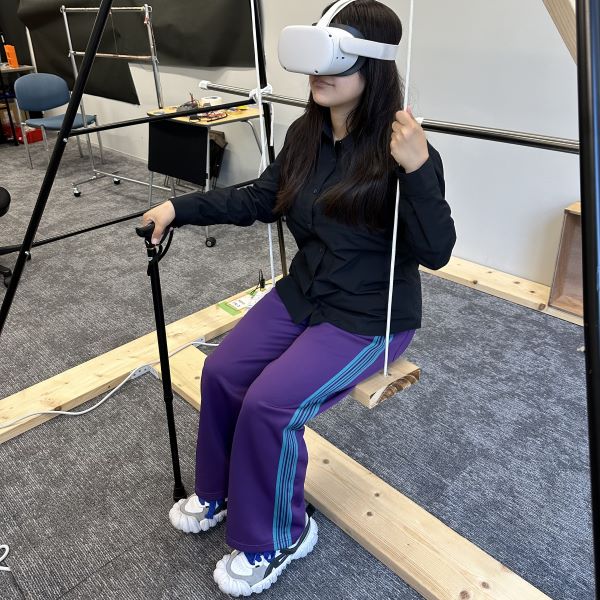
ブランコ型VRでの体の支持条件が揺動感覚に与える影響の分析
〇潘 虹羽(立命館大学)、安藤 潤人(立命館大学)、李 亮(立命館大学)、野間 春生(立命館大学) - 現在、VR酔いの現象が課題となってきている。本研究ではVR酔いを引き起こす一つの原因と考えられる揺動感覚に着目し、同じコンテンツであっても体験方法の違いが揺動感に及ぼす影響を検証した。先行研究ではブランコ型のVRの体験時に足の接地有無で揺動感覚が大きく変わるという現象を評価した。本報告ではその要因を探ることを目的として、杖や手すりなどの異なる体験条件下で実験を行い、それぞれの揺動感覚を比較評価した。
- 1G-22
-
多様な姿勢に対応したワイヤレス足裏振動デバイスによるバーチャル歩行体験
〇中村 純也(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - 本発表では、バーチャル歩行体験を実現するワイヤレス足裏振動デバイスを開発した。このデバイスは、振動子と圧力センサによるバーチャル歩行の制御とフィードバックを提供する。前足部と踵部の振動子は、歩行に同期して足裏への振動を提示し、歩行する地面質感に応じた振動を提示する。6つの圧力センサは、足裏の荷重変化を捉え、歩行方向を制御する。ユーザーは立位や座位、仰向け姿勢など身体的制約に左右されず体験できる。

- 1G-23
-
Tape-ticsを用いた新たな触覚ツールキットの開発と応用
〇パニアグア カルロス(奈良先端科学技術大学院大学)、太田 裕紀(奈良先端科学技術大学院大学)、平尾 悠太朗(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - 「Tape-tics」は、柔軟なフレキシブル基板に小型振動子を配列したテープ型デバイスである。任意の長さに切り取り、任意の場所に貼り付けることができ、特定の部位に合わせた設計や複雑な配線が不要である。開発したGUIコントローラを用いて、任意の触覚表現をプログラムすることが可能。さらに、マイクロコントローラに様々なセンサーを組み合わせることで、多様な用途に対応できる。本論文では、このTape-ticsを用いたさまざまな応用例を紹介する。

- 1G-24
-
Motion-Less VRの研究:五指・多自由度運動の実現に向けた基礎開発
〇望月 典樹(日本工業大学) - Motion-Less VRは、実身体の運動を必要としないVRシステムである。このシステムでは、固定された実身体の関節トルクを計測し、動力学に基づいてバーチャル身体の運動を生成し、その結果を感覚器にフィードバックする。これにより、実環境による空間的・物理的な制約を受けずにバーチャル身体の操作が可能となる。本研究では、五指の屈曲・伸展および内転・外転運動を可能とするシステムの開発を行う。

- 1G-25
-
馬の視野角を魚眼カメラを用いてリアルタイムに体験するHMDデバイスの開発
〇齋藤 達也(東京工芸大学)、高村 環(東京工芸大学)、阿部 一直(東京工芸大学) - 本研究では、馬の視野を体験できるHMDデバイス『U-HMD』を提案する。デバイスの左右に2台の魚眼カメラを取り付け、映像を体験者の両眼に提示することで、馬の視野体験を試みる。デバイスの設計には3Dプリンタを用いており、本発表ではリアルな馬型の外装の制作方法も紹介する。また、U-HMDを装着することで、馬の視野の特徴を体験できるかどうかを調査・実験した。

- 1G-26
-
高松塚古墳のデジタル再現と理解支援のためのMRコンテンツ
〇宋 文澤(関西大学)、林 武文(関西大学) - 本研究では,特別史跡の高松塚古墳とその中にある壁画の理解支援を目的として,MRシステムを開発した.体験者はハンドトラッキングを通じて,直観的な操作感覚で壁画を鑑賞し,さらに懐中電灯のインターフェースを開発し,体験者が発掘時の壁画と復元図を同時に観察し見比べることを可能にした.また,天井にある壁画を鑑賞する際の身体負担を軽減する方法も提案した.

- 1G-27
-
生活ログに合わせて動く筆記用具を用いたプレイフルなリフレクション手法「カロモン」の提案
〇大平 桜子(法政大学)、中西 ゆき菜(法政大学)、松浦 奏都(法政大学)、中條 麟太郎(東京大学 大学院学際情報学府)、矢作 優知(東京大学 大学院学際情報学府、日本学術振興会特別研究員DC)、松井 克文(東京大学 産学協創推進本部)、ソン ヨンア(法政大学) - 生活ログの可視化によりリフレクションを支援するデジタルツールが普及しているが、その多くは定量的かつ一方的な情報提供に偏重している。本研究では、デジタルツールを用いた、オルタナティブなリフレクションの可能性を探索することを目的とする。計算機と協働して身体的にリフレクションを行う手法として、生活ログに合わせて物理的に動く筆記用具を用いて、ユーザ自身が生活のログをプレイフルに描画する活動を提案する。

- 1G-28
-
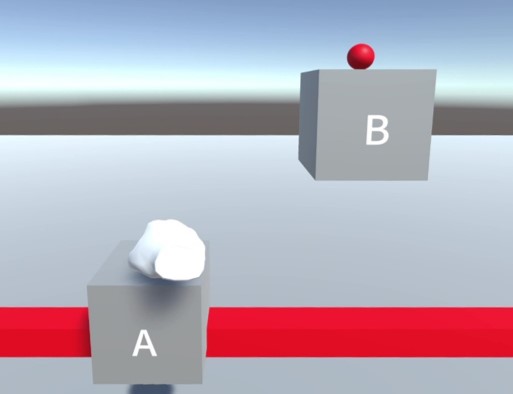
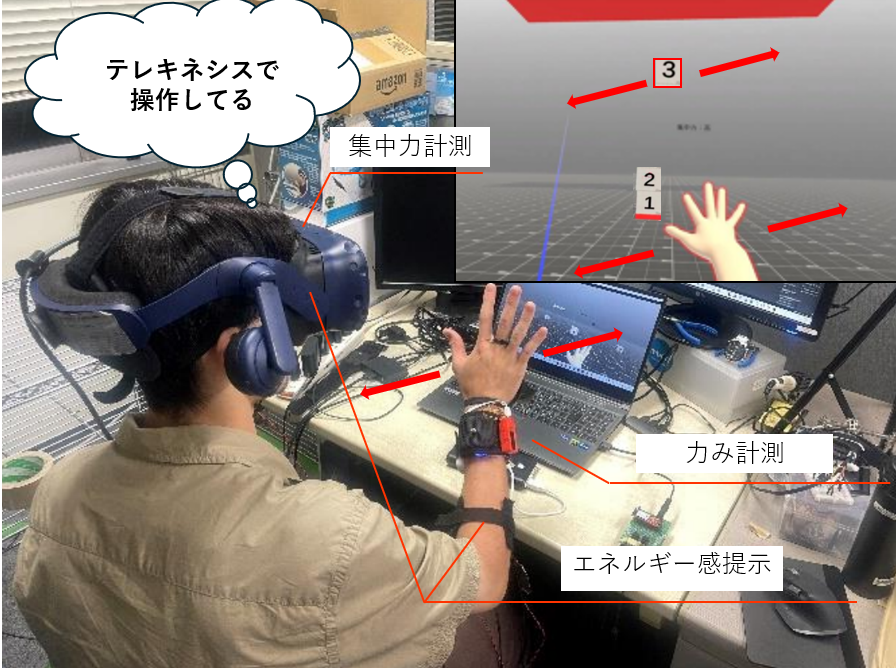
VRにおけるテレキネシス感を表現するシステムの構築と評価
廣田 雄大(電気通信大学)、〇中谷 信吾(電気通信大学)、櫻井 翔(電気通信大学)、野嶋 琢也(電気通信大学)、広田 光一(電気通信大学) - テレキネシスは,遠隔にある物体を直接触れずに操作できる能力である.フィクション作品では,テレキネシス使用者は,手等に力を込めて対象を思い通りに操作する描写が見られる.作品の描写からは、物体に触れているわけではないにも関わらず、対象に対する行為主体感を伴っていると予想される.本研究では,VRテレキネシス体験手法を構築し,テレキネシスを体験しているような身体感覚や行為主体感を得ることができるか調査した.
- 1G-29
-
生活を映す分身植物との共同生活に向けたデータマッピング手法の開発
〇PENG HANRUI(慶應義塾大学大学院メディアデザイン研究科)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、Zhou Songchen(慶應義塾大学大学院メディアデザイン研究科)、Liu Tianqi(武蔵野美術大学)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 本研究では、個々の日々の行動と生理反応をデータ化し、自身の生活リズムと同調して成長する分身植物を提案する。このアプローチにより、異なる時間軸のデータを統合し、それに基づいて個人の生活パターンを反映する分身植物を生成する。このシステムは、個人が自らの行動をリアルタイムで視覚化することで、より深い自己理解と自己認識を支援するものである。

- 1G-30
-
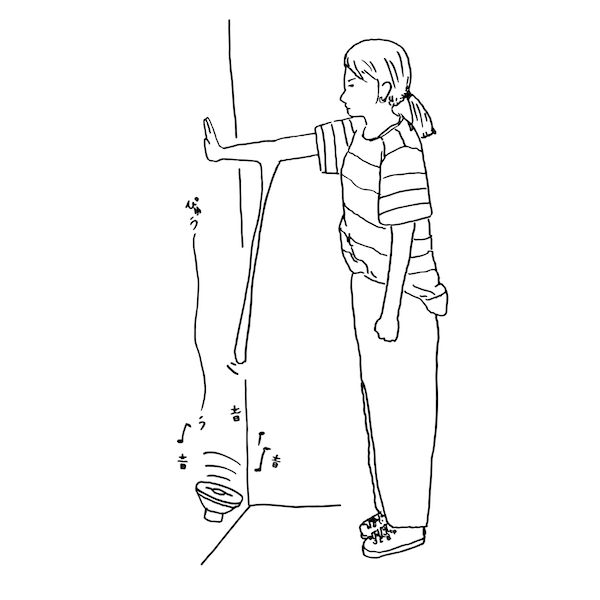
星のリリィ
〇小木曽 直輝(岐阜大学)、阪井 啓紀(岐阜大学)、野倉 大輝(岐阜大学) - IVRCチャレンジ枠。フェイストラッキングによりモニターの画面が動く擬似VRにより体験者はモニターに向かって口を大きく開け見回すことで、周りの敵キャラクターたちを吸い込むことができる。さらに、吸い込んだ敵キャラクターの能力に応じて、体験者が手に持つ「魔法のステッキ」は見た目と能力が変化し、振ることで攻撃を行うことができる。

- 1G-31
-
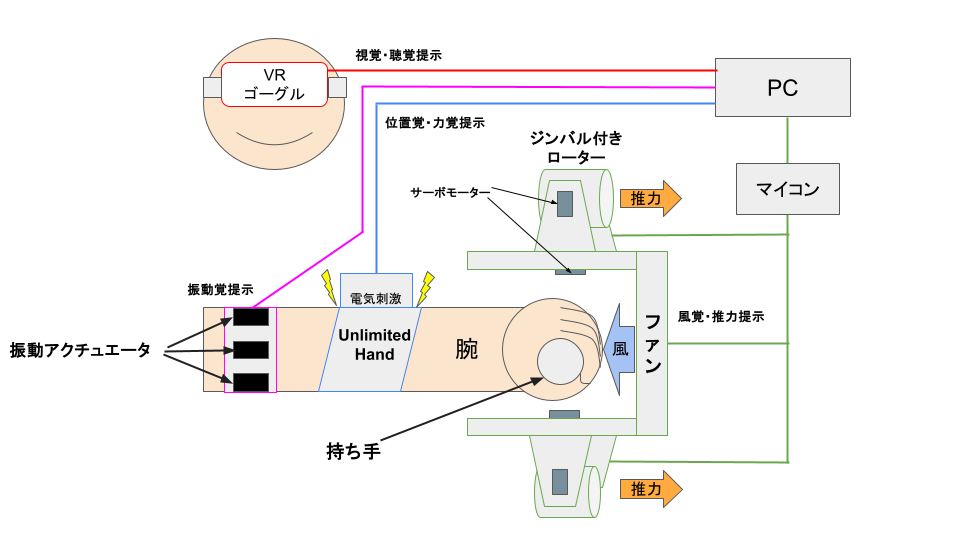
飛んでけ鉄拳!Rocket Puncher
〇磯本 惣太郎(東京農工大学)、藤野 創(東京農工大学)、岩永 将樹(東京農工大学)、張替 琢生(東京農工大学)、赤塚 悠斗(東京農工大学)、向原 蒼葉(東京農工大学) - 本企画では自分自身の体から切り離された腕がロケットの様に飛んで行く感覚を再現し,その腕を操作し標的に当てる体験を提供する.体験者はHMDによる視聴覚提示,前腕部に装着したファンとマルチローターによる推力・風覚提示,振動アクチュエーターによる振動覚提示,FESによる筋収縮を使った位置覚・力覚提示によって腕が飛翔する感覚を擬似的に体験する.