Sept. 17 2025
9月17日
口頭発表 10:10-10:50 触覚2
座長:田辺 健(産業技術総合研究所)
- 1D2-01
-
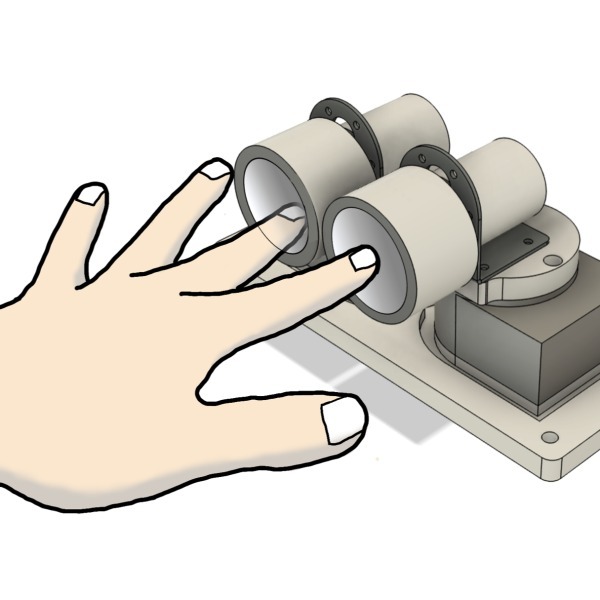
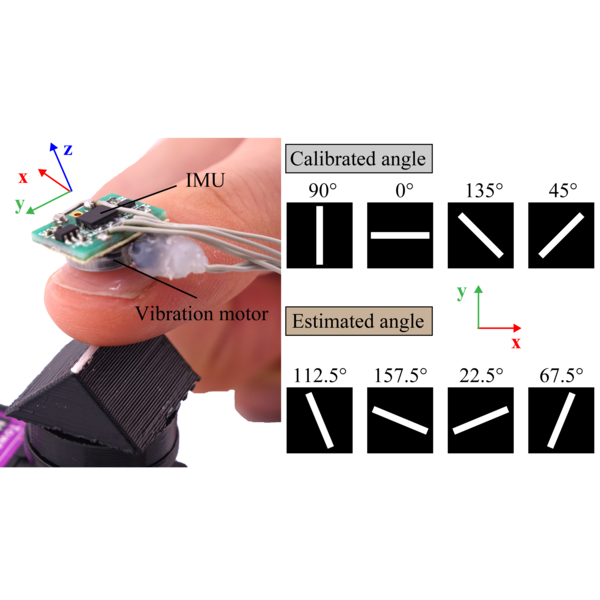
爪からの加振による指腹部触覚センシング(第4報) 確率重み付けによるエッジ方向の連続値推定
〇今 笙羽(電気通信大学)、溝口 泉(電気通信大学)、梶本 裕之(電気通信大学) - 我々はこれまで、爪に偏心モータとIMUセンサを搭載し、爪からの振動を計測することで、指腹を覆うことなく指腹の接触情報を推定することを試みてきた。しかし、これまでは学習した接触対象のみしか推定できず、また連続的な推定値の算出が困難であった。本稿では、推定確率の重み付けから推定値を連続値として算出する手法を提案する。指で触れたエッジの方向を連続値として推定可能かどうか検証を行った。
- 1D2-02
-
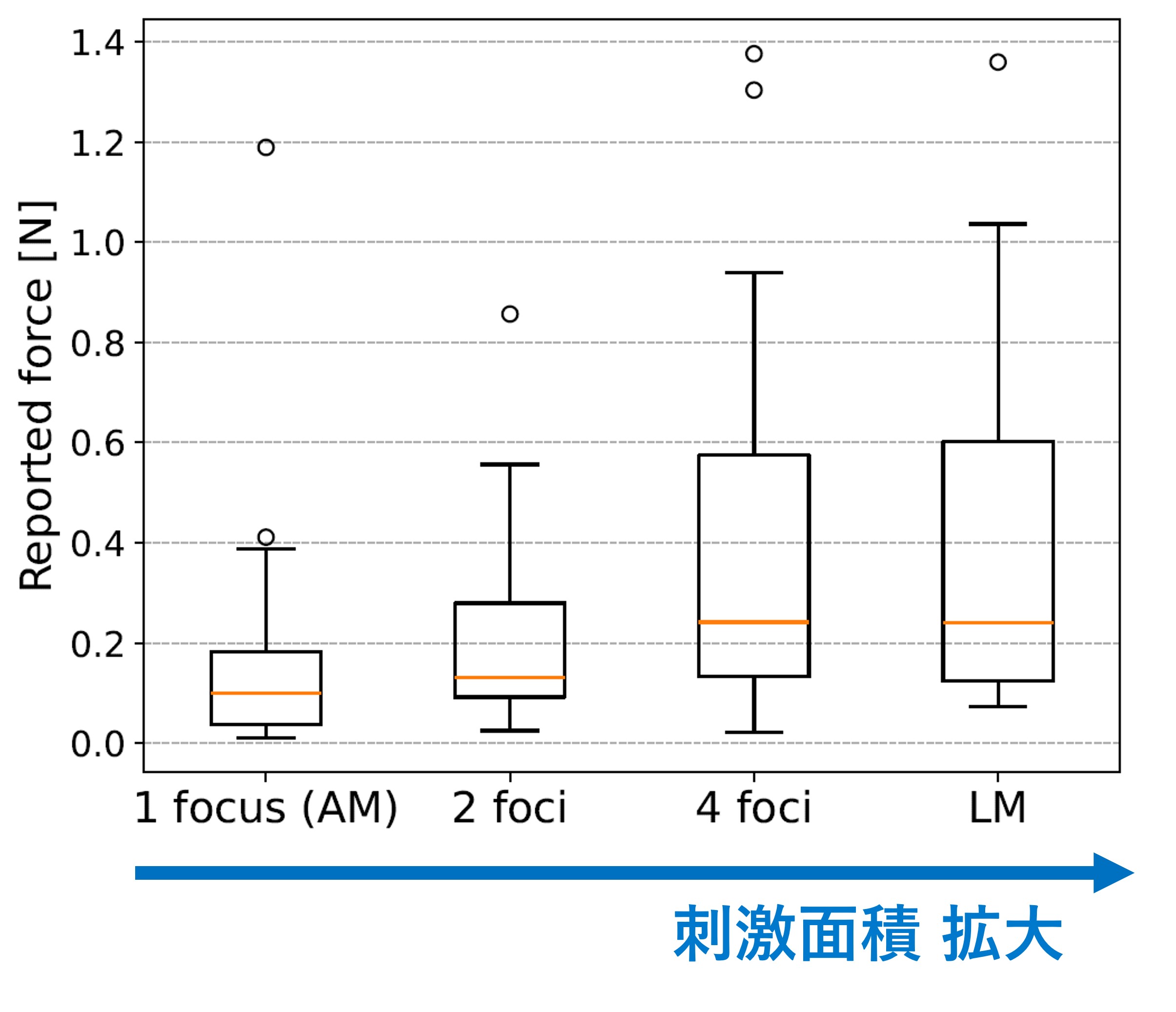
空中超音波における圧覚増強の要因分析: 振動分布面積と位相差の効果
〇森崎 汰雄(NTT株式会社 コミュニケーション科学基礎研究所)、宇治土公 雄介(NTT株式会社 コミュニケーション科学基礎研究所) - 超音波を集束させると、その焦点には数グラムの力が生ずる。近年、この力の点を数Hzでうごかすことで、10倍程度強い圧覚が提示できることが示されきた。しかし、この増幅を引き起こす知覚メカニズムは不明である。本研究では、この圧覚増強効果について、皮膚に生じる振動と刺激面積の観点から調査する。
- 1D2-03
-
透明吸引部と可視光を用いた同一部位への圧覚・温覚提示モジュールの開発とHMDとの統合
〇亀岡 嵩幸(九州大学) - 本研究では,ヘッドマウントディスプレイ(HMD)を用いたバーチャルリアリティ(VR)体験における没入感向上を目的として,吸引および可視光を利用した圧覚・温覚提示装置をHMDに統合する手法を検討する.本モジュールは光造形3Dプリンタを用いて作成した透明吸引孔と高輝度LEDより構成され,吸引圧錯覚による圧覚と可視光による光熱を空間的に同一の部位へ提示する.HMDへの内蔵とVRアプリケーションの開発を行い,デモンストレーションを行った.その結果,バーチャルオブジェクトの熱および圧覚を同時に提示することに成功した.

- 1D2-04
-
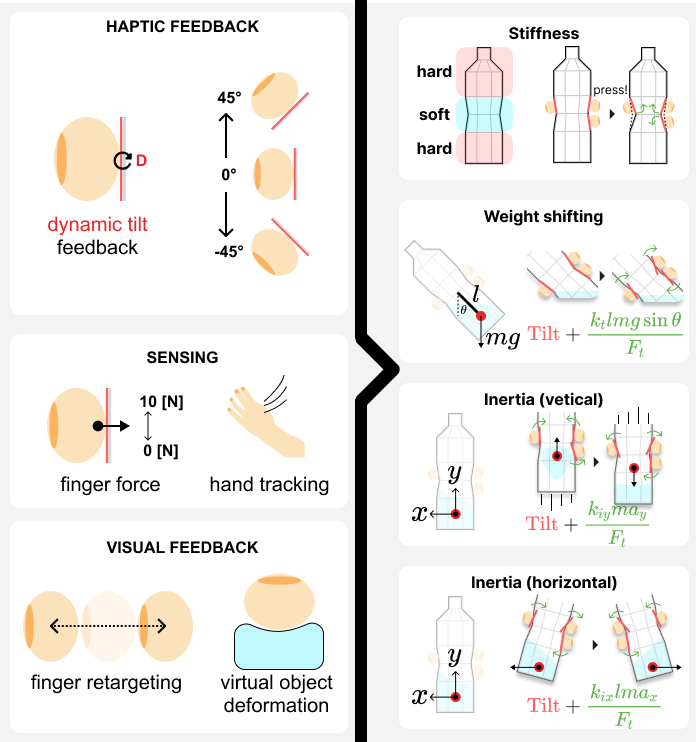
各指先接平面の動的な傾き操作による剛性・慣性提示
〇太田 裕紀(奈良先端科学技術大学院大学)、平尾 悠太朗(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - 視触覚メディアが一般に利活用される一方で,触覚メディアは未だ発展途上にある.特に触覚提示装置の開発において,触覚的な表現力と機構の煩雑さのトレードオフが既存手法の多くに通底する課題である.本研究では,簡素な機構を用いたバーチャルオブジェクトの把持・操作感覚提示を目的として,各指先接平面の傾き操作を用いた形状・剛性・慣性提示手法を提案する.
- 1D2-05
-
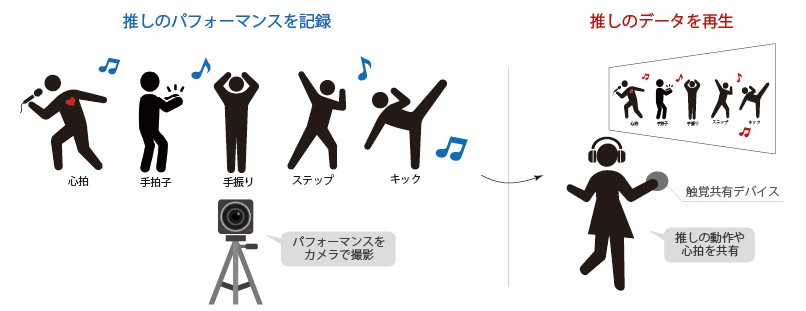
観客と演者の一体感向上のための触感共有に向けた体験デザインの検討
〇大久保 暖々子(慶應義塾大学大学院メディアデザイン研究科)、神山 洋一(慶應義塾大学大学院メディアデザイン研究科、シードルインタラクションデザイン株式会社)、堀江 新(慶應義塾大学大学院メディアデザイン研究科、株式会社commissure)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、石川 博規(株式会社 NTTドコモ)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 本研究は、パフォーマンス空間における推しとの一体感を高める体験デザインを提案する。従来の視聴覚中心の推し活に触覚チャネルを組み込むことで一体感が高まると考える。特に推し活においては、集団の中にいながらも推しとだけ繋がる関係性が、個人的な没入と集団的な一体感を両立させる。そこで本稿では初期検討として、触感共有デバイスを用いて触覚を共有し、推しとの個々のエンゲージメントを高めることを目指す。
- 1D2-06
-
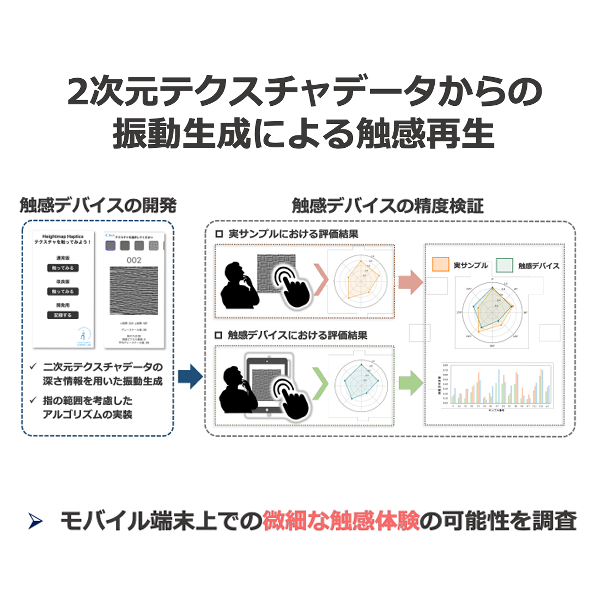
二次元テクスチャデータからの振動生成による触感再生
〇宮崎 裕貴(広島大学)、栗田 雄一(広島大学) - 人間は五感を通じて外界を認識しており、近年ではエンターテインメントや製品開発の分野でその活用が注目されている。特に、リアルな体験や感性品質の向上を目的とした技術開発が求められている。中でも触覚の再現に関する研究は盛んに行われているが、スマートフォンのような小型機器を用いた触覚提示はまだ少なく、実現すればその有用性は高いと考えられる。本研究では、スマートフォンを用いた振動による触覚ディスプレイの開発と、その性能評価を目的とする。
- 1D2-07
-
ファントムセンセーションによる体内振動知覚の生起条件
〇野田 諒太(名城大学)、柳田 康幸(名城大学) - ファントムセンセーションは2点を刺激すると,その間に1つの刺激を受けたと錯覚する現象である.これは腕や足の体表に加えて,身体内部に定位させることも可能だが,その詳しい条件については分からない.本研究では振動子を被験者の腕に取り付け,駆動させる位置を変えた際の体内定位条件について検証を行った.その結果,駆動させる振動子の位置を変えることによって,体内定位の割合は変化した

- 1D2-08
-
静電気力を用いた多層電極型触覚ディスプレイ
〇佐々木 洋哉(明治大学)、熊野 照久(明治大学) - 本研究は、電気触覚ディスプレイにおける、電極の多層化による触覚提示の表現力向上を目的とする。従来のXY平面上の電極配置に加えて、Z軸方向に電極を積層することで、複数の電界を独立に制御可能とし、より複雑かつ多様な触覚の提示を目指す。本講では、実機での実験に向けた、交流電圧出力回路の動作シミュレーション結果について報告する。
- 1D2-09
-
触覚提示性能の指標化のための知覚インテンシティに基づく定量評価法の検討
〇髙橋 慶(東北大学)、髙橋 哲史(東北大学)、昆陽 雅司(東北大学) - 触覚提示技術の発展に伴い、提示性能を客観的に評価する指標の必要性が高まっている。そこで本研究では、知覚インテンシティに着目し、異なる触覚デバイス間における提示性能を評価することを試みる。異なるデバイスに対して同一の知覚インテンシティ波形を提示し、出力された振動波形から再推定されたインテンシティとの誤差を複数の指標で定量的に評価することで、デバイスにおける知覚インテンシティの再現性を検証する。
- 1D2-10
-
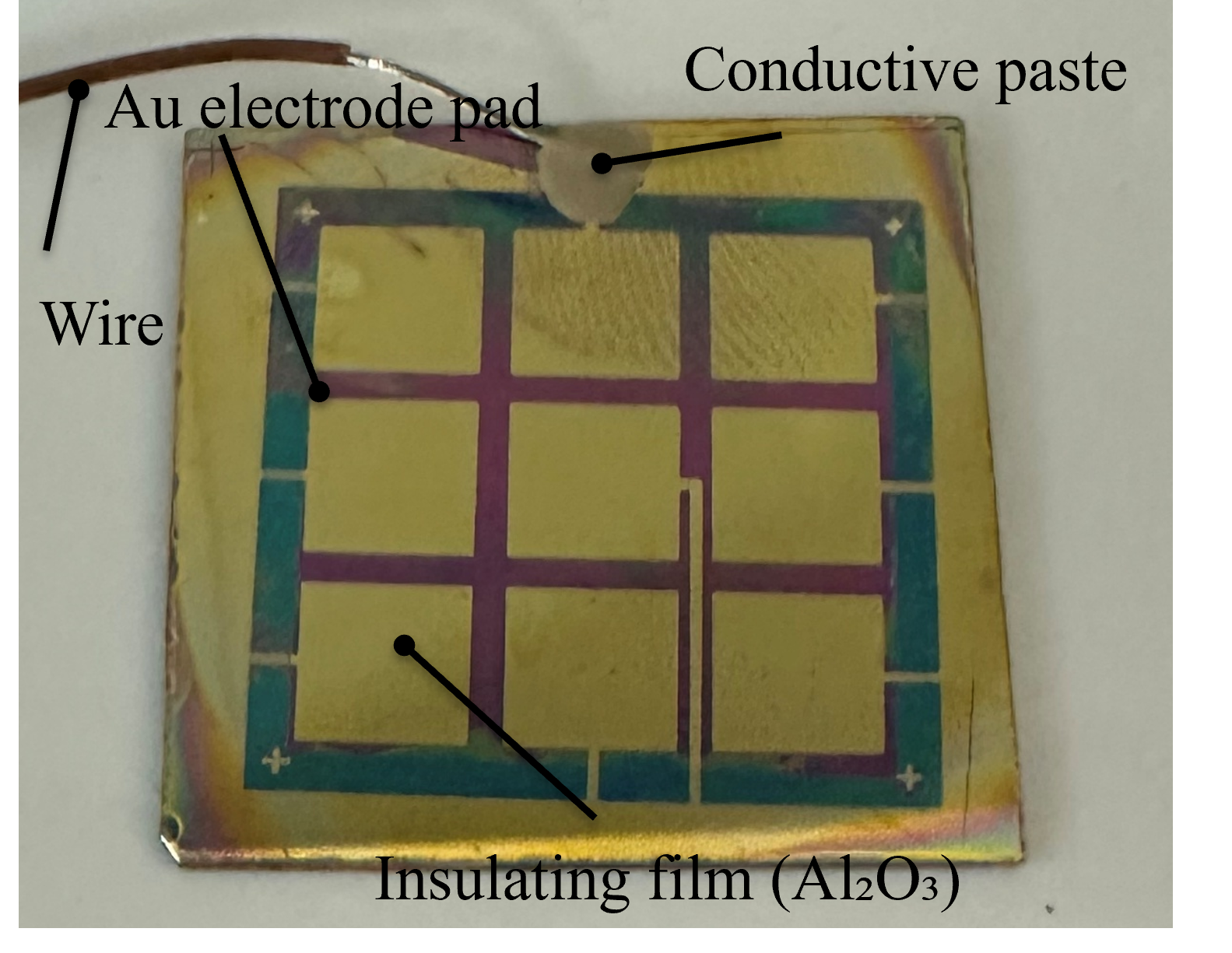
MEMS触覚センサによるアレイ化静電触覚ディスプレイの出力特性評価
〇佐野 竜雅(新潟大学)、野村 宏貴(新潟大学)、安部 隆(新潟大学)、寒川 雅之(新潟大学) - 静電引力型触覚ディスプレイは通常100V以上の高電圧を要するが、我々は電極のアレイ化により電圧を変えずに静電引力を増加できることを示した。本研究ではMEMS触覚センサを用いて摩擦力を定量評価し、アレイ化によって低電圧でも最大静止摩擦力が二次関数的に増加することを確認した。
- 1D2-11
-
オノマトペの提示による振動フィードバックの印象変化手法
〇溝口 泉(電気通信大学)、櫻井 翔(電気通信大学)、広田 光一(電気通信大学)、野嶋 琢也(電気通信大学) - 本研究ではスマートフォン上での代表的な触覚フィードバックである単純な振動と同時に画面上にオノマトペを表示した場合の触覚の印象の変化について調査した。オノマトペの触覚フィードバックとの同時提示は、ゲームなどにおいて一般的に利用される表現手法であるがその具体的な要因や機序は不明瞭である。今回の研究では7種のオノマトペと触感の異なる6つの物理スイッチを用いて、触感の違いについて調査を行った。

- 1D2-12
-
摩擦差と速度差によって生じる指間開閉錯覚の等価刺激量による定量的検証
〇藤本 伊吹(大阪大学大学院情報科学研究科)、杉原 尚理(大阪大学大学院情報科学研究科)、原 彰良(大阪大学大学院情報科学研究科、情報通信融合研究センター)、古川 正紘(大阪大学大学院情報科学研究科、情報通信融合研究センター)、前田 太郎(大阪大学大学院情報科学研究科、情報通信融合研究センター) - 2指での表面なぞりにおいて片方の指の摩擦を低下させると、距離変化がないにもかかわらず、指間距離が開閉するように知覚される。本研究ではこの錯覚が、スティック&スリップ振動に基づく主観的相対速度差に起因すると仮定し、物理的な速度差提示との間に等価刺激が成立するかを調整法により検証した。結果、摩擦差によって生じた錯覚量を物理的な速度差と等価な感覚刺激量として定量化できることが示された。