Thursday, 14 September
9月14日(木)
口頭発表 09:50 - 10:30 計測・機械学習
座長:加藤 史洋(早稲田大学)
- 3D2-01
-
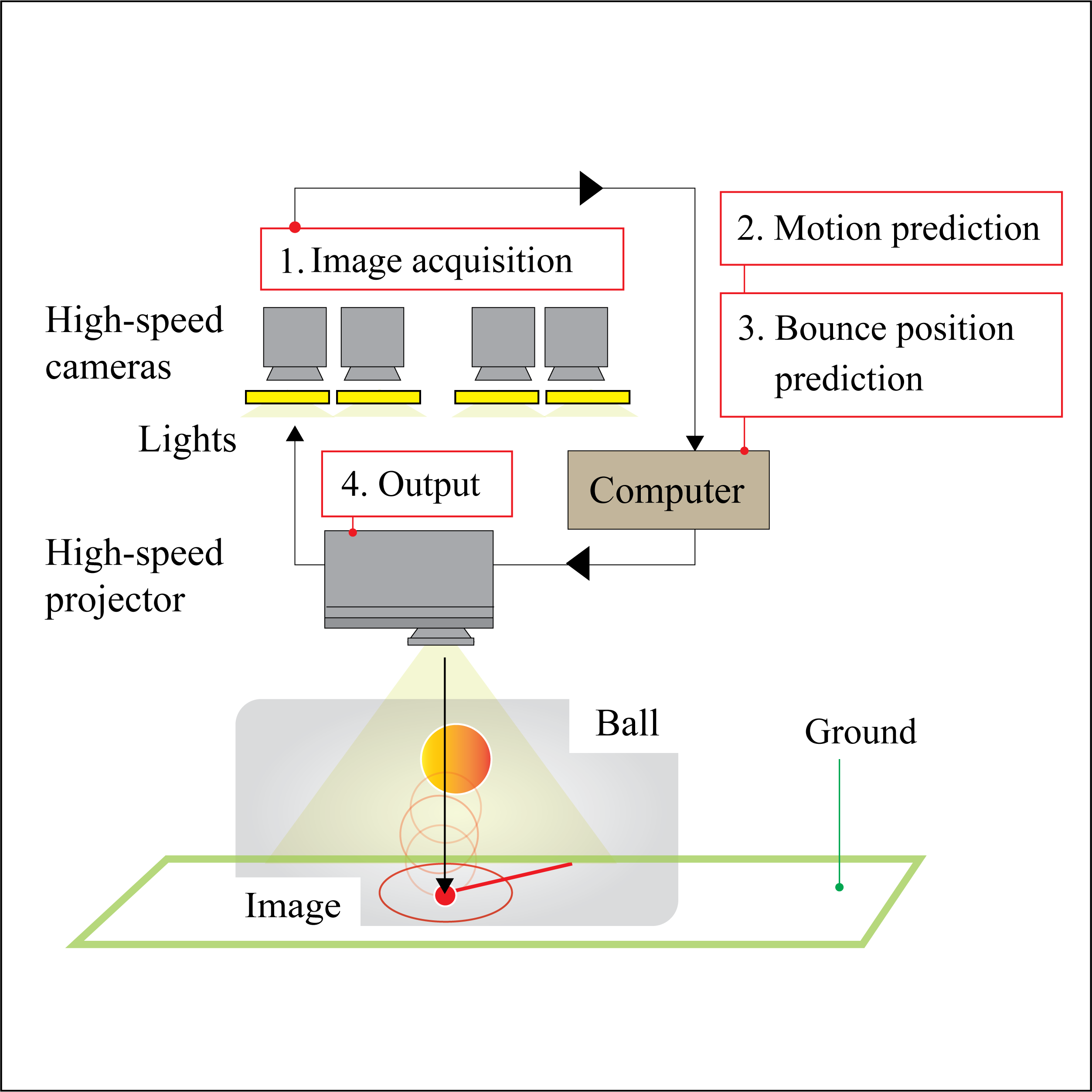
ボールのバウンド位置予測に基づくダイナミックプロジェクションマッピングの開発
栃岡 陽麻里(東京大学)、〇末石 智大(東京大学)、石川 正俊(東京理科大学) - 球技スポーツにおける運動学習促進のために,ボールの軌道に関する視覚的な補助情報は有用だが,一般の映像機器では計測から提示までに遅延の問題がある.予測情報をリアルタイムに提示する高速ビジョンと高速カメラを用いて,ダイナミックプロジェクションマッピングによるボールの着地位置に対する先読み情報提示を提案する.本稿では予測バウンド位置について,運動予測に基づく地面へのリアルタイム投影を,異なる計測フレームレート条件で評価した.
- 3D2-02
-
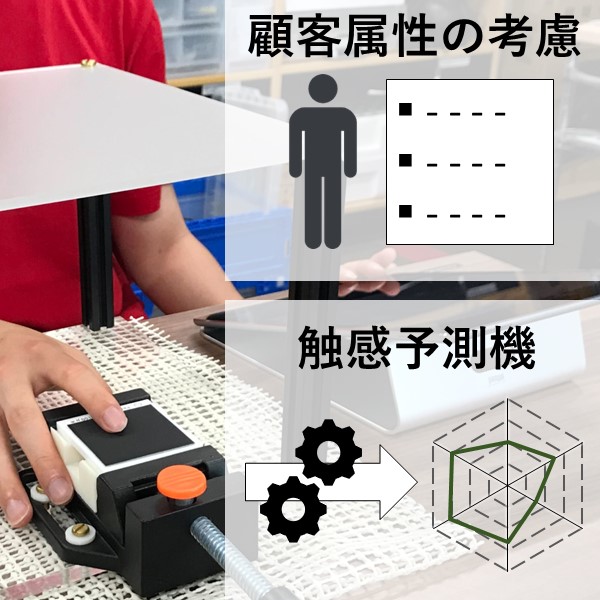
ハイトマップ画像特徴量と対象者属性情報に基づく表面テクスチャの触感推定
〇中西 大樹(広島大学大学院先進理工系科学研究科)、栗田 雄一(広島大学大学院先進理工系科学研究科) - 本研究は,表面テクスチャ形状と顧客属性情報をもとに触感を予測することで, 精度が向上するか調査することを目的とした。被験者を用いた触感評価実験を行いデータを収集し、予測にはハイトマップを利用した機械学習を適用した。精度検証の結果、特に顧客の性別、リスク選好、性格を考慮すると予測精度が向上することが判明した。
- 3D2-03
-
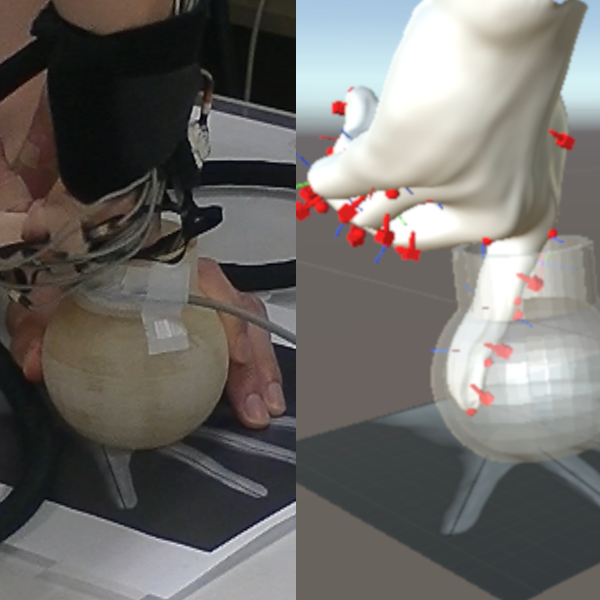
磁気式モーションキャプチャとパーソナルハンドモデルを用いた手指巧緻動作再現手法の検討
〇菊地 岳大(秋田大学)、齋藤 正親(秋田大学)、藤原 克哉(秋田大学)、中島 佐和子(秋田大学)、水戸部 一孝(秋田大学) - 現在主流の光学式ハンドトラッキングでは,物体の把持動作を計測する際,カメラの死角にある手指動作を計測できない.そのため,本研究ではカメラの死角が影響しない磁気式MoCapと本人の手から作成したパーソナルハンドモデルによる手指巧緻動作再現システムの構築を目的とした.手指の特徴点計測により位置合わせした3D-CGのハンドモデルを磁気式MoCapで得られたデータを用いて動作させることで手指巧緻動作の再現を試みた.
- 3D2-04
-
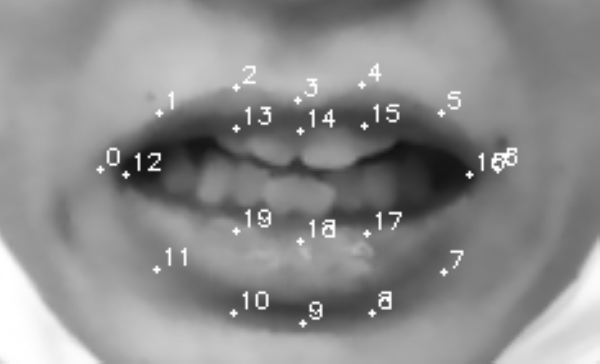
Webカメラを用いたVRゴーグル着用状態での表情認識に関する研究
〇吉田 北斗(東海大学)、影山 芳之(東海大学) - 仮想空間において、利用者のアバターが利用者と同じ感情を表出できるようになれば、より現実に近いものになると考えられる。そのため本研究では、VRゴーグルを着用した状態でもwebカメラで計測が行える口を用いて、感情を表出する際の口の開閉、口角の移動の時系列データの特徴を1DCNNによって解析し、表情認識の手法として有用であるかを調べた。結果から特定の感情に関しては口の結果のみから表情認識ができる可能性が示唆された。
- 3D2-05
-
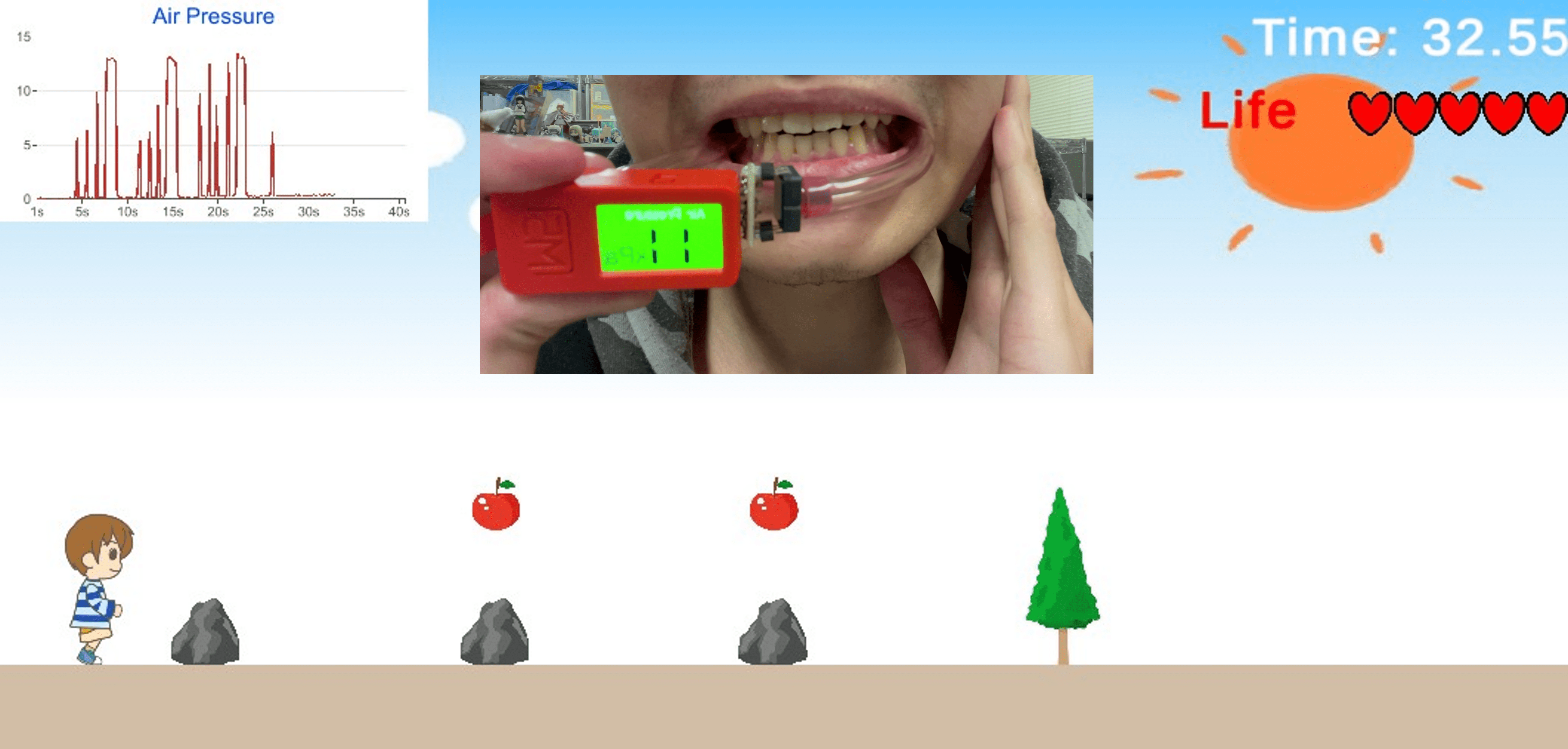
簡易型咬合力測定装置の開発とその応用に関する研究
〇青木 辰磨(電気通信大学)、櫻井 翔(電気通信大学)、広田 光一(電気通信大学)、野嶋 琢也(電気通信大学) - 子供の咬合力増強手段として、チューブを適切な力とリズムで噛む咀嚼トレーニングの実施が推奨されている。しかし、子供にトレーニングを継続させるのは容易ではなく、保護者が常に監視することも難しい。そこで、咬合力を測定・記録できる家庭用チューブ型咬合力測定装置を開発し、次いで計測した咬合力を入力としたシリアスゲームを作成した。本ツールにより、子供が適切な噛み方で楽しくトレーニングできることを目指す。
- 3D2-06
-
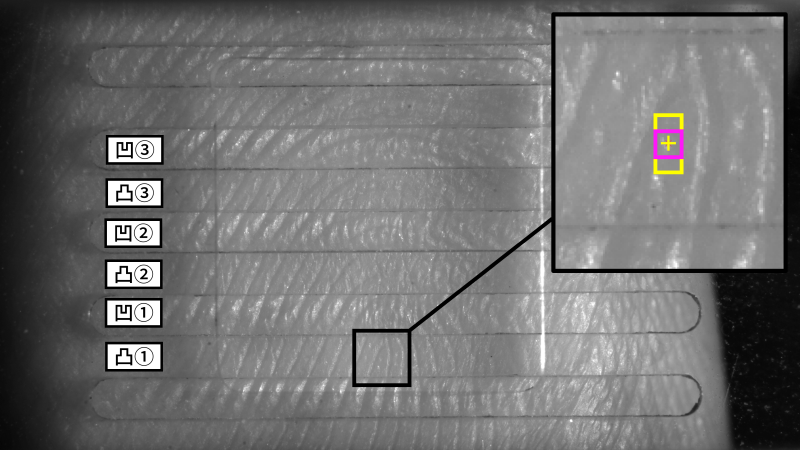
凹凸面なぞり時における指腹部表面の変位分布のマーカレス計測システム
〇境 侑里(富山県立大学)、田川 和義(富山県立大学、立命館大学 総合科学技術研究機構)、広田 光一(電気通信大学)、井上 康之(富山県立大学)、唐山 英明(富山県立大学) - 指先で物体に触れた際の触感を提示するには,指紋を含む指腹部に生じるStick-Slip現象の変形・振動を求める必要がある.しかし従来手法では,凹凸面を触れた際の計測が難しい,凹凸面をオイルに浸す必要があった.そこで本研究では,透明な凹凸面なぞり時の指先を,テレセントリック光学系を用いた高速度カメラで撮影し,汗腺孔を画像処理で追跡することで,空気中での指腹部表面の変位分布のマーカレスでの計測を行った.その結果,Slip時に発生するわずかな減衰振動の挙動も捉えることが可能であることがわかった.
- 3D2-07
-
時系列と頭部姿勢を考慮した組み込み型光センサによる表情識別
〇中林 優樹(慶應義塾大学大学院理工学研究科)、中村 文彦(立命館大学情報理工学部)、杉本 麻樹(慶應義塾大学大学院理工学研究科) - HMD装着者の顔表情を識別する手法として,反射型光センサをHMDの顔接触部に配置し,その反射強度情報を機械学習する手法が提案されている.本研究では反射強度情報に加えて頭部姿勢情報を入力し,更にセンサ値の時間的な変化を考慮する学習モデルを使うことで表情の識別精度が上がるかを検討する.HMD内のIMUから取得する頭部姿勢情報を識別器の入力に加え,時系列学習を行うことで表情識別精度が上がるかを検証した.

- 3D2-08
-
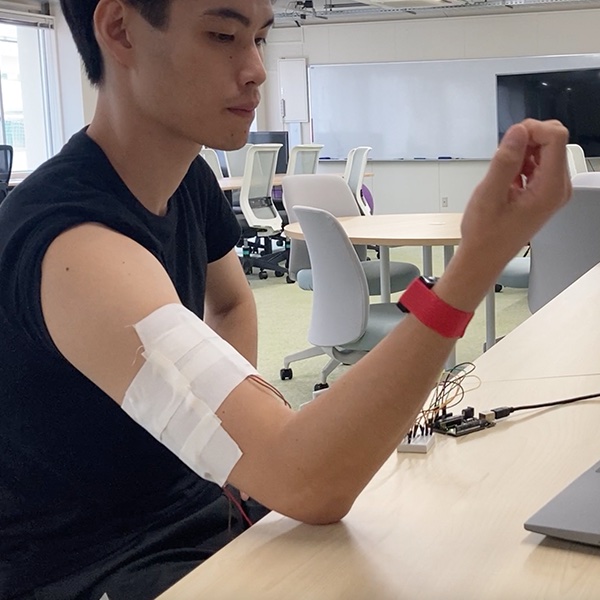
圧力センサを用いた腕の動き推定
〇佐藤 光流(湘南工科大学)、堀越 力(湘南工科大学) - 筋電センサを利用すると筋肉の弛緩状態が確認出来るため、スポーツのトレーニングでは非常に効果的なセンサである。しかし筋電は、微弱電圧の変化を計測するため、筋電センサの装着が面倒である点が課題である。本発表では、圧力センサを用いて筋肉の動きを計測する手法を提案する。そして圧力センサと実際の四肢の動きの関連性を学習することで、圧力センサのみから、手足の動きが再現可能であることを示す。
- 3D2-09
-
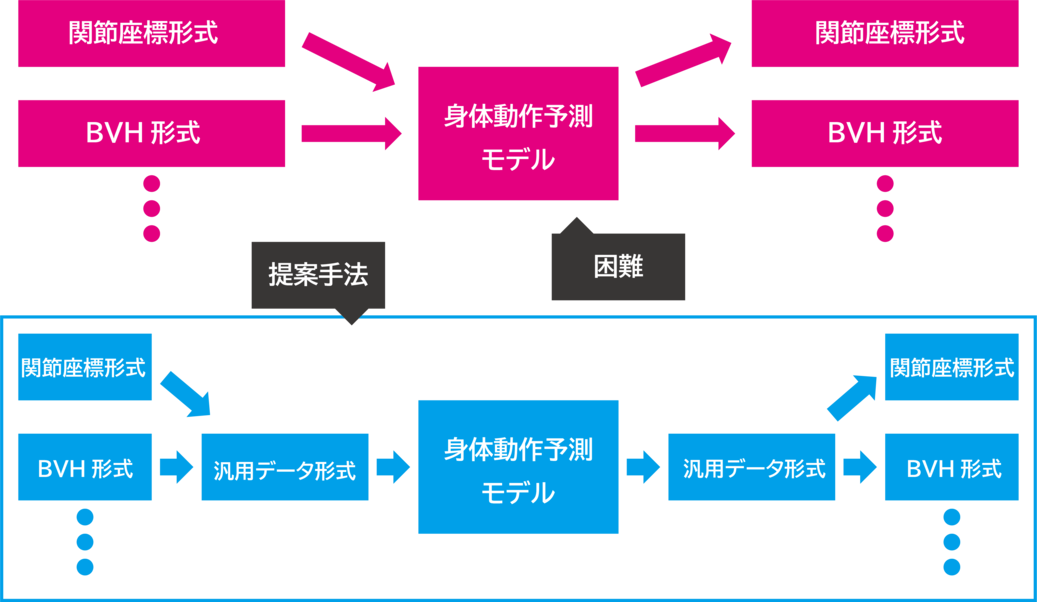
深層学習を用いた動作予測結果のアバター表示のための汎用的なデータ形式利用の検討
〇平井 龍之介(東京大学 情報理工学系研究科)、佐々木 大祐(東京大学 情報理工学系研究科)、小山 功太郎(東京大学 工学部)、上島 直登(東京大学 工学部)、許 超舜(東京大学 情報理工学系研究科)、牧野 泰才(東京大学 情報理工学系研究科)、篠田 裕之(東京大学 情報理工学系研究科) - 機械学習を用いて人物の0.5秒程度先までの動作を予測する動作予測技術において,対象の動作は一般的にモーションキャプチャ技術により3次元骨格情報を計測したものが用いられる.モーションキャプチャが人物の動作を記述する形式は製品によって異なるため,機器から直接出力されるデータを用いた場合複数種のモーションキャプチャの出力を単一の深層学習モデルで取り扱うのは難しい.本研究では,モーションキャプチャから出力されたデータを汎用的な表現に置き換えた上で動作予測を行うことで,モーションキャプチャの種類に依存しない動作予測を実現する手法について検討する.特にデータ形式の違いによる予測性能の差について検証し,動作予測に適したモデルを検討する.
- 3D2-10
-
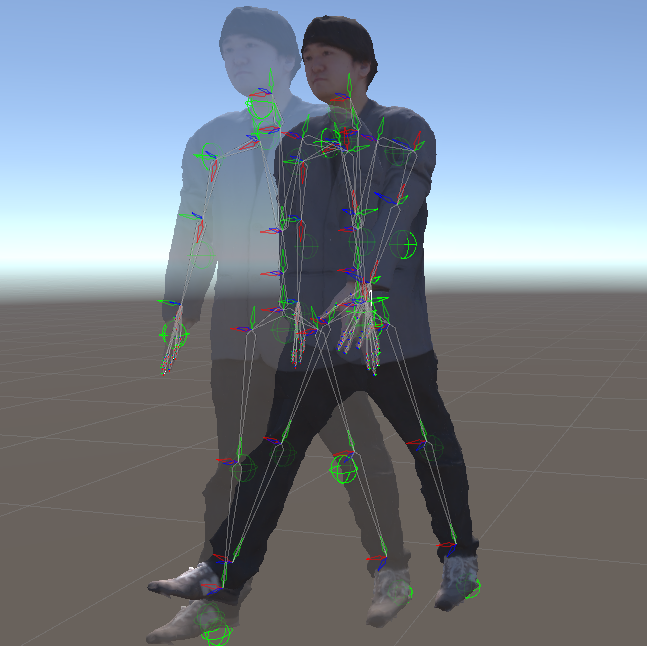
対向歩行者の動作予測結果の3次元提示による歩行動作への影響
〇佐々木 大祐(東京大学)、平井 龍之介(東京大学)、小山 功太郎(東京大学)、上島 直登(東京大学)、許 超舜(東京大学)、牧野 泰才(東京大学)、篠田 裕之(東京大学) - 本研究では,深層学習を用いて人間の身体動作を予測し,その結果をHMDを用いてリアルタイム3次元提示し活用するシステムを提案する.このシステムにおける動作予測結果提示の効果を検証するため,事前収録した歩行データを用いてリアルタイムでない実験用のシステムを構成し,未来の動作を現実の景色に重畳させた際に回避行動に変化が見られるかを確認した.結果として被験者の左右回避が早くなる傾向が見られ,この提示形式の有用性が示唆された.また,リアルタイムシステムの実装について最後に述べる.