Wednesday, 13 September
9月13日(水)
口頭発表 09:10 - 09:55 力覚・体性感覚
座長:佐瀬 一弥(東北学院大学)
- 2A1-01
-
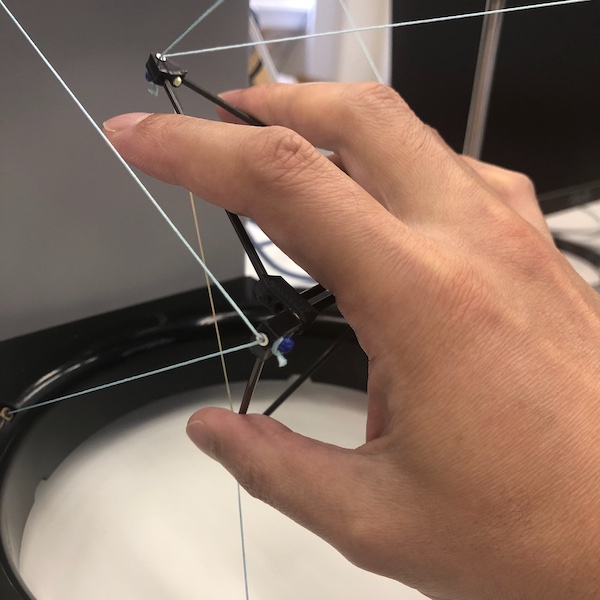
自然な把持操作を実現する高解像度力覚提示装置の実現
〇赤羽 克仁(広島工業大学) - 本研究では,自然な把持操作を可能にする7自由度ワイヤ駆動型力覚提示装置を用いて,高速な更新周波数を実現する高解像度力覚提示装置を実現した.Unity3Dにより構成された,剛体物理シミュレーションを伴うVR世界を力覚提示可能な環境にするため,力覚提示装置専用の物理シミュレータを導入し,マルチレートによる力覚レンダリングを実現し,安定性と忠実性を両立した質の高い力覚提示環境を実現した.
- 2A1-02
-
身体姿勢を周期的かつ離散的にフィードバックする装着型デバイス
〇高田 崇天(筑波大学)、ハサン モダル(筑波大学)、蜂須 拓(筑波大学) - 身体姿勢の制御は体性感覚,前庭,視覚より身体を時空間に把握し,筋骨格系に適切な出力を与えることで行われる.しかし,状況や身体の障碍によっては上記の感覚を十分に活用できず姿勢の制御が困難となる場合がある.本研究では身体の運動を支援することを目的に,身体の運動を空間的周期性をもった刺激によりフィードバックする装着型デバイスを設計・開発する.本稿では,フィードバック機構として受動的および能動的なものを含む複数の試作について報告する.
- 2A1-03
-
手指装着型デバイスを用いた遭遇型触力覚提示
〇増田 壮馬(埼玉大学)、入山 太嗣(埼玉大学)、小室 孝(埼玉大学)、中村 健二(DIC株式会社)、高橋 雅人(DIC株式会社) - 本研究ではAR によって視覚提示された物体の形状と材質感を再現するための触力覚提示手法を提案する.本手法では触感が再現されたサンプルを指の腹に正対させるデバイスを装着した上で有形物体にサンプル越しに触れ,正確な物体形状と触感を低コストで得ることができる.評価では実装したシステムがバーチャル物体の形状と材質感を意図した通りに提示できていることを確認した.

- 2A1-04
-
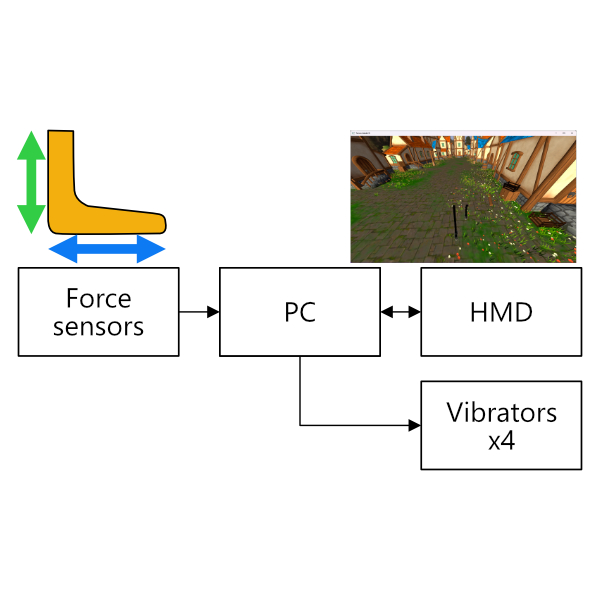
力検出と腱振動刺激を用いたVR歩行インタフェース
〇田中 叡(電気通信大学、日本学術振興会)、梶本 裕之(電気通信大学) - VRにおける歩行インタフェースは様々な方式が提案されているものの、ジョイスティックなどを用いた間接的な方式には自然さの問題、トレッドミルなどを用いた直接的な方式には簡便さの問題がある。そこで本研究ではユーザの発揮した微小な力を検出して操作を行い、同時に腱振動刺激によって歩いているような運動錯覚を提示するシステムを提案する.
- 2A1-05
-
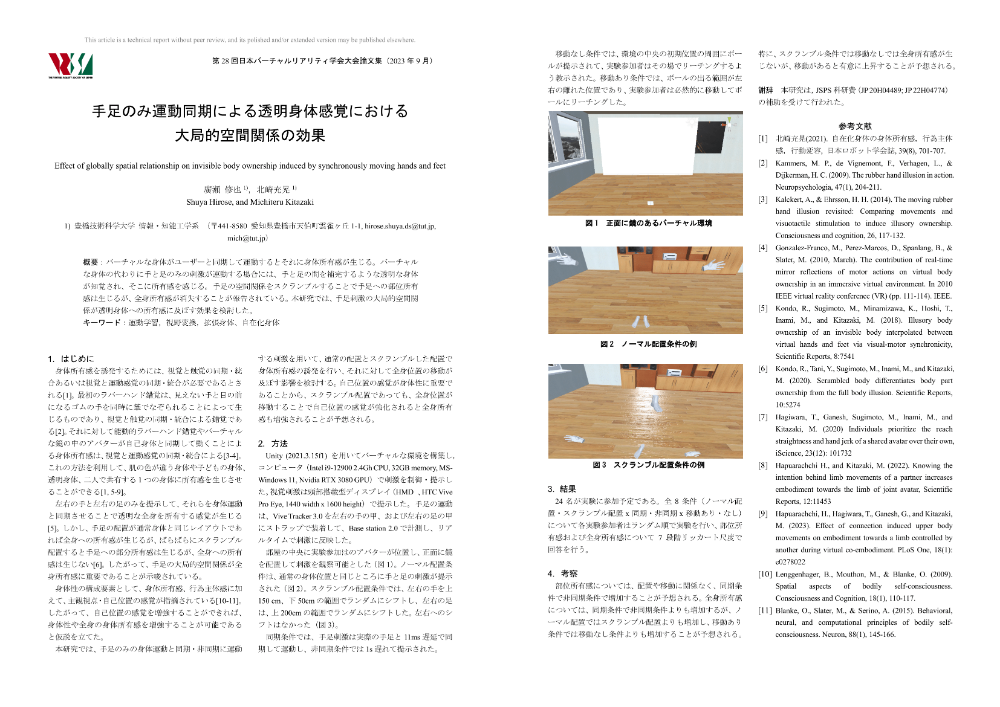
手足のみ運動同期による透明身体感覚における大局的空間関係の効果
〇廣瀬 修也(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - バーチャルな身体がユーザーと同期して運動するとそれに身体所有感が生じる。バーチャルな身体の代わりに手と足のみの刺激が連動する場合には、手と足の間を補完するような透明な身体が知覚され、そこに所有感を感じる。手足の空間関係をスクランブルすることで手足への部位所有感は生じるが、全身所有感が消失することが報告されている。本研究では、手足刺激の大局的空間関係が透明身体への所有感に及ぼす効果を検討した。
- 2A1-06
-
装着型力覚提示デバイスを用いた反力表現とその知覚特性評価
〇信川 凜佳(東京大学)、前川 和純(東京大学 先端科学技術研究センター)、門内 靖明(東京大学 先端科学技術研究センター)、稲見 昌彦(東京大学 先端科学技術研究センター) - 手に把持した道具に対して力覚を提示する装着型デバイスを提案する。このデバイスで反力を提示した際の知覚特性を評価するため、接地型力覚提示デバイスを基準刺激として、反力のばね定数を調整法により比較する実験課題を実施した。その結果、装着型デバイスでは接地型に比べて感じる力覚にばらつきがみられた。特に、基準刺激のばね定数が大きな値のときに、それと同等に感じる刺激の大きさには大小両極への偏りがみられた。
- 2A1-07
-
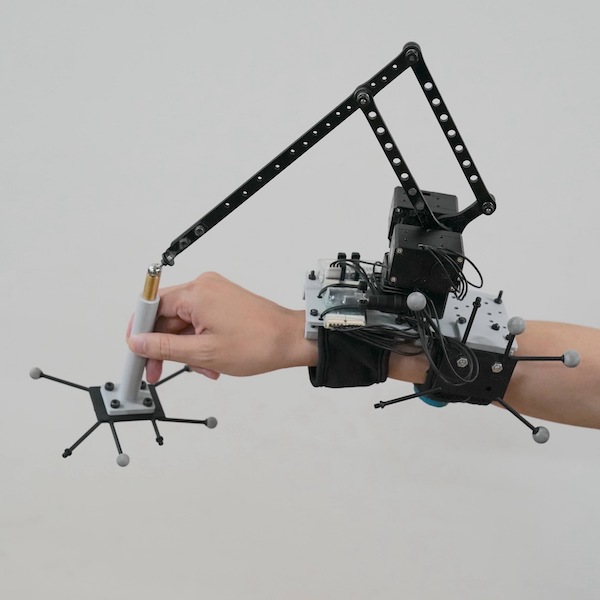
足首腱電気刺激によるリダイレクテッドウォーキングの知覚閾値拡大
〇太田 貴士(東京大学)、松本 啓吾(東京大学)、青山 一真(東京大学)、雨宮 智浩(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学) - リダイレクテッドウォーキング(RDW)において、知覚されない視覚操作の限界量であるDetection Threshold(DT)を拡大することは有限の実空間でより広いVR空間歩行を体験するために重要である。本研究では、先行研究によって足圧中心を左右に移動させられることが分かっている足首腱電気刺激を歩行に適用することで、無意識にユーザーの歩行経路が曲げられるのではないかという仮定のもと、足首腱電気刺激をRDWに適用することでDTを拡大させることを試みる。
- 2A1-08
-
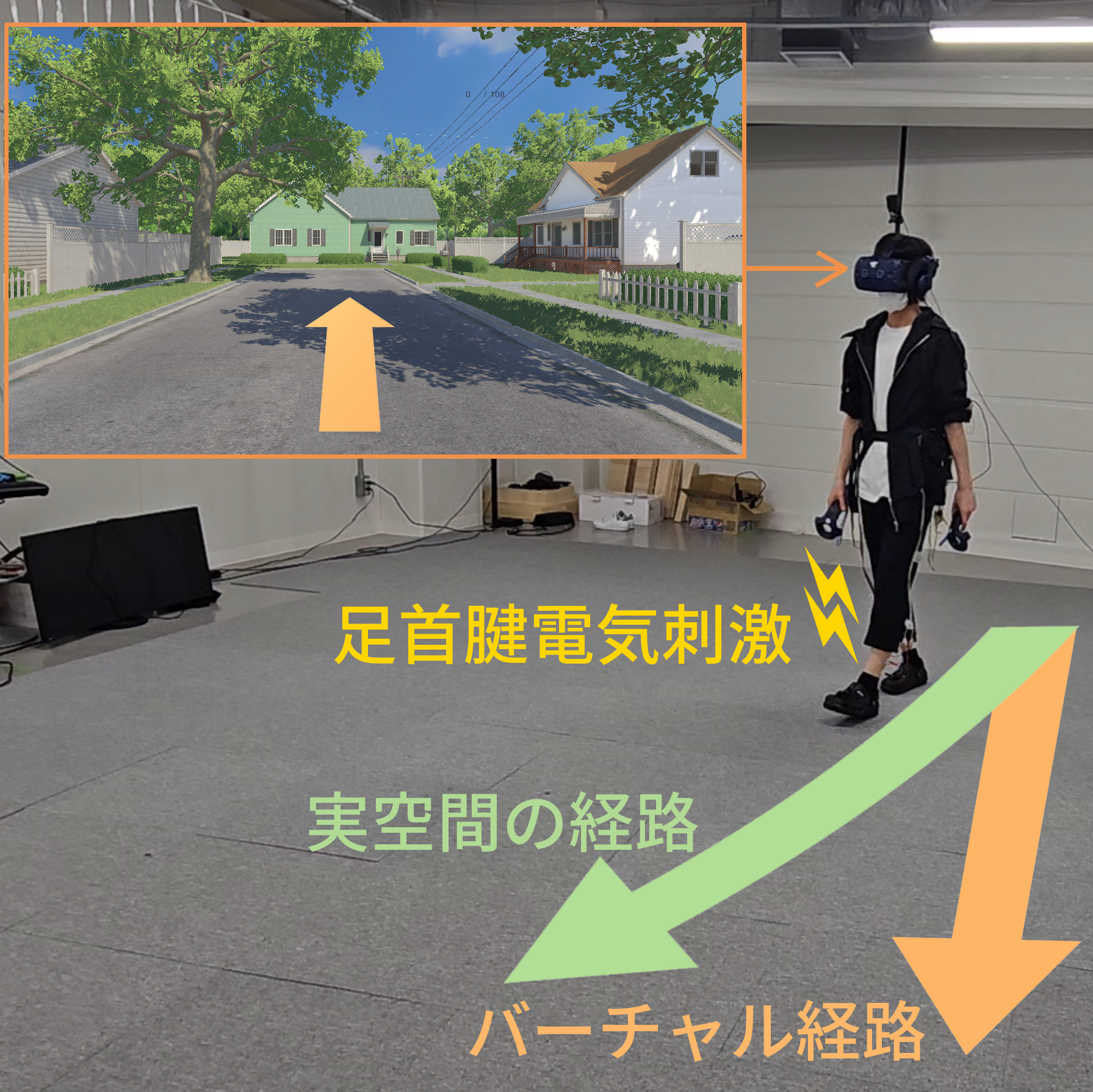
仰向け姿勢での鉛直情報の視覚刺激提示がバーチャル歩行感覚に与える効果
〇坂田 龍星(豊橋技術科学大学 情報・知能工学系)、中村 純也(豊橋技術科学大学 情報・知能工学系)、北崎 充晃(豊橋技術科学大学 情報・知能工学系) - オプティックフローと足裏振動を利用して、静止観察者にバーチャル歩行感覚を誘発できる。近年,ユーザーはヘッドマウントディスプレイを様々な姿勢で使用しつつあり,体を傾け,リクライニングする場合や寝転んだ姿勢をとる場合、視覚と前庭感覚の不整合が生じる。そのため,寝転んだ姿勢において,前庭感覚と衝突する鉛直情報を視覚刺激で補完するリダイレクションを導入し,バーチャルな歩行体験における効果を検討した。
- 2A1-09
-
異なる力覚錯覚の刺激間時間差が知覚強度に与える影響
〇納藤 拓哉(東京大学大学院)、中村 拓人(東京大学)、雨宮 智浩(東京大学) - 錯覚を利用した力覚提示は比較的提示力覚の強度が弱く,応用分野拡大のためには強度増強が求められる.牽引力錯覚と運動錯覚を同時提示すると知覚力覚が増強されることを予備的に確認した.本研究では,両錯覚の提示タイミングが知覚力覚の増強へどのような影響を与えるか調査した.

- 2A1-10
-
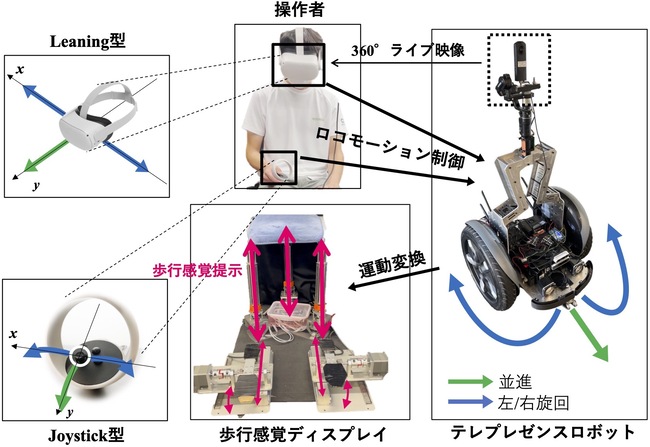
テレプレゼンスのためのLeaning型ロコモーションと歩行感覚提示の検討
〇島田 匠悟(東京都立大学大学院)、小島 優希也(東京都立大学大学院)、西内 信之(東京都立大学大学院)、池井 寧(東京大学大学院)、YEM VIBOL(筑波大学大学院) - 本研究では,テレプレゼンスロボットを使用した実環境下において,身体の傾きを利用したLeaning型と従来のJoystick型という二つのロコモーション手法の予備的な比較検証を行った.実験の結果,Leaning型ロコモーションは,使用感の快適性を向上させる効果があることが確認された.さらに,ロコモーションと同時に歩行感覚を再現することは,テレプレゼンス体験の向上に有効であることが示された.
- 2A1-11
-
水平方向加速度と路面映像による登坂路走行感覚提示
〇植松 航平(筑波大学大学院)、矢野 博明(筑波大学大学院) - 本研究では上り坂の走行感覚を表現するための要素として、水平加速度、映像遷移速度、頭の向き、視野角の4つを提案し、球面ディスプレイを搭載した電動車椅子で登坂走行映像を表示しながら水平加速度を与えることができるシステムを構築、これらの要素の影響を評価する実験を行った。 その結果、これら4つの要素はどれも登坂路走行感覚の提示に影響を及ぼす要素であることが分かった。

- 2A1-12
-
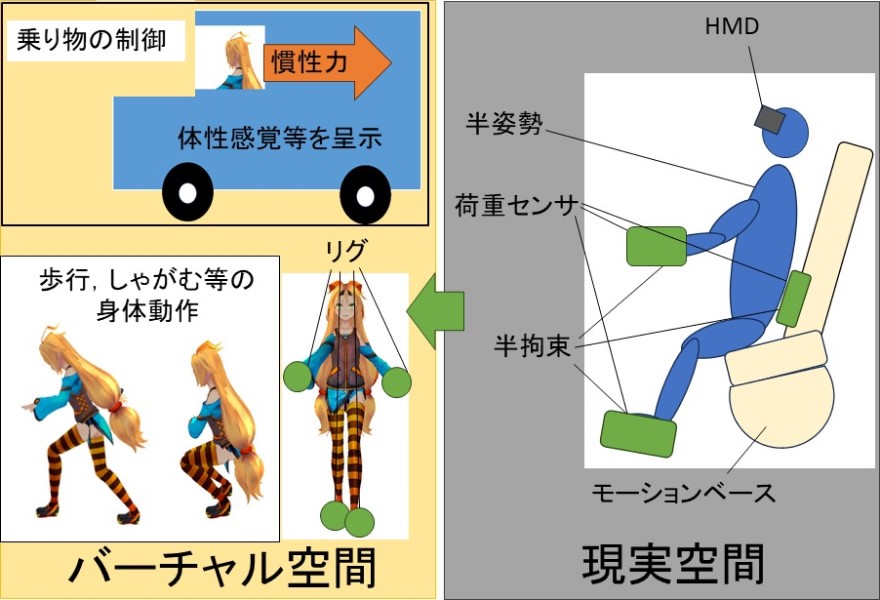
半姿勢・半拘束型フルダイブの研究
〇清水 比路(広島市立大学)、真柄 智輝(広島市立大学)、脇田 航(広島市立大学) - 本研究ではフルダイブの実現に向けた半姿勢・半拘束型デバイスを提案する.具体的には全身のあらゆる姿勢の中間の姿勢および関節自由度を多少残して拘束した状態で,身体動作やVR空間内での接触に応じたアバタ姿勢を推定することにより,VR空間内での身体動作や疑似触覚呈示等を定位置で可能にする.本論文では腰と足先を半拘束した状態において,足先を含む下半身の姿勢推定を行い,足の動作や立つ,しゃがむ動作を実現する.
- 2A1-13
-
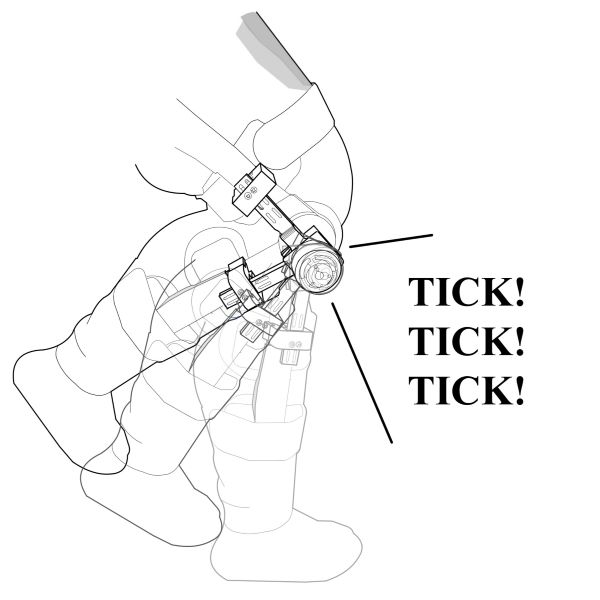
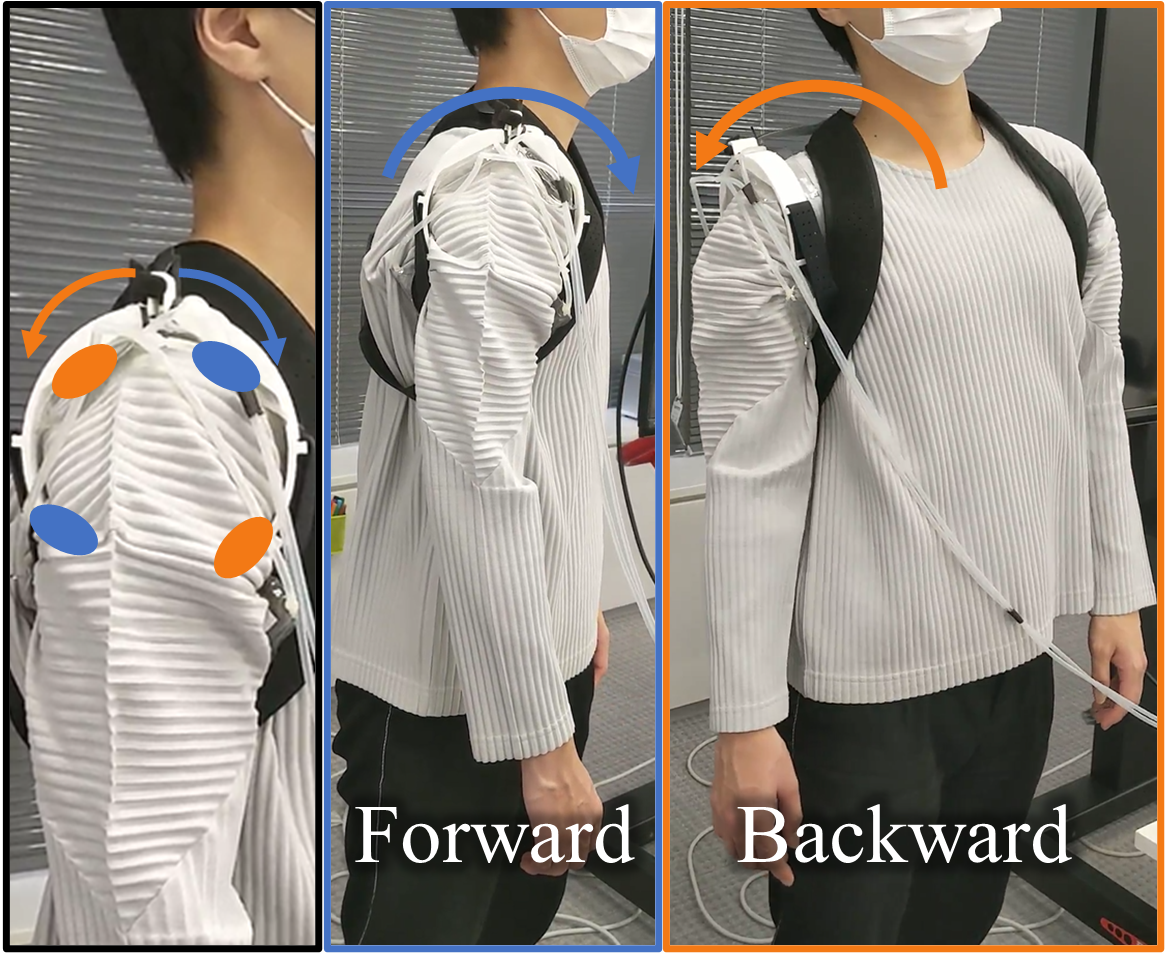
肩ハンガー反射:肩への皮膚せん断変形提示による力覚知覚
〇中村 拓人(東京大学)、葛岡 英明(東京大学) - ハンガー反射は皮膚せん断変形を提示することで力覚を知覚させる錯覚現象であり,身体の複数部位での発生が確認されている.しかし,上肢では手首と肘でのみ発生が確認されていたが,肩では未検証であった.そこで本研究では,肩への皮膚せん断変形提示によって,肩へハンガー反射を適用した.実験の結果,他の部位と類似した回転方向の力覚を知覚することを確認した.
- 2A1-14
-
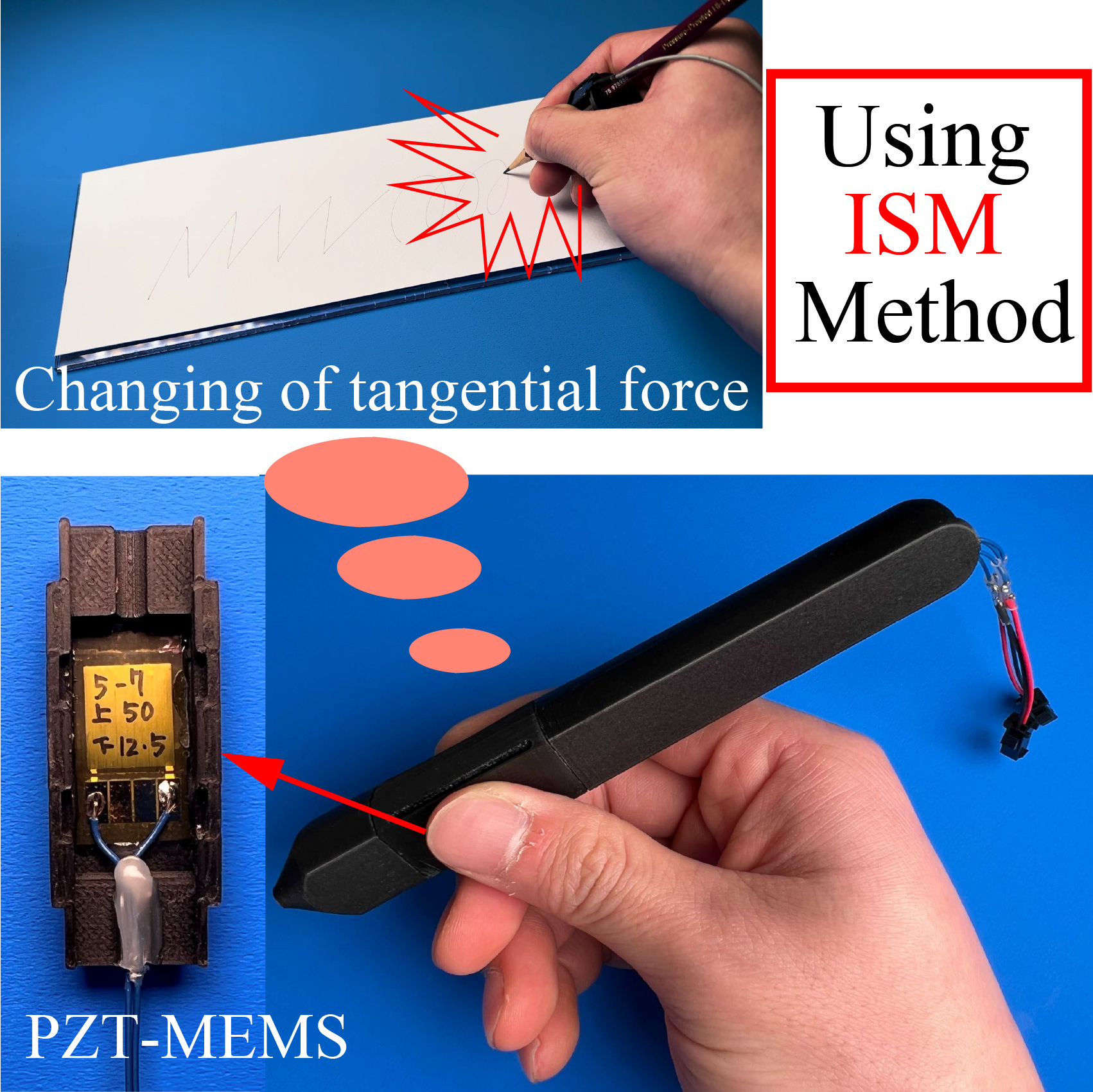
高周波振動の知覚インテンシティ再現による筆記体感の疑似力覚提示
〇和賀 正宗(東北大学)、松原 亨(東北大学)、昆陽 雅司(東北大学)、竹下 俊弘(産業技術総合研究所)、竹井 裕介(産業技術総合研究所)、小林 健(産業技術総合研究所)、田所 諭(東北大学) - 本研究では高周波振動の知覚インテンシティを再現することにより,筆記動作時の接線力の疑似力覚提示を試みる.速度と荷重を調整可能な筆記装置を製作し,異なる荷重で鉛筆を筆記したときの接線力と鉛筆を伝播する振動を計測する.提案手法で提示した振動刺激により接線力の大きさを認識できるか順位法に基づき被検者実験を行う.実験結果を測定により導出した法線力と接線力の関係と比較することで疑似力覚提示の効果を考察する.
- 2A1-15
-
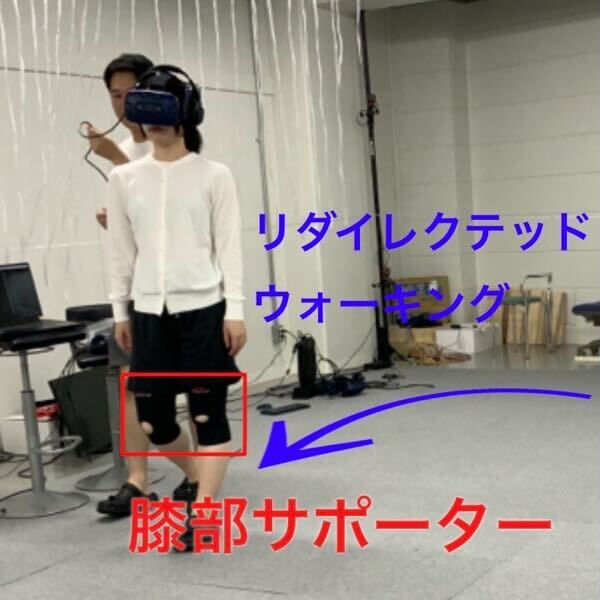
膝部サポーターの装着によるリダイレクテッドウォーキングの操作知覚への影響
〇福井 岳(東京大学)、中村 拓人(東京大学)、松本 啓吾(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学) - VR空間内での歩行移動技術としてリダイレクテッドウォーキングと呼ばれる手法が知られており,没入感低下やVR酔い防止のため,操作の知覚閾値の拡大が必要とされている.先行研究では,膝への特定のデバイスの装着により知覚閾値が拡大することが示されたが,装着による歩きにくさや歩行の違和感が課題であった.本研究では,歩きやすく違和感の小さい膝部サポーターの装着によっても知覚閾値の拡大が可能かどうか検証する.