Sept. 13 2022
9月13日(火)
このプログラム速報版は8月26日暫定版です。座長は掲載していません。
投稿原稿PDFは9/9(金)16:00公開予定のWeb予稿集に掲載されます.
(原稿投稿時にプログラム速報版へのサムネと発表要旨の公開不可を選択された方はWeb予稿集にのみ掲載されます)
(Web予稿集公開時に, プログラム速報版をWeb予稿集に差し替えます)
研究委員会OS9:30-10:50
OS_複合現実感研究委員会「MR・AR・XRってなんですか?拡張する用語問題」
- 2A1
- MR・AR・XRってなんですか?拡張する用語問題
竹村 治雄(大阪大学)、蔵田 武志(産業技術総合研究所)、森 真吾(デロイトトーマツコンサルティング)、〇北原 格(筑波大学) - 日常生活の中でVR、AR、MR、XRといった複合現実感研究会に関係する用語を目にする機会が増えてきた。その一方で、それらの使われ方が産業・研究・教育などの分野間で異なる例が見受けられる。複合現実感研究会では、専門用語の表現整備により正確な情報発信を促進することは学会の重要な存在意義と考え、産官学の各立場から専門用語の使われ方について、講演およびパネル討論を企画する。

口頭発表9:30-10:50
触覚1
- 2B1-1
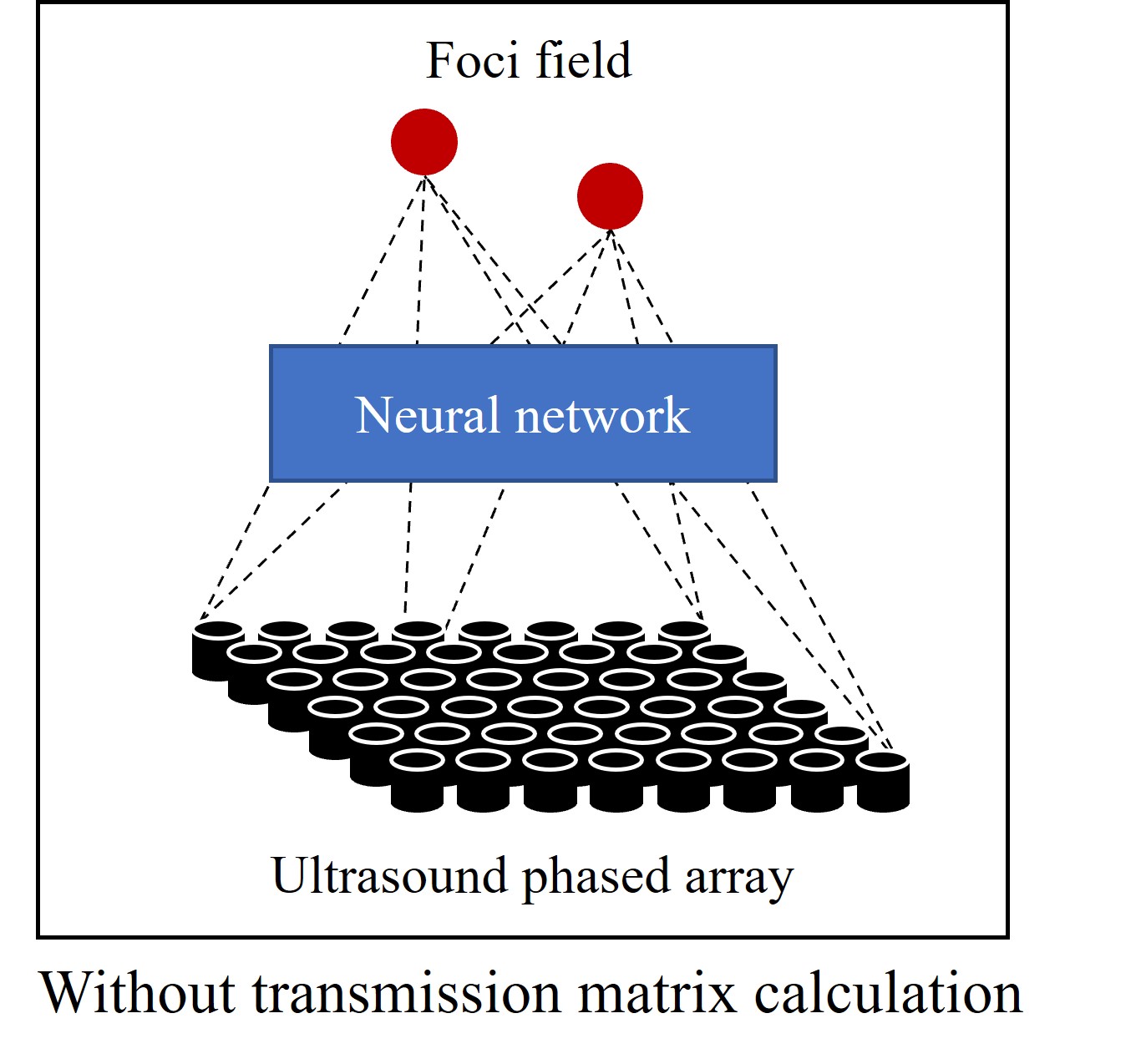
- Sound Pressure Field Reconstruction for Airborne Ultrasound Tactile Display by Neural Network
〇陳 剣宇(東京大学)、鈴木 颯(東京大学)、藤原 正浩(東京大学)、牧野 泰才(東京大学)、篠田 裕之(東京大学) - How to generate a foci sound field quickly for airborne ultrasound tactile display has been widely studied. This time, we propose a neural network model which can generate a specific foci field in lower computational cost.
- 2B1-2
- スマートフォンで利用可能な高臨場感振動変換法を用いた体感付き動画の提案
〇星 裕也(東北大学)、昆陽 雅司(東北大学)、田所 諭(東北大学) - 近年スマートフォンに搭載されているLRA型振動子では,周波数応答が限られるため任意の音響信号をそのまま振動刺激として提示することは難しい.これまで我々が提案してきた高周波振動の感覚等価変換手法と低周波振動感の代替提示法を活用することで,スマートフォン上で任意の音響信号を元にした高臨場感の振動提示が可能となった.本稿では本機能を活用した体感振動付きの動画視聴アプリを開発し,その有用性を検証する.

- 2B1-3
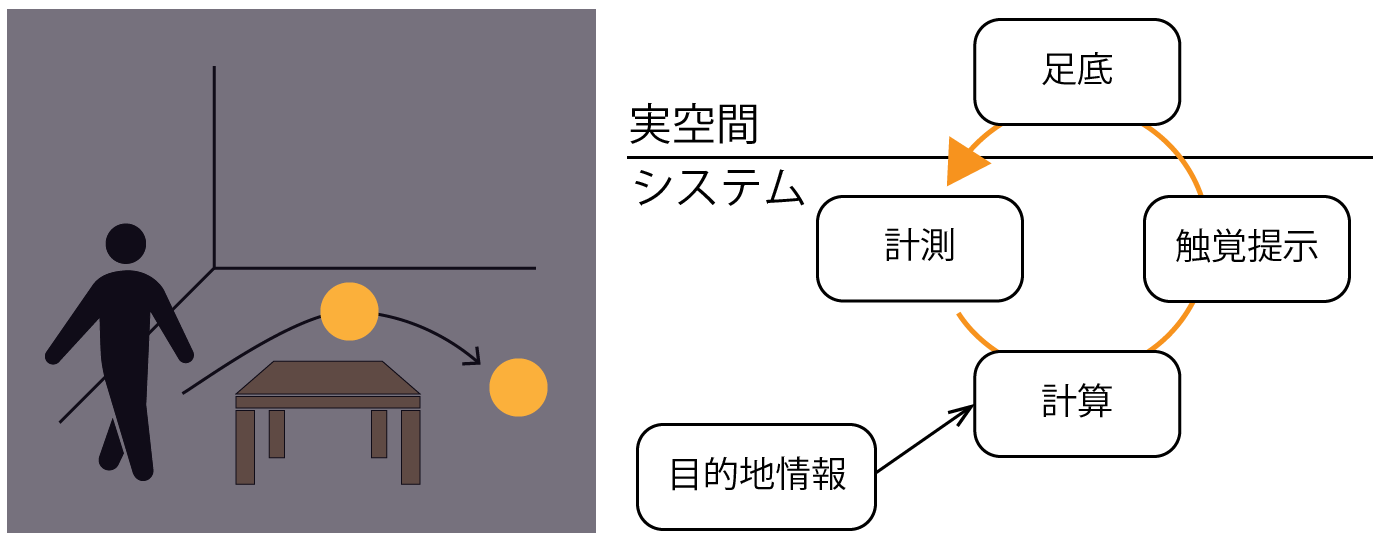
- 足底触覚を用いた床型歩行誘導システム構築に向けた基礎検討
岡﨑 菜琳(東京大学)、〇吉田 貴寿(東京大学)、Balandra Alfonso(東京大学)、柏野 善大(東京大学)、稲見 昌彦(東京大学) - 足底はほぼ常に床や地面といった外部環境に接しており、これらの環境がアクティブに作用することで、今よりも多様な情報を受け取ることができる可能性がある。本研究では、この関係性を利用した歩行誘導システムを提案する。まず人間の足底触覚による空間知覚特性を調べた。実験で得られた知覚特性に基づき、システムの設計指針を提示した。最後に、環境型ディスプレイにより実現される、新たな身体と空間の関係性の展望を述べる。
- 2B1-4
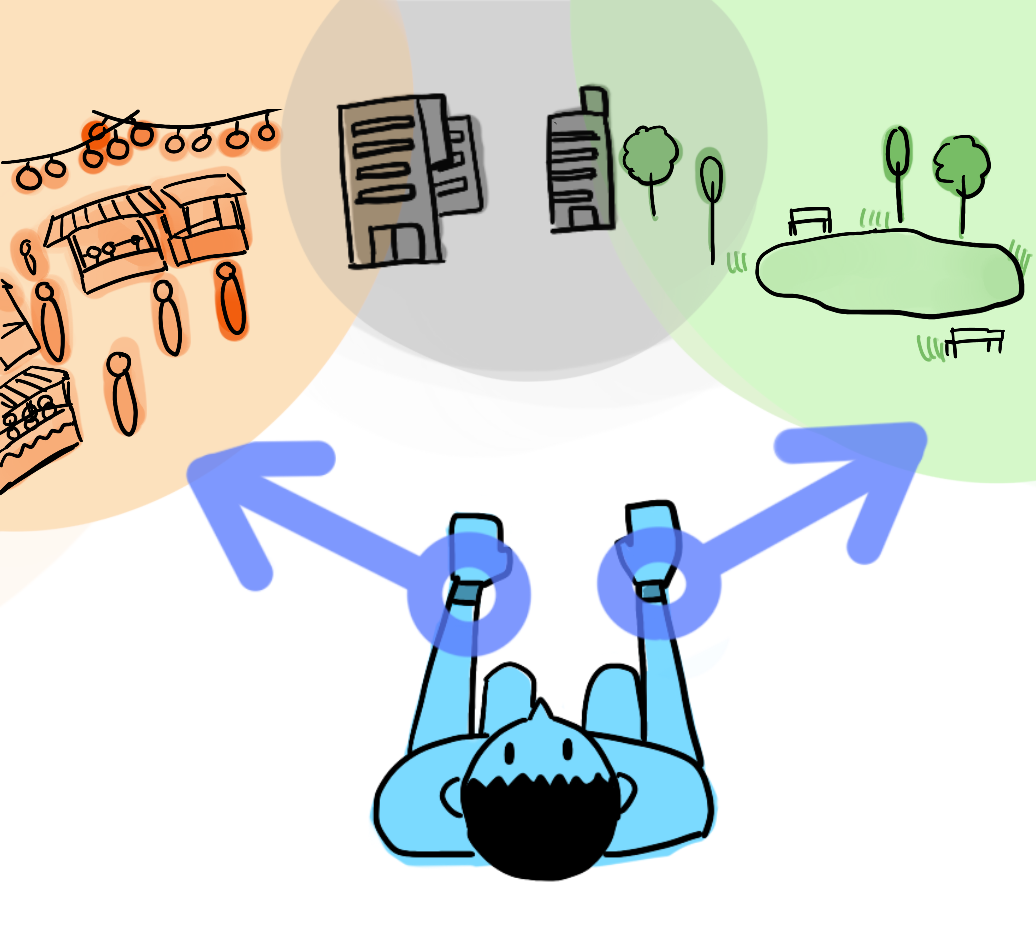
- ユーザの嗜好を反映した面的ナビゲーションのための多義的解釈が可能な触覚提示デザインの基礎検討
〇千嶋 広恵(慶應義塾大学大学院メディアデザイン研究科)、前田 智祐(慶應義塾大学大学院メディアデザイン研究科、豊田中央研究所)、鞠 玉蘭(慶應義塾大学大学院メディアデザイン研究科)、堺 浩之(豊田中央研究所)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - ナビゲーションは、目的地までの最短経路や道順案内を線で提案するものである。しかし、最適なルートを提案する線のナビゲーションは、歩行の自由度が低い。そこで目的地へ向かう経路を、最短ルートの線ではなく、より広い範囲であるエリアとして方向提示を行うことで、ユーザにルートの選択権を与える面のナビゲーションを目指す。本研究では、触覚刺激を用いた面のナビゲーションデザインの検討を行う。
- 2B1-5
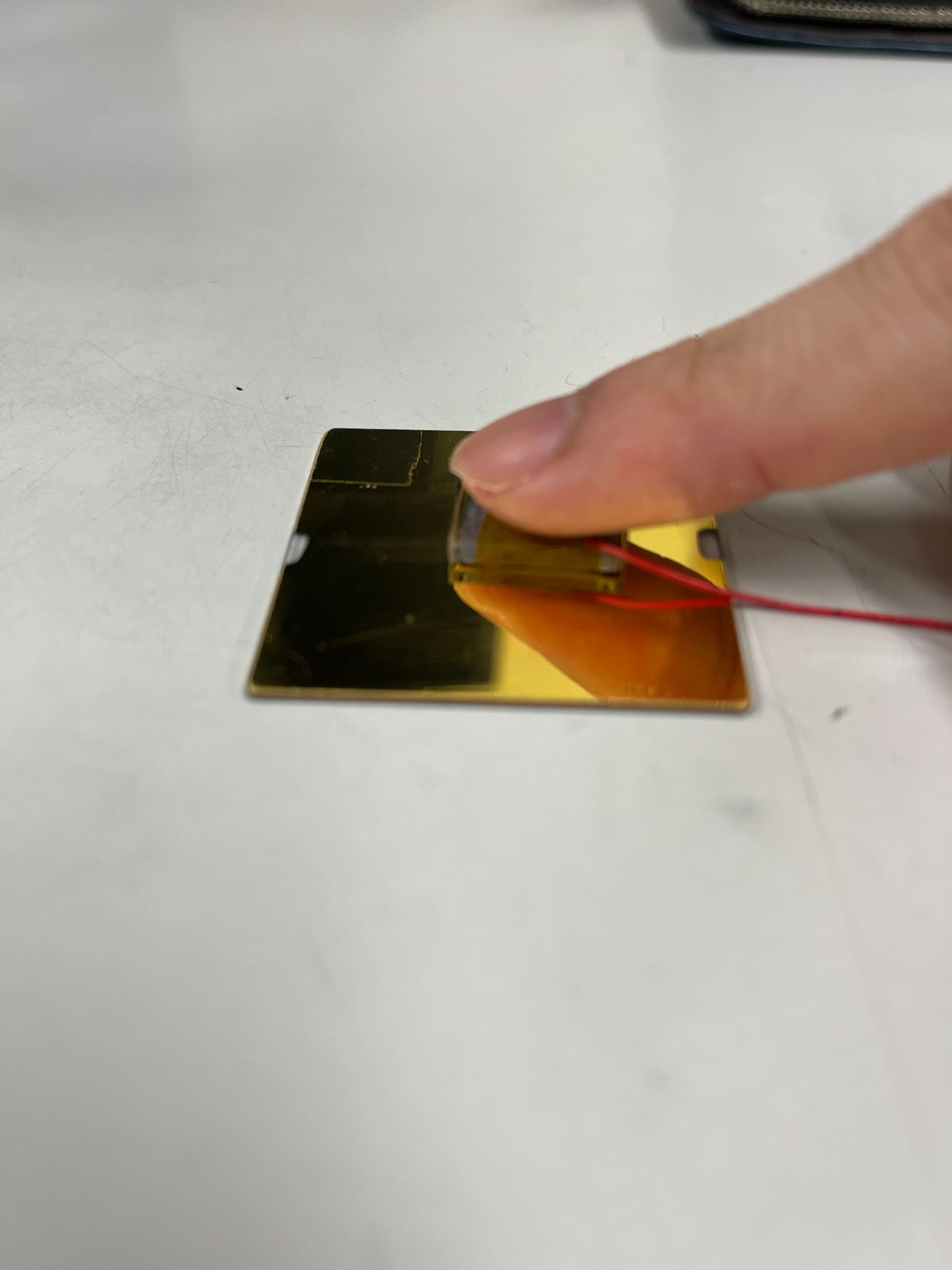
- 絶縁膜薄膜化による静電触覚ディスプレイの印加電圧低減と圧電ディスプレイとの複合化
〇髙橋 駿(新潟大学大学院)、寒川 雅之(新潟大学大学院) - 本研究室ではカンチレバー型の触覚センサを用いて物体の触感をデータ化し、触覚ディスプレイ上で触感を再現するシステムを提案している。静電触覚ディスプレイは提示に必要な印加電圧が高いことが難点であったが、ポリマー薄膜、アルミナ薄膜などを用いることで50V以下に抑えることができた。また、圧電ディスプレイとの複合化でよりリアルな触覚の提示を目指した。
口頭発表9:30-10:50
身体性認知4
- 2C1-1
- 結合身体における自分が操作する腕に対する所有感の左優位性
〇HAPUARACHCHI HARIN(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - 2人のユーザーが1つのアバターの左と右の半身を操作する結合身体システムを構築し、自分が操作する腕と相手が操作する腕の身体性(身体所有感、行為主体感、脅威刺激に対する皮膚電位反応)を計測した。その結果、自分が操作する腕の身体性が相手の操作する腕よりも高く、自分が操作する腕では左腕が右腕よりも身体所有感が強かった。これは、身体性認知における右半球皮質の優位性が左腕の身体所有感を高めたためと推察される。

- 2C1-2
- 複数身体における所有感錯覚とアフォーダンス知覚の関係
〇近藤 亮太(慶應義塾大学)、杉本 麻樹(慶應義塾大学) - 複数の身体にも所有感が誘発されるが,それが身体間で切り替わっているのか,同時に生じているかは不明である。所有感が複数の身体に同時に生じている場合,開口通り抜けにおけるアフォーダンス知覚が変化すると考えた。本研究では,参加者の運動に同期して動く2体のアバタに対して所有感が誘発可能か,それによってアフォーダンス知覚が変化するか調べた。
- 2C1-3
- 身体の分裂が自己位置知覚に及ぼす効果
〇近藤 亮太(慶應義塾大学)、杉本 麻樹(慶應義塾大学) - VRを用いて自己身体を2つにした研究では,自分が異なる2地点にいるように感じる。しかし,その感覚は弱く主観的な報告のみである。これは,観察者の身体と提示される2つの身体の運動や触覚刺激の対応関係が1対2になり,注意が身体間で切り替わるためだと考えた。本研究では,1つの身体を左右に分裂させることで,参加者の身体と提示される身体の1対1の対応関係を維持したまま,自己位置を拡張できるか調べた。

- 2C1-4
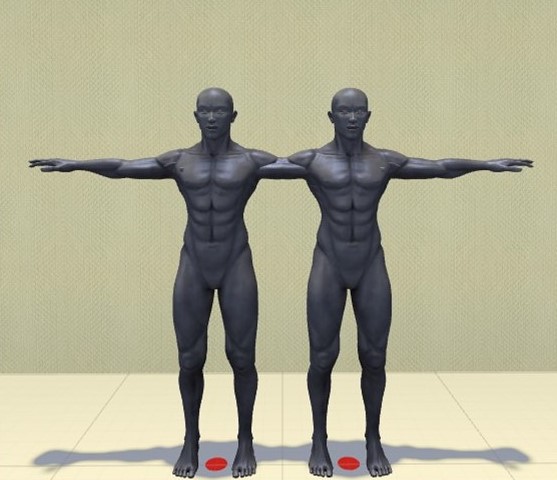
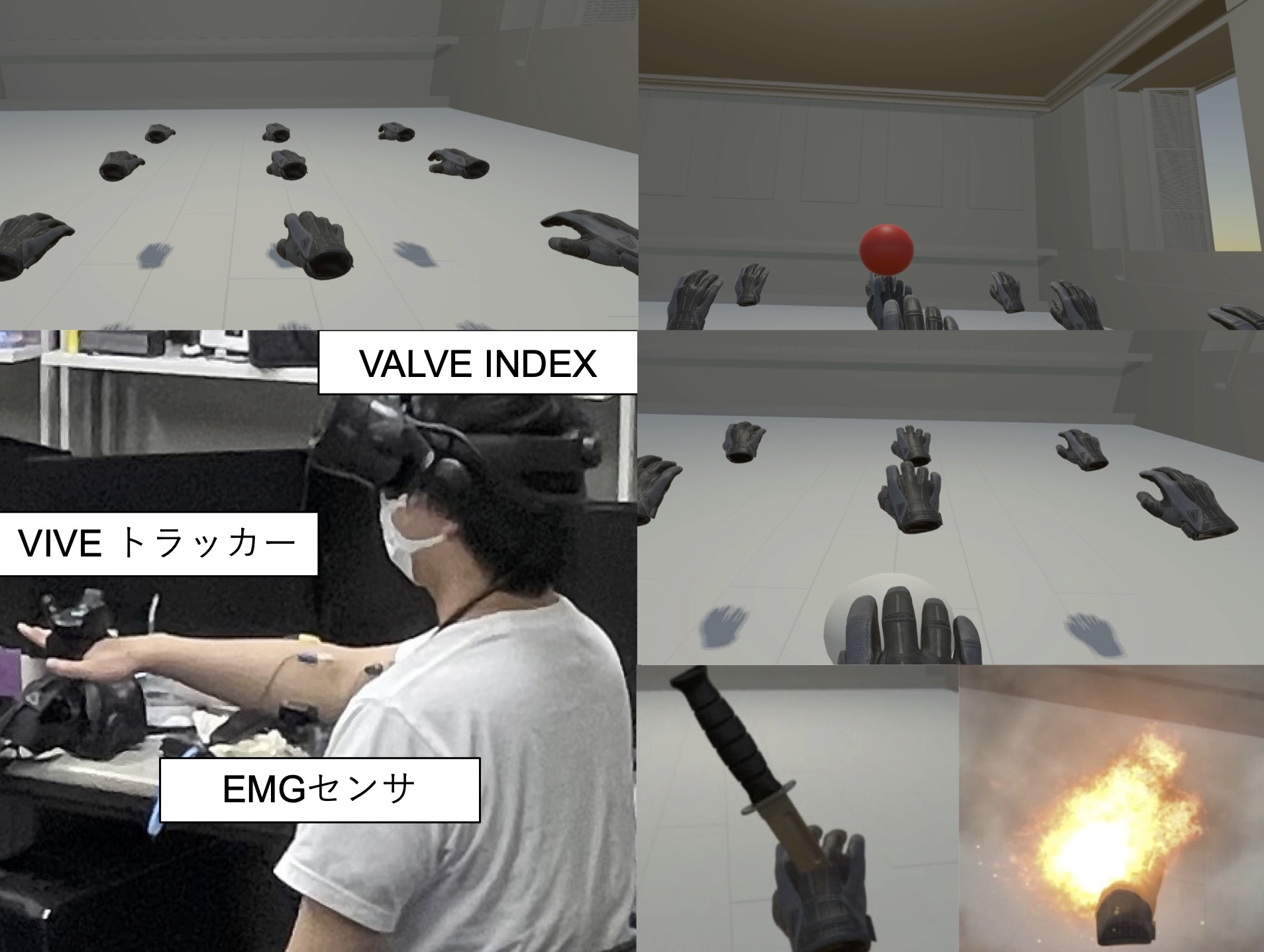
- 多数の手との運動同期における身体認知の検証
〇増山 由輝(慶應義塾大学)、福岡 正彬(慶應義塾大学)、Teo Theophilus(慶應義塾大学)、近藤 亮太(慶應義塾大学)、杉本 麻樹(慶應義塾大学) - 本研究では,バーチャル環境上で多数の手を同期して動かした際に,身体所有感と行為主体感がどのように変化するか調べた.実験参加者はEMGセンサを腕に装着し,VR環境に提示された1本の手または9本の手を用いて,2分30秒間のリーチングタスクを行った.タスク後に脅威刺激が与えられ,その時のEMGを身体所有感の客観的指標として計測した.最後にアンケートを実施し,主観的な身体所有感と行為主体感の強さを調べた.
- 2C1-5
- 同じ身体部位における複数身体表現
〇松宮 一道(東北大学)
口頭発表9:30-10:50
ユーザインタフェース1
- 2D1-1
- VR空間におけるダイナミックテクスチャと動作同期による物体選択法
〇程 清滔(立命館大学)、野間 春生(立命館大学)、安藤 潤人(立命館大学) - 我々は物体のテクスチャの変化とユーザーの手の動きの同期を利用した、VR空間における物体選択手法を提案する。ここでは方向、速度、位相が異なるダイナミックテクスチャーを複数の物体に貼り付け、ユーザーは選択したい対象物のテクスチャの動きに合わせて手先を動かすことで対象物を選択できる。 比較実験により、提案手法は従来のレーザーポインティング方式に比べて遮蔽された物体の選択に優勢があることを確認した。
- 2D1-2
- NN内挿補間を用いた低サンプリングレート関節点の高サンプリングレート化
〇飯田 航平(芝浦工業大学)、清水 創太(芝浦工業大学)、奥野 哲史(芝浦工業大学) - 本講演では,来たるべきメタバースの時代に3Dアバターを滑らかに動かすことを目標として,OpenPoseのような比較的安価ではあるが,サンプリングレートの低いモーションキャプチャデータをNN内挿補間によってリアルタイムで高レート化する手法について述べる.
- 2D1-3
- 商品棚を用いないVRショッピングシステムのユーザビリティと購買者への影響に関する研究
〇久松 郁美(北海道大学 大学院情報科学院)、坂本 雄児(北海道大学 大学院情報科学研究院) - 従来のVRショッピングシステムに関する研究の多くは実店舗を模したシステムを対象としていた。本研究では、商品棚を用いず実店舗を模していないVRショッピングシステムを作成し、被験者実験を通してそのユーザビリティと購買行動の調査を実施した。その結果、商品棚を用いないシステムは実店舗を模したシステムと比較し、目的商品の発見にかかる時間が短い傾向がある一方で、ユーザ体験の楽しさは劣る傾向があると分かった。

- 2D1-4
- 非視認状態でのタッチパネル利用を想定した新しいスワイプ操作インタフェース
〇加藤 馨(名古屋工業大学)、舟橋 健司(名古屋工業大学) - 視覚障害者など画面を注視出来ない非視認状態でのタッチパネル利用は困難である。そこで触れていても非操作状態であることを許容することで、画面を見ずに操作可能な逆タップと呼ぶインタフェースを提案している。本研究では新たにスワイプ操作に相当する新たな操作方法を提案する。画面レイアウトに依存しない操作方法で、画面上のボタン数が限られる逆タップインタフェースを補助する。

- 2D1-5
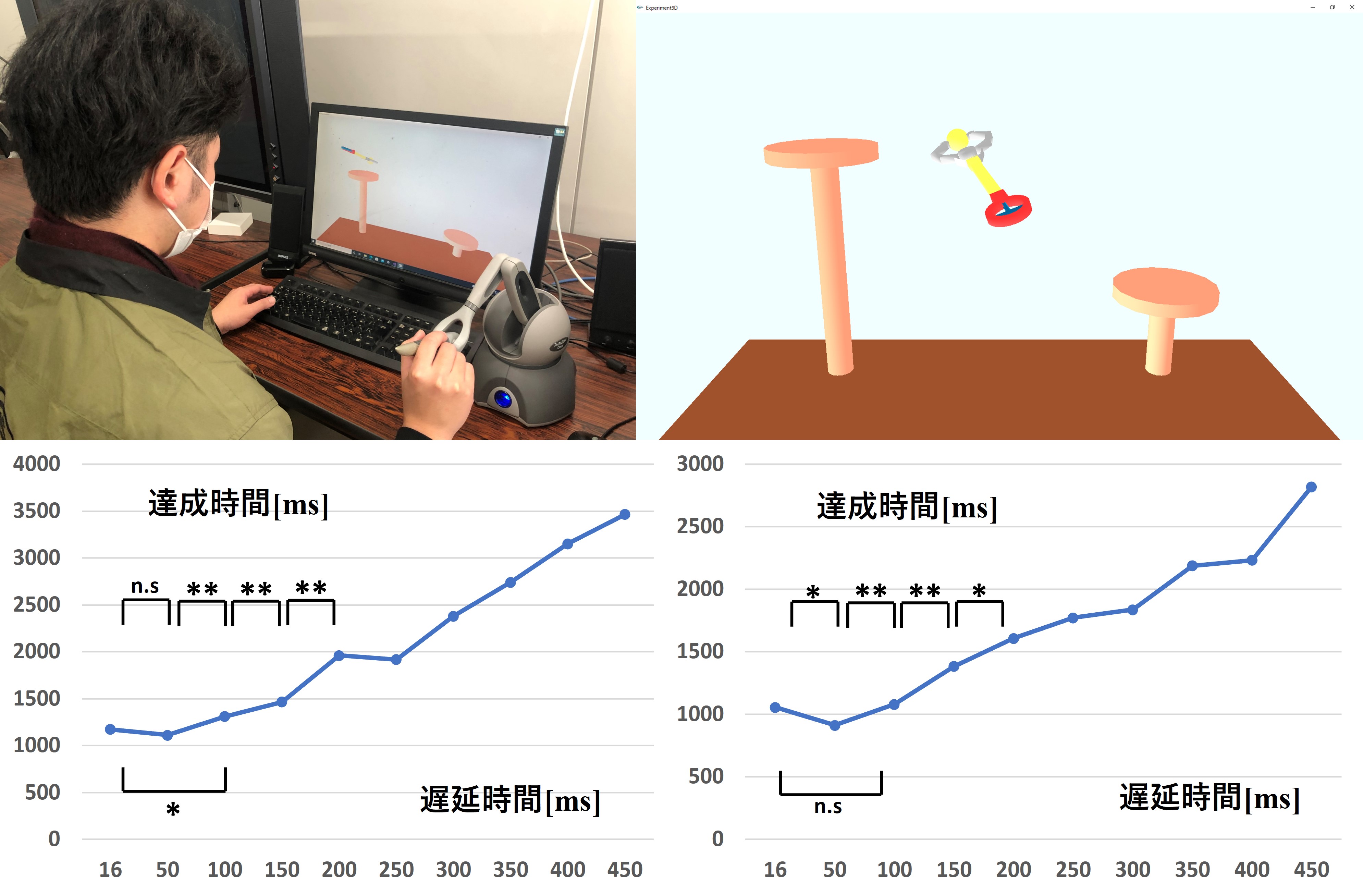
- 道具操作におけるタスクの違いとわずかな遅延の積極的影響に関する調査
〇三輪 陽雲(名古屋工業大学)、舟橋 健司(名古屋工業大学)、谷田 公二(近畿大学)、水野 慎士(愛知工業大学) - 当研究室のこれまでの実験で、道具操作におけるわずかな遅延が操作成績を向上させることが示唆された。ところが、見栄えやタスクが若干異なる実験では好影響は確認できなかった。そこで本研究では、わずかな遅延により成績が向上する要件を調査した。見栄えは変更したままタスクを調整することで、改めて成績向上が示唆される結果を得た。操作タスクの難易度の影響が確認できた。
口頭発表9:30-10:50
視覚
- 2E1-1
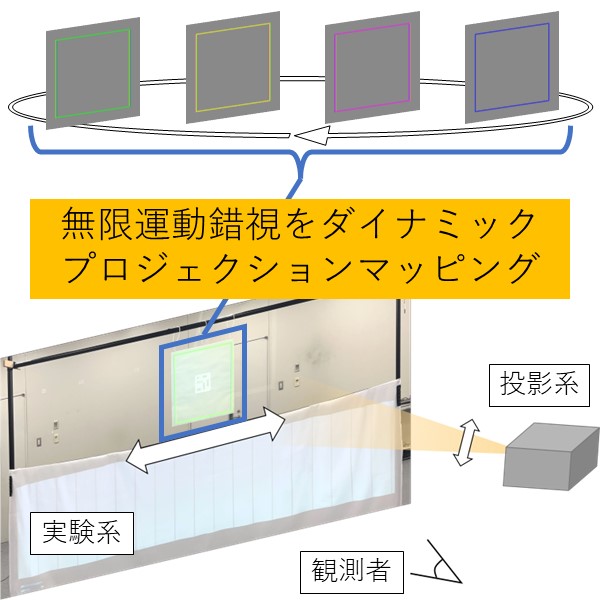
- 無限運動錯視を誘起する映像が運動する状況を提示する投影系の開発
〇新井 好明(群馬大学)、奥 寛雅(群馬大学) - 移動体に対して無限運動錯視を誘起する映像を追従しながら重畳させた場合,移動体の移動方向と運動錯視の運動方向とが相互に作用すると予想され観察者にどのように知覚されるのかは不明である.本発表では,この計測を実現するための無限運動錯視をダイナミックプロジェクションマッピングする手法の開発および実験システム系の試作の内容について報告する.
- 2E1-2
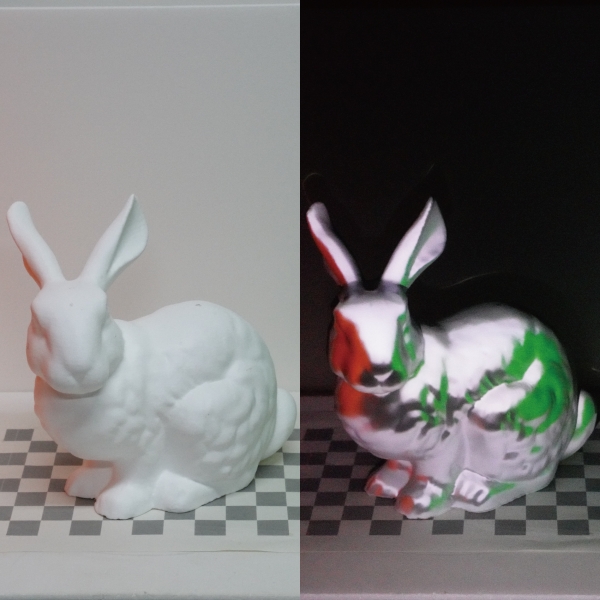
- パストレーシングを用いたプロジェクションマッピングのノイズ評価指標に関する検討
〇勝部 寛也(東京工業大学)、渡辺 義浩(東京工業大学) - パストレーシングで描画したノイズの多い画像を,高速プロジェクタで投影することで,写実的なダイナミックプロジェクションマッピングが可能である.これは,ノイズが知覚上で積分されることで,少なく見えることによる.しかし,知覚的なノイズは十分に消えておらず,加えて,評価は定性的に行われている.本稿では今後の品質向上に向け、どのような客観評価指標が本手法の知覚的なノイズの評価に適するかを検討する.
- 2E1-3
- 注視点と視線の交点の深度差を用いたVR空間におけるユーザの言語負荷の推定
〇シルム ヨハネス(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、磯山 直也(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - 視線計測が可能なVR用ヘッドマウントディスプレイが普及し,VRを体験中の視線データを用いてユーザの内部状態を推定する研究が盛んになっている.本研究では,注視点と視線の交点の深度差を用いてVRを体験中のユーザの言語負荷の推定を試みた.具体的には,VRを体験中に難易度の異なる音声を聞き取らせ,両眼の視線の交点が注視対象の物体表面からどの程度前後にずれるか (focus offset) を調査した.その結果,音声の主観的難易度と瞳孔径や focus offset の間に相関は見られなかった.しかし,一部の条件間に有意差が確認され,瞳孔径に加えて focus offset が実際の言語負荷と何らかの関係があることが示唆された.

- 2E1-4
- シースルー型HMDを用いた視線推定に基づく興味の取得
〇シュレスタ アロク(大阪工業大学)、大井 翔(大阪工業大学) - 本研究ではシースルー型HMDに内蔵されたアイトラッカーを使った視線推定に基づいて複数の広告中から興味のあるものを取得する手法を検討する.」また,取得する広告は意識的な興味によって得られたもので,今回は無意識的に興味を持っている広告の提案手法についても検討する.
- 2E1-5
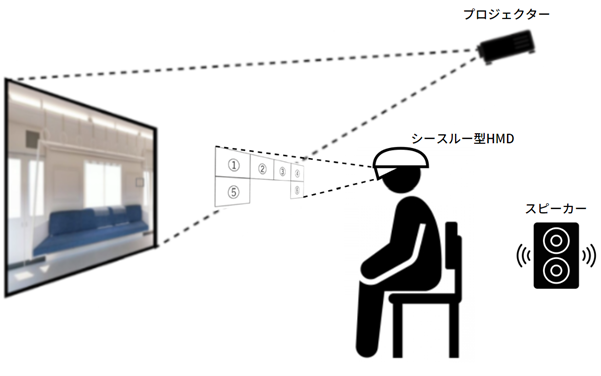
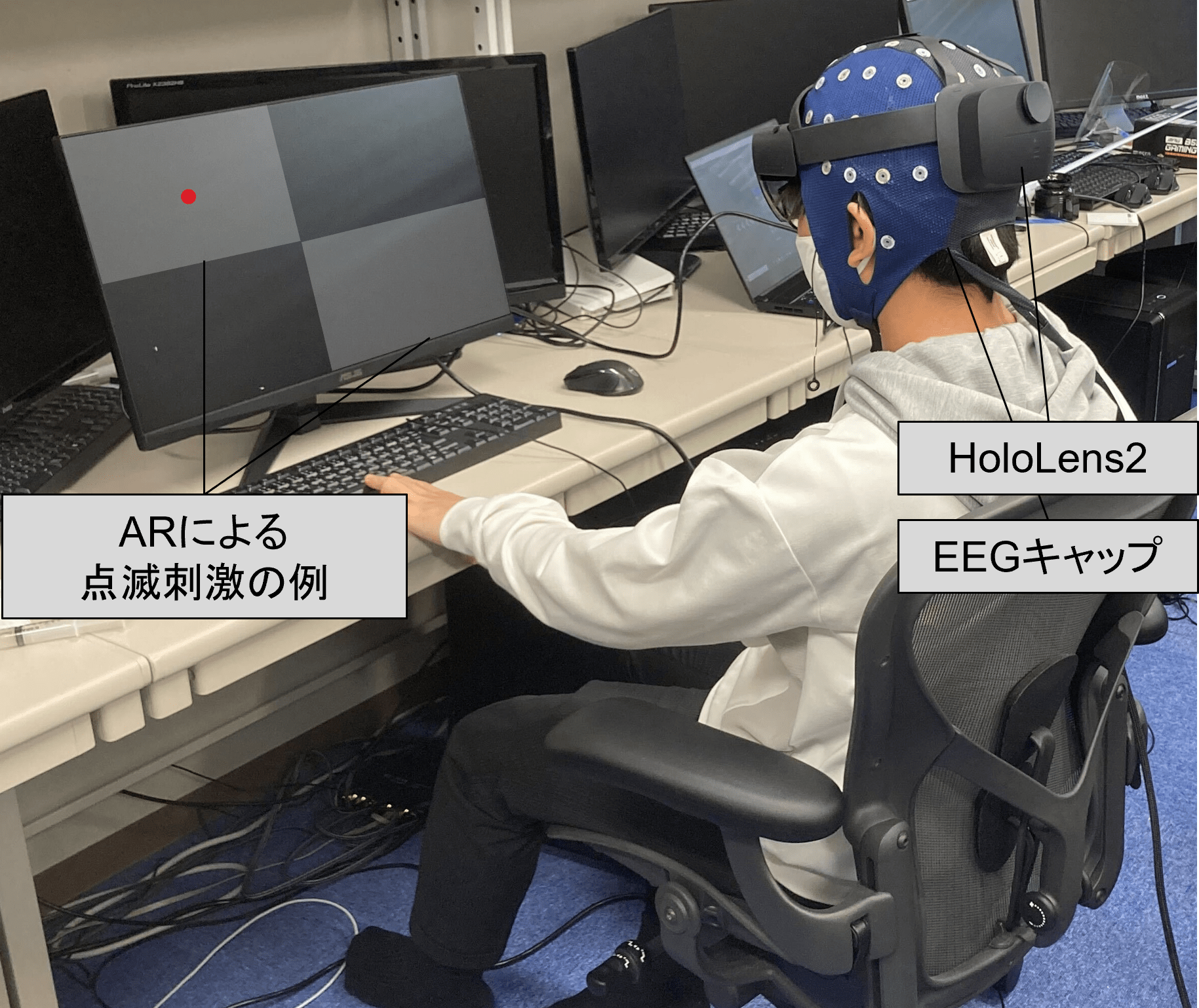
- 光学透過型 HMD を用いた AR-SSVEP における背景映像と奥行きの影響の検討
〇坪地 航己(慶應義塾大学)、小林 明美(慶應義塾大学、NTTコミュニケーション科学基礎研究所)、正井 克俊(慶應義塾大学、NTTコミュニケーション科学基礎研究所)、杉本 麻樹(慶應義塾大学)、木村 聡貴(慶應義塾大学、NTTコミュニケーション科学基礎研究所) - 定常状態視覚誘発電位(SSVEP)を計測することで,人間の注視の他に注意を解析することが行なわれている.AR環境の点滅刺激を注視することによって,注視領域の刺激に対応したSSVEPを計測することが可能である.光学透過型のHMDを用いた点滅刺激を通して,現実世界で提示される映像を注視した場合のSSVEPについて背景と奥行きの影響について解析を行う.
口頭発表9:30-10:50
教育・訓練1
- 2F1-1
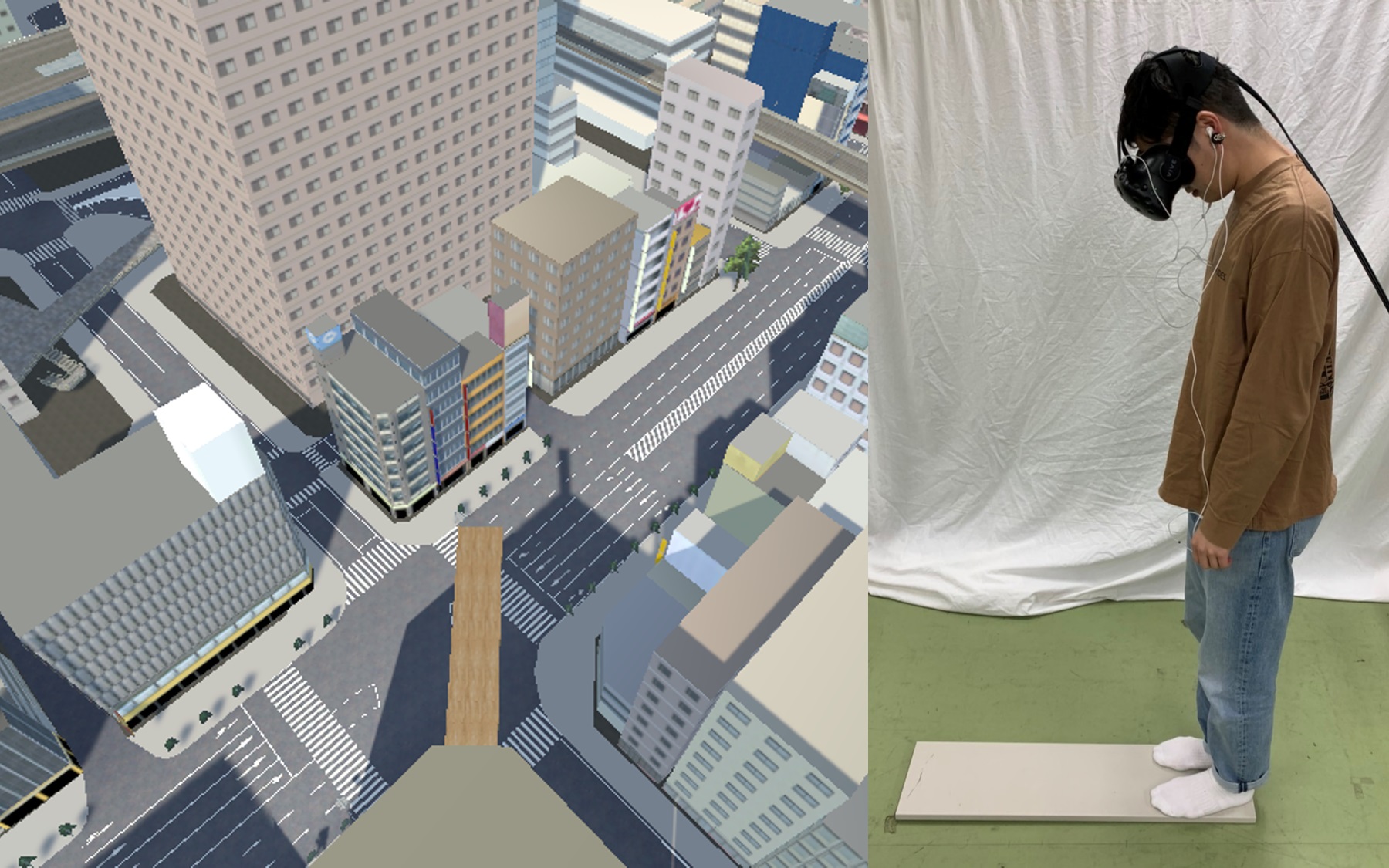
- VRを用いた地震体験システムにおける避難支援エージェントの有用性に関する研究
〇千葉 あん奈(東北学院大学大学院)、物部 寛太郎(東北学院大学) - 災害発生時には,迅速な避難行動が重要であるが,心的負担により困難な場合がある.その対策として,他者の声がけや避難誘導などが挙げられる.そこで,キャラクターエージェントをその代替として利用できないかと考えた.本研究では,VR空間で表現した災害下での避難を体験させ,心的負担を軽減する方法として,エージェントによる避難支援の有用性を検証する.

- 2F1-2
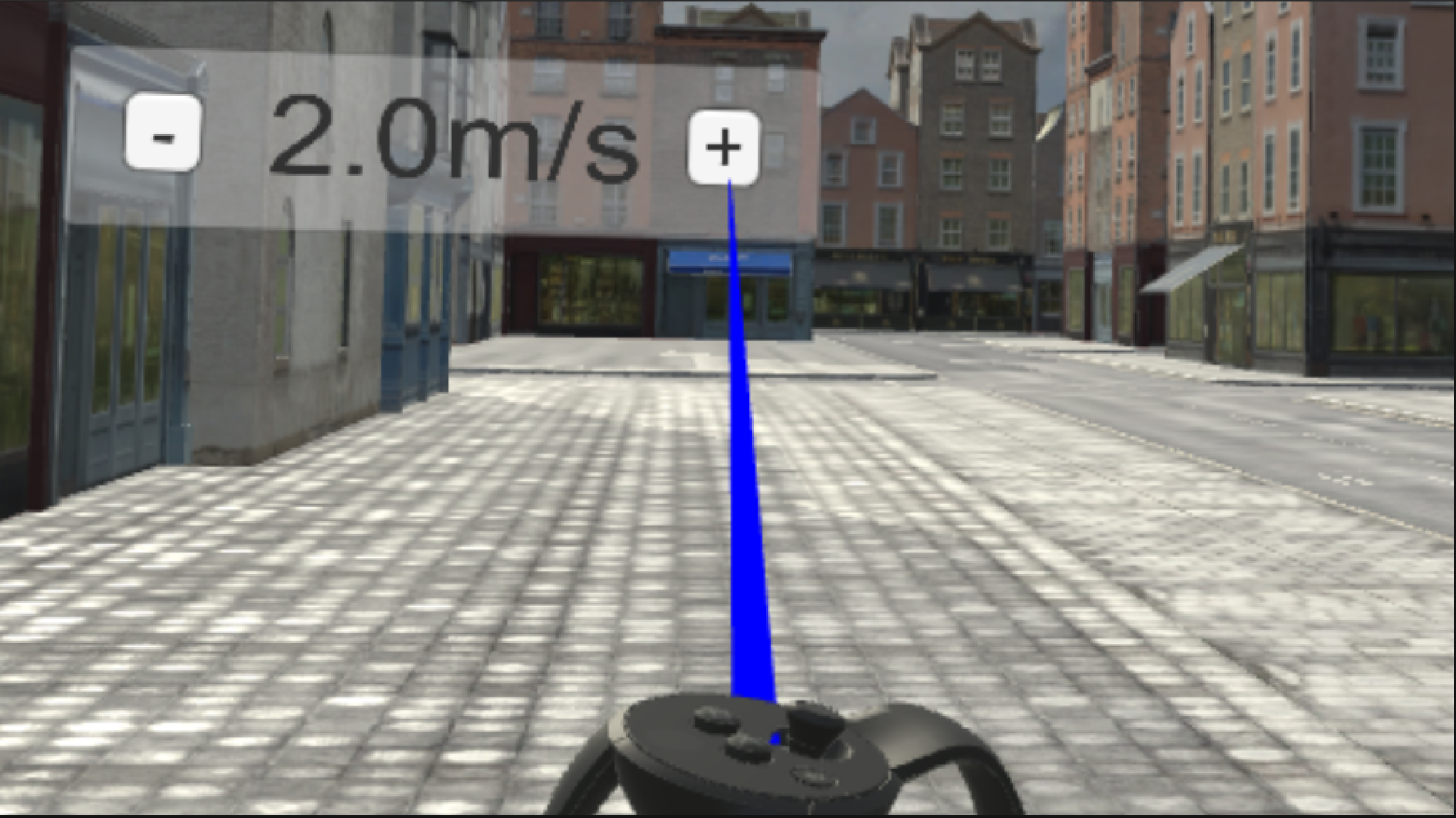
- Adaptation to VR Sickness by Adaptive Training
〇蒋 楚涵(慶応義塾大学)、小木 哲朗(慶応義塾大学) - VR sickness seriously affects the user experience. In VR walking interaction environment, navigation speed is one of the causes of VR sickness. This research was conducted on adaptive training for VR sickness. User can gradually adapted to move in VR environment by gradually increasing the navigation speed.
- 2F1-3
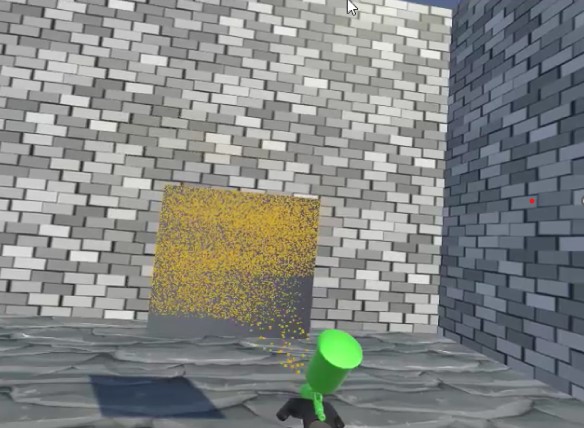
- 動的な膜厚分布モデルに基づく没入型VR塗装訓練シミュレータの開発
〇城後 賢(早稲田大学岩田浩康研究室)、高橋 慶伸(早稲田大学岩田浩康研究室)、加藤 史洋(早稲田大学岩田浩康研究室)、岩田 浩康(早稲田大学岩田浩康研究室) - 中小工場での塗装作業は職人の手作業により行われているが,それには経験や知識が必要である.未熟練者は技術向上が求められるが,実機での塗装訓練では健康被害が生じてしまうという課題が挙げられる.これを解決するため,仮想空間内で塗装訓練が可能なシステムを開発した.システム内では,作業者の塗装条件に応じた動的な膜厚分布関数を適用し,膜厚をヒートマップで表示する.
- 2F1-4
- 地域住民を対象とした養成講座におけるHMDを用いたVR教材について:認知症サポーター養成講座での取り組み
〇伊藤 研一郎(東京大学)、鈴木 はるの(東京大学)、久貝 波留菜(東京大学)、高岡 茉奈美(東京大学)、松本 博成(東京大学)、目 麻里子(東京大学)、五十嵐 歩(東京大学)、山本 則子(東京大学) - 本論文は,VR機器に接する機会の少ない地域住民を対象とした,自治体主催の養成講座や勉強会において,HMDを活用したVRコンテンツを用いた効果と酔いの有無を検証した.具体的には地域住民(約160名)を対象とするランダム化比較試験により,HMDを体験した参加者に対して実施した統合プログラムでSSQ尺度を用いて酔いの有無および,評価した.

- 2F1-5
- VRでの英語学習におけるアイコニックジェスチャーの観察
〇オレクサ ロバート(函館工業高等専門学校)、グジョン リュック(崇城大学)、タケ デイビット(函館工業高等専門学校) - We are conducting an ongoing study to better understand how students use iconic gestures to communicate in virtual spaces. Students in Japan interact with English speakers in the U.S. using the BigScreen chat app. Observations of the iconic gestures used will be presented from the 13+ hours of transcribed data.

研究委員会OS11:00-12:20
OS_倫理WG「VRと倫理 調査報告について」
- 2A2
- VRと倫理 調査報告について
○安藤英由樹(大阪芸術大学),大須賀恵美子(大阪工業大学),青山 一真(東京大学),北崎 充晃(豊橋技術科学大学) - VR分野には,人を対象とする研究,人への侵襲・介入を伴う 研究が多い,そこで学会内に「人を対象とした研究に関する倫理指針」については議論をおこなうWGを立ち上げた.このOSでは学会員を対象に人を対象とした研究に関する倫理指針を対象としたアンケート集計から見える課題と展望について議論する.
口頭発表11:00-12:20
触覚2
- 2B2-1
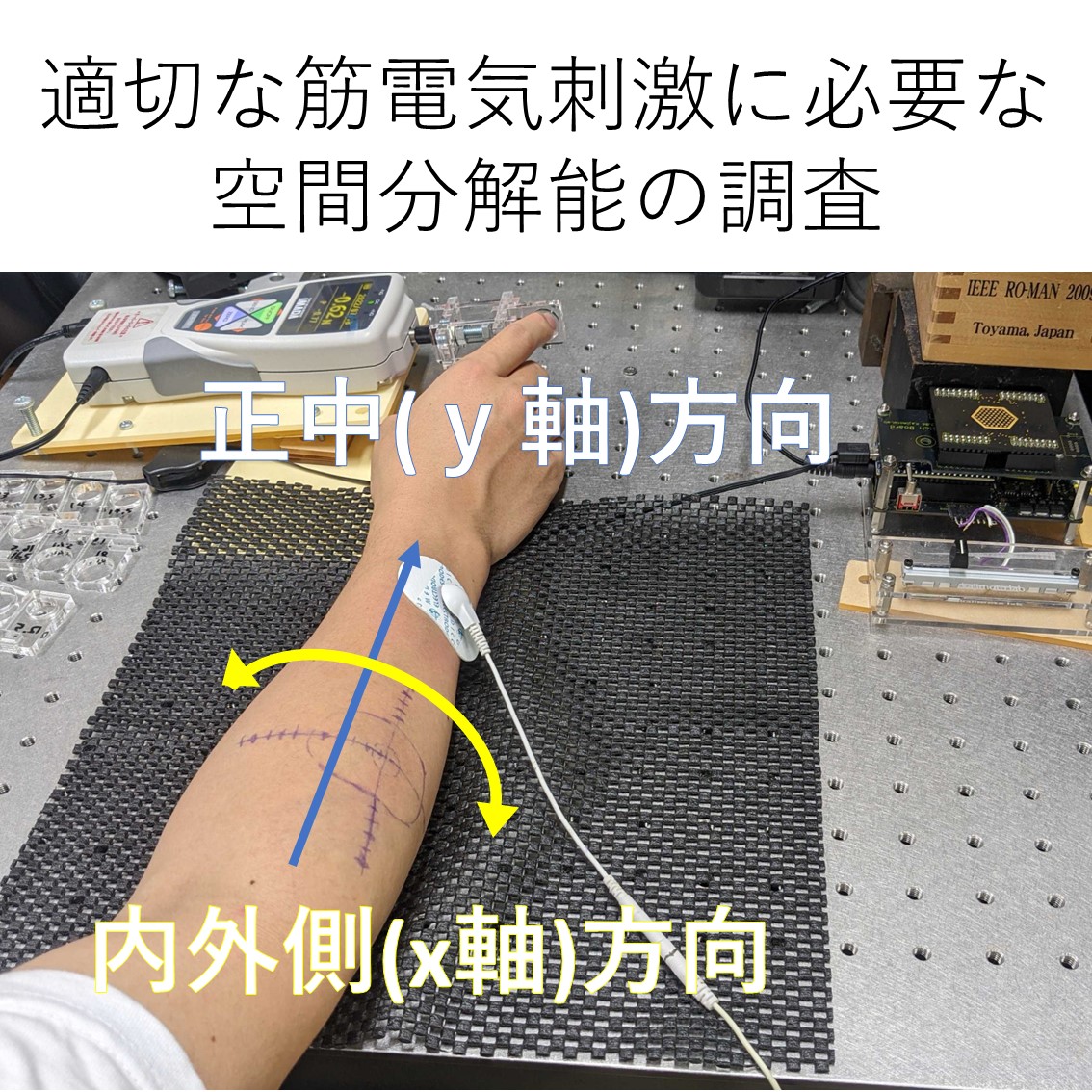
- 適切な筋電気刺激に必要な空間分解能の調査
〇石丸 嵩也(熊本大学大学院)、嵯峨 智(熊本大学大学院) - 現在触覚フィードバックにはさまざまな手法が提案されている.その中でも筋電気刺激は姿勢や操作の教示等に用いられているが,わずかな電極位置の変化によって提示力や感覚に違いが生じる.そのため,我々は電極位置を即時変更可能な電極の作成を目指している.しかし,感覚の変化が生じる最小の電極位置の変化は明らかになっていない.そこで本研究では,電極に必要な分解能について調査する.
- 2B2-2
- 道具を介した柔軟物押下時に想起されるオノマトペと物性の関連性
〇金田 実久(電気通信大学)、金子 征太郎(電気通信大学、日本学術振興会特別研究員)、梶本 裕之(電気通信大学) - 本論文では,道具を介してシリコンゲルを押下した際に想起されるオノマトペと物性の関連性を明確化することを目的とする.利き手人差し指にマレット,ゴム製の指サック,プラスチック製の指サックの3種類を装着し,物性の異なる12種類のゲルの硬軟感に関するオノマトペを回答する.得られたオノマトペの音韻を抽出し,その出現回数を用いてオノマトペと物性の関連について考察を行う.

- 2B2-3
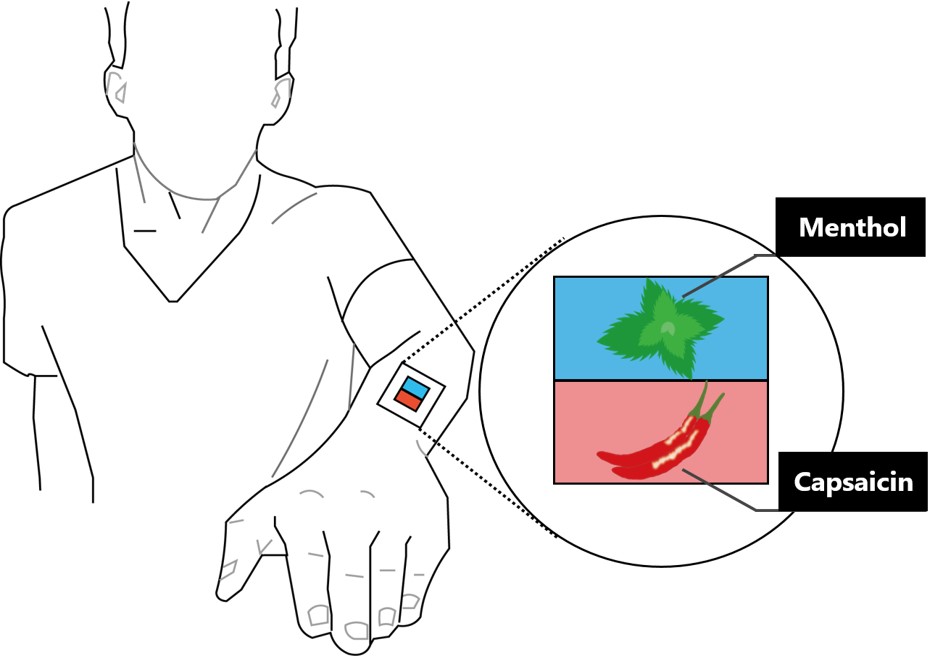
- 化学物質を用いたサーマルグリル錯覚における刺激配置の検討
〇浜崎 拓海(電気通信大学 大学院情報学専攻)、金田 実久(電気通信大学 大学院情報学専攻)、金子 征太郎(電気通信大学 大学院情報学専攻)、梶本 裕之(電気通信大学 大学院情報学専攻) - サーマルグリル錯覚(TGI)は皮膚上に温刺激と冷刺激を近距離で同時に提示すると痛覚や灼熱感が知覚される現象である.我々は2種類の化学物質を用いて隣り合わせに塗布することでTGIが生起することを確認している.本稿ではより強い錯覚を生起させることを目的として化学物質を含ませるガーゼの配置を変化させたときのTGIへの影響を検証する.6種類の配置に対して痛みや温度感を主観的に評価する実験を実施した.
- 2B2-4
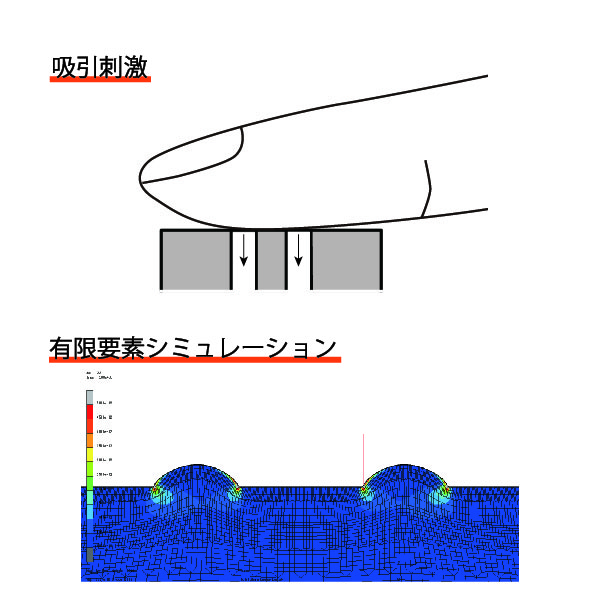
- 指腹部高解像吸引触覚ディスプレイによる把持感覚の再現 ―第3報 吸引刺激の知覚とひずみエネルギ分布の関係の調査―
〇森田 夏実(東北大学)、昆陽 雅司(東北大学)、永野 光(神戸大学)、佐瀬 一弥(東北学院大学)、田所 諭(東北大学) - 本論文では,高解像度吸引触覚ディスプレイにおいて,実時間シミュレーションにより求められる指腹と物体が接触した際の指腹のひずみエネルギ分布から,ディスプレイで提示する吸引圧を決定する方法の指針を得ることを目的とする.吸引圧の知覚閾及び2点弁別閾を実験により調べ,また,実験と同条件で有限要素解析を行い,結果を比較をすることで,人の知覚と指腹内部のひずみエネルギ分布の関係を調べた.
- 2B2-5
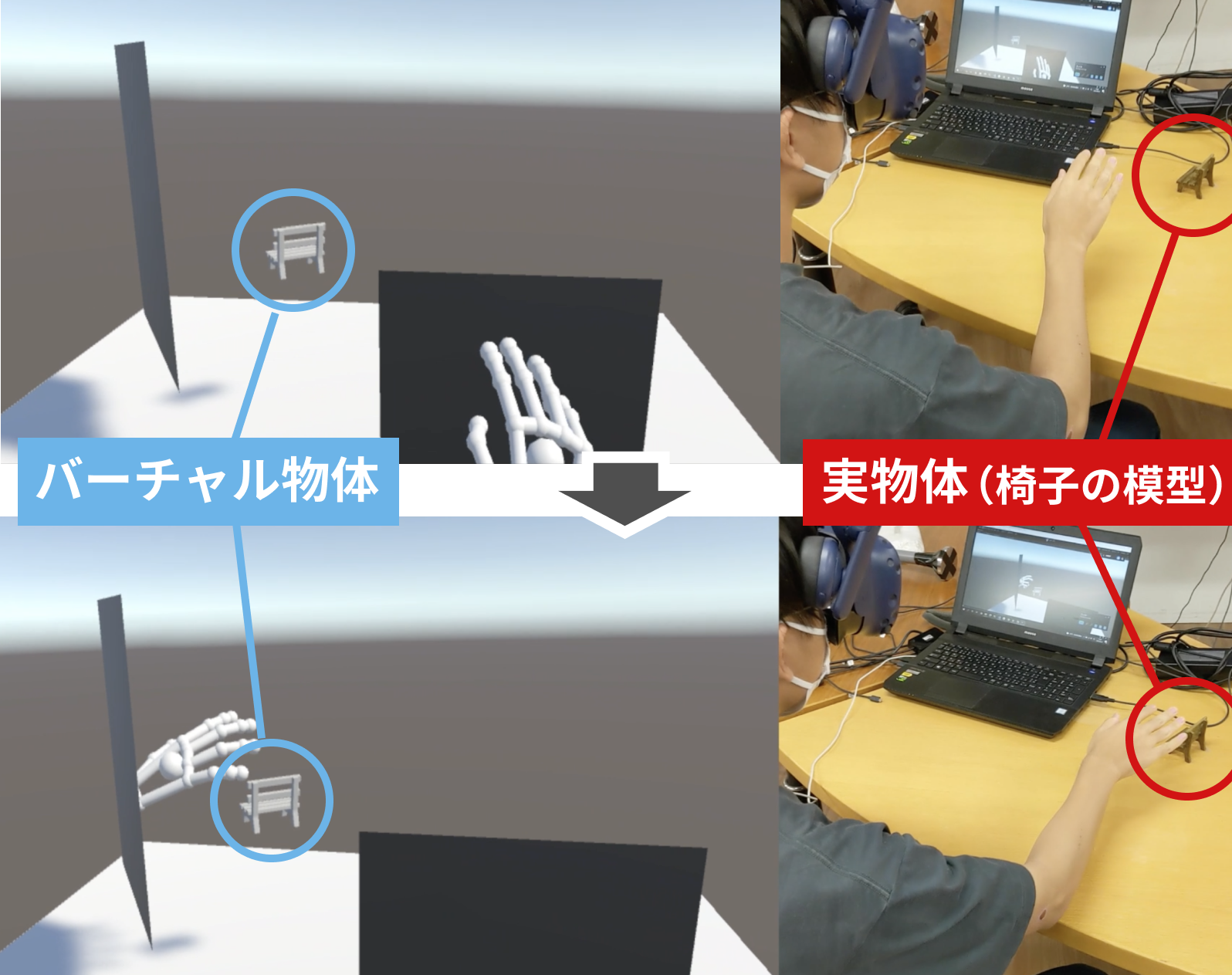
- ワームホール:VRにおける非連続的空間の接続を用いたパッシブハプティクス
〇伴 玲吾(東京大学)、松本 啓吾(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学) - VRにおける低コストな触覚提示手法として,バーチャル物体と同じ位置に代替となる実物体を置くパッシブハプティクスがある.パッシブハプティクスを用いるには実物体とバーチャル物体が同じ位置にある必要があるが,バーチャル物体の提示位置に常に実物体があるとは限らない.本研究では,実物体とバーチャル物体の位置が大きくずれている場合においても身体化感覚を維持できる「ワームホール」という手法を提案する.
口頭発表11:00-12:20
心理1
- 2C2-1
- 虚偽心拍提示による不安感増大システム
〇坂口 正道(名古屋工業大学)、磯村 聡史(名古屋工業大学) - VRエクスポージャーは,その映像刺激による不安感提示が足りず,十分な治療効果が得られない可能性がある.虚偽の心拍情報とその変化の原因の帰属先を与えることにより,情動の誘起が可能であることが示されている.本稿では,不安感をあおるVR映像に加え,虚偽心拍情報を提示することで不安感を増大させるシステムを提案する.実験の結果,心拍情報をフィードバックすることでVR映像に対する不安感が増大することが示唆された.
- 2C2-2
- 実環境とバーチャル環境間でのアバタを用いた接客体験の違いに関する探索的調査
〇畑田 裕二(東京大学)、武内 一晃(株式会社オリィ研究所)、加藤 寛聡(株式会社オリィ研究所)、山崎 洋一(神奈川工科大学)、鳴海 拓志(東京大学) - サービス産業では、バーチャル環境におけるバーチャルアバタのみならず、実環境におけるロボットアバタの活用も進んでいる。本研究では、ロボットアバタとバーチャルアバタの体験の質を比較するために、「分身ロボットカフェ DAWN ver.β」にてロボットアバタを通じた遠隔就労に従事しているユーザ11名を対象として、可能な限り実環境を模倣したバーチャル環境において接客実験を実施し、インタビュー調査を行った。

- 2C2-3
- ソーシャルVRにおける交友関係の性質と形成プロセスに関する予備的調査
〇秀 未智(東京大学)、畑田 裕二(東京大学)、葛岡 英明(東京大学)、鳴海 拓志(東京大学) - 身体や環境の編集が容易なソーシャルVRでは、実社会とは異なる文化や規範が生まれている。特に、実社会における自己が部分的に匿名化されたユーザ間の交友関係は、特性と形成プロセスが実社会とは異なると考えられる。本研究では、VRChatユーザへのインタビュー調査を通じて、ソーシャルVRユーザ同士が初対面から友人へと変化していくプロセスと、友人間で行われている活動について検討し、実社会との比較を行う。

- 2C2-4
- VRパースペクティブテイキングを用いて集団の相互理解を促進するワークショップの提案
〇工藤 龍(東京大学)、畑田 裕二(東京大学)、江間 有沙(東京大学)、中条 薫(東京大学)、鳴海 拓志(東京大学) - 他者視点の理解不足が原因で生じる問題の解決方法として,集団間接触が存在する.集団間接触にはいくつかの条件があり,有効な状況は限られている.本研究では,集団間接触をより広く適用するため,VRパースペクティブテイキング(VRPT)を用いることを提案した.ワーキングペアレントを取り巻く課題をテーマとしたワークショップへVRPTを取り入れ,VRPTがワークショップへ与える影響を探索した.

- 2C2-5
- ソーシャルVR空間参加時における被受容感に関する調査
〇方 詩涛(東京大学)、矢谷 浩司(東京大学) - ソーシャルVR空間でのユーザの被受容感は,新しく参加するユーザにとってはその空間の印象を決める重要なものである.この被受容感がどのようなユーザの振る舞いに依存するかが明らかになれば,被受容感の醸成度合いを定量的に示したり,被受容感を高める提案をコミュニティに提供したりできる.本稿では,相手を見る,相手に手をふるなどの振る舞いが,ユーザの被受容感にどう関係するかを比較検討する実験の結果を報告する.

口頭発表11:00-12:20
ユーザインタフェース2
- 2D2-1
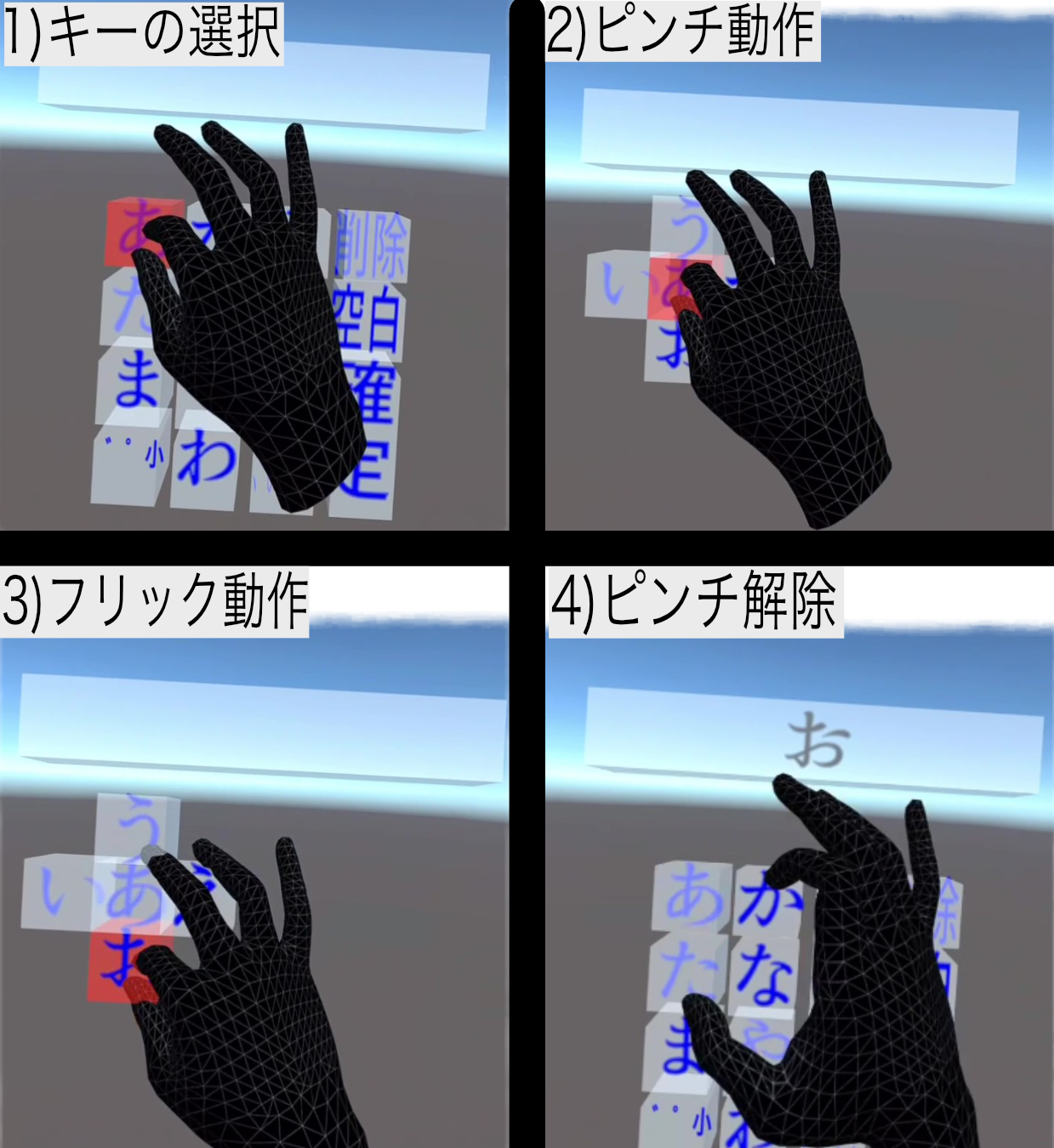
- VRにおけるピンチ動作を用いたフリック入力手法に関する研究
〇大石 真佐貴(東北学院大学大学院)、物部 寛太郎(東北学院大学) - 近年,Meta Quest 2のようにハンドトラッキング機能を搭載したHMD(Head Mounted Display) により,VR 空間に自分の手を表示する手法が確立してきている.しかし,現在VRにおけるハンドトラッキングを用いた文字入力手法の速度や精度は高くない.そこで,本研究では,スマートフォンなどと同様にテンキー配列を用いて,ハンドトラッキングにピンチ動作を組み合わせることで,手の疲労を軽減することや,速度や精度の向上を目指す.
- 2D2-2
- ARコンテンツにおける各種入力手法の精度評価
〇羽賀 夢馬(龍谷大学)、橋口 哲志(龍谷大学) - ARコンテンツにおける操作には主にコントローラやジェスチャが用いられている.これらの手法により手軽で簡易的な操作が可能である.しかし,動作の簡略化,異なる動作への置換,仮想物体とのインタラクションにはフィードバックが存在しないといった問題点があり,実体験と大きく乖離する要因となっている.そこで,本研究では実際の触感を提示できる入力手法を提案し,他の手法との精度評価を行う.

- 2D2-3
- スマートフォンの側面で皮膚電気刺激をするユーザインタフェースの検討
〇高見 太基(電気通信大学 大学院)、齋藤 大雅(電気通信大学 大学院)、亀岡 嵩幸(電気通信大学 大学院)、梶本 裕之(電気通信大学 大学院) - モバイル機器におけるユーザ体験の向上のために高解像度な触覚提示が提案されている.しかし,分布的な触覚提示を実現するには多数のアクチュエータが必要であるため,筐体が大型化する、消費電力が大きいなどの問題を抱える.我々はこれを解決する手法として,軽量薄型の電気刺激装置を用いた端末側面への皮膚電気刺激インタフェースを提案する.本稿では特に左右二列の電極アレイによる電気刺激を実装し,その有用性を検討した.

- 2D2-4
- 水中での移動感覚再現に向けたロコモーションインタフェースの検討
〇川俣 昂平(工学院大学大学院工学研究科)、蒲池 みゆき(工学院大学情報学部) - 本研究は,手軽なスキューバダイビング体験の実現を目的に,VR環境下(地上)で全身を使わずに水中の移動感覚を再現できるインタフェースを構築し評価を行なった.具体的には,水中での移動方向を決定するインタフェースとして頭部もしくは手を用いる場合の違いを,主観評価および水中でのターゲットを経由する速度など客観評価による検討を通して,水中ならではのインタフェースの利便性を調べ,実験結果について発表を行う.

- 2D2-5
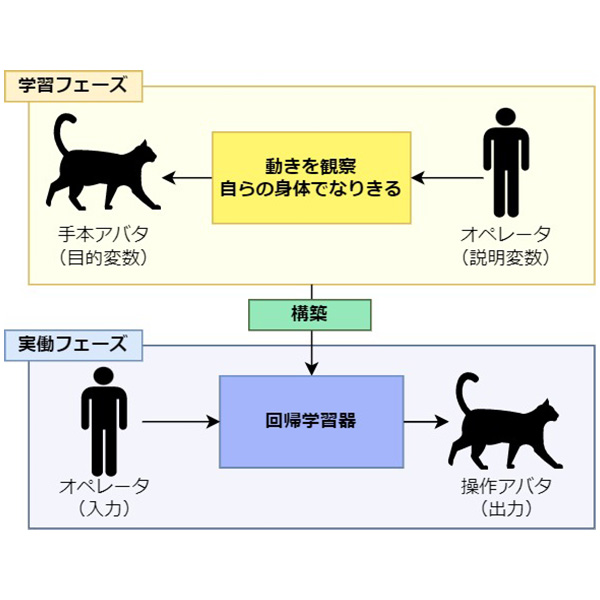
- 回帰学習による動きの対応付けを用いたアバタ操作手法「なりきり制御」の提案
〇山口 周(東京大学)、畑田 裕二(東京大学)、鳴海 拓志(東京大学) - 本研究では,重機や動物等の非ヒト型アバタを直観的に操作するための手法として,「なりきり制御」を提案する.なりきり制御では,ユーザが非ヒト型アバタの動作を見てそれを自分なりに真似た時の身体動作を記録し,これと非ヒト型アバタの関節角度とを回帰学習で対応付けることで,ユーザの動きを非ヒト型アバタの動きに変換する.この手法により自由度の異なる3つの非ヒト型アバタを操作させる実験の結果,関節自由度が小さいアバタを操作する際には行為主体感と自己効力感が高まり,直観的な操作が可能であることが示唆された.
口頭発表11:00-12:20
クロス・マルチモーダル4
- 2E2-1
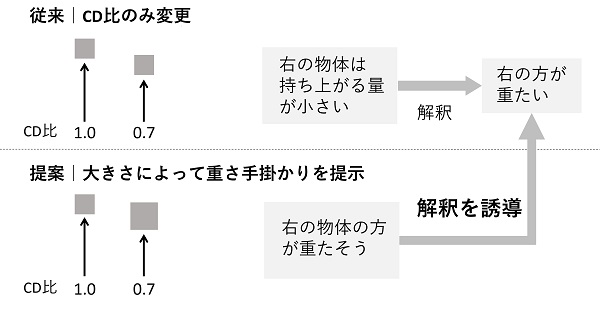
- バーチャル物体の大きさがPseudo-hapticsによる重さ知覚に与える効果の検証
〇島村 一輝(東京大学)、下村 祐樹(東京大学)、伴 祐樹(東京大学)、宇治土公 雄介(日本電信電話株式会社)、割澤 伸一(東京大学) - Pseudo-hapticsは物理的触覚提示デバイスを用いずとも疑似的な触力覚を提示可能な現象として着目されている一方で,その効果の大きさには限界がある.そこで本研究では,バーチャル物体の重さ知覚を操作するPseudo-hapticsの効果向上のため,物体の大きさによる重さ手掛かりを提示することで視覚フィードバックの解釈を誘導する手法を提案する.実験の結果,個人間や重さ知覚の操作方向の間で,物体の大きさの及ぼす効果が逆転した可能性が示唆された.
- 2E2-2
- Pseudo-hapticsに牽引力錯覚を組み合わせることによる知覚される抵抗力・推進力の増強
〇河岸 知浩(東京大学)、伴 祐樹(東京大学)、宇治土公 雄介(日本電信電話株式会社)、割澤 伸一(東京大学) - Pseudo-hapticsは視覚を利用して疑似的な触力覚を提示可能な技術として注目されているが,その効果には限界がある.そこで本研究ではPseudo-hapticsにより知覚される力を増強させるため,非対称振動刺激による牽引力錯覚を組み合わせるという手法を提案する.実験からそれぞれ単体の力覚提示を行う場合より,両方を提示する場合の方が力を強く感じられる傾向があることが示された.
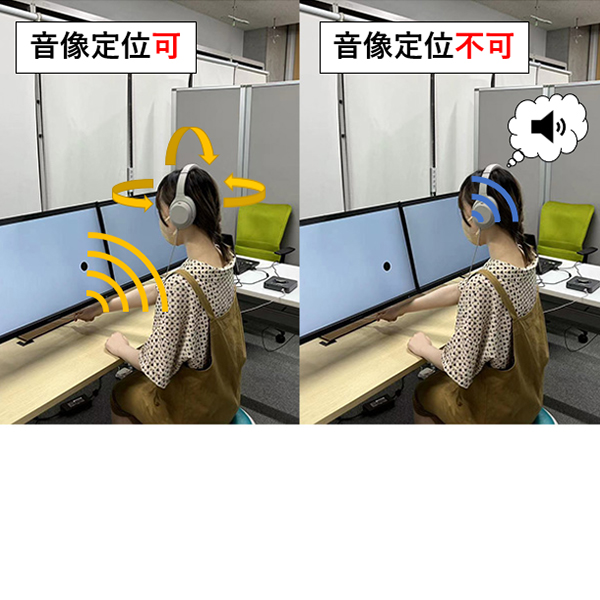
- 2E2-3
- 聴触覚クロスモーダル効果に対する音像定位の影響
〇金 祎(東京大学)、伊東 健一(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - 聴触覚クロスモーダル効果は今までに多くの検証がなされており,例えば表面の粗さ知覚が聴覚刺激により変化することが知られている.音像定位は重要な聴覚知覚だが,テクスチャ知覚に対する聴触覚クロスモーダル効果への音像定位の影響は解明されていない.音像を頭内または頭外定位する条件で,やすりを棒でなぞる際の粗さ知覚について検証した結果,頭外定位によって粗さを強く知覚する効果が高まることが明らかとなった.
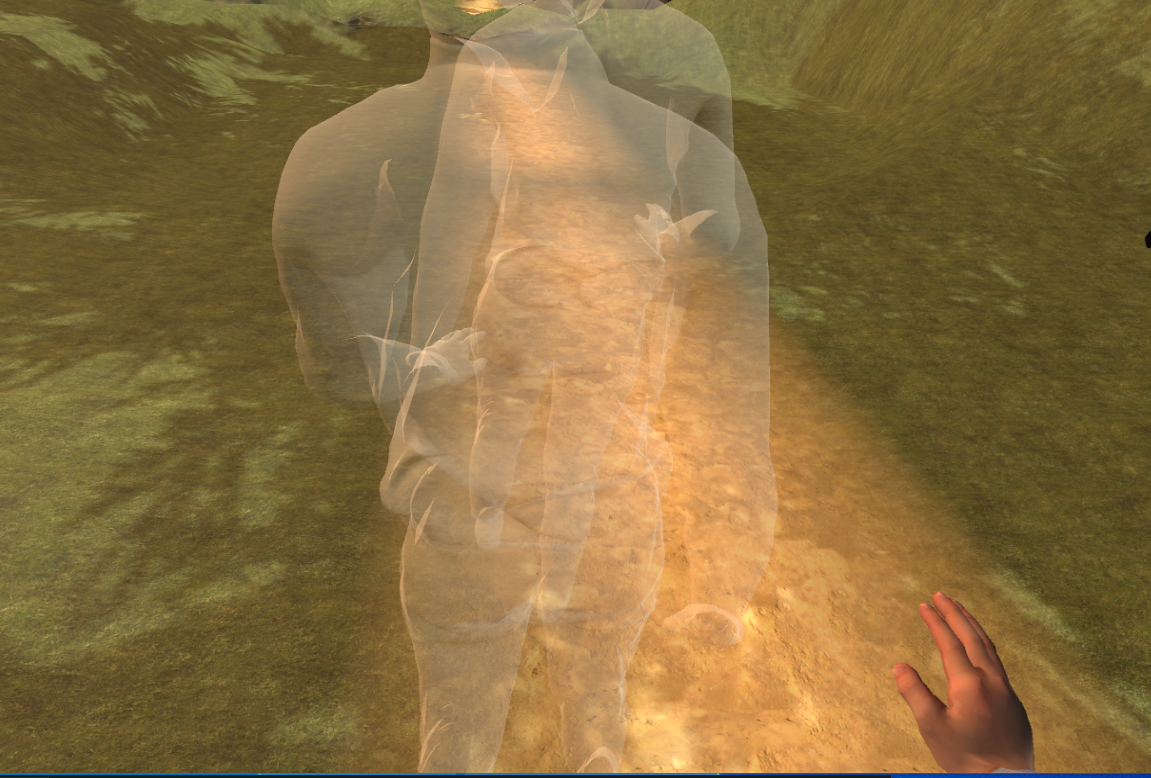
- 2E2-4
- バーチャル逆再生における視覚と聴覚の相互作用
〇坂田 玲央(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - 逆再生は、人が体験する時間変化をバーチャルに操作する方法といえる。そこで、一人称視点から得る体験を記録し、順再生・逆再生して体験するシステムを構築し、視覚情報と聴覚情報の順逆情報の一致性が体験に及ぼす影響を検討する。仮説として、視覚情報と聴覚情報がともに逆再生で一致しているときには、いずれかのみが逆再生である場合よりもより強い逆再生体験が生じることが予想された。
- 2E2-5
- 仮想空間における触感の有無が大きさ重さ錯覚に与える影響の分析
〇和田 洸一(立命館大学)、笹田 明良(立命館大学)、松室 美紀(立命館大学)、前東 晃礼(静岡大学)、新井田 統(株式会社KDDI総合研究所)、柴田 史久(立命館大学)、木村 朝子(立命館大学) - 大きさ重さ錯覚とは同じ重量でも,大きい物体より小さい物体がより重く知覚されるという錯覚現象である.本研究では,触覚フィードバックの差異に着目し,現実空間と仮想空間での大きさ重さ錯覚の発生傾向を検討している.以下の3条件で錯覚の発生傾向を比較した:現実空間,仮想空間(現実空間と同じ触覚フィードバック),仮想空間(触覚フィードバックなし).結果,同じ仮想空間でも触感の有無により異なる傾向となった.
口頭発表11:00-12:20
教育・訓練2
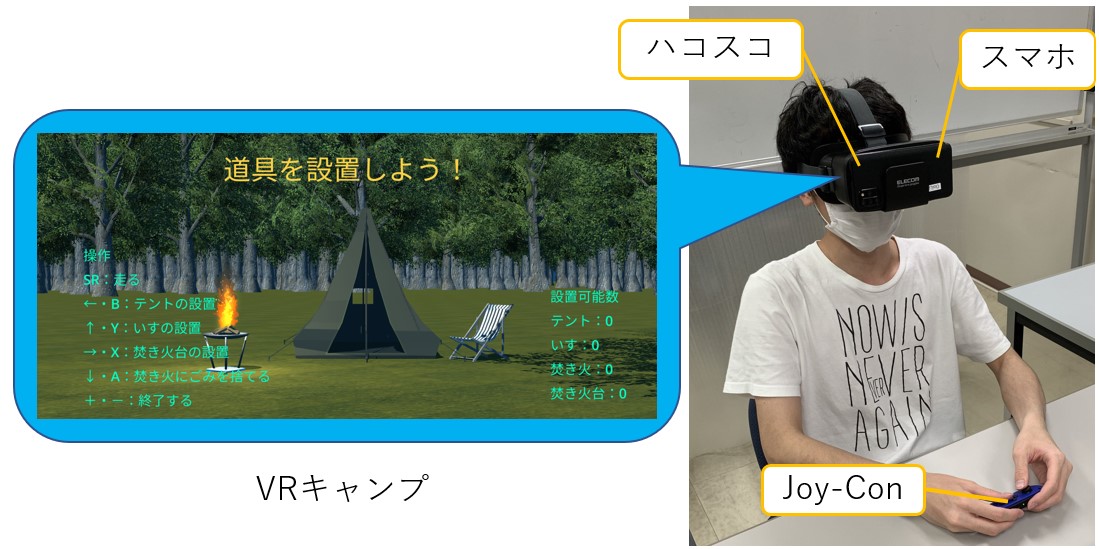
- 2F2-1
- VRキャンプによる焚き火に関するマナー向上システムの開発
〇今西 海斗(大阪工業大学)、大井 翔(大阪工業大学) - 日本オートキャンプ協会の調査報告によると2019年まではキャンプ人口が増加傾向にあり、2020年はCOVID‑19の影響により減少したがキャンプの需要は高いことを報告しており、今後もキャンプ人口の増加が予想される。しかし、キャンプ人口の増加に伴い、焚き火やゴミの放置や騒音といったキャンプ場利用における問題が指摘されている。本研究はキャンプ場利用による焚き火に関するマナー向上を目的とする。
- 2F2-2
- 教師の憑身体を用いた遠隔技能伝承の提案とワークショップの実践
〇鈴木 嵩茂(東京大学)、児玉 大樹(東京大学)、中村 拓人(東京大学)、鳴海 拓志(東京大学)、雨宮 智浩(東京大学)、葛岡 英明(東京大学) - 合気道など身体接触を伴う技能の伝承を遠隔化する時、現存する触力覚デバイスでは現実に十分近い刺激提示をできない課題がある。本研究では生徒への触力覚提示役として生身の人間(依代)を利用し、依代を教師が遠隔から操作(憑依)して技能を教える手法を提案する。本報告では、手法の実現・検証に向けて実施したワークショップにて技能の指導経験者より得た、依代の体(憑身体)を操作する方法に関する知見について述べる。
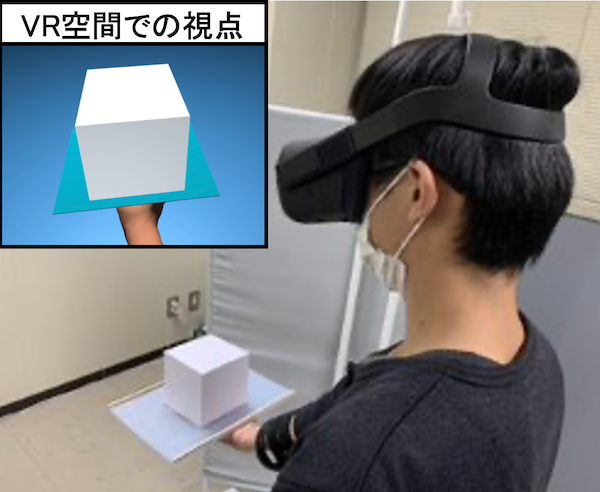
- 2F2-3
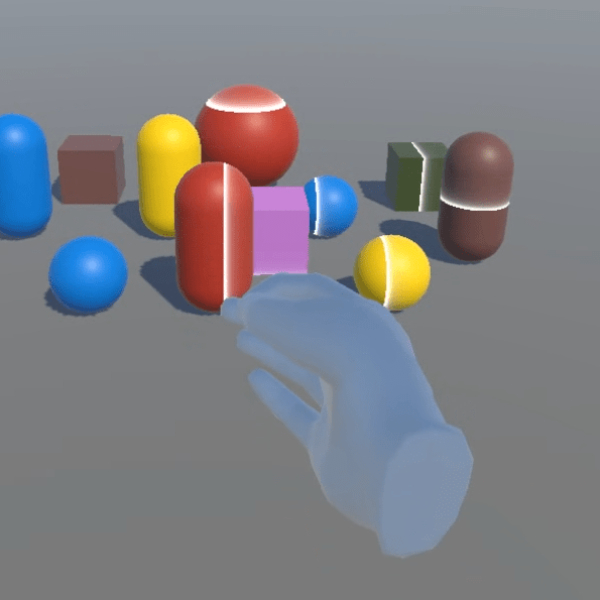
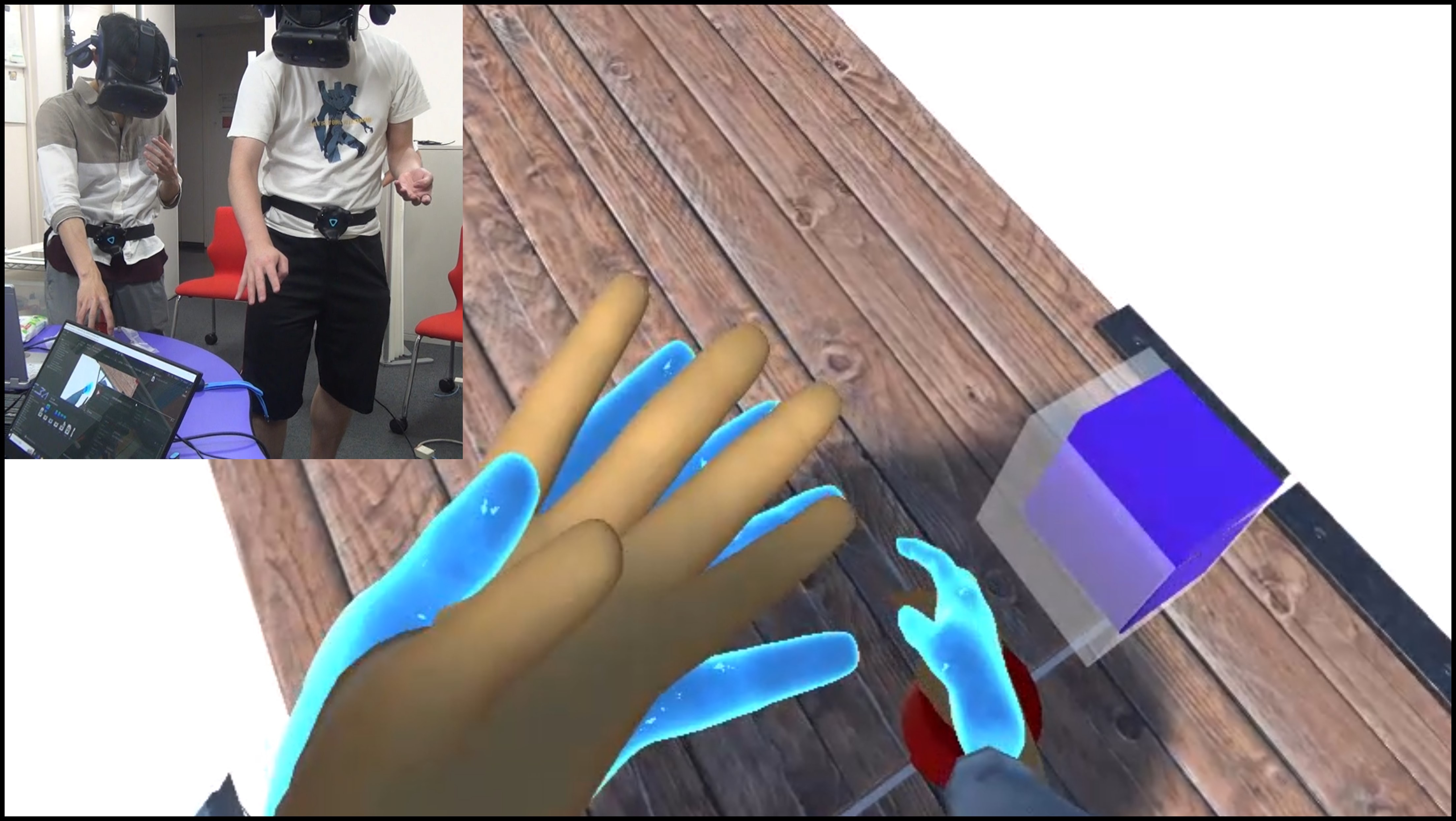
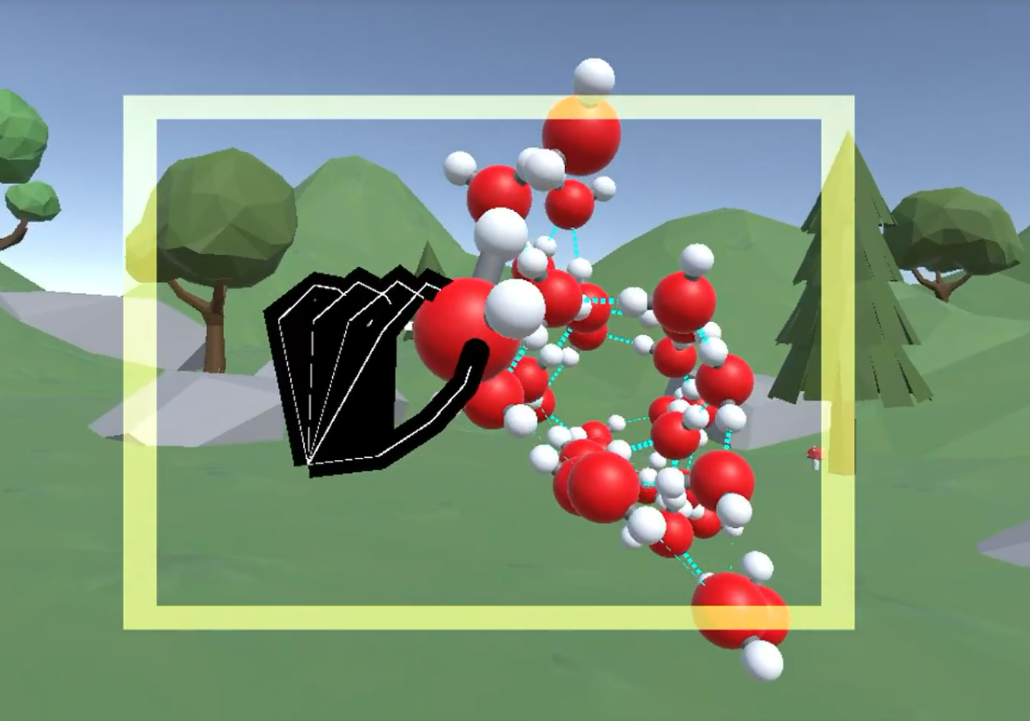
- VR-MD: スマホ VR で実施する分子動力学計算の実装
〇吉川 信明(株式会社豊田中央研究所)、松田 健郎(株式会社豊田中央研究所)、梶田 晴司(株式会社豊田中央研究所)、佐藤 宗太(東京大学)、谷川 智洋(東京大学) - 化学教育現場におけるバーチャルリアリティ(VR)技術の 活用を目的に、Unityを用いてスマートフォン上に分子動力学(MD)計算のアプリケーションを実装した。本アプリケーションでは実際の研究現場で使用される MD 計算と同等の分子運動を再現しており、利用者のリアルな分子運動の理解を助ける。スマートフォンと簡易 VR レンズ、スマートフォン搭載のカメラのみで六次元自由度(6Dof)の分子表示とハンドトラッキングシステムを実現しており。VR 空間上に表示された手モデルと分子の間に相互作用を導入することで分子に『触る』『掴む』などの操作が可能である。
- 2F2-4
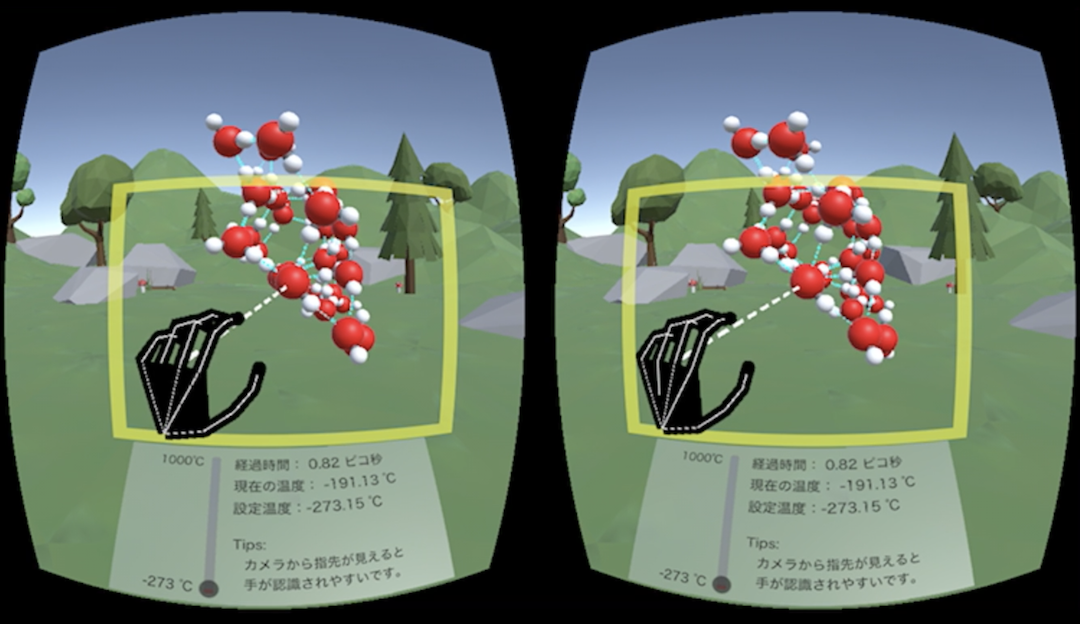
- VR-MD:スマホVRで実施する分子動力学計算による化学教育効果の検証
〇松田 健郎(株式会社豊田中央研究所)、吉川 信明(株式会社豊田中央研究所)、梶田 晴司(株式会社豊田中央研究所)、佐藤 宗太(東京大学)、谷川 智洋(東京大学) - 近年の VR 技術の発展を受け、教育現場での VR への期待も高まっている。 分子の立体構造の理解が重要となる化学の分野でもアプリケーション開発が進んでいる。VR 教材の実利用を考えると、1教室の人数で一斉に利用できることが望ましい。そこで、スマートフォンにVR レンズを取り付けた簡易 VR 装置を利用し、高校での模擬授業を実施した。授業後のアンケート結果をもとに学習意欲や理解度への影響について報告する。
- 2F2-5
- STEAM教育の実践に向けた全天球型発電所探索アプリの設計指針
〇田代 穂香(早稲田大学)、瀬戸崎 典夫(長崎大学)、藤本 登(長崎大学)、森田 裕介(早稲田大学) - 本研究では,田代ら(2021)が開発した全天球型発電所探索アプリを用いたSTEAM教育の実践を想定し,小学校教員を対象とした主観評価をもとに本アプリの改善すべき点について検討した.その結果,情報の追加,機能の追加,視聴覚メディアの充実などが挙げられた.そこで,本研究では,得られた意見をもとに,STEAM教育の実践に向けた本アプリの具体的な設計指針を示すことを目的とする.

技術・芸術展示12:20-14:00
技術・芸術展示2 コアタイム
- 2G-01
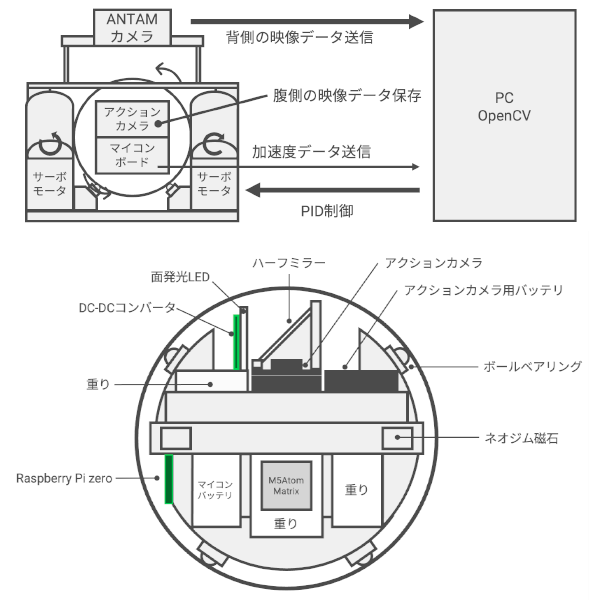
- 回転球殻内に配したカメラ姿勢安定化と振動計測による評価
〇田邊 匠(京都産業大学)、岡 凌平(京都産業大学)、森下 仁(京都産業大学)、永谷 直久(京都産業大学) - 腹側からの行動観察を可能にする装置の開発において、問題であった振動の抑制を行うために、回転球体内に配したカメラの姿勢を安定化させる機構の提案を行う。球体内に搭載する機体を磁石を使用して外側4点から固定し、手ぶれ補正機能の付いたカメラを搭載することで映像のブレを抑制する。 加速度センサを使用した球体内の機体本体振動と、球体内のカメラで撮影したマーカの重心座標の変化から振動の評価を行った。
- 2G-02
- 深度ビデオシースルー型VRヘッドセットにおける撮影視点と観察視点の差が作業に及ぼす影響
〇大橋 聖也(岐阜大学 自然科学技術研究科)、木島 竜吾(岐阜大学 工学部) - ビデオシースルー型HMD(Head Mounted Display)においては,カメラの視点(撮影視点)と装着者の眼球位置(観察視点)を一致させる配慮は,時に鏡を使うなどして行われるが,これも広角な場合には実現困難である. 本研究では深度カメラを用いて深度ビデオシースルー型HMDを構成し,被験者実験によりタスクパフォーマンスを指標として両者の視点深さの差の影響を調べた.影響は大きいが,作業への慣れにより相当程度緩和されることを示した.

- 2G-03
- Mechanical Brain Hacking:ロボットアバタを用いた 自らの脳改造・身体システム改造体験
〇高下 修聡(東京大学大学院学際情報学府)、鈴木 大河(東京大学大学院情報理工学系研究科)、田中 尚輝(東京大学大学院情報理工学系研究科) - 本企画では、ロボットアバタを装用してアバタの脳内回路を自ら改造し、身体機能を獲得・変更する体験を通して、日常で体験できない可塑的な身体感を体験者に提供する。また、現実の動作をアバタ脳内の動作制御モジュールからの出力として扱うことで、現実の意識・身体動作に、そのモジュール内に存在する意識体、いわば魂としての役割を与える。これにより、機械身体を持つ意識体としての人間に非生得的な価値観の獲得を目指す。
- 2G-04
- 作品 “In Front of the Horizont (Cycloroma)”
〇長谷 海平(関西大学)、矢崎 俊志(電気通信大学)、関口 敦人(愛知県立芸術大学)、柴崎 幸次(愛知県立芸術大学)
- 2G-06
- VR道の駅構想と,そのVR内インターフェースに対する年代別の認識・反応の調査
〇中村 陽介(城西国際大学)、内山 達也(城西国際大学)、中川 晃(静岡文化芸術大学)、高桑 真恵(城西国際大学) - VRを活用した地方の観光・特産品販売促進の役割を担うハブ的プラットフォーム「VR道の駅」を構想し,制作と検証を行なった.制作の第一段階では,VR空間で能動的に特産品の情報にアクセスし,販売促進に繋がるコンテンツを制作した.本コンテンツはあらゆる年代が能動的にアクセス可能なコンテンツの配置・提示方法を検討し,20〜70代61名の被験者の体験からその有効性について検証を行った.

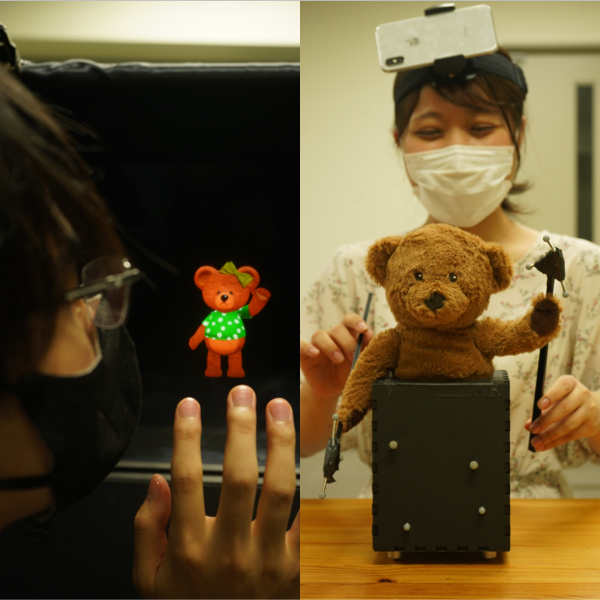
- 2G-07
- 人形モーションキャプチャによる空中像キャラクターの操作
〇福岡 美結(電気通信大学)、安藤 将平(電気通信大学)、小泉 直也(電気通信大学) - 本研究では、空中像のCGキャラクターを平易に操作することを目的として、人形モーションキャプチャと人の身体動作を組み合わせた融合的操作手法を提案する。これは人や人形の身体動作を介してCGキャラクターを操作する手法における課題であった、空間移動の操作や同時操作が困難な点を解決しつつ、空中像の特徴である飛び出す動きを平易にするものである。本研究では、操作手法を試作し、操作可能なキャラクターの動きを検討した。
- 2G-08
- 対話的なキャラクターエージェントのための動作データの到達目標列への自動変換
〇上野 瑞生(東京工業大学)、三武 裕玄(明治大学)、佐藤 裕仁(東京工業大学)、杉森 健(東京工業大学)、長谷川 晶一(東京工業大学) - VRなどの普及により対話相手や環境に調和するインタラクティブなアニメーションの需要が増加している.そのようなアニメーションの表現方法の一つである到達目標列を用いた手法では,既存の動作データやモーションキャプチャを活用することができず,手作業で到達目標を設定していく必要がある.本稿では,動作データから到達目標列を自動抽出し,そのような手間を軽減する手法を提案する.

- 2G-09
- LEDアレイによる影投影を用いた身体感覚提示に関する検討
〇中山 雄介(公立千歳科学技術大学)、阿部 法寛(公立千歳科学技術大学)、青木 広宙(公立千歳科学技術大学) - モーションキャプチャ技術によりCGをコントロールすることで身体感覚を提示することは、VR技術において一般的に行われている。本研究では、CGを使わずに身体感覚提示を行う方法について提案する。具体的には、モーションキャプチャされた身体運動を元に、アレイ状に配列されたLEDの発光を制御することでオブジェの影を壁面に投影し、影の動きによって身体感覚を提示するシステムを試作した。

- 2G-10
- 発表取り消し
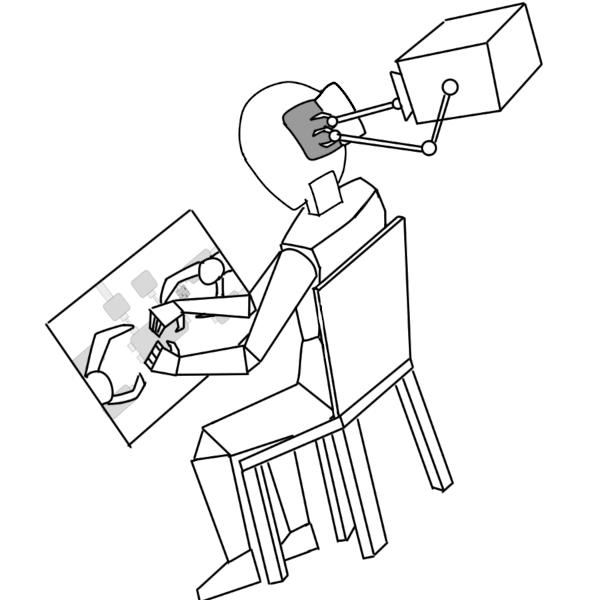
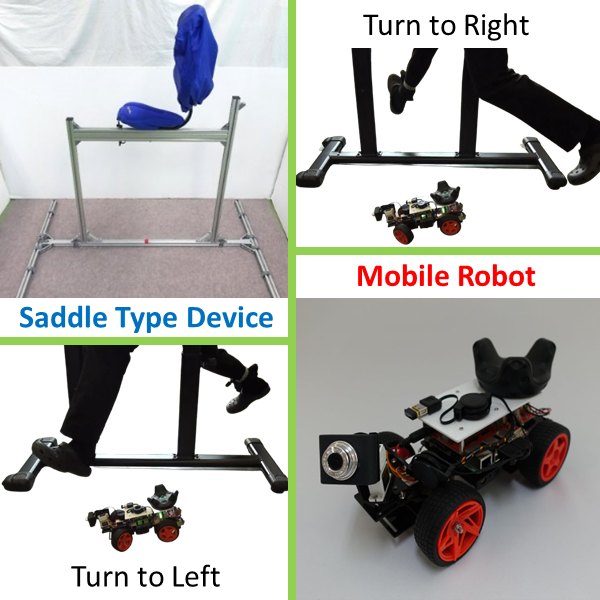
- 2G-11
- サドル型歩行デバイスを用いた歩行動作による移動ロボットの遠隔操作
〇久米 俊輔(名古屋工業大学)、坂口 正道(名古屋工業大学) - 我々はサドルに座り体重を免荷しつつ実際の歩行と同様の動作が可能なサドル型歩行デバイスを開発した.また,これまでに我々は直感的な操作を実現すべく,ユーザーの頭部および手の動きをもとに移動ロボットの方向制御を行う方法を確立した.本研究では,より直感的な操作の実現に向けて新たにユーザーの足の動きによる方向制御方法について提案する.
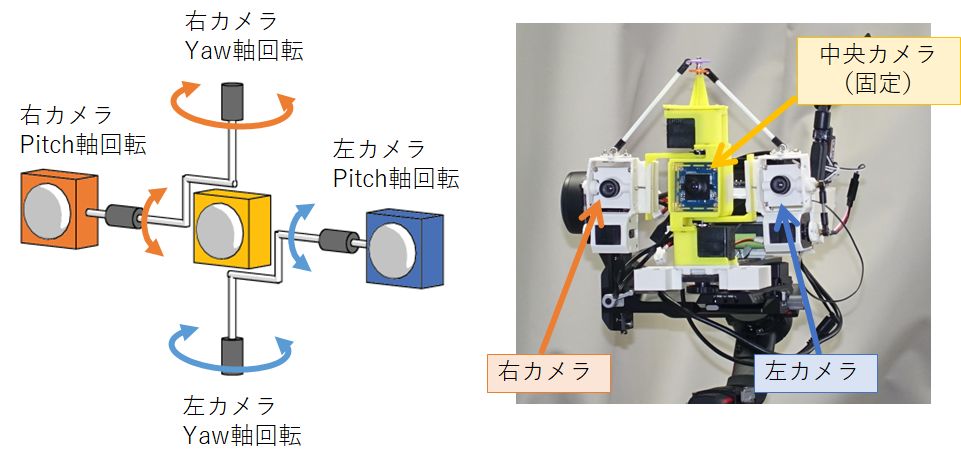
- 2G-12
- 3眼アバターロボット:ユーザの視野を相互共有するテレプレゼンスシステム
〇井上 康之(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - 複数ユーザがひとつのアバターを操作する共有身体システムを使ったテレプレゼンスを実現するには、ユーザごとに異なる頭部方向に対応したアバターの視点映像をどのように取得して各ユーザの視野に提示するかが課題である。本研究では、左右カメラに加えて中央に「第3の目」を備えた3眼アバターロボットを開発し、各カメラの映像をユーザ間で共有する「2人3眼」式のテレプレゼンスシステムを提案する。
- 2G-13
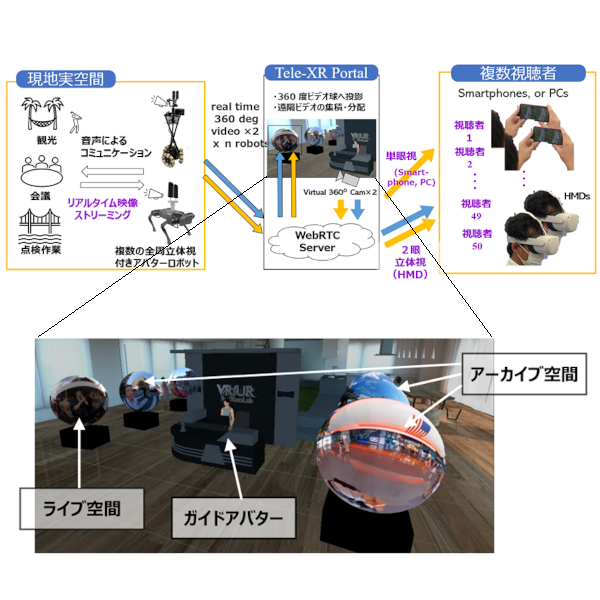
- 遠隔ライブ・記録映像の全方位マルチ視聴 XRメタバースシステムに関する研究
〇菊地 勇輔(東京都立大学)、小島 優希也(東京都立大学)、長井 超慧(東京都立大学)、YEM VIBOL(東京都立大学)、池井 寧(東京大学) - 社会活動のリモート参加は引き続き重要になると考えられる. 現状、その手段としてはWebカメラを用いた会議システムが利用されるが,会議システムの視野は狭画角のカメラ方位に限定され、任意視点、立体視の利用ができないため空間の正確な把握が難しい。 本研究では、全方位立体視カメラを利用することで遠隔の実空間映像を取得し、複数の参加者が遠隔の実空間とアーカイブ映像およびメタバース仮想空間を体験できるTele-XR Portalを提案する。
- 2G-14
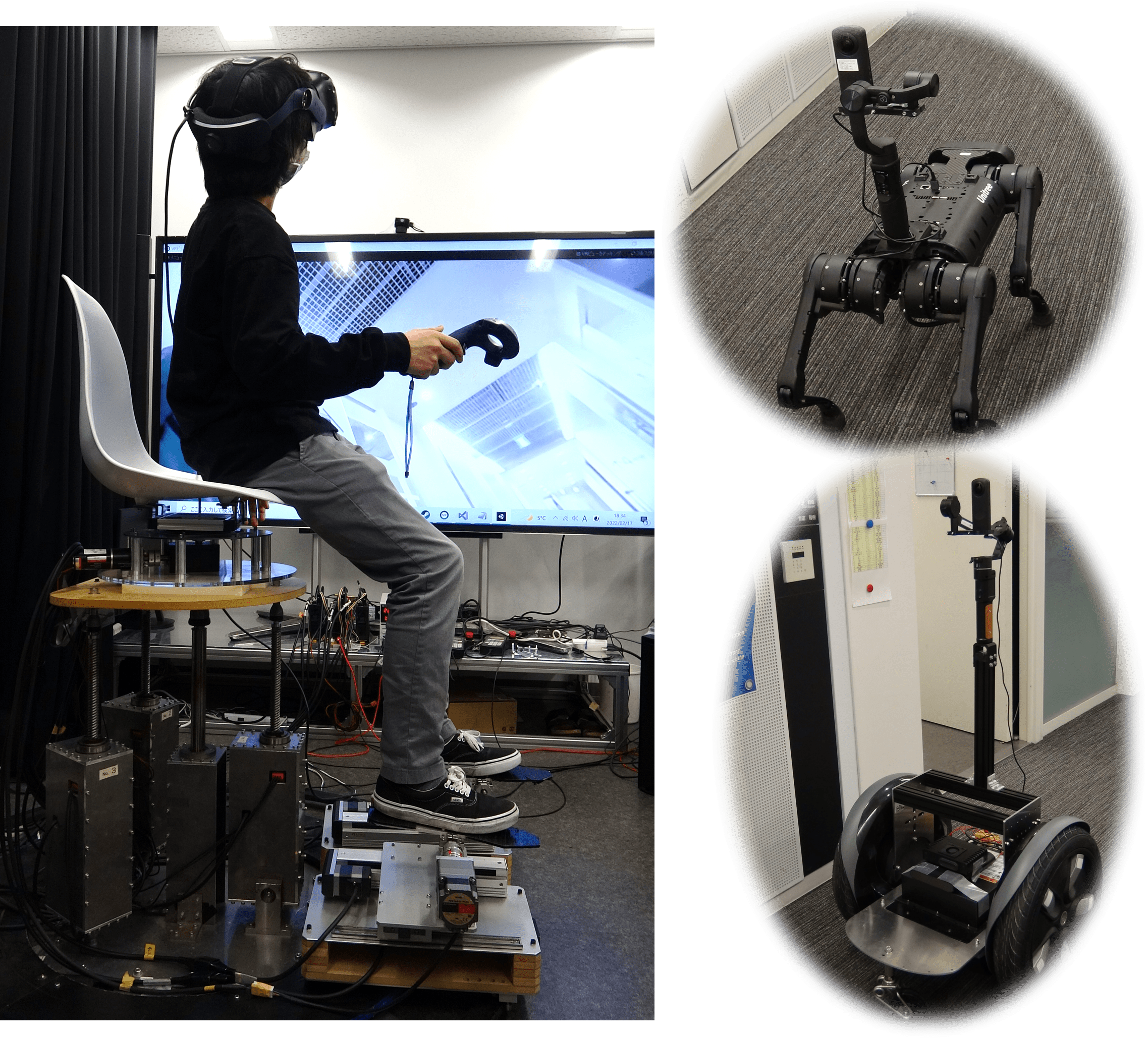
- テレプレゼンスロボットと歩行感覚フィードバックを用いたリアルタイムマルチ空間の体験
〇小島 優希也(東京都立大学)、菊地 勇輔(東京都立大学)、YEM VIBOL(東京都立大学)、池井 寧(東京大学) - 本稿では,時間と空間の制約を超えることを目的として,遠隔地にある二輪型と四足型のテレプレゼンスロボットをリアルタイムでほぼ同時に操作することを可能としたシステムを構築した.操縦者は複数の遠隔空間を選択可能であり,歩行感覚フィードバックを与えることで,VR酔いを抑制するとともに没入感を向上させる.また,本システムではテレプレゼンスロボットの視点を50人の参加者まで共有することが可能である.
- 2G-16
- 膝におけるハンガー反射による歩行誘導の研究
〇福井 岳(東京大学)、中村 拓人(東京大学)、松本 啓吾(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学) - 腰でのハンガー反射による歩行誘導は大きな歩行誘導効果を持つものの、利用者が大きな歩行誘導感を覚えること、腰回りは体格差が大きく、多様なサイズのデバイスが必要となることといった欠点があった。そこで本研究では、体格差の小さい膝でのハンガー反射を用いた歩行誘導について調査した。その結果として、膝でのハンガー反射が歩行を曲げることが確認され、腰よりも個人差が小さい部位での歩行誘導可能性が示された。

- 2G-17
- スマートフォンアプリケーションによる食感拡張手法の検討
〇溝口 泉(電気通信大学)、梶本 裕之(電気通信大学) - 飲食における咀嚼は飲食物を細かくし嚥下運動を容易にする他に食感や味を楽しむために重要な運動である. 現在XR分野において視聴触覚を用いた食感の拡張手法が研究されているが,多くの場合専用のデバイスを用いる必要がある. 本研究ではスマートフォンを主に使用し,スマートフォンを把持する動作とアプリケーションからの映像・音声を用いて飲食物の食感を変化,拡張させる手法を提案する.

- 2G-18
- 発表取り消し
- 2G-19
- 指先側面への電気刺激による疑似力覚提示の検討
〇中山 翔太(電気通信大学)、真鍋 光希(電気通信大学)、牛山 奎悟(電気通信大学)、田中 叡(電気通信大学)、宮上 昌大(電気通信大学)、髙橋 哲史(シカゴ大学)、梶本 裕之(電気通信大学)
- 2G-20
- (展示OS_ハプティクス研究委員会)皮膚インピーダンスによる触覚電気刺激の感覚閾値のリアルタイム推定
〇YEM VIBOL(東京都立大学) - We attempted to predict cathodic sensation threshold with R and C values during presenting pre-pulses of 0.2mA and 0.4mA. We used resistance and capacitance of the skin as the features of prediction. Random Forest Regressor showed that we can predict the threshold value.
- 2G-21
- (展示OS_ハプティクス研究委員会)掌への圧力刺激デバイスを用いた疑似力覚提示
小嶋 麻由佳(東京大学)、小西 駿介(東京大学)、〇吉元 俊輔(東京大学)、山本 晃生(東京大学) - バーチャルリアリティや遠隔操作環境において力覚提示の利用が有効であるが,接地型の装置では使用環境が限られる.このような課題を解決するため,著者らは手掌部に圧力刺激を加えることで,力覚を代替するデバイスを開発し,知覚特性の評価を行ってきた.本発表では,圧力刺激機構を把持型のコントローラに組み込んだデバイスを用いて,仮想物体の操作における力覚を疑似的に表現するアプリケーションの展示を行う.
- 2G-22
- 皮膚温度変化をゼロに保ちつつ感覚を生じさせる非接触冷覚提示
〇許 佳禕(筑波大学)、長谷川 晶一(東京工業大学)、清川 清(奈良先端科学技術大学院大学)、家永 直人(筑波大学)、黒田 嘉宏(筑波大学)
- 2G-23
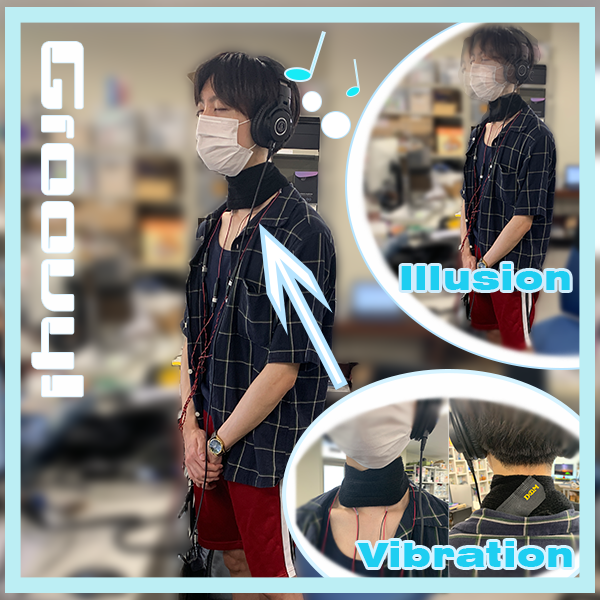
- 音楽体験における運動錯覚を用いたノリ動作提示
〇成田 叡賦(電気通信大学)、中山 翔太(電気通信大学)、真鍋 光希(電気通信大学)、牛山 奎悟(電気通信大学)、田中 叡(電気通信大学)、溝口 泉(電気通信大学)、梶本 裕之(電気通信大学) - 音楽に合わせて触覚刺激を提示することで音楽体験が向上することが知られている. 我々は, さらに音楽体験の中で身体を揺らす「ノリ」の動作に着目した. 振動刺激による運動錯覚を利用し, この身体が揺れる感覚を提示することで音楽体験の向上を試みた. 本稿では, 複数の部位に対し運動錯覚による揺れる感覚を生起させ, 音楽体験への印象変化を調査することで提案手法の基礎的検討を行なったことを報告する.
- 2G-24
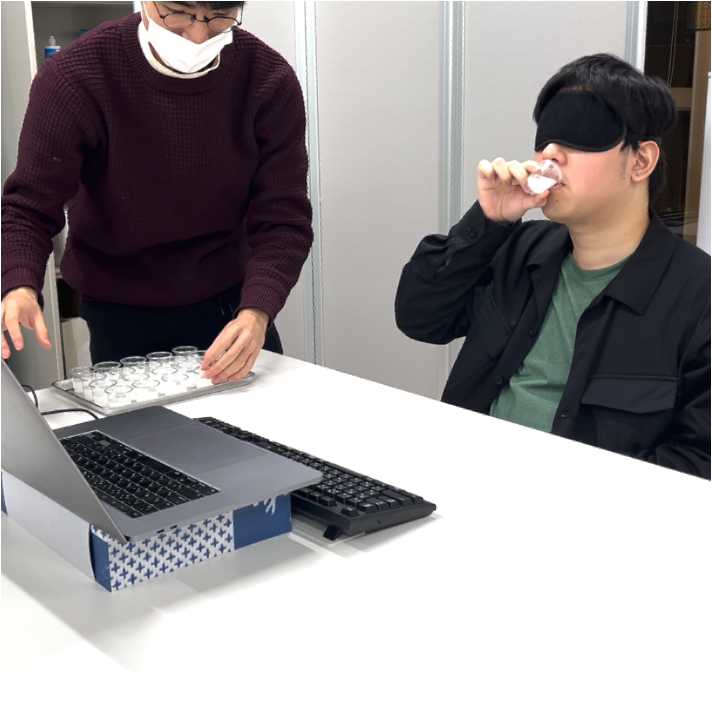
- 飲料飲用の過程に応じた糖度制御による味知覚変化
〇日塔 諒太(東京大学)、伴 祐樹(東京大学)、福井 類(東京大学)、割澤 伸一(東京大学) - 連続して同じ味を知覚するとき順応と馴化に伴い知覚する味の強さが減衰することが知られている.しかし,食品の摂取過程に応じて感覚刺激を変動させたときにどのように知覚が変動するかは明らかではない.本研究では,甘味飲料を連続して飲むときに糖度を下降または上昇させ,摂取過程ごとの知覚を評価させた.その結果,いずれの場合でも摂取過程の途中で一定の糖度提示に比べ甘味が強化されるタイミングがあることが判明した.
- 2G-25
- 下方視野を拡大したヘッドマウントディスプレイが食べやすさやクロスモーダル効果に与える影響
〇中野 萌士(奈良先端科学技術大学院大学)、Perusquia-Hernandez Monica(奈良先端科学技術大学院大学)、磯山 直也(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - HMDを装着したままの食事は下方向の視野角(下方視野)が限られており,口付近に視覚情報を提示できないため視覚変調による味覚操作のクロスモーダル効果や食べやすさを制限している. 我々は,鉛直下方向に光学系と魚眼カメラを追加し,口付近の視覚情報提示が可能なビデオシースルー型下方視野拡大HMDを開発した. 実験の結果,下方視野の拡大は食べやすさを向上させるがクロスモーダル効果には影響を与えないことが明らかになった.

- 2G-26
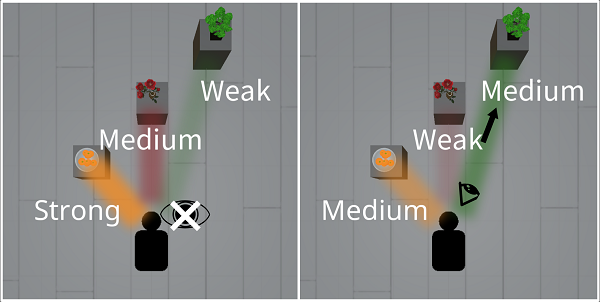
- VR空間での香りの弁別感創出のための選択的注意の設計
〇伊藤 孝紘(東京大学)、胡 献引(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - VR空間において複数の香りを提示する場合,人間は香りをまとめて認識するため弁別が難しい.これまでの研究で,視線に基づく選択的注意によりVR空間で自身から等距離にある複数香りの弁別感が向上することが明らかになっている.本研究では香り源が自身から異なる距離に配置された状況に対応するため,視線及び距離に基づいた選択的注意によって香り強度を変更する手法を開発し,評価実験を通じてその有効性を確かめた.
- 2G-27
- 顎部電気刺激による辛味の増強効果
〇大野 雅貴(東京大学学際情報学府)、青山 一真(東京大学先端科学技術研究センター)、雨宮 智浩(東京大学大学院情報理工学系研究科)、葛岡 英明(東京大学大学院情報理工学系研究科)、鳴海 拓志(東京大学大学院情報理工学系研究科)
- 2G-28
- 発表取り消し