Sept. 19 2025
9月19日
口頭発表 09:10-9:50 ロボット・センサ・アクチュエータ
座長:嵯峨 智(熊本大学)
- 3B1-01
-
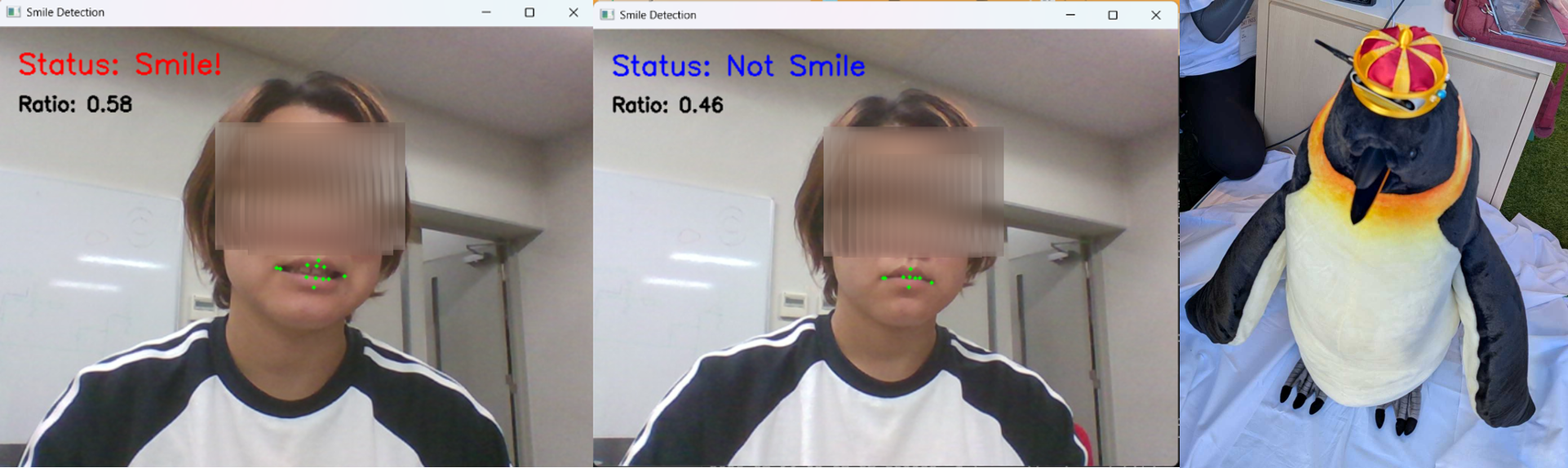
笑顔検出による感情共有インタラクションが子どもとロボット間の関係性に与える影響
〇木村 江梨花(奈良先端科学技術大学院大学)、秋吉 拓斗(奈良先端科学技術大学院大学)、澤邊 太志(奈良先端科学技術大学院大学) - 家庭用ロボットの普及が進み,特に子どもとの共生が重要となる一方,彼らとの関係を育む効果的なインタラクション手法は十分ではない.本研究は,子どもがロボットと自然に関わるための非言語的な手がかりとして「笑顔」に着目する.子どもの笑顔をロボットが認識し,喜びのフィードバックを返すことで感情を共有するシステムを構築する.これが両者のつながりに与える影響を検証し,子どもとロボット間の結びつきの強化を目指す.
- 3B1-02
-
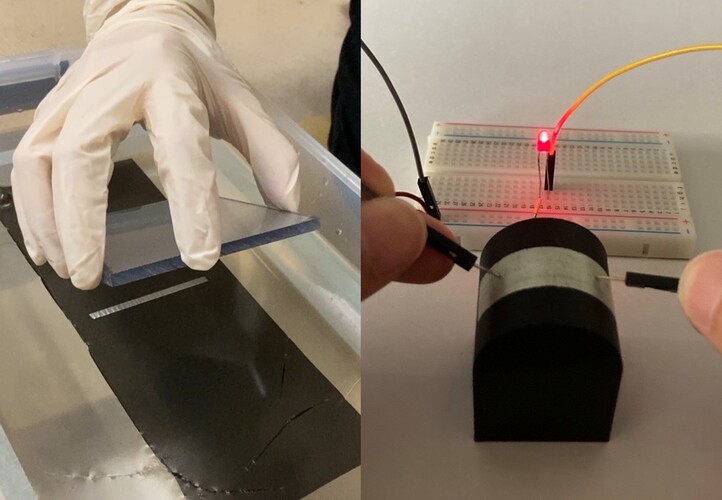
漆回路のための水圧転写技術と箔押しを組み合わせた配線手法の検討
〇今西 三四郎(筑波大学 システム情報工学研究群)、橋本 悠希(筑波大学 システム情報系) - 本研究では,湾曲面への漆回路実装を可能にするため,水圧転写技術と箔押しを組み合わせた配線手法を提案する.漆と電子回路を組み合わせた漆回路は,配線手法の制約により,お椀やお盆の淵のような湾曲面への実装は困難であった.加えて,漆回路に求められる熱・紫外線・応力を用いず,安全な湾曲面配線手法も未開発である.そこで本研究では,容易に配線が可能な箔押しと,水圧を用いて複雑な形状に模様を転写できる水圧転写技術を組み合わせることで湾曲面への配線を可能にし,より多様な対象物への漆回路の実装を目指す.本発表では,この手法の実現可能性と有効性について検証した結果を報告する.
- 3B1-03
-
飴を用いた単一コーナーキューブ構造の再帰性反射材の作成と評価
〇久保 なつみ(群馬大学)、奥 寛雅(群馬大学) - 動物にモーションキャプチャを行う際、従来のマーカーは健康被害のリスクがあるため、その解決のために可食マーカーを提案し、安全な手法の実現を目指す。先行研究では飴製再帰性反射材を多面体構造にすることで全方向の再帰反射を実現したが、実用性に課題が残った。そこで本研究では別構造として、コーナーキューブ1素子の飴製再帰性反射材を試作し、再帰反射することを確認した。さらにマーカーとしての応用可能性も検討した。

- 3B1-04
-
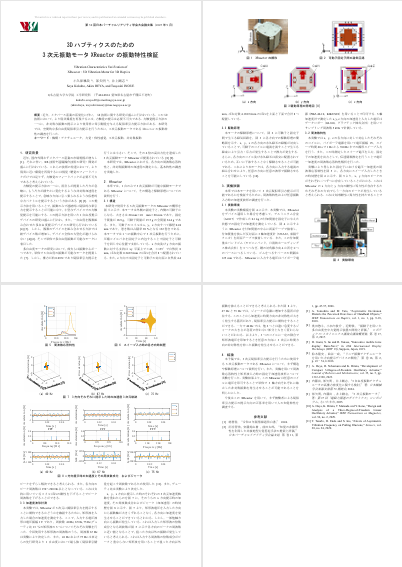
3Dハプティクスのための3次元振動モータXReactorの振動特性検証
〇小久保 颯哉(名古屋大学大学院)、部矢 明(名古屋大学大学院)、井上 剛志(名古屋大学大学院) - 近年,メタバース産業の活発化に伴い, XR技術に関する研究が盛んに行われている.このXR技術において,より現実環境を再現するには,力触覚の提示は必要不可欠である.力触覚提示方法の一つに,非対称な振動の提示により使用者に牽引錯覚を与える疑似牽引力提示方法がある.本研究では,空間的な多自由度疑似牽引力提示を行うために,3次元振動モータであるXReactorの振動特性の調査を行った.
- 3B1-05
-
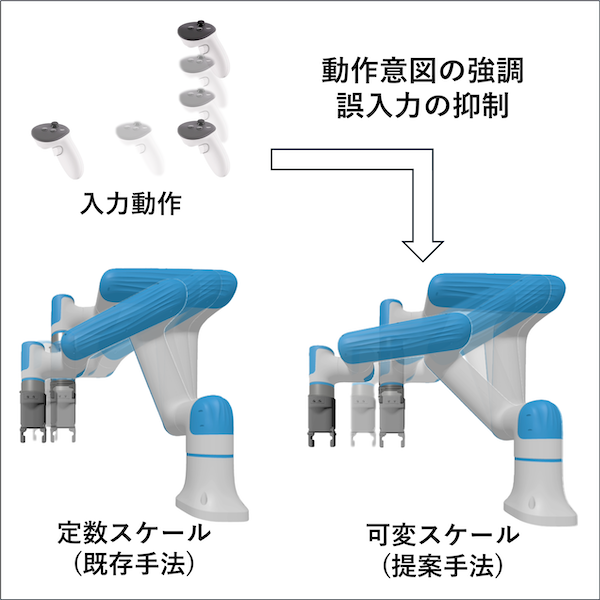
遠隔ロボットアームシステムにおける動作特徴に基づく可変制御
〇筒井 秀斗(名古屋大学)、渡辺 圭貴(名古屋大学)、浦野 健太(名古屋大学)、米澤 拓郎(名古屋大学)、河口 信夫(名古屋大学未来社会創造機構) - これまでにVR空間を通じた遠隔ロボットアーム操作システムは数多く研究されており,コントローラの姿勢をロボットアーム先端の姿勢に連動させる操作手法が提案されている.しかし,VR遠隔操作システムは依然として一般に普及しておらず,実用化にはより直感的な操作が可能な仕組みが求められている.本研究では,姿勢差分入力の特徴に着目したロボットアームの先端姿勢の可変制御により,ユーザビリティ向上を目指す.
- 3B1-06
-
広帯域非対称振動刺激の提示・評価可能な機械式機構の提案
〇板野 凌太(大阪大学)、古川 正紘(大阪大学、脳情報通信融合研究センター)、前田 太郎(大阪大学、脳情報通信融合研究センター) - 従来デバイスは評価可能な振動周波数範囲に差異があり、牽引力錯覚に最適な周波数に関する統一見解は未だ確立されていない。 そこで、ギヤと錘で構成された非対称振動提示装置を提案する。この装置は固有周波数に依存する振動子では出力が難しい広帯域の振動刺激を錘の変更により個別に提示、評価が可能であると考える。本稿では装置の設計を示し、実現振動周波数に対する刺激効果量を試算した。
- 3B1-07
-
安定把持を実現するテレロボット用マイクロフォースプレートの開発
〇柚 空翔(立命館大学)、街道 一翔(立命館大学)、安藤 潤人(立命館大学)、野間 春生(立命館大学) - 人は物体を持つ際に、指先の接触面で感じる力覚から多くの情報を得ることで器用に持ち上げている。ロボットにも同様の感覚を与えることを目指し、ハンドの指先に取り付け可能で3軸の力が計測可能な機器として、4つの超小型MEMS触覚センサで構成した10mm×9mmのマイクロフォースプレートを開発した。これにより、接触面に加わる圧力や剪断力、回転モーメントを取得可能であり、テレロボットにおける安定把持への有効性を確認した。
- 3B1-08
-
気圧センサを用いた生活環境活動記録に関する基礎的実験(その2)
〇新居 英明(慶應義塾大学)、小林 康平(武蔵野美術大学)、吉田 貴寿(慶應義塾大学)、南澤 孝太(慶應義塾大学) - 以前の研究で部屋に設置した気圧センサを用いてドアの開閉、窓の開閉などを検出できること、また人の移動を手持ちの気圧センサとの相関を用いて検出する方法を検討してきた。今回はビルではなく、一般家屋において、このシステムを用いることで生活環境の様子を取得できないか検討した。その結果、家屋内の人の動きと共に建物の外の動きなども計測できたので、そのデータを共有したい。

- 3B1-09
-
空間知能化ロボティクスに基づく身体動作支援プラットフォームの基礎検討
〇太田 雅啓(東京大学、慶應義塾大学)、吉田 貴寿(慶應義塾大学)、佐々木 智也(東京大学、慶應義塾大学、東京理科大学)、森田 迅亮(慶應義塾大学)、新居 英明(慶應義塾大学)、南澤 孝太(慶應義塾大学) - 生活空間にロボティクスが統合されたロボティックルームは,ユーザーの状態や行為に応じて動的に反応する環境を実現する,空間知能化に向けた有望なアプローチである。<#%BR%#>そこで本研究では,空間知能化の考え方に基づいて,様々な身体性を有するユーザの動作支援を行うプラットフォームROomBOTを提案する.ROomBOTはケーブル駆動パラレルロボットのペイロードと速度を活かしてユーザーの位置・意図に適応し,物体操作の支援の実現を目指す.本稿では本システムの設計原理と試作したプロトタイプを示し,応用例と初期評価結果を報告する.
- 3B1-10
-
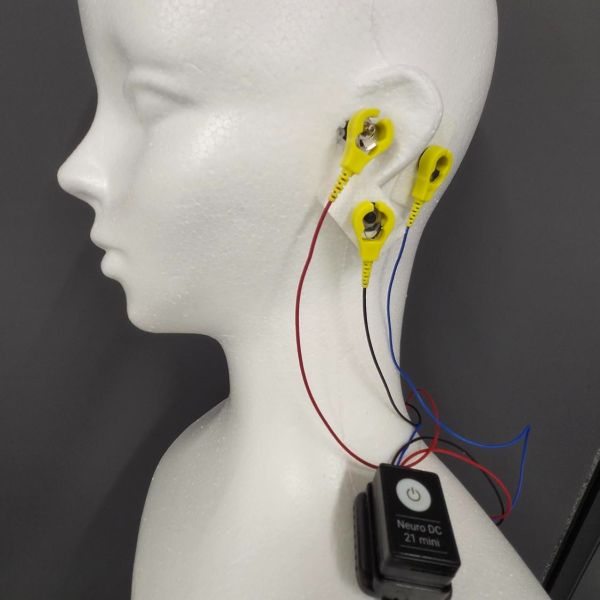
単一チャンネルによる片耳内部脳波計測の基礎評価
〇伊藤 月雲(富山県立大学大学院 工学研究科)、崔 高超(富山県立大学 情報工学部)、唐山 英明(富山県立大学大学院 工学研究科) - 近年,従来の頭皮部からの脳波計測に代わり,簡便な計測を可能にする耳内部脳波の研究が行われている.耳内部脳波計測デバイスの普及には電極数や装着位置の単純化が不可欠であると考えられる.本研究では,片側耳内部とその周辺のみに電極を装着した状態でのシンプルな単一チャンネル脳波計測システムを提案し,その基礎評価を実施した.実験では開閉眼課題を行い,結果として基礎律動に有意差が認められた.