Sept. 18 2025
9月18日
口頭発表 09:50-10:30 力覚・体性感覚2
座長:昆陽 雅司(東北大学)
- 2F2-01
-
爪近傍と指先への電気刺激による多自由度力覚提示(第二報) 爪近傍の刺激による影響の調査
〇秋葉 優馬(電気通信大学)、溝口 泉(電気通信大学)、梶本 裕之(電気通信大学) - 本研究は、爪周辺の機械的ひずみが指先の力覚に関与しているという事実に着目し、多自由度の力覚提示を実現する手法を提案するものである。提案手法では、指先全体、特に側面や爪周囲に電気刺激を加えることで、力覚を提示する。我々は、爪周囲への刺激が力知覚に与える影響を検証し、提案手法が多自由度の力覚提示に有効であることを確認した。結果として、爪周囲の刺激が力感覚生成に重要な役割を果たすことが明らかとなった。
- 2F2-02
-
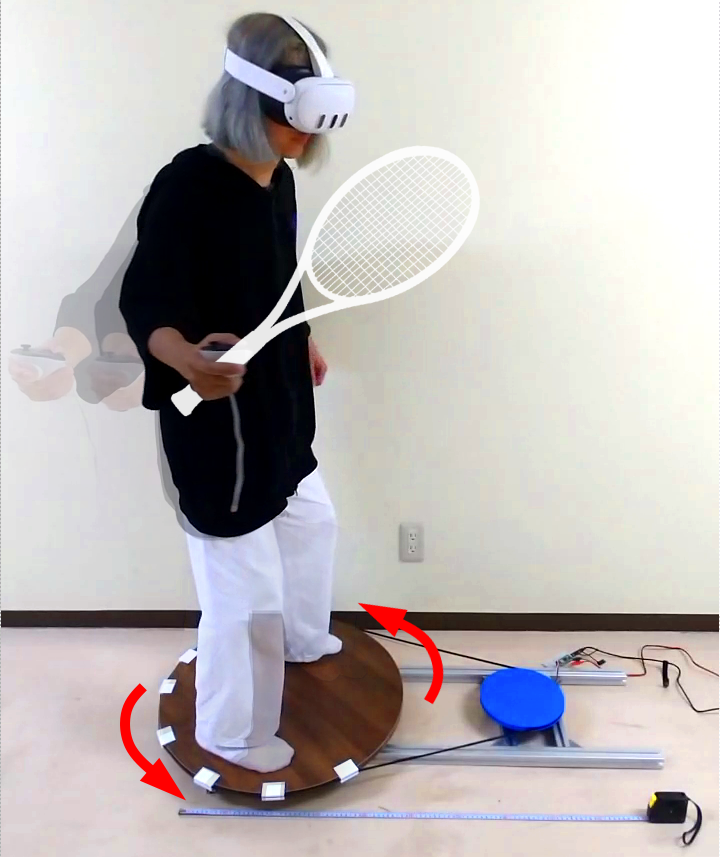
地面に設置したターンテーブルによる打撃感の提示
〇島田 睦生(電気通信大学)、溝口 泉(電気通信大学)、梶本 裕之(電気通信大学) - これまでの打撃感提示の研究では装着型や把持型デバイスを用いて手に衝撃を提示してきた。しかし、打撃時の反力は、手に加わるのみならず、身体を経由し最終的には足と地面の間にも生じる。この物理的性質を利用すれば、足への反力提示により打撃感が増強されると考えられる。本報告では設置型デバイスとしてターンテーブルを用い、ユーザーがその上に立ち、打撃動作の瞬間にターンテーブルを瞬間的に回転させることで足元の反力を提示し、打撃の臨場感を向上させる手法を検証する。
- 2F2-03
-
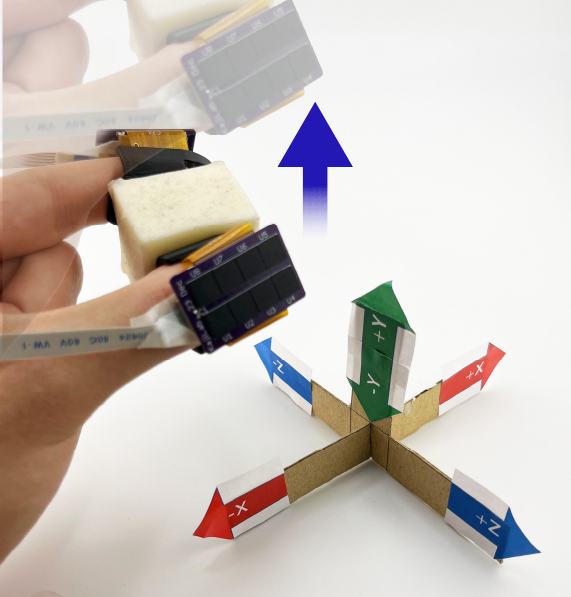
Virtual Joint: 皮膚伸長による拡張身体の動作に対応する体性感覚フィードバック
〇高下 修聡(東京大学)、Jürgen Steimle(ザールラント大学)、稲見 昌彦(東京大学) - 尻尾や追加肢の基部などの視認しがたい拡張身体部位に対し、視覚に頼らずに体性感覚をフィードバックする手法が望まれている。本研究では、拡張身体の基部にその動作に<#%BR%#>対応した皮膚変形を与えることによって、単なる情報のマッピングに留まらない、より「自然に」感じられる拡張身体に対する体性感覚フィードバックを提案する。
- 2F2-04
-
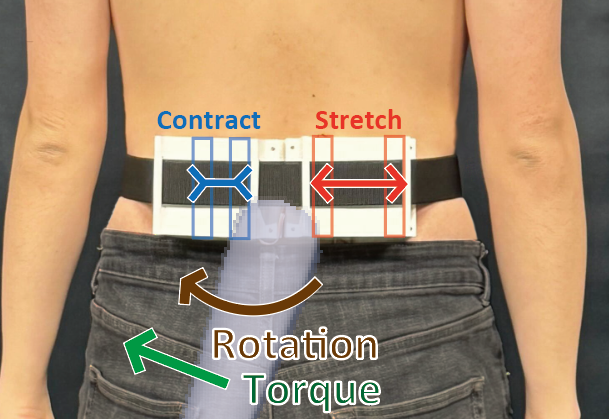
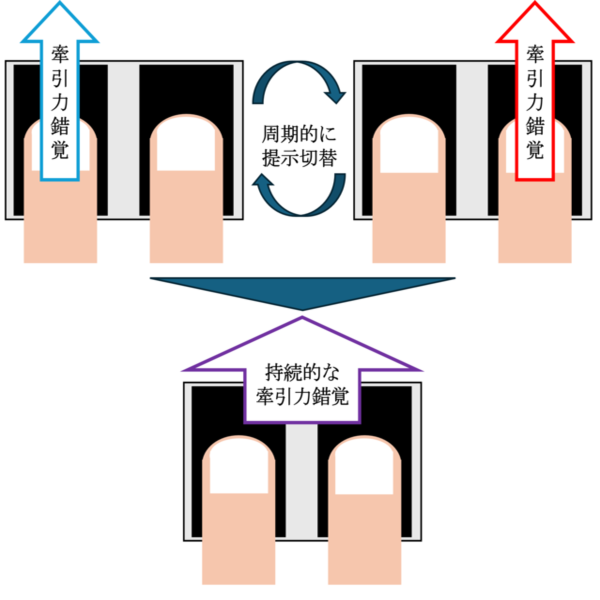
隣接する二指への交互刺激による牽引力錯覚の順応抑制手法の開発
〇伊藤 天翔(筑波大学)、田辺 健(国立研究開発法人産業技術総合研究所)、家永 直人(筑波大学)、黒田 嘉宏(筑波大学) - 非対称振動により力覚を生起可能な牽引力錯覚は、歩行者の経路誘導や動作教示への活用が期待されている。しかし、順応により牽引力錯覚の知覚が低下するため、長時間の安定提示に課題が残る。本研究では、隣接する二指へ交互に牽引力錯覚を提示することで、順応を抑制しつつ連続的に一方向へ牽引される感覚を生起する手法を提案する。本発表では連続的な錯覚提示時の順応と比較し、手法の有効性を確認した結果について報告する。
- 2F2-05
-
半姿勢・半拘束状態における胸筋トレーニングバーの曲げやすさ知覚
〇朱 傑(広島市立大学)、脇田 航(広島市立大学) - ユーザの手を半姿勢・半拘束した状態において胸筋トレーニング用の器具(アームバー)の曲がりやすさを変更・知覚可能なシステムを提案する。具体的には、アームバーが中間状態で曲がったままのデバイスに対し、ユーザの力に応じてバーチャル空間上のアームバーの曲がり具合を変えることによって、アームバーの硬さを呈示する。力入力ー視覚による位置出力によるクロスモーダル効果によって、アームバーの曲げやすさを錯覚させる。
- 2F2-06
-
周期的な力覚フィードバックによる下肢の運動学習の支援効果の基礎評価
〇高田 崇天(筑波大学)、ハサン モダル(筑波大学)、蜂須 拓(筑波大学) - 運動学習では学習者が自身の身体動作を正確に把握することが重要であり,この把握を促進する感覚的手がかりの提供が求められている.本研究では,膝関節の運動学習の支援を対象に,関節の屈伸動作に同期した周期的な力覚フィードバック(カチカチ刺激)を提示するウェアラブルデバイスの設計・開発に取り組んできた.本稿では,開発したデバイスが運動学習に及ぼす効果を評する実験について報告する.

- 2F2-07
-
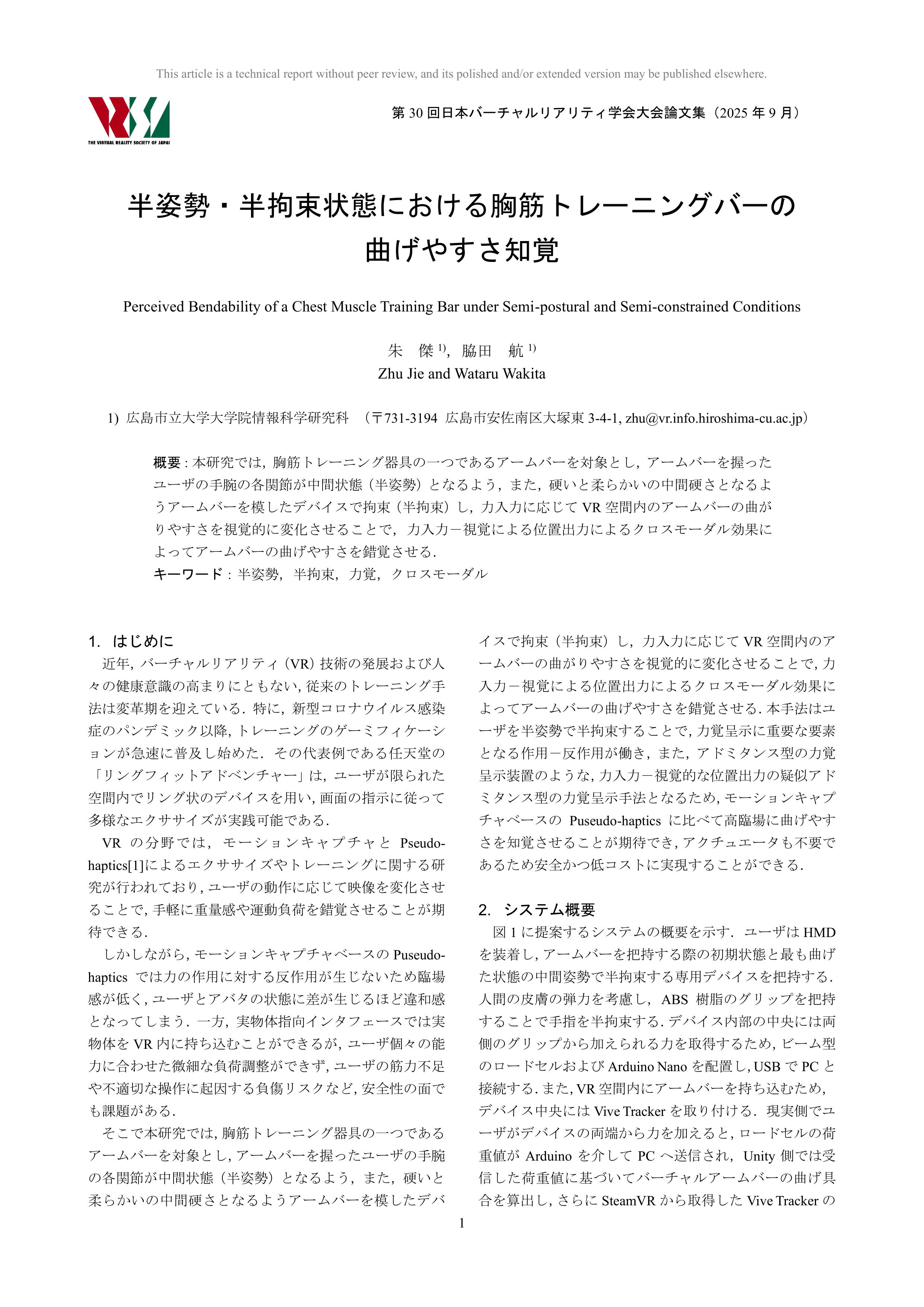
転がり2軸モーションベースにおける 持続的な加速度知覚の検討
〇副野 隼平(広島市立大学)、脇田 航(広島市立大学) - モーションベースによる加速度呈示の際,大きな加速度が持続するような状況において,目標加速度のスケールを縮小せずにアクチュエータの加速度と重力の分力による合成加速度を目標加速度に近づけることは困難である.本研究では,転がり2軸モーションベースを用い,急ブレーキ時における合成加速度の知覚について検証した.その結果,アクチュエータによる加速度の立ち上がりが速いほど急ブレーキ感が増すことが明らかとなった.
- 2F2-08
-
半姿勢・半拘束型力触覚インタフェース
〇加藤 聖人(広島市立大学)、脇田 航(広島市立大学) - 本研究では,手指の関節を中間姿勢で半拘束し,手指の力入力と視覚的位置出力で力触覚を錯覚させる半姿勢・半拘束型力触覚インタフェースを提案する.手始めに,指を半拘束した状態で,手指からの力入力に基づき手首の位置と指の把持動作を推定し,視覚呈示によって多様な力触覚の表現を試みた結果,力入力に応じた位置変化を視覚的に呈示することで,疑似的なアドミタンス型の力覚呈示を実現できた.
- 2F2-09
-
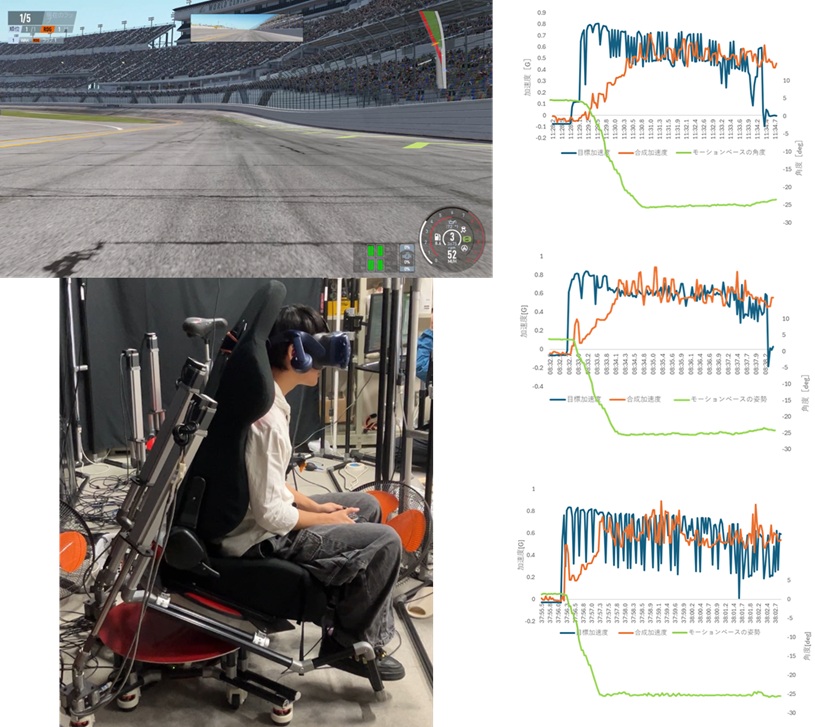
非接地二指把持型力覚提示装置による大型VR物体形状知覚
〇佐々木 洋人(筑波大学)、矢野 博明(筑波大学) - 本研究では,非接地型の道具媒介型力覚提示装置による大型VR物体の形状提示手法を提案する.装置は3自由度のハンドヘルド型力覚提示装置と光学式位置姿勢計測システムから成る.ユーザは効果器を親指と人差し指でつまみ,手全体をVR物体の表面に沿って動かすことで物体に触れたときの反力が提示される.これによりユーザはそこに物体面が存在するように認識する.3次元物体形状提示実験を行い,提案手法の有効性を検証した.
- 2F2-10
-
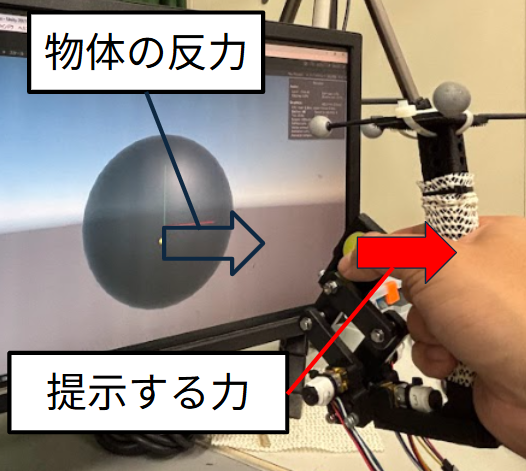
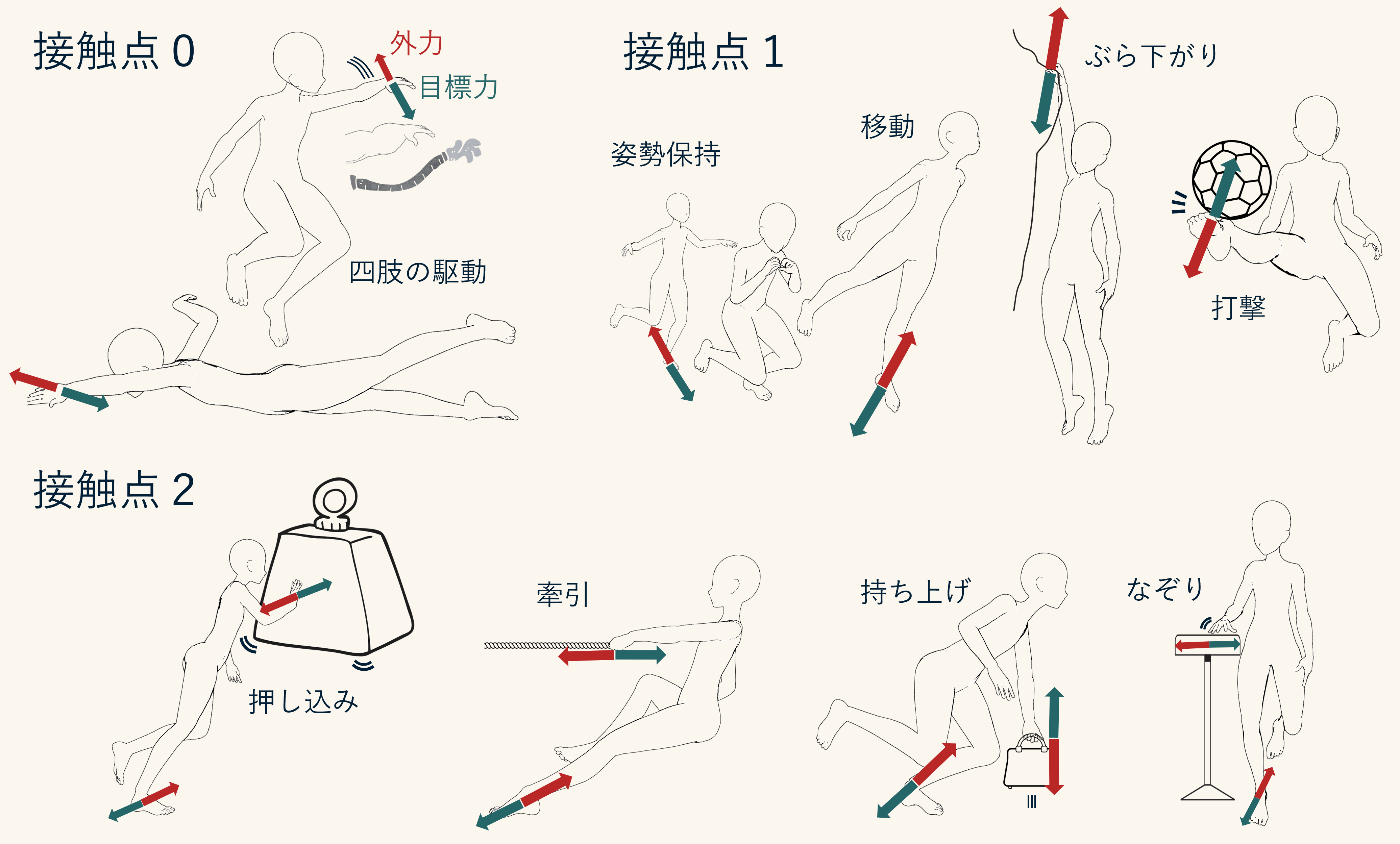
ユビ:指先力入力システムによる環境と全身の力相互作用の実現
〇平尾 悠太朗(奈良先端科学技術大学院大学)、橋本 健(ソニーコンピュータサイエンス研究所) - 筆者らは指先の力をエンドエフェクタの目標点の運動へ変換し、逆運動学でアバタを動かすシステムを開発してきた。これに対し本研究では力入力を目標力に置き換え、逆動力学によって各関節トルクを算出し、起き上がりや歩行など環境との力の相互作用を要する全身運動を実現した。この新しい操作方法を人が習得できるかを検証するため、歩行を題材に、強化学習で最適方策を学習し、それを人が模倣して制御する方法を探る。
- 2F2-11
-
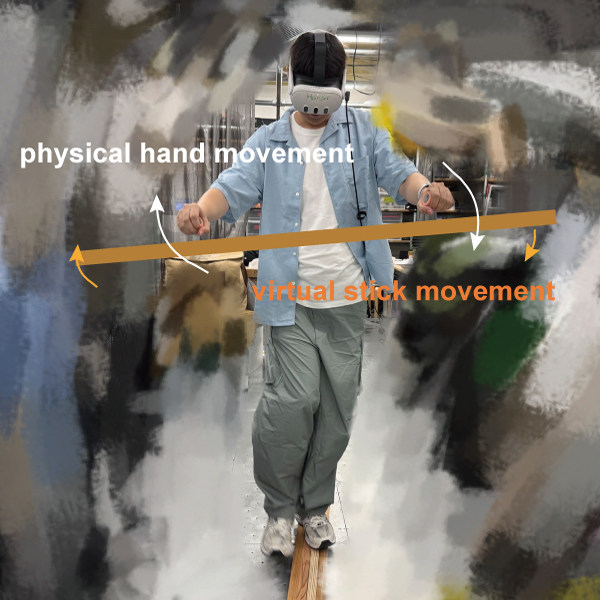
Pilot Study on Pseudo-Haptic Balance Feedback for Two-Handed Interactions by changing C/D Ratio
〇脇坂 崇平(慶應義塾大学大学院メディアデザイン研究科)、Haochen He(慶應義塾大学大学院メディアデザイン研究科)、Hoppe Matthias(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - We propose a two-handed pseudo-haptic interaction technique that induces a sense of balance or imbalance by asymmetrically manipulating the control-display ratios of hand movements, simulating differences in weight and resistance between the user’s body and the manipulated objects.