Sept. 17 2025
9月17日
口頭発表 09:30-10:10 教育・訓練1
座長:野間 春生(立命館大学)
- 1B1-01
-
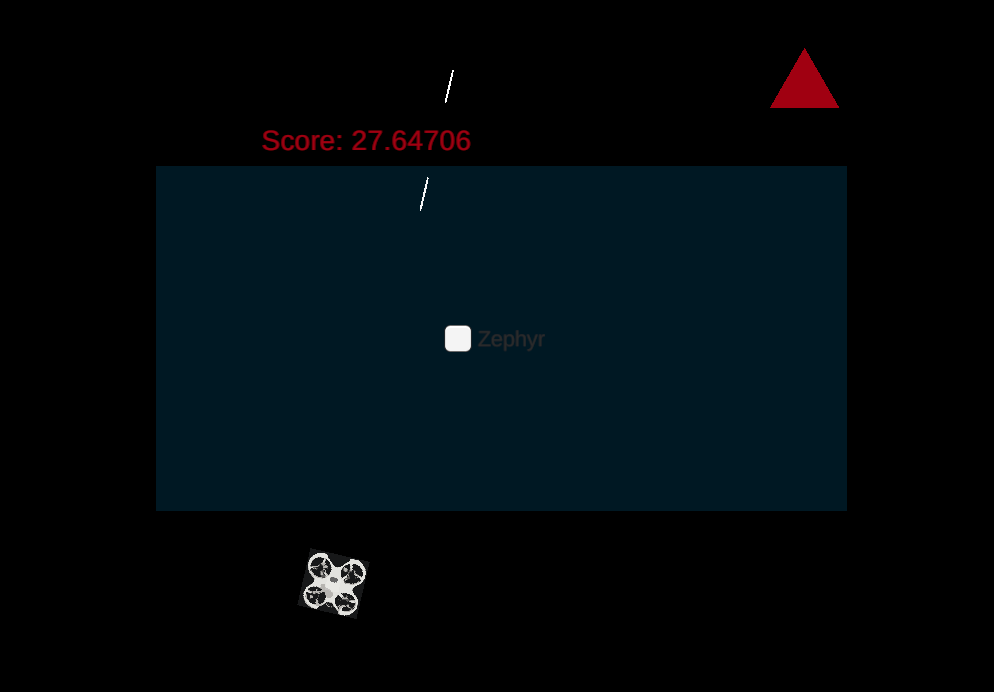
認知負荷理論に基づいたドローン操作練習用シミュレータの開発
〇檜垣 彰典(愛媛大学大学院医学系研究科)、宮部 亮(愛媛大学大学院医学系研究科) - 小型無人航空機(ドローン)は複数のロータが生み出す推進力により三次元空間を自由に移動することができるが, これにはスロットルによる高度操作に加えて, エレベータ, ラダー, エルロンによる3軸方向の回転の組み合わせが要求される. 初心者にとってドローン操作は直感的に理解しがたく習熟に時間を要することから, 我々は高度情報を簡略化して認知負荷を低減させる方法を考案した. 俯瞰視点での2Dドローンシミュレータである.
- 1B1-02
-
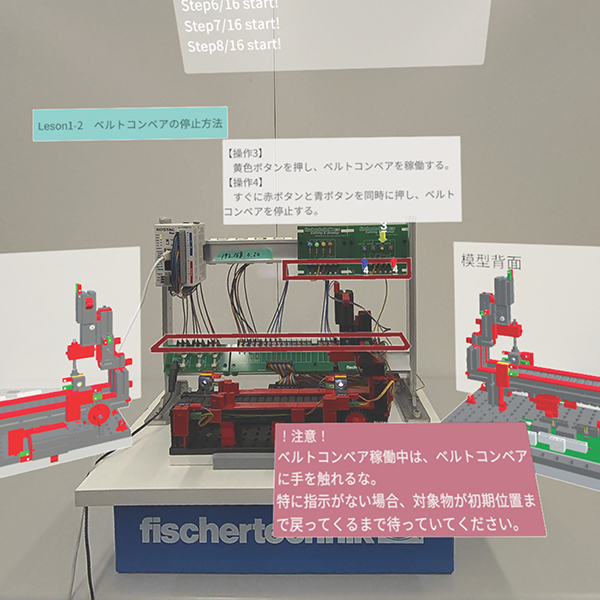
AR技術を活用した工場設備教育システムの試作と有効性検証
〇立川 智章(東京理科大学) - 製造業における人材教育を支援するため,AR技術を用いた工場設備教育システムを試作し,手順書,動画,ARの3手法を比較評価した.評価は被験者に対する事前アンケートと事後アンケートにより行い,理解度,危険意識,操作精度,学習時間,使用感などの観点で分析を行った.その結果,ARは理解度や危険意識や操作精度に優れ,教育効果の高さが示された.一方,学習時間や疲労感といった課題も明らかとなった.
- 1B1-03
-
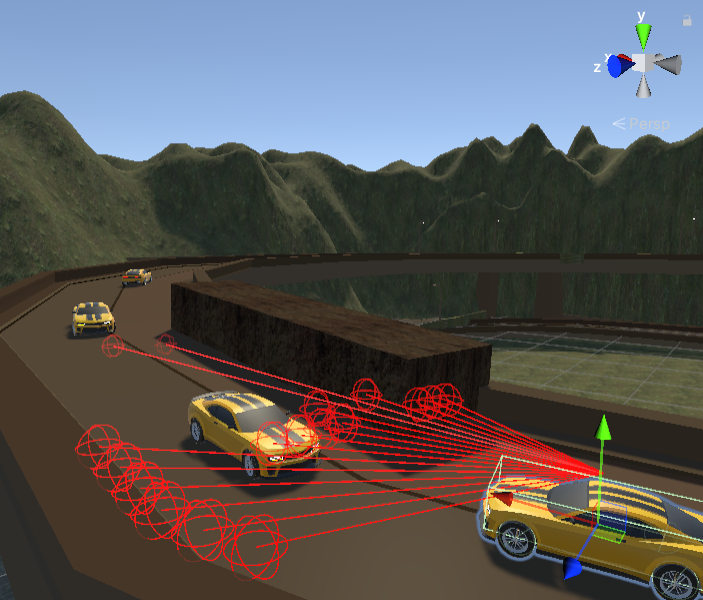
Unity ML-Agentsを用いた狭隘丘陵カーブ環境における車両間協調戦略の提案
〇増田 琉利(東海大学)、川西 保裕(東海大学)、水谷 賢史(東海大学) - 道路の老朽化や自然災害による通行制限が増える中、安全運転と効率的な協調行動が求められている。本研究では、Unity ML-Agents を用いた強化学習により、坂道・カーブ・狭路を含む複雑な環境における自動運転車の協調行動を実装し、報酬設計とセンサー角度の最適化を行った。成功率や衝突率に基づく定量評価の結果、障害物や対向車の検出精度が向上し、安定した協調行動が促進されることが示された。
- 1B1-04
-
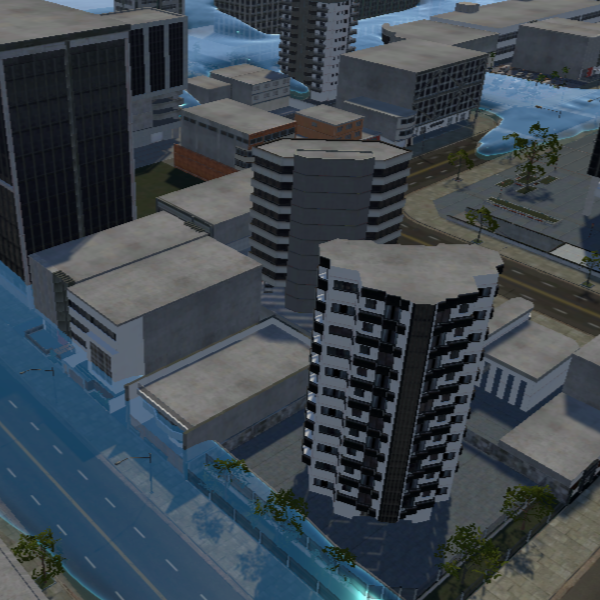
水害シミュレーションを用いたVR避難訓練システムの開発と防災意識の向上に関する評価
〇前田 陽光(福岡工業大学大学院)、石原 真紀夫(福岡工業大学大学院) - 近年,津波や地震などの自然災害が頻発する中,住民一人ひとりの防災意識の向上が重要となっている.本稿では,津波の浸水状況を再現する流体シミュレーションを用いたVR避難訓練システムを開発した.また,都市環境は自動生成された仮想空間上に構築し,ユーザが災害発生時の避難行動を体験できるよう設計している.避難体験後に実施したアンケートの結果から,本提案システムは防災意識の向上に効果があることが示された.
- 1B1-05
-
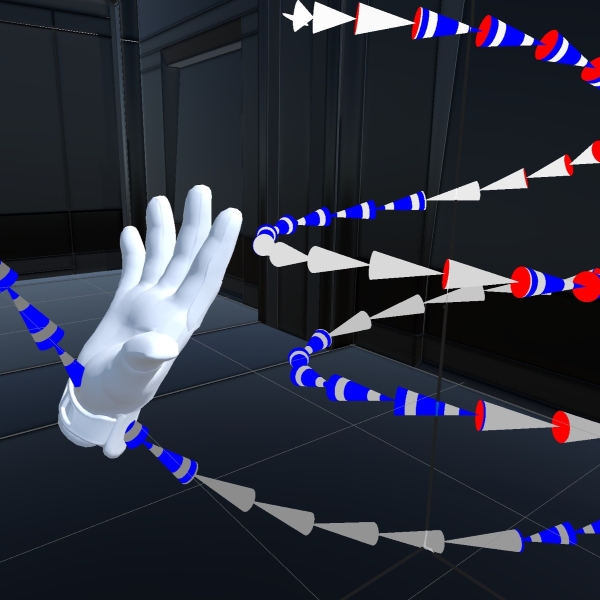
見本動作の軌跡を時空間トレース可能なVRダンス習得システム
〇伊藤 快登(横浜国立大学)、岡嶋 克典(横浜国立大学) - 従来の身体動作の学習方法は、淡々と進む見本を追うことで動作を理解する。この見本動作に関する空間と時間の同時処理が学習者に高い認知負荷を課し、効率的なスキル習得を妨げている。そこで、見本動作を軌跡と速さに分離して提示するVRシステムを提案する。学習者に動きの全体像の理解を容易にし、その構造を探索しながら練習できることが手の動作の学習に有用かを検証した。
- 1B1-06
-
Clusterを用いた遠隔授業における技術的課題の実践報告 :ハイスクールDXを事例として
〇玉井 香里(愛知産業大学 通信教育部) - 本発表では,ハイスクールDX事業におけるcluster(メタバースプラットフォーム)を活用した遠隔授業の初期導入に関する実践報告を行う.本実践では,端末スペックや通信環境,clusterの仕様などに起因する技術的課題に加え,遠隔教育特有の指導設計や,生徒の主体性・参与感の確保といった教育的課題が顕在化した.これらの課題に対して現場で試みた対応の一部を整理し,実践を通して得られた知見を踏まえて,メタバースを活用した教育実践の可能性と今後の展開について考察する.

- 1B1-07
-
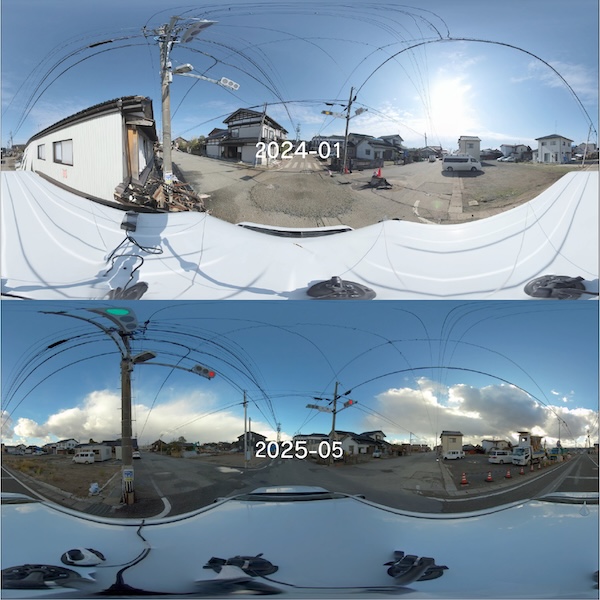
石川県珠洲市における全天球路上画像を用いた災害記録
〇大伏 仙泰(東京大学)、大津山 堅介(東京大学)、稲見 昌彦(東京大学) - 災害の被害や教訓の記録手段として全天球画像の利用が進められている。著者らは令和6年能登半島地震の発災後、被害記録を目的とする全天球路上画像の撮影を石川県珠洲市全域で4度行い、撮影画像をオンラインプラットフォーム上で公開した。また、発災後の経過を紹介する全天球映像を制作し、2024年6月及び2025年5月に開催された一般公開イベントにて展示した。今後は受容や活用方法に関する調査を進める予定である。
- 1B1-08
-
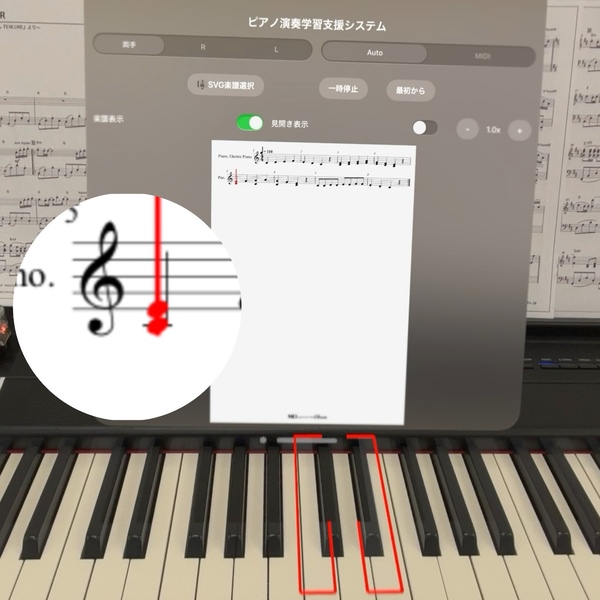
ピアノ演奏者の譜読み能力向上を目指したAR学習支援手法の設計と実装
〇和泉 慶乃佑(東北大学)、菅沼 拓夫(東北大学) - 本研究では、AR技術を用いたピアノ演奏学習支援システムを提案する。従来のピアノロール型支援は視覚的に直感的である一方、学習者が受動的になりやすく、演奏者の能力向上にはつながりにくいという課題がある。そこで、本研究では演奏者の譜読み能力向上に着目し、習熟度に応じてAR支援を段階的に減少させる手法を導入し、練習効率の改善効果を比較実験により検証する。これにより、演奏者の自立的学習と譜読み能力の向上を目指す。
- 1B1-09
-
VR環境を用いた和太鼓練習支援システムの提案とモチベーションへの影響評価
〇平谷 歩香(大阪大学)、中村 拓人(大阪大学)、千葉 直也(大阪大学)、浦西 友樹(大阪大学) - 和太鼓の大人数演奏では音だけでなく動きの統一も重要だが、練習相手の不在や騒音、楽器の持ち運びの困難さから、手軽に練習するのは難しい。そこで本研究では、複数のアバターと共に練習可能なVR和太鼓環境を構築し、実演に近い状況での練習を実現する。また、練習相手の有無が練習者のモチベーションに与える影響について検討する。

- 1B1-10
-
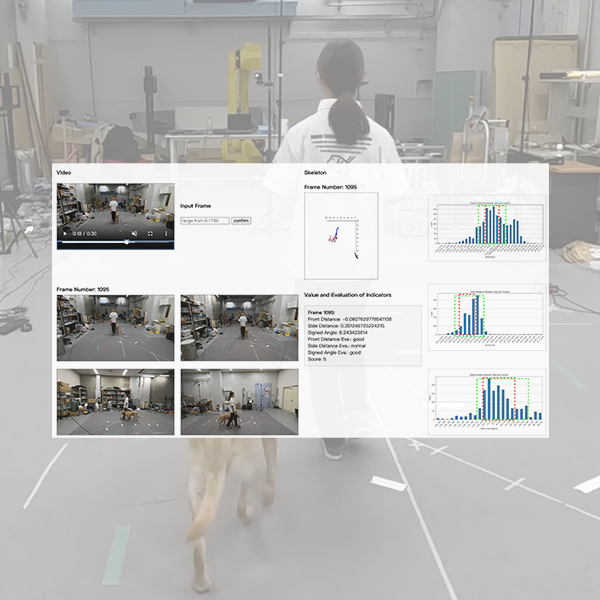
Visual Feedback and Evaluation System for Analyzing Guide Dog Condition Based on 3D Pose Features
〇黄 抒謡(東京大学)、王 安晟(東京大学)、牧野 泰才(東京大学)、篠田 裕之(東京大学) - This study proposes a method to help trainers observe guide dogs' condition and attention level on a frame-by-frame basis in a visual feedback interface. An evaluation system using spatial features derived from 3D skeleton reconstruction is constructed.
- 1B1-11
-
VR緊急走行映像を用いた交通場面ごとの運転スキル評価と振り返りの予備検討
小村 太一(兵庫県立大学)、井上 草太(兵庫県立大学)、山口 晋吾(姫路市消防局)、永田 昌平(姫路市消防局)、〇山添 大丈(兵庫県立大学) - これまでに我々は,VR緊急走行シミュレータの開発を進め,消防署における運転データの取得とその運転経験の違いによる運転行動の差異に関する分析を進めてきたが,実際の運転スキル自体の評価はできていなかった.本稿では,運転スキルに基づく運転行動の分析に向けて,その予備検討として実施した走行映像を用いた運転スキル評価の予備実験結果を報告する.
