Sept. 19 2025
9月19日
口頭発表 09:50-10:30 テレプレゼンス
座長:小池 崇文(法政大学)
- 3B2-01
-
裸眼立体視ディスプレイを用いたバーチャルバックミラーシステムの提案
〇篠原 七海(明治大学)、三武 裕玄(明治大学) - 本研究ではソーシャルVR内における他者の存在感を自然に提示する手法として,裸眼立体視ディスプレイを用いたバーチャルバックミラーシステムを提案する.鏡という日常的なメタファーに着目し,ディスプレイにVR空間が反射して映り込んでいるかのように提示することで,現実空間にVR空間が重なって存在するような視覚体験を実現する.これにより,VR空間内の他者がユーザと同じ空間に存在しているような感覚をもたらすことを目的としている.予備的な印象調査を通じて,本手法がHMDに依存しないPC作業と両立可能なソーシャルプレゼンス提示手法として有効である可能性が示唆された.

- 3B2-02
-
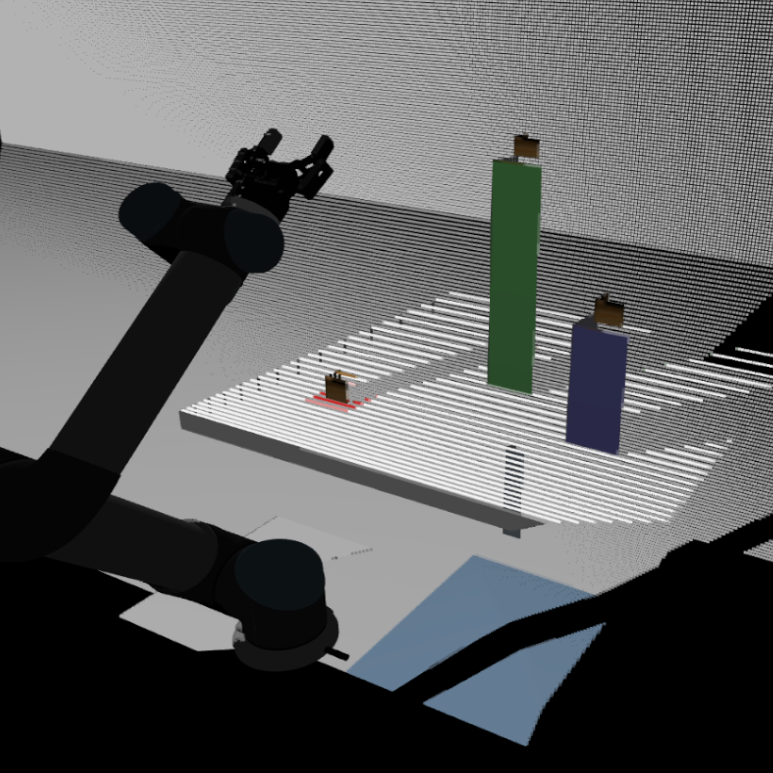
ヘッドマウントディスプレイを用いた遠隔操縦システムの提案と仮想空間における評価
〇田窪 渓太(防衛装備庁 陸上装備研究所)、上村 圭右(防衛装備庁 陸上装備研究所) - 災害現場等の人が立ち入って作業を実施することができない環境における車両とそれに付随する作業装置の遠隔操縦を実現すべく,それらをHMDによって遠隔操縦するシステムを構築した.シミュレーションを用いた検証により,従来の遠隔操縦方法であるディスプレイによる操縦と比較して3次元点群とHMDによる操縦システムの利点及び改善点を確認した.また,主観的な評価手法により認知負荷等の計測も実施した.
- 3B2-03
-
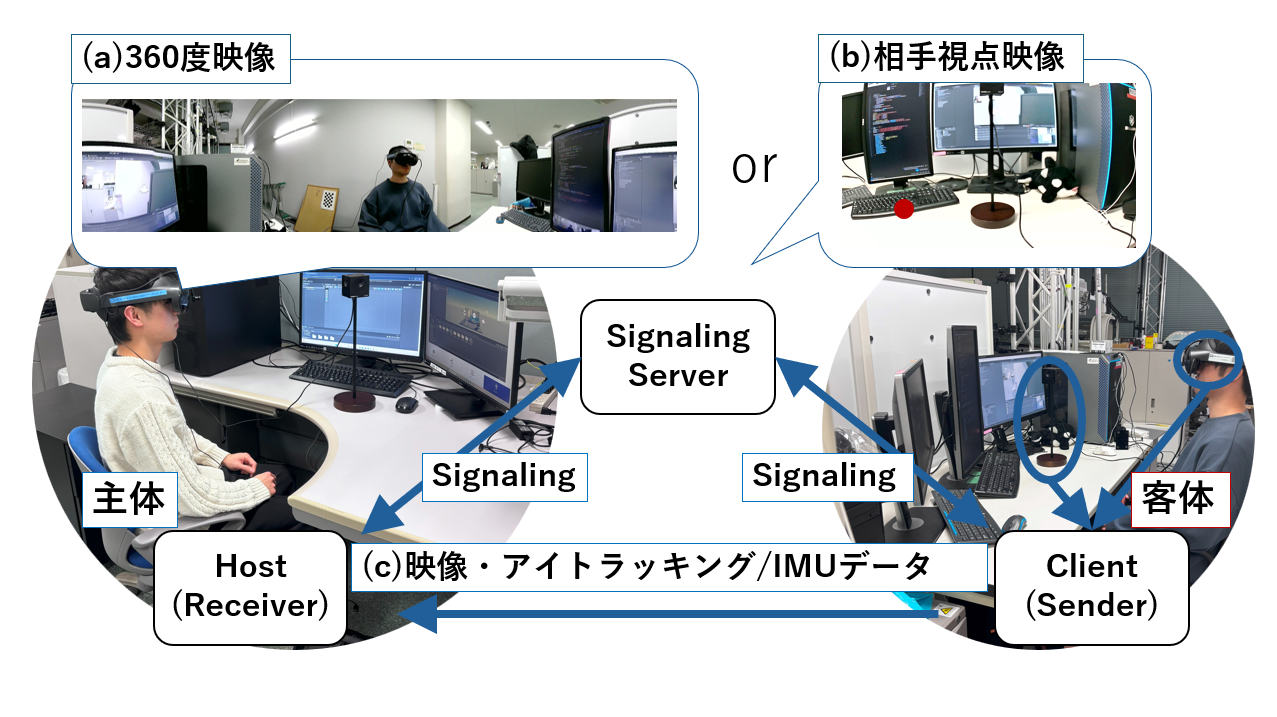
視点取得可能な実写映像に基づく没入型テレコミュニケーションに関する検討
〇宍戸 海(筑波大学)、謝 淳(筑波大学)、井上 雅彦(鳥取大学)、北原 格(筑波大学) - 従来のビデオコミュニケーションはカメラの視野が固定かつ狭く、相手の意図や感情、状況理解が困難である。本研究では360度カメラとHMDを組み合わせた没入型遠隔コミュニケーションシステムを開発し、周囲環境と相手視点の両方を提示することで包括的理解の実現を目指す。実験では従来システムと比較して身体動作の視認性と感情理解の有意な向上が確認された。このシステムは遠隔教育や協働作業への応用が期待される。
- 3B2-04
-
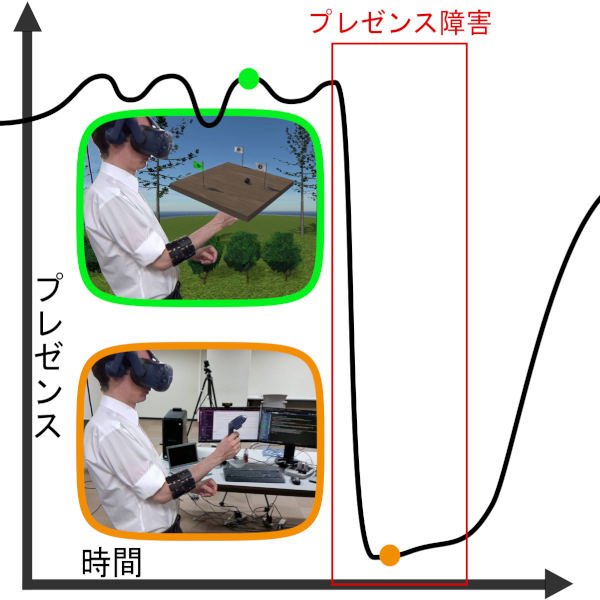
VR体験中に起こるプレゼンス障害の連続的な評価
〇シルム ヨハネス(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、平尾 悠太朗(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - 一般に「臨場感」とも呼ばれる「プレゼンス」は,VRの重要な指標である.本研究では,VR体験が終わった直後にその体験の録画を再生し,実物のスライダを持たせたユーザに体験を振り返らせて連続的にプレゼンスを評価させている.このデータからは,プレゼンスが一時的に著しく低下する「プレゼンス障害」が発生するタイミングを特定できる.実験の結果,プレゼンスのPIとPsiという2つの次元に亘って,障害の強さの順位が分かった.
- 3B2-05
-
VR 空間における他者アバターの存在が課題遂⾏に与える影響
〇田鍋 敦希(早稲田大学)、河合 隆史(早稲田大学) - VR 空間上での他者との共作業に着⽬し、VR 空間において他者の操作する共作業者アバターや操作されない共作業者を模したアバターが存在することが課題遂⾏に与える影響を客観指標と主観指標の両側⾯から探究した。結果として、客観指標からは差異は⾒られなかった。⼀⽅主観指標からは「VR空間上に存在するアバターは共作業者として認められる」ということが考えられた。

- 3B2-06
-
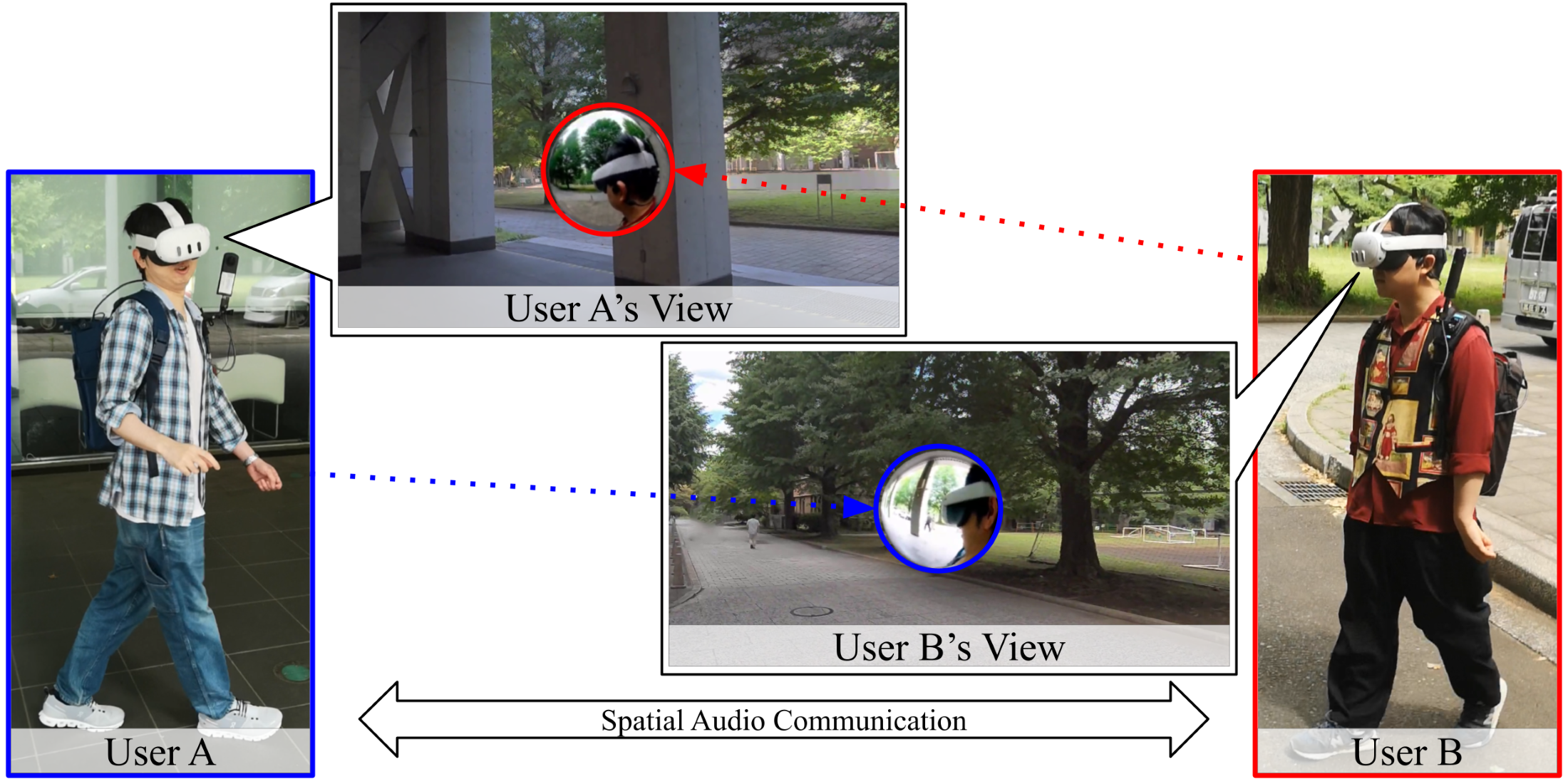
RemoteWalker:遠隔ユーザー同士で対称に歩行体験を共有しあうシステムの提案と基礎的ユーザースタディ
〇矢崎 武瑠(東京大学)、稲見 昌彦(東京大学) - 多くの屋外向け装着型テレプレゼンスシステムでは,ユーザー間の関係が非対称であり,相互に環境を共有しあうコミュニケーションの実現は難しい.本研究では,屋外にいる遠隔ユーザー同士がビデオシースルー型HMDと360度カメラを用いて,周囲環境や移動情報を対称に共有しながら歩行するシステムRemoteWalkerを提案する.また,基礎的ユーザースタディを通じて明らかになった有効性と課題について報告する.
- 3B2-07
-
手型ロボットアバタを用いた多形態テレイグジスタンス
〇佐々木 智也(東京理科大学、東京大学)、下林 秀輝(東京大学)、廣瀬 雅治(東京大学)、上田 陽太(東京大学)、吉田 英一(東京理科大学)、稲見 昌彦(東京大学) - 人間の手の巧みな動作の再現を目指し、物体操作の性能向上を目的としてロボットハンドが研究されている。一方で、ロボットハンドの多自由度系を利用して自律ロボットとする手型ロボットアバタが提案されている。本研究では、ヒューマノイドロボットの一部として機能する形態と、本体から分離して独立した手型ロボットアバタとして機能する形態を切り替えることで、複合的な身体を操作できるテレイグジスタンスシステムを提案する。

- 3B2-08
-
遠隔操作ロボットを利用した現実空間拡張コンテンツ「R-Metaverse」- 第4報 ー音声システムがソーシャルプレゼンスに与える影響の調査ー
〇錦織 勇飛(立命館大学大学院 情報理工学研究科)、BUI HUY HOANG(立命館大学大学院 情報理工学研究科)、細田 侑也(立命館大学 情報理工学部)、李 周浩(立命館大学 情報理工学部) - 遠隔操作ロボットを用いた新たなメタバース空間である,R-Metaverseにおいて,ロボットから参加するユーザの通話音声の出力方法がソーシャルプレゼンスに与える影響を検証した.スマホで参加するユーザが聞く通話音声として,以前までの手法であるヘッドホン出力に加えて,新たにロボットにスピーカーを取り付け,ロボット本体から音声が聞こえる場合の2条件を比較し,その効果を主観評価によって明らかにした.

- 3B2-09
-
分身ロボットを通じてバーガーショップで働く外出困難者の経験に関する質的調査
〇畑田 裕二(東京大学)、武内 一晃(株式会社オリィ研究所)、山﨑 洋一(神奈川工科大学)、吉藤 オリィ(株式会社オリィ研究所)、葛岡 英明(東京大学)、鳴海 拓志(東京大学) - 本研究では、東京のハンバーガーショップにおいて分身ロボットを通じて遠隔接客に従事する外出困難者(パイロット)の経験を調査する。パイロットと店舗の現場スタッフへのインタビュー調査を通じて、パイロットが現場スタッフや顧客と協調や関係構築を行うにあたって直面している課題を特定することで、テレプレゼンスロボットを通じた協働・社会参画のガイドラインについて考察する。

- 3B2-10
-
聴触覚共有型バイブロスケープによる存在感共有手法の基礎検討
〇沈 家宜(慶應義塾大学大学院メディアデザイン研究科)、彭 涵睿(慶應義塾大学大学院メディアデザイン研究科)、山村 風子(株式会社テレビ朝日)、香川 凌也(株式会社テレビ朝日)、横井 勝(株式会社テレビ朝日)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 近年、メタバースを介した遠隔コミュニケーションが注目されているが、映像やロボットなど、依然として視覚情報を用いたアバターの表現が主流である。本研究では、視覚情報を用いずに聴覚と触覚を用いた遠隔ユーザの存在感を伝達・共有する手法を提案する。ユーザの位置・頭部追跡システムと、空間音響と振動フィードバックを統合し、複数人に見えない存在感を共有させる聴触覚環境を実装し、公開展示においてフィードバックを得た。
- 3B2-11
-
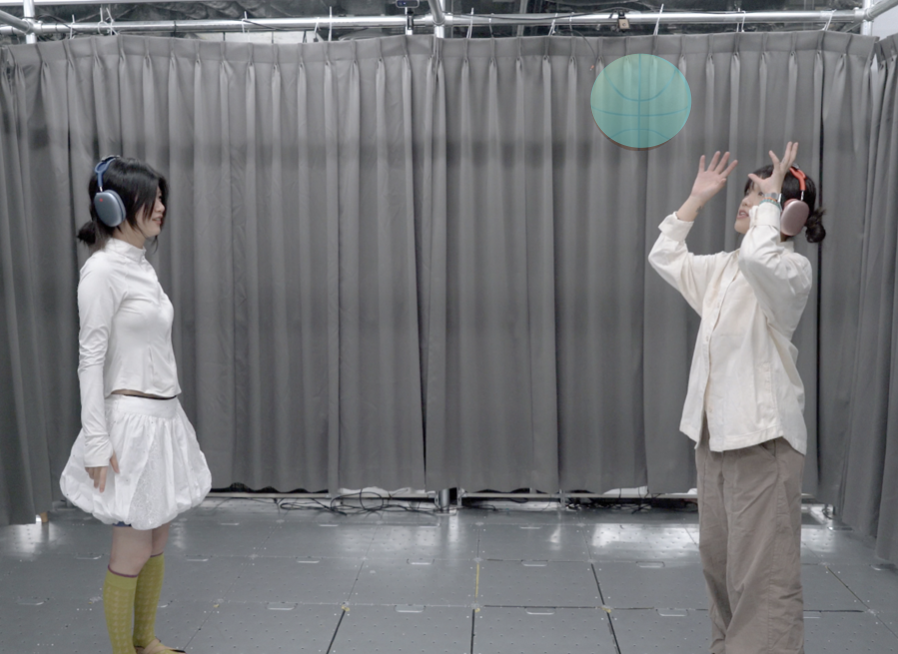
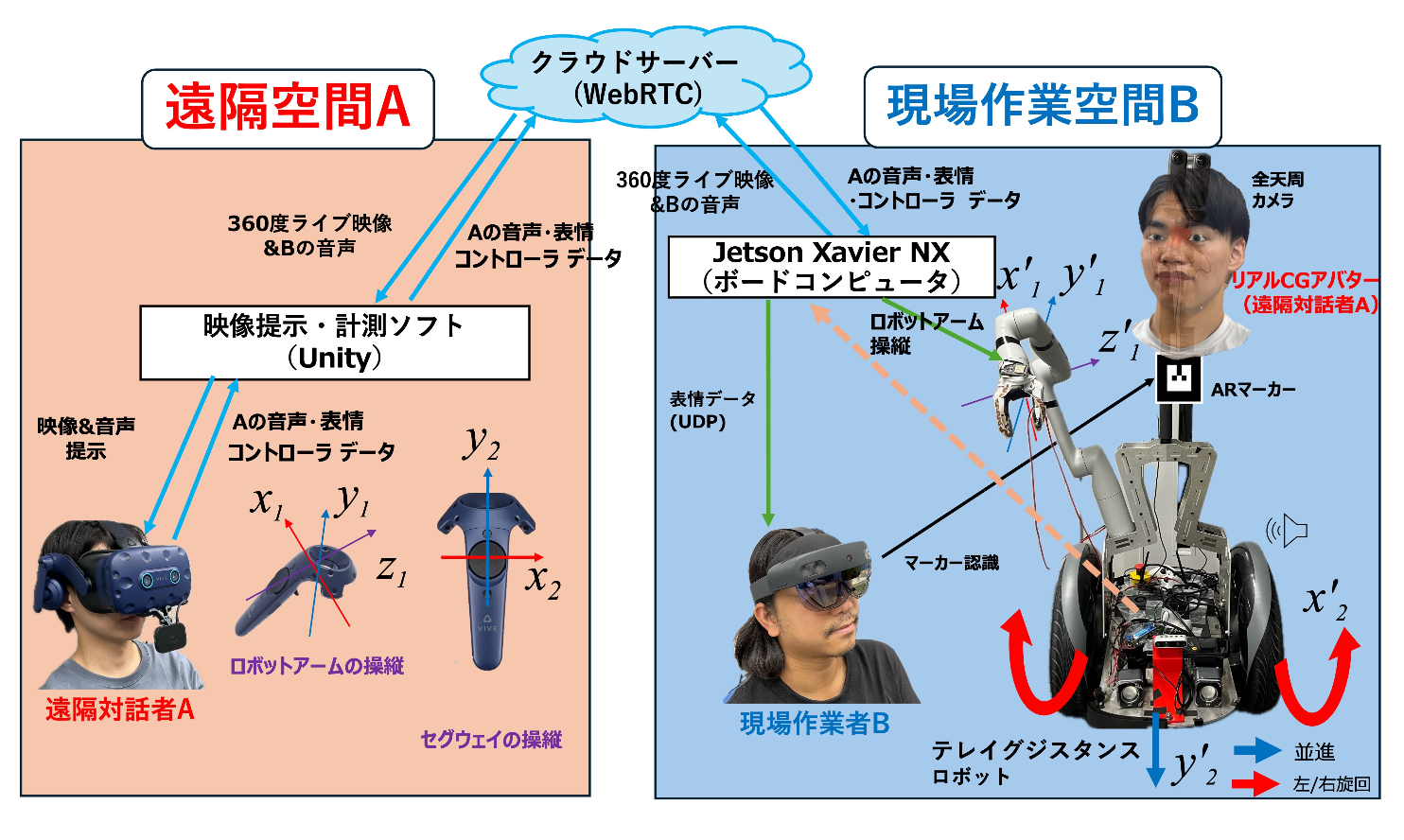
テレイグジスタンスアバターロボットによるXR遠隔作業・対話システムに関する研究
〇米田 悠人(元 東京都立大学大学院)、小島 優希也(東京都立大学大学院)、福地 庸介(東京都立大学大学院)、YEM VIBOL(筑波大学大学院)、池井 寧(東京大学大学院)、西内 信之(東京都立大学大学院) - 本研究では,テレイグジスタンスロボットとXR技術を統合し,遠隔対話者の存在感と非言語コミュニケーションを強化するXR遠隔作業・対話システムを構築した.遠隔対話者の表情を3D表示のリアルCGアバターで再現し,自然な対話環境を実現した.評価実験では,2D表示と比較して3D表示は対話者の存在感や非言語情報の伝達を有意に向上させ,ロボットアームによるタスク完遂を通じて提案システムの有効性が示された.
- 3B2-12
-
識別子連携分散フォーマットに基づく多感覚の経験共有プラットフォームの基礎検討
〇東 治臣(慶應義塾大学大学院メディアデザイン研究科)、朱 宇凡(慶應義塾大学大学院メディアデザイン研究科)、Brophy Jack(慶應義塾大学大学院メディアデザイン研究科)、Rasa Ismael(慶應義塾大学大学院メディアデザイン研究科)、森田 迅亮(慶應義塾大学大学院メディアデザイン研究科)、堀江 新(慶應義塾大学大学院メディアデザイン研究科)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 視聴触覚など多感覚の記録・保存・再生は重要であるが,スマートフォンによる動画撮影など従来のデジタル機器を用いた経験共有は視聴覚が中心であり,触覚を含む多感覚の記録・保存・再生を一体管理する仕組みの普及には至っていない.本研究では異なる機器が生成する映像・音響・触覚の記録データを識別子で束ねたフォーマットで分散保存し,識別子を用いてデータを参照することで同期再生できるプラットフォームの基礎検討を行った.実装例として小型筐体の経験共有ボックスを試作して,本プラットフォームを用いた多感覚の経験共有の可能性を示す.
