Sept. 18 2025
9月18日
口頭発表 09:10-9:50 視覚
座長:伴 祐樹(東京大学)
- 2C1-01
-
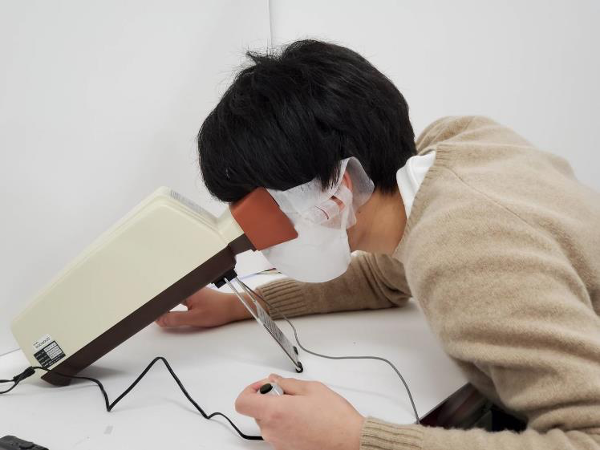
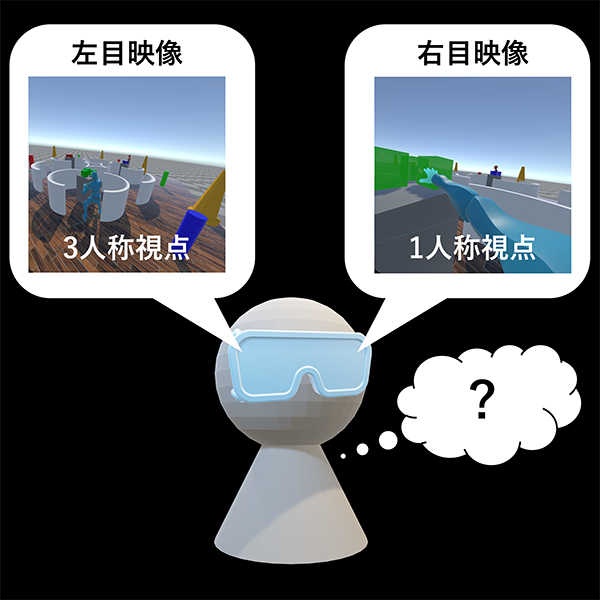
視線情報を利用した両眼視野闘争の特性を用いた1人称視点と3人称視点の融合提示についての検討
〇酒井 宏伸(電気通信大学)、橋本 直己(電気通信大学) - VRアプリケーションにおける,1人称視点の高い身体感覚と3人称視点の高い空間把握力を両立させる映像提示手法を検討している.我々は両眼視野闘争を利用してユーザが知覚する映像を意識によって切り替えられる点に注目した.本稿では視野映像の提示手法を変えることで,アバタへの身体感覚や空間把握力がどう変化するかを評価する手法を検討し,その実装結果,評価実験の設計,及び予備検討について述べる.
- 2C1-02
-
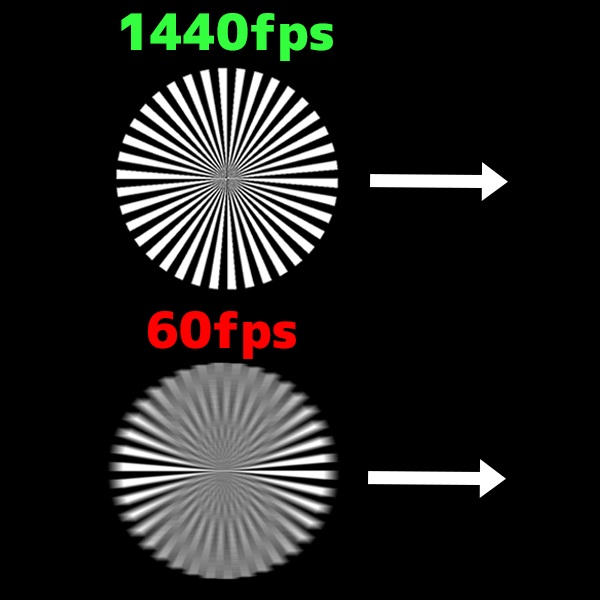
運動視における高フレームレート映像の鮮明化現象測定法
〇中田 健斗(大阪大学)、古川 正紘(大阪大学, 脳情報通信融合研究センター)、原 彰良(大阪大学, 脳情報通信融合研究センター)、前田 太郎(大阪大学, 脳情報通信融合研究センター) - 1,440fpsを達成する視覚刺激は,等価的無遅延な視覚提示法として有望である.観察者と相対運動する映像を提示すると,60fpsと比較し1,440fps下で鮮明化現象が得られる.一方で,本現象を定量評価可能な指標は知られておらず,定量的に未測定であった.そこで本稿では,鮮明化現象が,空間輝度勾配・量子化・局所コントラストの3指標の線形結合と仮定した,知覚的等価ブラー指標を設計し定量的に測定した.
- 2C1-03
-
VR空間における動的物体の強制遠近手法の提案とその応用
〇加藤 義春(東海大学)、外山 昂久(東海大学)、正木 智也(東海大学)、水谷 賢史(東海大学) - 本研究ではVR空間内における動的物体のための新たな強制遠近法の手法とその応用可能性を示す。通常、眼球が動的物体の像を捉える際、視野角が変化することで自身と物体との距離感覚を取得する。今回、私たちが提案する手法は、その視野角が変化しない調整を動的物体に施すことにより、物体のサイズ変化による距離感覚を消失させる錯視手法である。この手法は視覚情報処理における予測メカニズムの解明に寄与する。
- 2C1-04
-
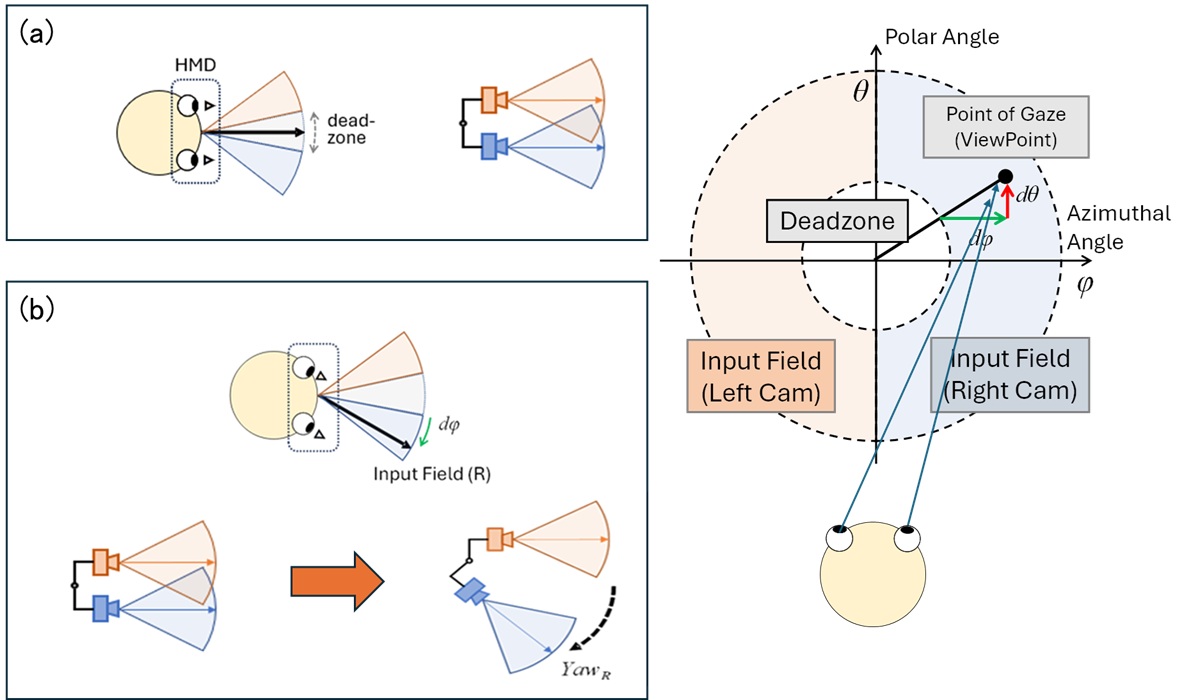
アイトラッキングを用いたカメレオン型VR視野制御手法の提案と評価
〇中湊 大斗(富山県立大学)、井上 康之(富山県立大学) - 本研究は視線入力で左右視野を独立に制御することで異なる視線方向を視野闘争下で体験するカメレオン視覚システムを開発し、VR空間内での複数目標探索タスクで評価を行った。その結果、ジョイスティックを用いた従来手法に比べて視線入力を用いた本手法は眼球方向の推定精度や応答性の問題から探索タスクにおける課題成績は低下したがシミュレータ酔いスコア(SSQ)には有意差はなく本手法の妥当性が示された。
- 2C1-05
-
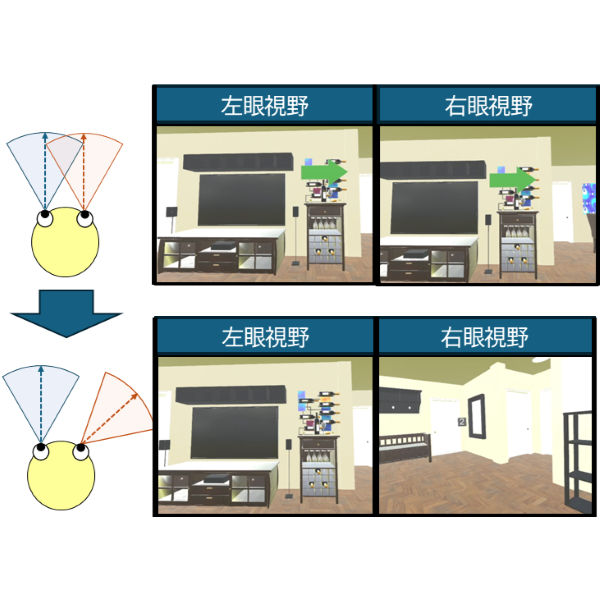
左右眼独立視野の半自動制御による全周視野インタフェースの開発
〇井上 知樹(沼津工業高等専門学校)、井上 康之(富山県立大学)、萩原 隆義(長野工業高等専門学校)、鳥海 智志(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学)、勝俣 安伸(沼津工業高等専門学校) - 発表者らが提案する左右眼の向きを独立に制御する視野拡張インタフェースにおいて、周囲に出現するターゲットの位置に応じて視野方向を自動で操作する手法を導入した。視覚探索課題を用いて、コントローラによる手動操作と比較し、課題成績、ユーザビリティ、VR酔いの観点から評価を行った。あわせて、視野の自動的な移動による違和感や酔いを低減する手法として、移動方向を示す手がかりの提示による効果についても検討した。
- 2C1-06
-
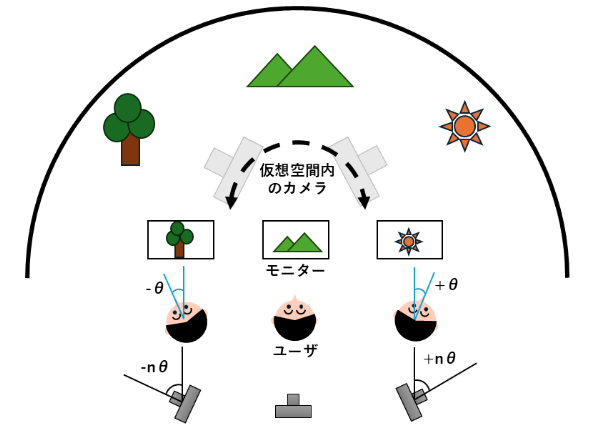
Fitts' Lawに基づく頭部姿勢による固定画面視野制御時の制御性能評価
〇加藤 巧己(岐阜大学)、小木曽 直輝(コナミ)、木島 竜吾(岐阜大学) - 本研究は,頭部の動きで視野を操作するシステムにおいて,フィッツの法則が成立することを示し,最適なC-D比を検討することを目的とする.ユーザの顔の動きをWebカメラでトラッキングし,仮想空間内のカメラが回転し,ターゲットを中央に合わせることでポインティングを行う.実験の結果,視野操作型のポインティングにもフィッツの法則が適用できることが示唆され,C-D比が3倍では操作性が大幅に低下することが明らかとなった.
- 2C1-07
-
VRによる動物的外見と振る舞いの変化が物体を撫でる際の快感情誘発に与える影響の検証
〇野口 翔平(奈良先端科学技術大学院大学)、澤邊 太志(奈良先端科学技術大学院大学)、Butaslac Isidro(奈良先端科学技術大学院大学)、神原 誠之(奈良先端科学技術大学院大学、甲南大学)、加藤 博一(奈良先端科学技術大学院大学) - 人や動物を撫でることでストレスを軽減させることが可能であり、撫でることを目的とした動物ロボットやVRペットが開発されている。しかし、動物ロボットは大きさや複雑さといった物理的制限から相互作用を多様化しづらく、VRペットでは実際に撫でた触覚を伴うことが難しい。そこで本研究では、VR技術を用いて実際に手で撫でる物体の外見や動きを変化させることでこれらの課題を解決しながら、撫でた際に快感情を誘発し、ストレスを軽減させることを目指す。本稿ではその第一段階として、実際に撫でる物体の外見や振る舞いの変化が撫でる際の快感情誘発に与える影響を検証する。

- 2C1-08
-
ドライビングシミュレータにおけるHMDのフレームレート低下が注意喚起に及ぼす影響
〇前原 宙(大阪工業大学)、橋本 渉(大阪工業大学)、西口 敏司(大阪工業大学)、水谷 泰治(大阪工業大学) - 本研究では,ドライビングシミュレータを用いて,歩行者や対向車などの,注意を向けたい対象に視線が向いた際に画面全体のフレームレートを意図的に変化させることで,視覚的違和感を通じた自然な注意喚起を誘発する.この手法がドライバーのブレーキ操作における反応時間に与える影響を詳細に検証し,運転支援への応用を検証する.

- 2C1-09
- 取り下げ
- 2C1-10
-
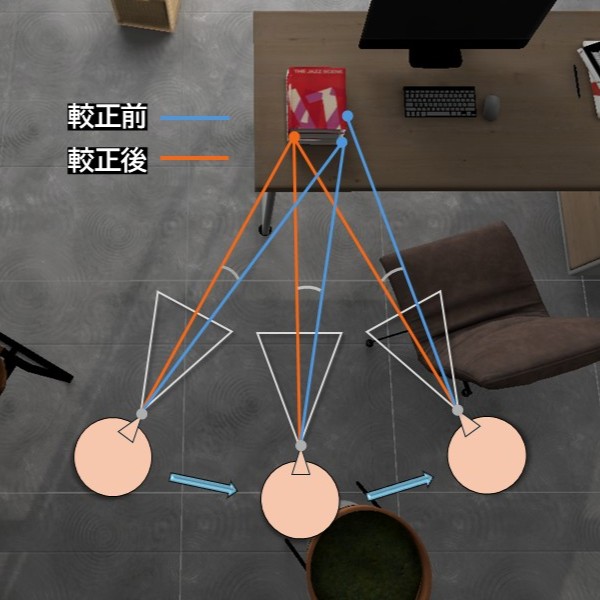
固視検出に基づく視線自動較正法における並進速度の影響
〇井上 想子(龍谷大学)、浦宗 龍生(LINEヤフー株式会社)、池田 聖(龍谷大学) - 任意のVR環境において,固視検出に基づき視線計測器を自動較正する手法が提案されている.本研究では,頭部の移動速度と較正精度との間に関係性があると仮定し,オフィスを模したVR 環境における頭部の並進速度が較正精度に与える影響について調査した.本発表では,並進速度が固視検出に与える影響について分析し,較正精度を高めるために適した速度の範囲について議論する.
- 2C1-11
-
両眼に独立した視野を提示するシステムがユーザに与える負荷に関する基礎検討
〇水野 文雄(東北工業大学)、笹嶋 悠人(東北工業大学)、後藤 優樹(東北工業大学) - 我々は,カメレオンのように両眼を独立して動かした状態の視野をユーザに与える装置「バーチャルカメレオン」の開発を行ってきた.多くのユーザがバーチャルカメレオン使用後に疲労感を報告したため,我々はフリッカー値を評価指標とした基礎実験を行った.その結果,全く異なる視野を与えた方が,疲労度が小さくなる可能性が示唆された,本研究においても,フリッカー値を評価指標とした実験による検討を進めたため報告する.