Sept. 17 2025
9月17日
口頭発表 10:10-10:50 医療
座長:井村 誠孝(関西学院大学)
- 1C2-01
-
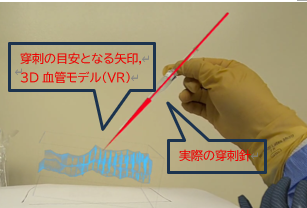
プレスキャンエコー画像を用いた複合現実ガイド下深部静脈穿刺の概念実証
〇宮部 亮(愛媛大学大学院)、檜垣 彰典(愛媛大学大学院) - 深部静脈穿刺の合併症を回避する方法として一般的にリアルタイムエコーガイド下穿<#%BR%#>刺が推奨されているが, 非直観的であり必ずしも安全な手法ではない. 我々は事前に穿<#%BR%#>刺部位をスキャンした超音波画像から3D血管モデルを構築し, ヘッドマウントディス<#%BR%#>プレイにより患者の体表面に重畳表示する複合現実ガイド下深部静脈穿刺法を開発し<#%BR%#>た. 本手法の実現可能性について循環器内科医師を対象としたカダバートレーニングを<#%BR%#>通じて検証した.
- 1C2-02
-
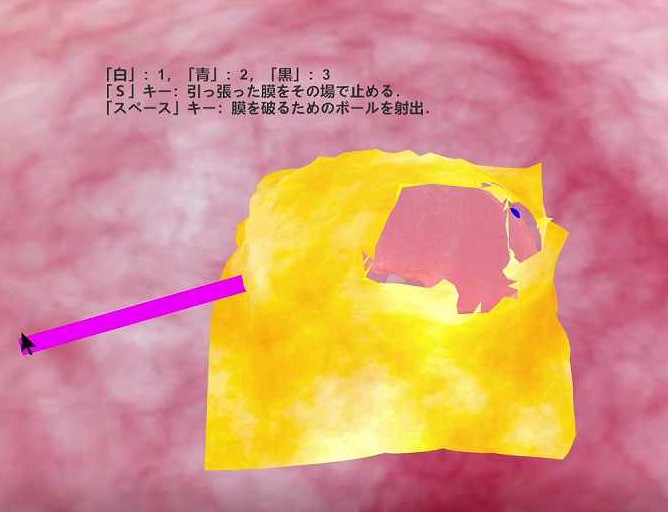
臓器の柔軟性と膜の剥離・切開を再現する内視鏡手術シミュレータの開発
〇阿部 陽斗(岡山県立大学)、小枝 正直(岡山県立大学)、曲渕 敏博(京都大学)、澤田 篤郎(宮崎大学)、大西 克彦(大阪電気通信大学)、登尾 哲史(大阪電気通信大学) - 腎臓手術における膜の剥離から腫瘍の発見までを再現する内視鏡手術シミュレータをUnityと動力学エンジンObiで開発した.膜の物理挙動を再現し,マウス操作とキーボード操作によって膜の剥離・切開動作を実装した.非医療系学生9名による評価では,膜の摩擦の有無や剥離方法により操作時間や引張力に差がみられた.一方で,3次元空間での操作性や膜の被覆枚数,切開動作のリアリティについては課題が残された.
- 1C2-03
-
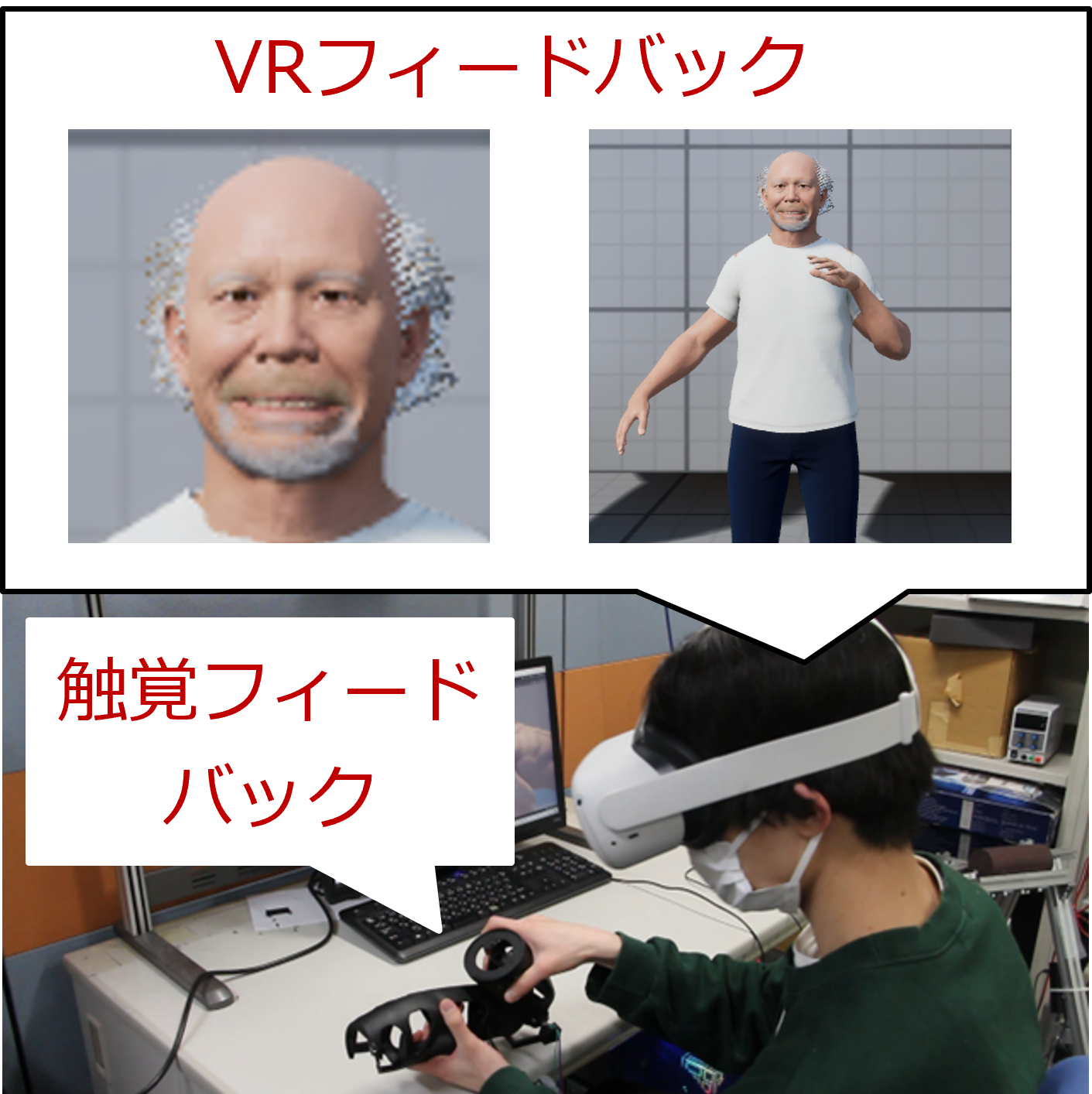
介護訓練ロボットにおけるVR空間を用いたフィードバックシステムの提案
〇遠藤 優貴(立命館大学大学院 情報理工学研究科)、Nguyen TriTungNguyen(立命館大学大学院 情報理工学研究科)、細田 侑也(立命館大学 情報理工学部)、李 周浩(立命館大学 情報理工学部) - 高齢者の拘縮を再現したロボットであるCaTARoを動作しながら,仮想空間上でモデルの表情や動きを見ることで人間に介助している感覚を獲得することを目的とした,V-CaTARoの開発を行っている。実験にて,介護者がより認識しやすい被介護者の状態であるフィードバックが必要とされた。本論文では,モデルの表情の改善や音声やエフェクトなどのフィードバックを追加することで,人間に介助している感覚の増幅を目指す。
- 1C2-04
-
バーチャルリアリティを用いた脳卒中患者体験による患者への理解の変化
〇金 民教(東京大学)、金谷 崇文(東京大学)、矢崎 友基(東京大学)、畑田 裕二(東京大学)、葛岡 英明(東京大学)、鳴海 拓志(東京大学) - 脳卒中の病態は多様であり,物理的な器具による障害者体験は教育に有用だが,表現できる病態に限界がある.本研究では,体験者の脳卒中患者への理解を推進することを目的として,身体の片側の随意的な運動ができなくなる片麻痺,及び左右片側の視空間の認知が障害される半側空間無視を体験できるVRシステムを開発した.体験後の主観評価や非構造化インタビューを通して体験システムの有効性を検証した.

- 1C2-05
-
上肢片麻痺患者を対象としたXRリハビリテーション評価の基礎的検討
〇平塚 心太朗(北見工業大学)、河内 義直(北見工業大学)、酒井 大輔(北見工業大学) - 我々は、脳卒中後の慢性期上肢片麻痺患者が、つまみ動作のリハビリを楽しく継続できるXRソフトウェアを開発した。本研究では、開発したXRリハビリについて、ユーザーの「楽しさ」「継続意欲」「集中度合い」の評価について検討した。本発表では、健常者を対象としたアンケート及び、頭皮脳波(EEG)を用いた基礎的な評価について報告する。

- 1C2-06
-
四肢切断処置XR学習システムの開発
〇青木 大地(北海道大学)、王 旭(北海道大学)、下江 隆司(和歌山県立医科大学)、村上 壮一(北海道大学)、妹尾 拓(北海道大学)、七戸 俊明(北海道大学)、安部 崇重(北海道大学)、伊達 宏昭(北海道大学)、金井 理(北海道大学)、近野 敦(北海道大学) - 本研究では外傷外科教育における利用可能性の高い教育方法として,市販のHMDを用いたトレーニングシステムを提案する.本システムは講習モードと実践モードに分かれており,講習モードではモーションキャプチャにて撮影した外傷処置専門医による処置を確認することが可能である.実践モードでは実際にコントローラを用いて処置を行う.その際に振動を用いた触覚提示により,VR特有の課題である奥行き感喪失の克服を目指す.
- 1C2-07
-
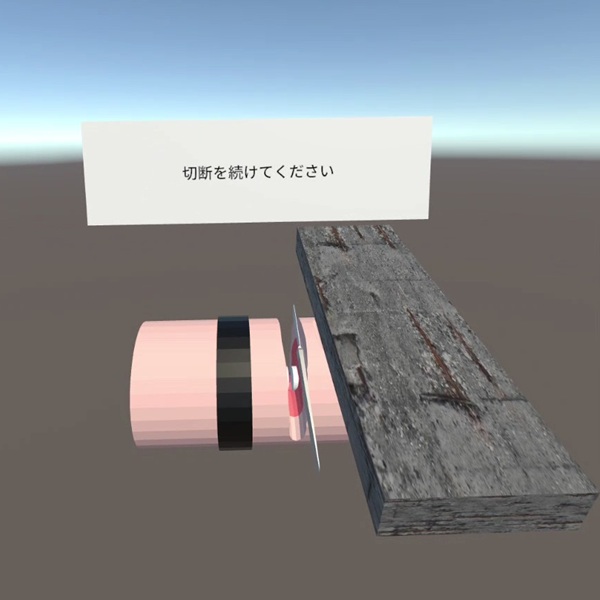
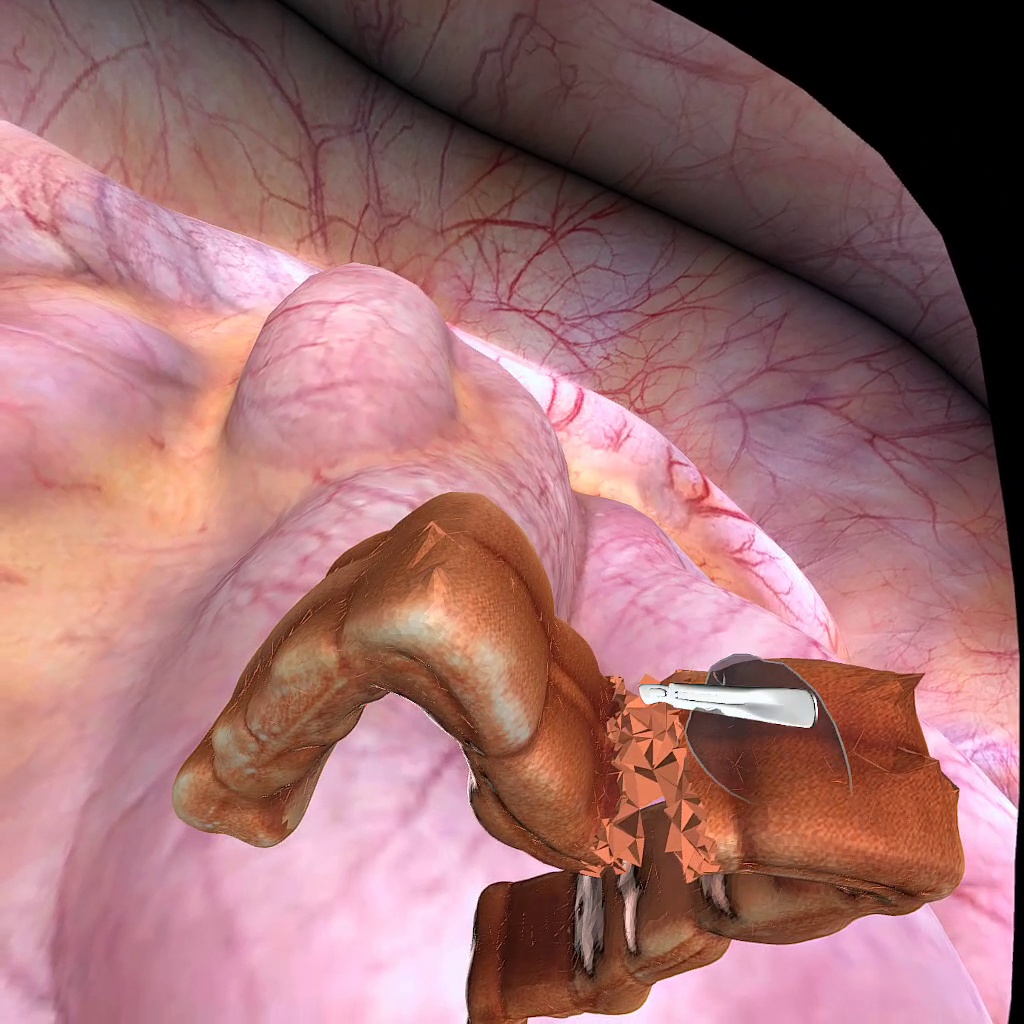
ネオ・フッキアン制約によるリアルタイム弾性体切断シミュレータの開発
〇王 旭(北海道大学)、青木 大地(北海道大学)、村上 壮一(北海道大学)、下江 隆司(和歌山県立医科大学)、妹尾 拓(北海道大学)、伊達 宏昭(北海道大学)、七戸 俊明(北海道大学)、安部 崇重(北海道大学)、金井 理(北海道大学)、近野 敦(北海道大学) - 本研究では,ネオ・フッキアン制約に基づく位置ベース法を採用し,変形体に対するリアルタイム切断シミュレーションフレームワークを提案する.ネオ・フッキアン制約の導入により,応力テンソルの計算を可能とし,エッジ間制約を考慮せずにGPU並列処理を簡素化した.また,切断後の断面を視覚化するため,四面体メッシュと表皮メッシュを同時にレンダリングする手法を開発した.さらに,提案した切断シミュレータをMeta Quest3と統合し,腸の簡易切断シミュレーションを試作し,良好な結果を得た.本フレームワークは,GPU並列化による高速な切断シミュレーション計算手法を開発し,複合現実システムと統合しても40fpsの応答を可能とするものであ
- 1C2-08
-
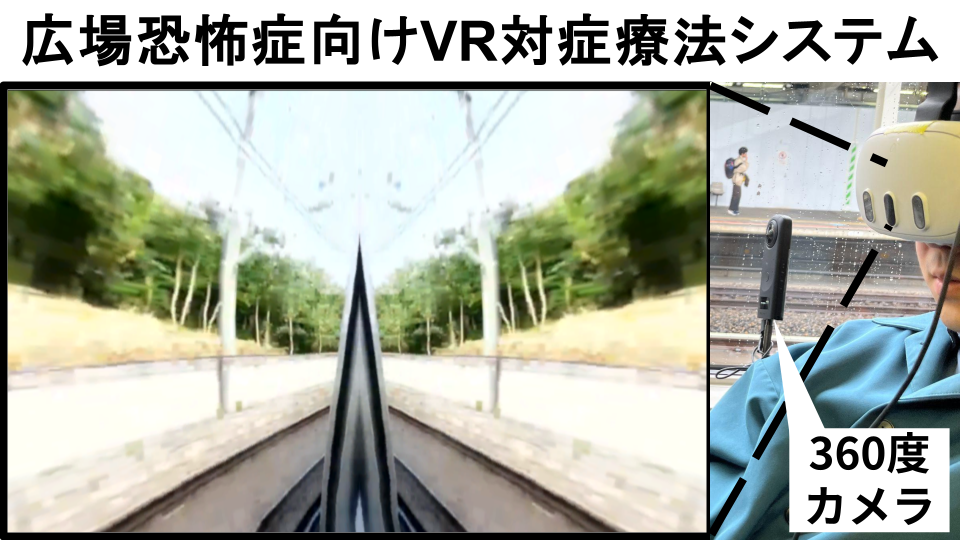
広場恐怖症向けVR対症療法システムの基礎的検討
〇有住 拓杜(東京大学)、大伏 仙泰(東京大学)、宮崎 敦子(東京大学)、檜山 敦(一橋大学)、稲見 昌彦(東京大学) - 広場恐怖症は逃げ出すことや助けを得ることが困難な状況で恐怖や不安を感じる精神疾患である.恐怖を感じる場面での対症療法として薬物療法が存在するが,依存や記憶障害などの副作用が課題である.本研究では身体的負担の少ない対症療法の確立に向け,広場恐怖症様の症状を持つ当事者の症状分析に基づき設計したVR対症療法システムを提案する.また,パイロットスタディにより明らかになったシステムや実験系の課題を報告する.
- 1C2-09
-
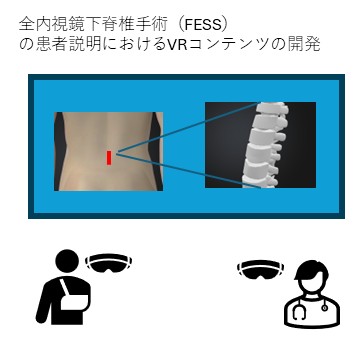
全内視鏡下脊椎手術の患者説明におけるVRコンテンツの開発
〇島尾 青空(静岡大学、静岡大学 創造科学技術大学院 自然科学系教育部)、加瀬 裕貴(静岡大学)、竹林 研人(岩井整形外科病院)、古閑 比佐志(岩井整形外科病院)、青木 徹(静岡大学)、竹林 洋一(創造する心株式会社)、水野 拓宏(株式会社アルファコード)、関 正宏(株式会社アルファコード)、石川 翔吾(静岡大学) - 全内視鏡下脊椎手術の現場では,患者に病状・手術内容を説明する場合に CT 等各種スキャンによる 2 次元画像を用いており,患者にとって理解が難しいことが課題となっている.本研究では岩井整形外科病院と連携し,VR による患者説明を通して患者の不安低減や理解度の向上を目指す.
- 1C2-10
-
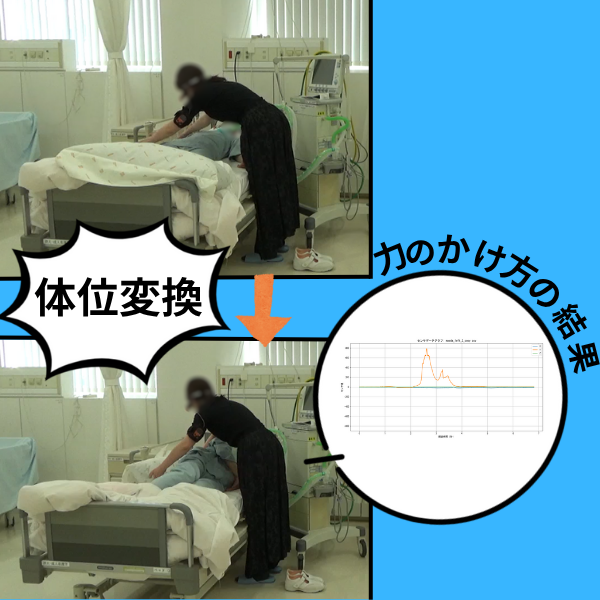
MEMS触覚センサを用いた体位変換時における看護学生とベテラン看護師の力のかけ方の比較
〇小林 大将(大阪工業大学)、大井 翔(大阪工業大学)、野間 春生(立命館大学)、森谷 利香(摂南大学)、山本 裕子(畿央大学) - 本研究は,MEMS触覚センサを用いて,ALS患者に対する体位変換動作における看護学生とベテラン看護師の「力のかけ方」の違いを定量的に分析することを目的とする.<#%BR%#>本研究では,体位変換時の手掌部にかかる圧力をMEMS触覚センサにより取得し,各動作フェーズにおける加圧のタイミングや大きさ,変化の特徴を分析する.これにより,経験者と初学者の動作特性の違いを明らかにする.
- 1C2-11
-
掃除動作に基づくMR認知リハビリテーションシステムの設計に関する検討
〇西村 亮汰(大阪工業大学)、大井 翔(大阪工業大学) - 高次脳機能障害は、脳の損傷により思考、記憶、行動、言語、注意などの認知機能に障害が生じた状態である。特に、日常生活において掃除は計画性を要するタスクで苦手な人も多い。本研究では、Mixed Reality技術を用いて掃除を題材としたMR認知リハビリテーションシステムを提案し、その要件について検討した。
