Sept. 13 2024
9月13日
このプログラム速報版は8月26日暫定版です.座長は掲載していません.
投稿原稿PDFは9/10(火)16:00公開予定のWeb予稿集に掲載されます.
(原稿投稿時にプログラム速報版へのサムネと発表要旨の公開不可を選択された方はWeb予稿集にのみ掲載されます)
(Web予稿集公開時に, プログラム速報版をWeb予稿集に差し替えます)
口頭発表09:30-10:10 、ポスター発表10:55-11:40
教育・訓練1
- 3A1-01
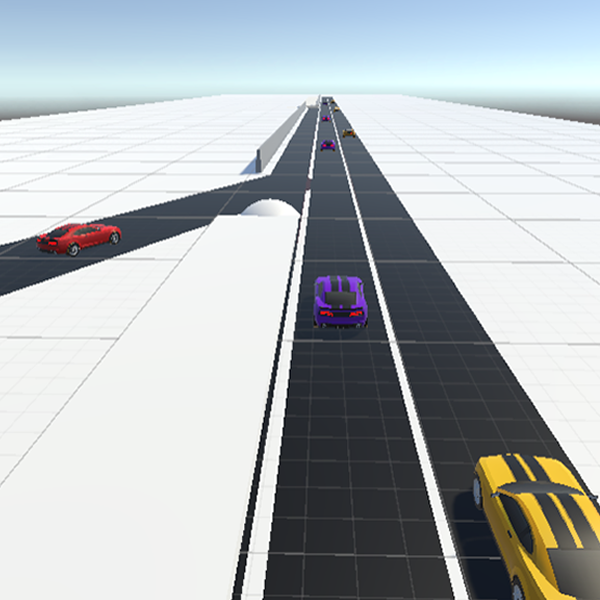
- Unity ML-Agentsを用いた自動運転強化学習における事故回避シミュレーションの提案
〇増田 琉利(東海大学)、加藤 央祐(東海大学)、水谷 賢史(東海大学) - 自動運転技術は急速に進展しており、国内でも実証実験が行われている。本研究では、まずレースサーキット環境で障害物有りと無しの環境で学習させ、その性能を評価する。次に、サーキット環境で学習させたものと事前学習なしのエージェントを高速道路合流部環境において、他車との衝突回避を学習させ、平均累積エピソード報酬を評価し事前学習の効果を検証した。
- 3A1-02
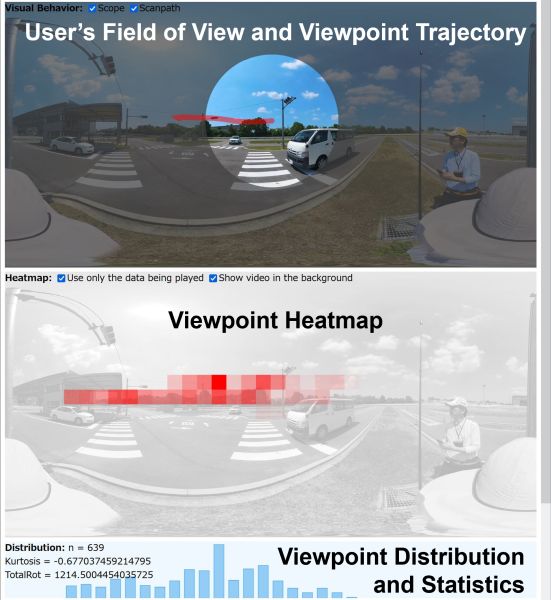
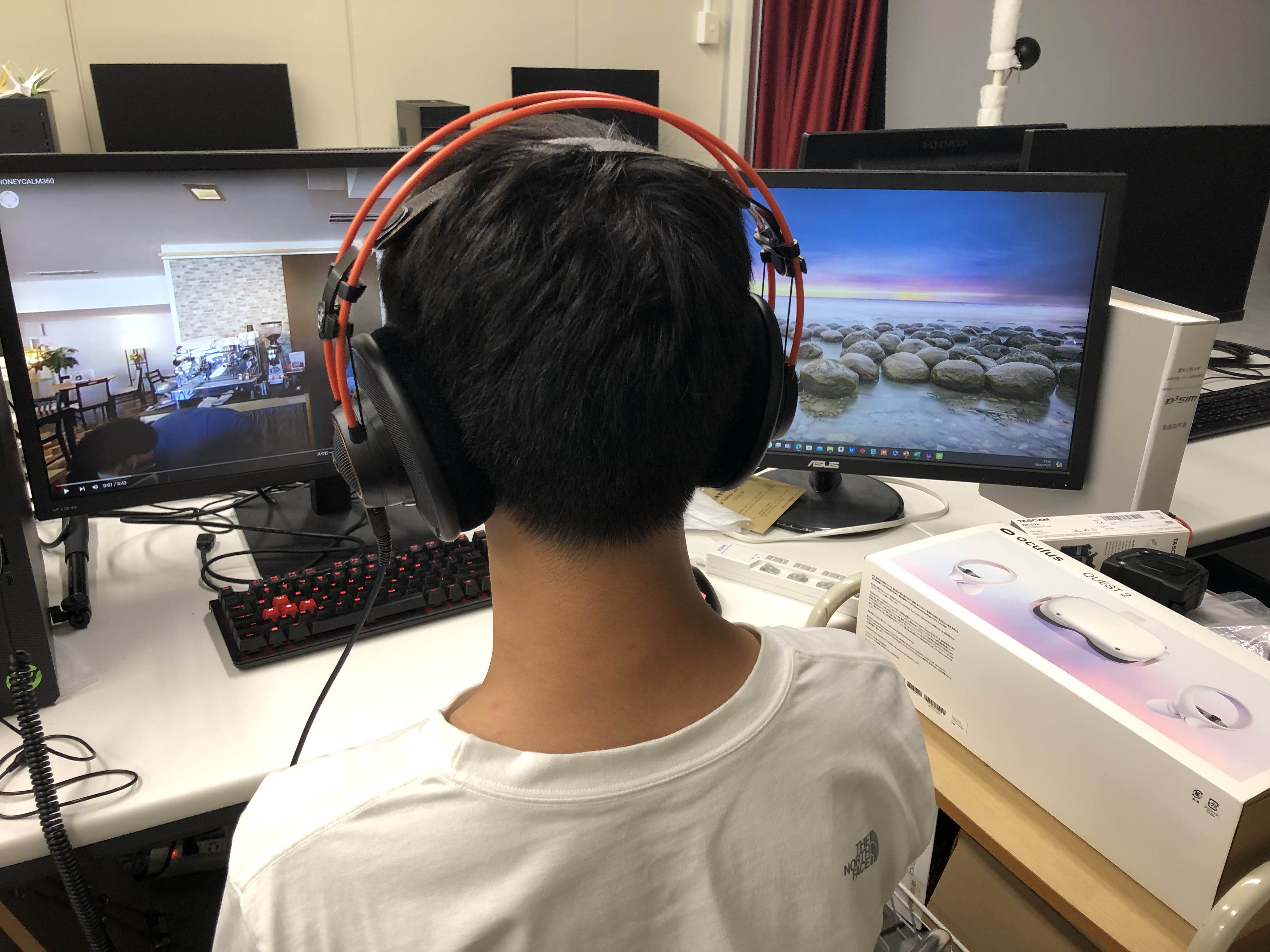
- 全天球動画を用いた危険予知トレーニング向け視行動分析システムの試作
〇國分 三輝(愛知淑徳大学) - 全天球動画を用いた危険予知トレーニングは広範囲の危険を探索する視行動を促進する効果が期待されるが,トレーニングが視行動に及ぼす効果の検証が十分ではない.本研究では交通危険予知を例に,トレーニング実施中の視行動の簡便な指標としてユーザ視野カメラの回転角を記録・可視化・分析するシステムを試作した.試行の結果,交通安全意識の向上とともに,水平方向の視点分布の広範化及び視野回転角の拡大傾向が認められた.
- 3A1-03
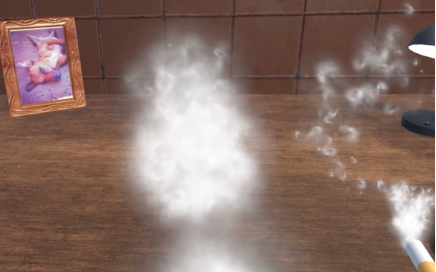
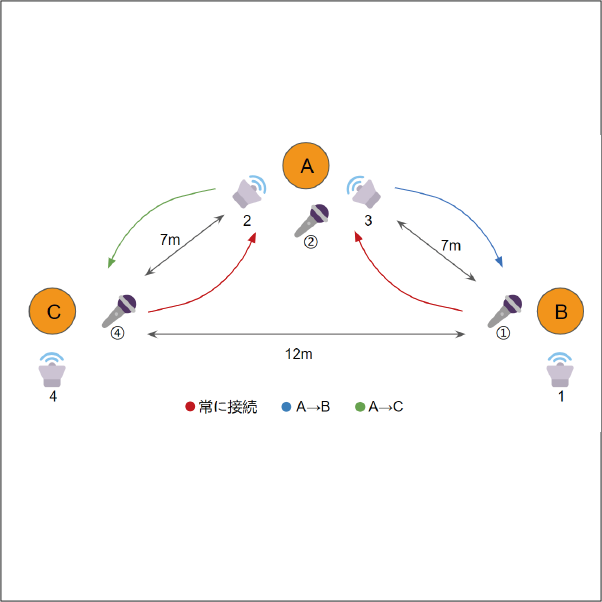
- より効果的なキュー曝露療法のためのインタラクティブVRシステムの開発
泉 秀哉(福井工業高等専門学校)、〇小松 貴大(福井工業高等専門学校) - VR機器を用いたタバコ依存症治療のためのキュー曝露療法(CET)において、外部センサによるキューとしての効果の変化を調査した。<#%BR%#>VR-CETシステムを開発し、マイク情報により、より効果的なキューを提示することを目指した。<#%BR%#>喫煙者7名に対して3回のVRセッションを実施しその前後での喫煙衝動を主観調査で調査した。<#%BR%#>プラセボセッションに比べて外部センサ有りの喫煙セッションは喫煙衝動を有意に上昇させた。
- 3A1-04
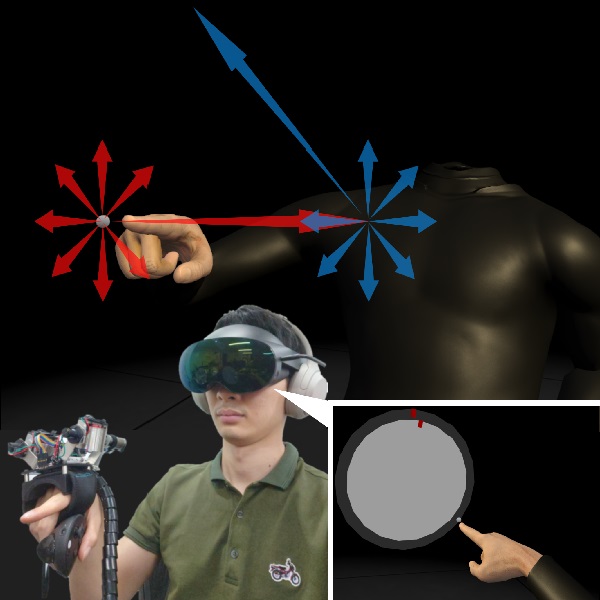
- 力覚的融合身体の実現に向けた基礎的検討
〇鈴木 嵩茂(東京大学)、橋本 健(東京大学)、中村 拓人(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学) - 熟練者と学習者が同一のアバタを使用する融合身体を利用した運動学習は学習効率や技能定着を向上させることが示されている.他方,融合身体が効果を生むにはアバタが利用者の視野内に収まる必要があり,適用可能なタスクに強い制約がある.本研究では,力覚提示を利用した融合身体を提案し,視野外の運動への適用を図る.本報告では,身体装着型力提示装置SomatoShiftを用いた融合アバタの視覚提示と力覚提示が利用者に与える影響についての調査結果を述べる.
- 3A1-05
- 二眼カメラ立体映像をリアルタイムに大型裸眼立体視ディスプレイに表示できるシステムの開発
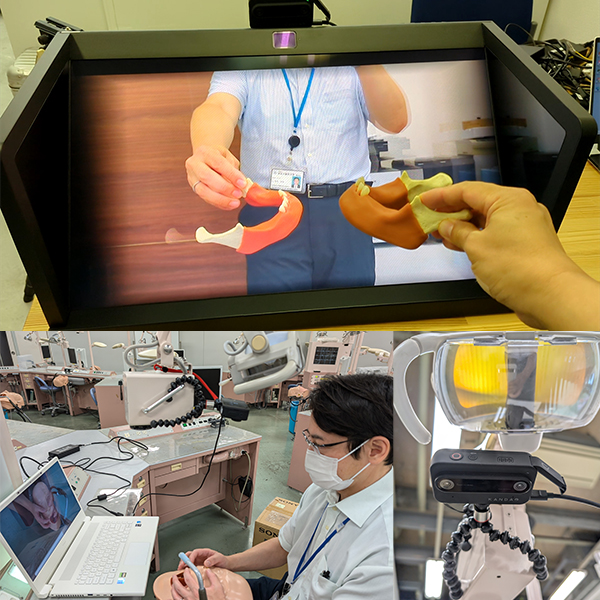
〇板宮 朋基(神奈川歯科大学歯学部総合歯学教育学講座教育学分野)、中野 亜希人(神奈川歯科大学歯学部総合歯学教育学講座教育学分野)、高才 東(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野)、清水 玲那(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野)、石田 孝文(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野)、小松 紀子(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野)、沢井 奈津子(神奈川歯科大学歯学部教育企画部)、安部 貴大(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野) - 本研究では,二眼カメラで撮影した立体映像をリアルタイムに27インチの大型裸眼立体視ディスプレイで立体視できるシステムを開発した.二眼カメラKandao Qoocam EGOで撮影している立体映像を,ソニー空間再現ディスプレイELF-SR2等においてリアルタイムに裸眼立体視できる.iPhone 15 Proを用いて撮影した空間ビデオも再生できる.歯科手技教育における有用性が示唆された.
- 3A1-06
- 裸眼立体視とハプティクス技術を併用した歯牙切削トレーニングシステムの開発
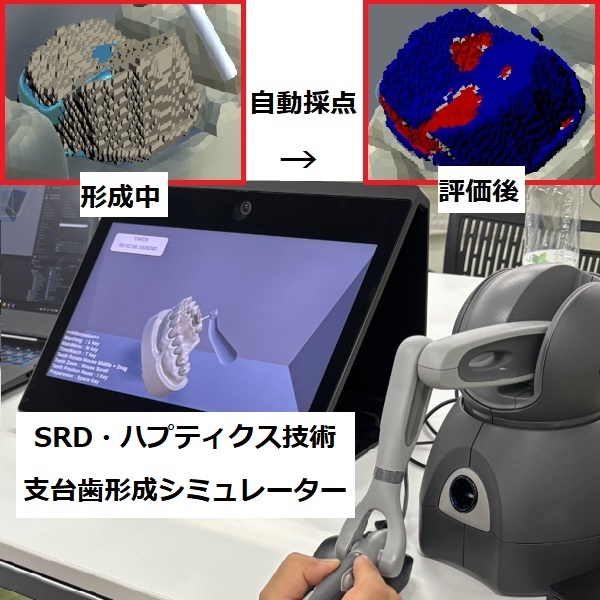
〇富田 凜太郎(神奈川歯科大学)、板宮 朋基(神奈川歯科大学)、中野 亜希人(神奈川歯科大学)、川西 範繁(神奈川歯科大学)、星 憲幸(神奈川歯科大学)、木本 克彦(神奈川歯科大学) - 本研究では裸眼立体視技術とハプティクス技術を併用し,歯科教育において重要な項目の一つである歯牙切削手技の効果的な向上を目的としたトレーニングシステムを開発した.歯列の3D-CGモデルと切削器具の三次元的な位置と角度を裸眼立体視ディスプレイ上に表示し、ペン型ハプティクスデバイスを用いてリアルタイムな歯牙の切削・形成と自動採点が可能である.歯科医師による評価の結果,本システムの有用性が示唆された
- 3A1-07
- 認知症当事者のナラティブに基づくPX体験空間の設計と実装
〇廣部 敬太(静岡大学)、小俣 敦士(静岡大学、浜松医科大学)、水野 拓宏(株式会社アルファコード)、村上 佑順(一般財団法人オレンジクロス)、石川 翔吾(静岡大学) - 医療・介護の人材不足により、パーソンセンタード・ケアスキルの熟達化が求められている。それには認知症当事者の認知的視点を理解するスキルが重要であり、ナラティブの経験的イメージ補完が必要である。本研究では、認知症当事者のナラティブを基に患者体験(PX)をVRで体験することが可能な空間を構築することを目的とした。多様な認知的障害を一人称視点で体験し学習者同士が共有することで、効果的な学習が示唆された。

- 3A1-08
- VRを用いた運動技能上達のための未来のお手本情報提示
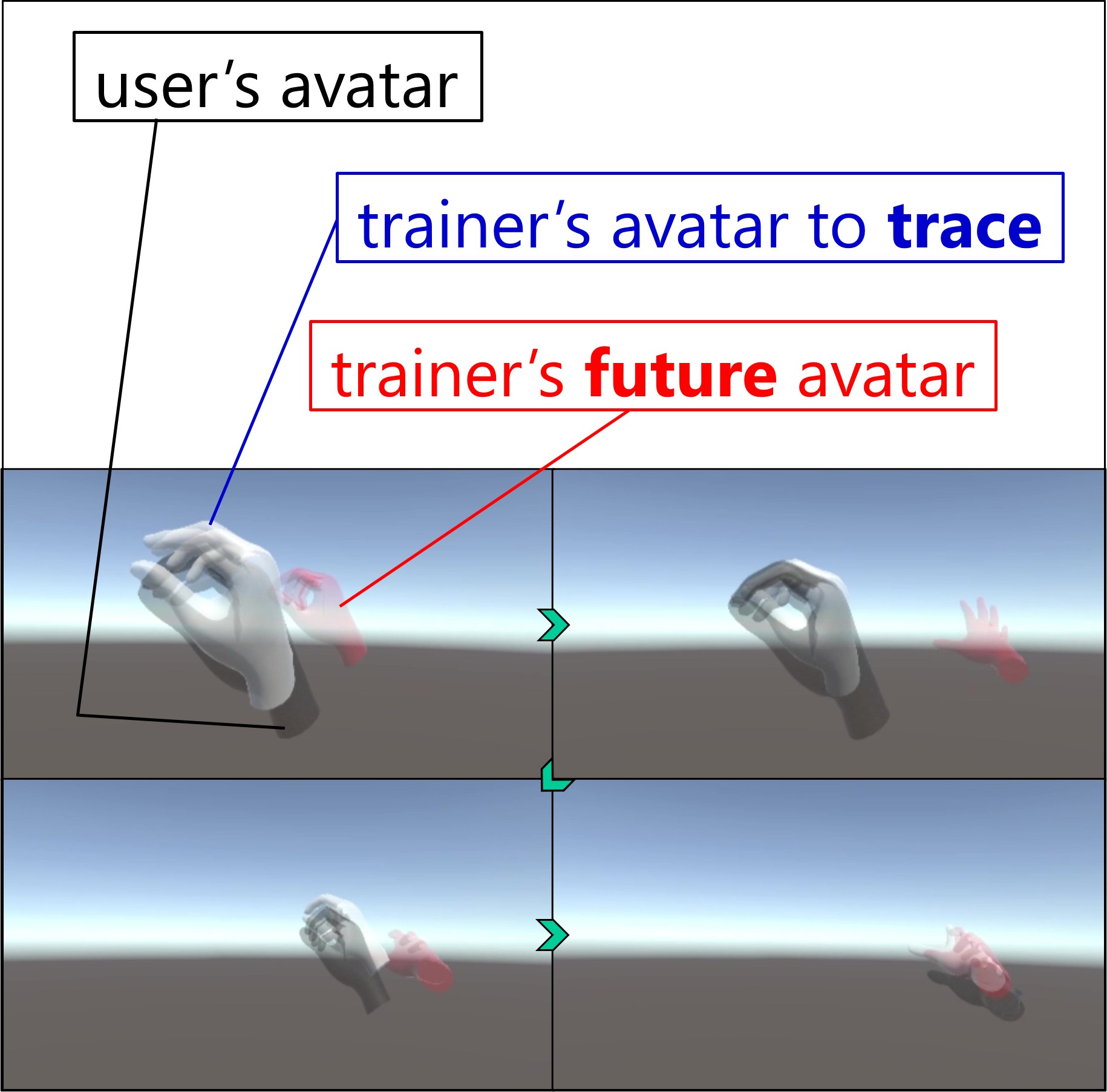
〇佐々木 悠佑(埼玉大学)、入山 太嗣(埼玉大学)、小室 孝(埼玉大学) - 本研究では、VRを用いて技能上達のための新たなお手本の提示方法を提案する。提案手法では、ユーザーが技能トレーニングを行う際、ユーザー自身の動きに対して数秒先の未来の情報を提示することで、上達を支援する。指導者の動きを提示するだけの場合に比べ、未来の情報を得ることによって、速い動きや複雑な動き、タイミングが重要となる技能においても、お手本の動きをより正確に試行できる可能性を検討する。
- 3A1-09
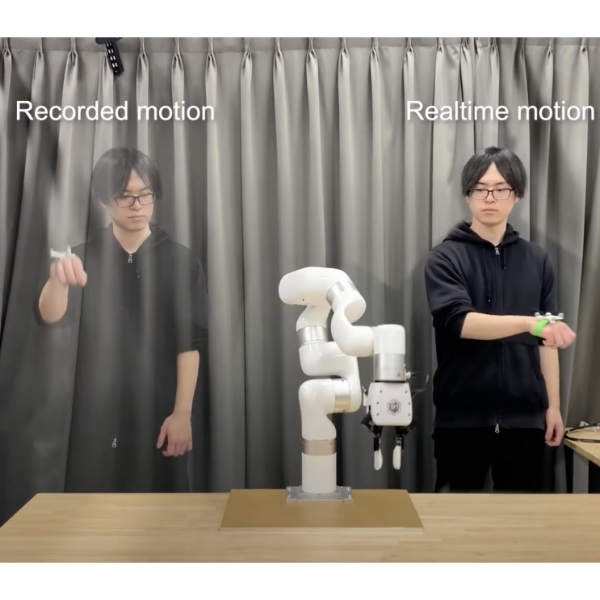
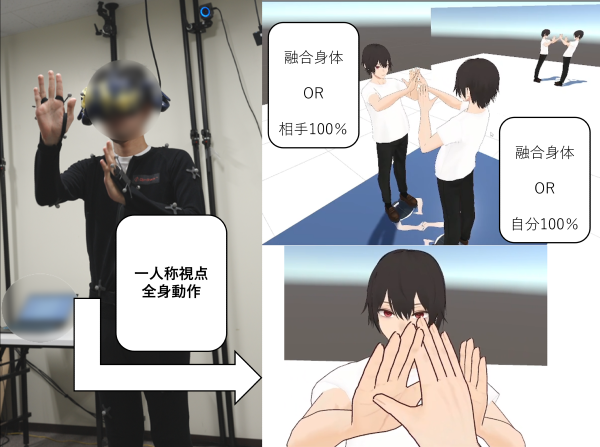
- AIまたは録画データを教師とした融合身体を用いた運動学習効果
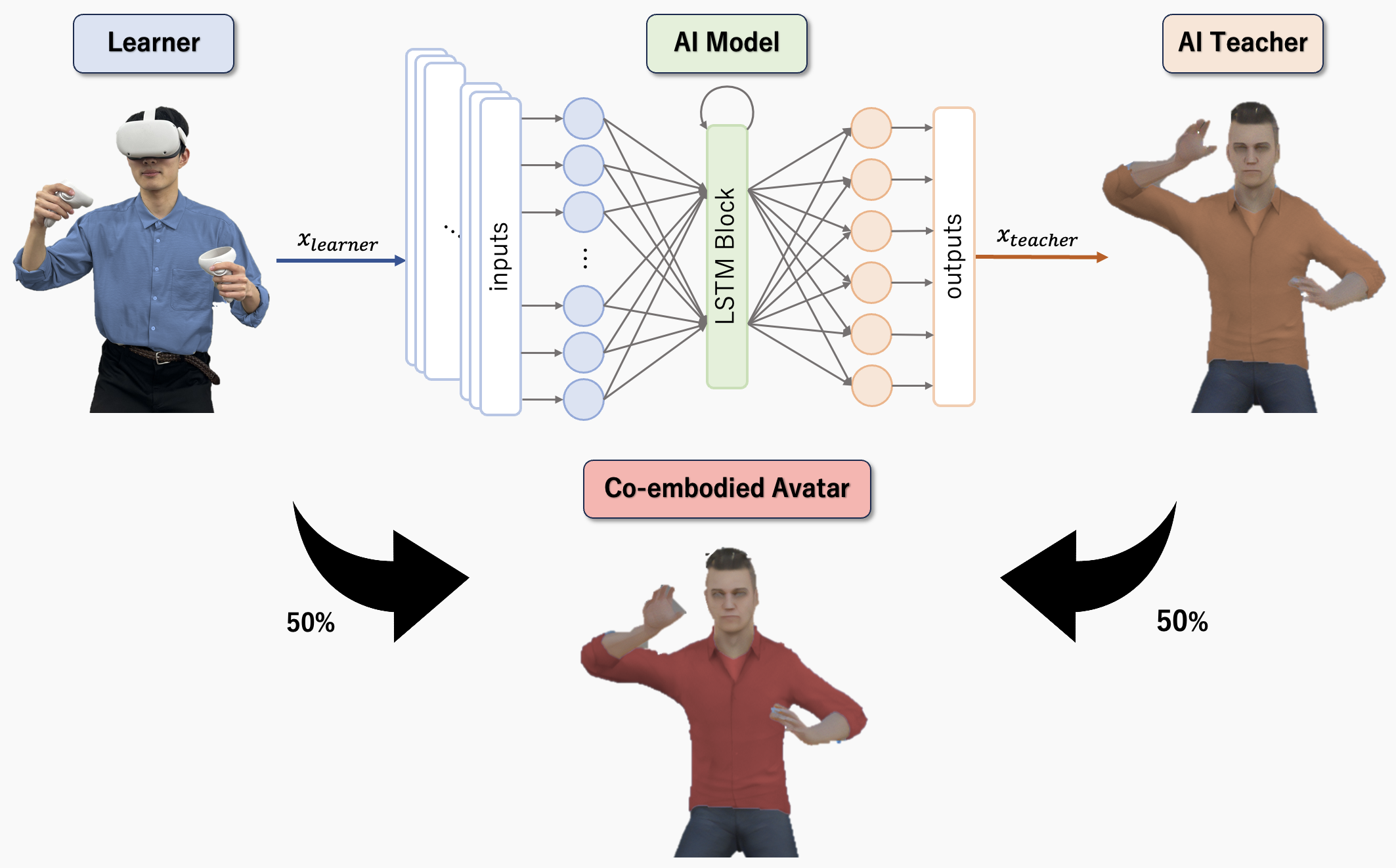
〇田北 陽士(東京大学)、畑田 裕二(東京大学)、鳴海 拓志(東京大学)、谷川 智洋(東京大学) - 加重平均型の融合身体を運動学習に利用する研究が数多く行われている。しかし、教師が融合身体の使用に習熟する必要があり、さらに教師が学習者から悪影響を受ける可能性があるという課題が存在する。本研究では、学習者の動作データと目標位置を入力として、教師の動作を出力するAI教師を教師あり学習を用いて開発した。その上で、教師がAIまたは録画データである場合と、人間が教師である場合の運動学習効果を比較検証した。
- 3A1-10
- 没入型バーチャル環境における他者アバタの外見の変化が対連合学習に与える効果
〇瑞穂 嵩人(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学) - 出来事の記憶には、いつ・どこで・誰とのような周囲の環境的文脈の情報が取り込まれており、記憶の覚える・想い出すという過程に影響する。本研究では、VR体験における他者アバタが環境的文脈として記憶に影響を与えると仮説を立てた。タガログ語と日本語ペア(実験1)や手話のジェスチャと単語のペア(実験2)の対連合学習課題において、他者アバタの外見の変化が記憶成績に与える効果を検証するパイロットテストを実施した。

- 3A1-11
- 緊張感緩和を目的とした自己鏡映像との対話システム
〇小野 秀悟(東京大学)、川越 至桜(東京大学) - 自己対話は,自己の目標の実現に向けて客観的に自己を見つめる手法の一つで あり,教育場面で日常的にセルフケアが行えることで期待される.また,自らの言葉で自分自身に教示を与えることで,自己の行動や情動を変容させる自己教示法(内言)がある.本研究では,自己鏡映像に着目し,脳内にいる自己の存在を視覚・聴覚的に具現化し,自己対話における内言を人工的に模倣するシステムを開発した.

- 3A1-12
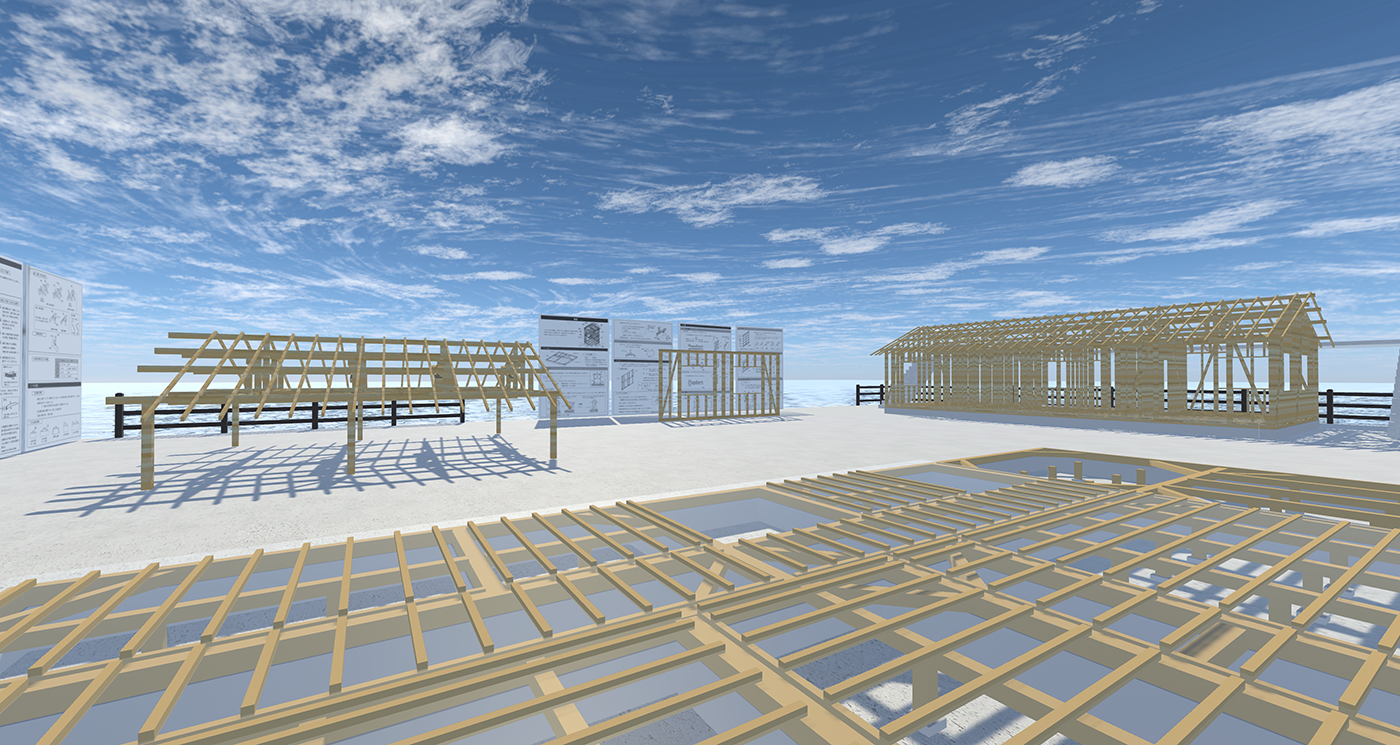
- メタバースを活用した建築分野の学習コンテンツの開発と評価
〇玉井 香里(愛知産業大学 通信教育部) - VRを活用した学習コンテンツは,さまざまな分野で研究が進んでいる.建築は立体物であり,二次元の教材では理解が難しい.メタバースを活用し3Dの教材で学習することで二次元の教材で学ぶよりも学習者の理解度が高まると考えられる.筆者はメタバース空間に,二次元のテキストのみでは理解が難しい木造の構造を学ぶためのワールドを開発した. 本研究では,建築を学んでいる学生を対象に教育実験を行い,その有効性を検証した.
口頭発表09:30-10:10 、ポスター発表10:55-11:40
モデル・計測・機構
- 3B1-01
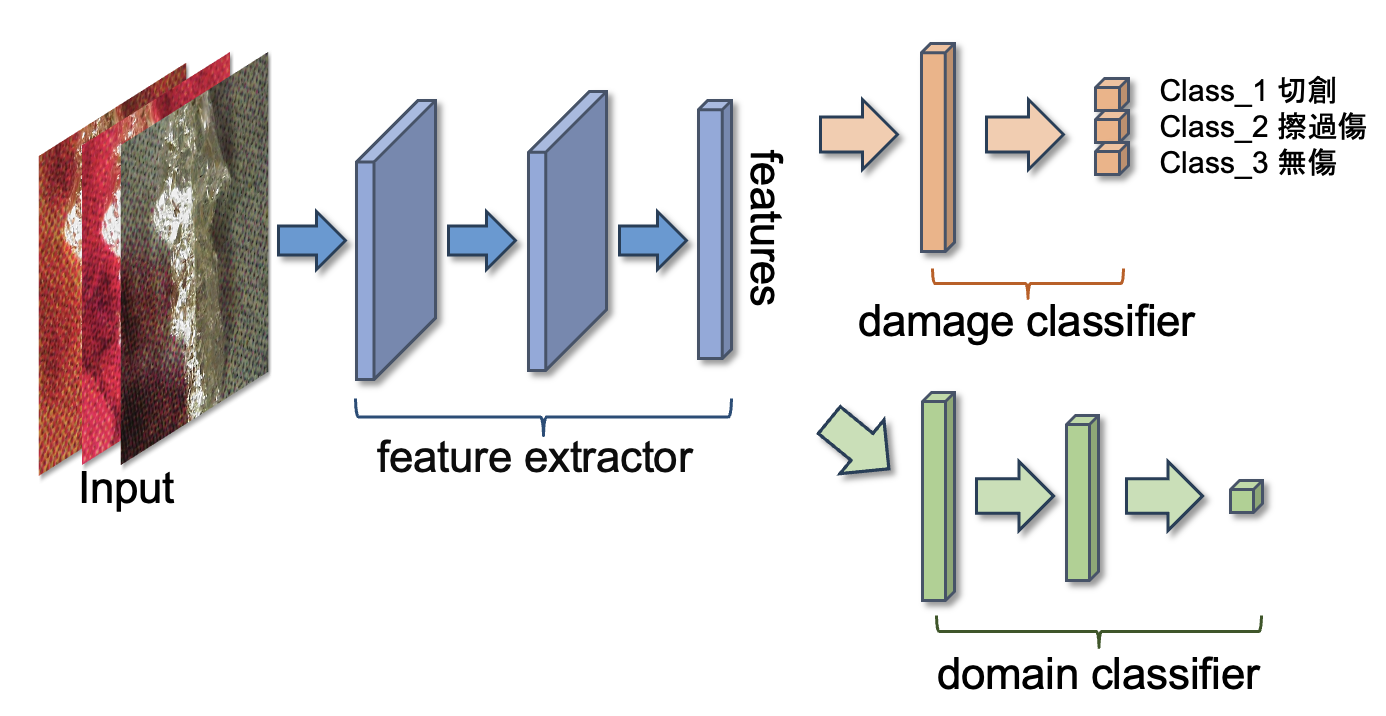
- ロボット皮膚のためのゲル痛覚センサ~ドメイン適応技術に基づく傷検出AIシステムの開発
〇周 智威(早稲田大学)、加藤 史洋(早稲田大学)、竹田 隼(早稲田大学)、岩田 浩康(早稲田大学) - 本研究ではロボットハンドへの適用を目指したゲル皮膚の割れや傷を検出するためのドメイン適応技術に基づくDANN手法を提案する。ゲル皮膚の傷は、切創、擦傷、および無損傷の3種類に分類される。NNの訓練のために収集した1440枚の画像を用いて訓練パラメータを最適化し、ドメイン分類器を導入することで、未学習の背景テクスチャにおける識別精度が71.2%から82.5%に向上した。検出された傷位置における傷口の面積を痛みの大きさとして計算することで痛覚センサを構成する手法を提案する。
- 3B1-02
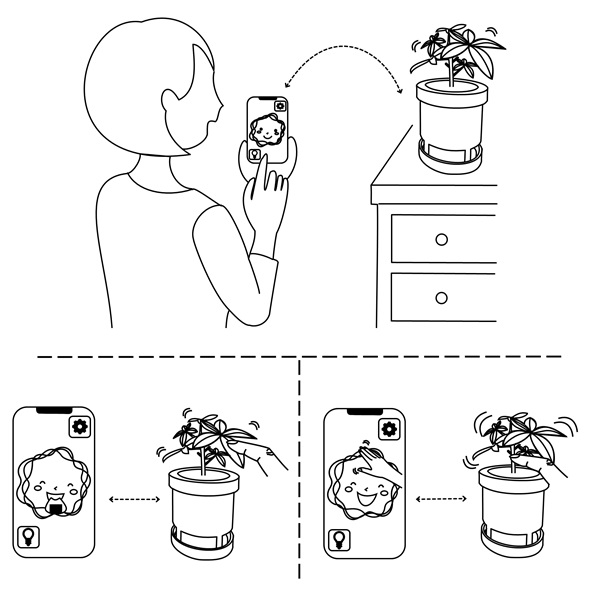
- 人と植物の物理的接触を拡張するシステム(第2報): 接触により育成する電子ペットの設計と接触部位推定の基礎検討
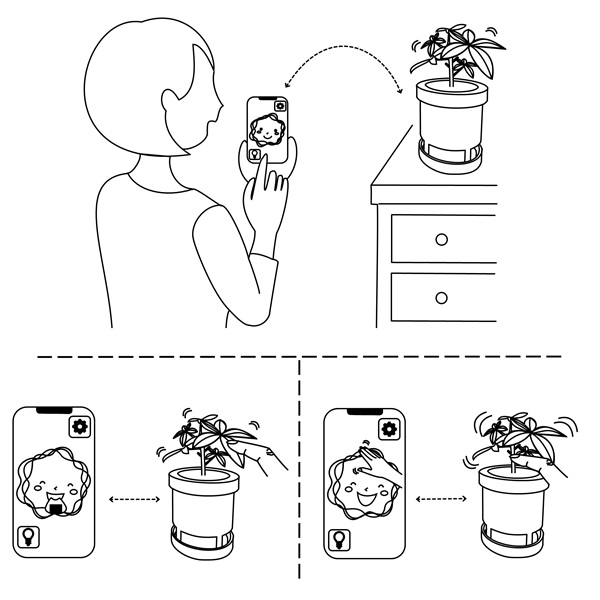
〇林 海歩(筑波大学)、蜂須 拓(筑波大学) - 我々はこれまでに人と植物との物理的接触を拡張することを目的に,接触を検知して植物から人へ触覚刺激をフィードバックする機能を搭載した植木鉢を開発してきた.しかし,計測は接触の有無の検知にとどまっており,接触位置に応じたフィードバック等のインタラクションの設計が限定的であった.本稿では,容量性センシングを用いた接触計測技術において,接触位置を高精度に推定可能な植物の検討について報告する.
- 3B1-03
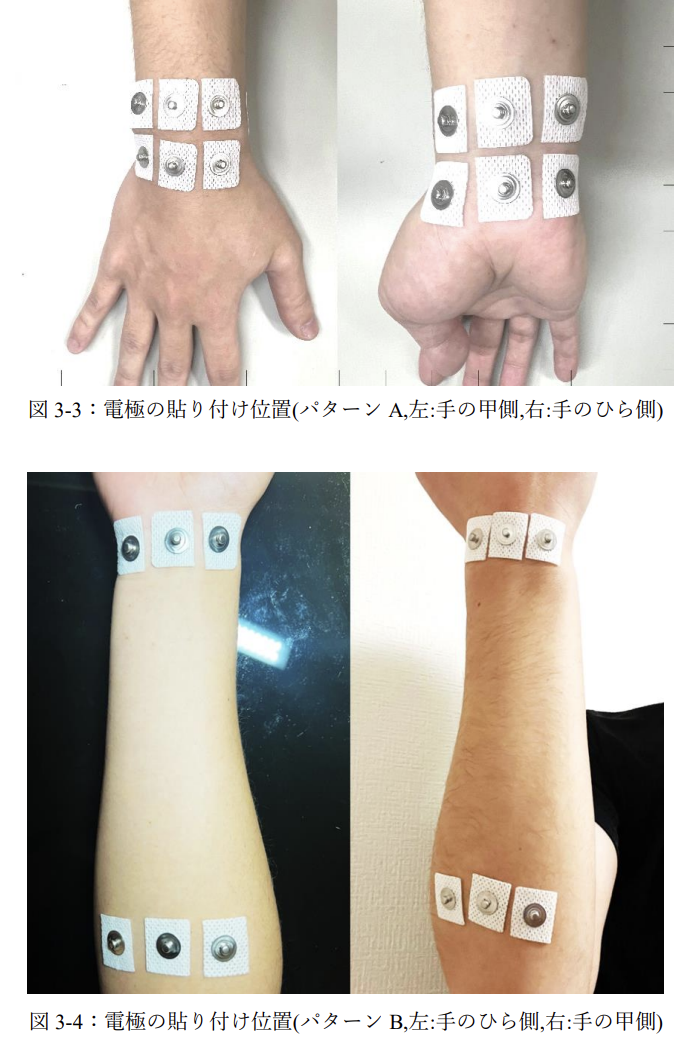
- 生体電気インピーダンスを用いた手指状態推定システムの開発- 第2報機械学習システムの構築 -
〇肖 博文(東京工科大学)、高橋 秀智(東京工科大学) - 手指状態の認識はHCIの分野において重要な役割を果たしている。そこで本研究では,3D空間上に手指の姿勢情報を入力できる,データグローブに代わる手指状態計測システムの開発を目指す。 本報では,計測サブシステムからの手指状態データとその状態における手首のインピーダンスデータから,機械学習によりインピーダンスから手指状態の推定を行うシステムの構築・評価を行う。
- 3B1-04
- 中野サンプラザを事例とした施設のデジタルアーカイブに用いる計測機器の比較評価
〇大和田 彬(国際航業株式会社)、加藤 誉之(国際航業株式会社)、和久津 龍太(国際航業株式会社)、玉川 絢登(国際航業株式会社)
- 3B1-05
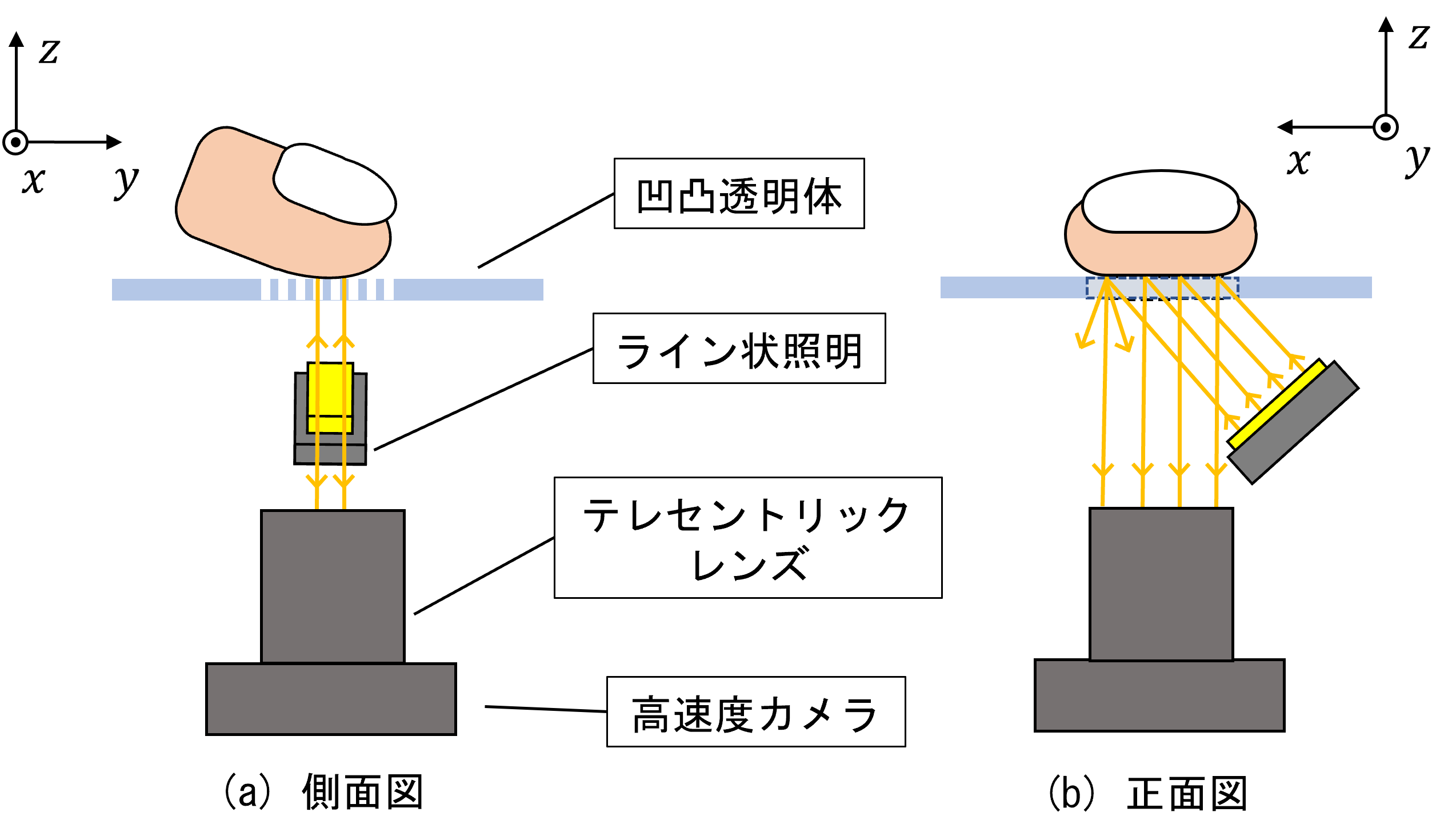
- 空気中での凹凸面なぞり時の指腹部の挙動の計測システムの精度評価
〇境 侑里(富山県立大学)、田川 和義(富山県立大学) - 筆者らは,指紋を考慮したStick-Slipシミュレータの構築を行っているが,その評価・改良のための指標を得るために,空気中での凹凸面なぞり時の指腹部の挙動の計測を,テレセントリック光学系(テレセントリックレンズ,凹凸透明体,高速度カメラを使用)を用いたシステムにより実現した.しかし,上記のテレセントリック光学系がマーカ追跡に与える影響(変位の誤差)がどの程度であるかの精度評価は行われていなかったため,その評価結果について報告する.
- 3B1-06
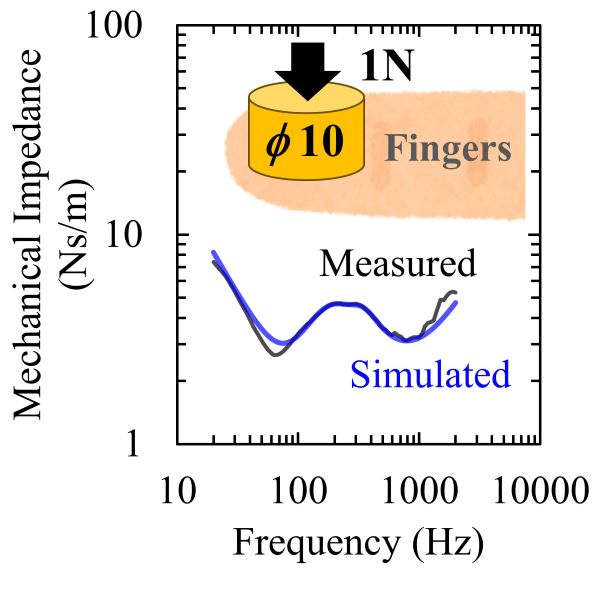
- 手指提示振動子の評価用カプラにおける機械モデルの構築
〇石川 愼一(リオン株式会社)、舟橋 史考(リオン株式会社)、足立 大(リオン株式会社) - イヤホン性能は装用状態の音響負荷に依存するため、負荷を模擬した音響カプラで性能を評価する。一方、手指の振動感覚を用いた研究が近年盛ん行われているが、使用している振動子を評価する振動カプラが定められていない。今回、手指提示振動子の評価用カプラを開発するために、リファレンスとなる接触面積φ10、静圧1Nにおける人間の指の機械インピーダンスを実測した。また、類推される機械モデルを報告する。
- 3B1-07
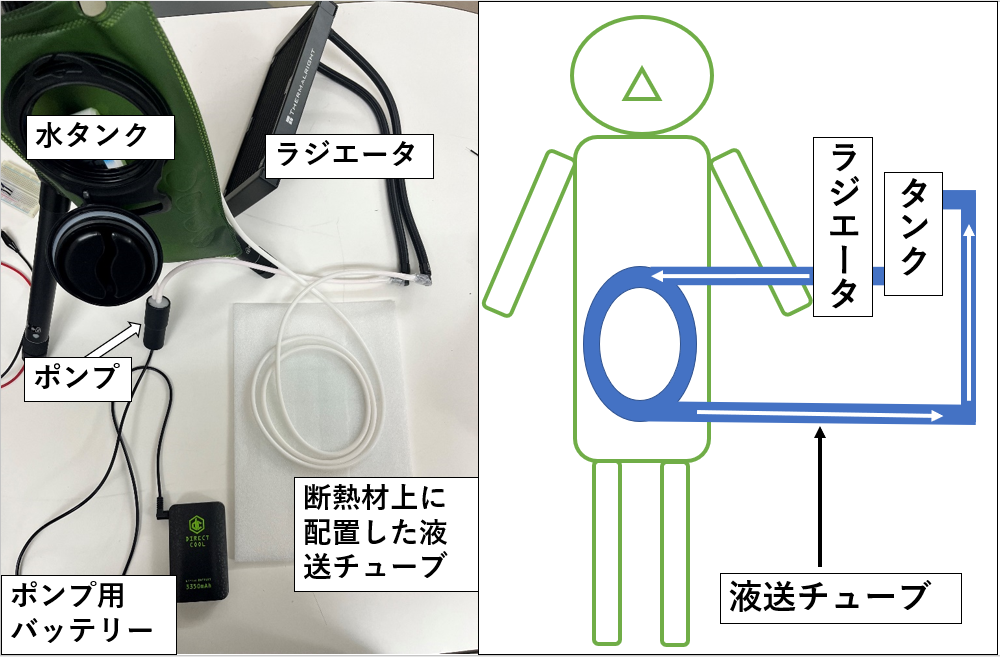
- 入眠潜時短縮にむけた深部体温調節のための体幹水冷システム
〇江畑 辰諒(筑波大学大学院)、橋本 悠希(筑波大学大学院) - 睡眠不足は心身共に悪影響を及ぼす。この問題を解消するための手段として,我々は入眠にかかる時間(入眠潜時)を短くすることに着目した。睡眠の前後では抹消皮膚温の上昇と深部体温の低下が同時に起きており、両者の体温変化が眠気を引き起こす(Kurt Kräuchi,1999)。本研究では,外部装置からの温度提示によって深部体温の冷却と抹消皮膚温の加熱をそれぞれ行うことで入眠潜時の短縮を目指す。本稿では,深部体温の冷却を行う冷却装置を設計・試作および評価した結果を報告する。
- 3B1-08
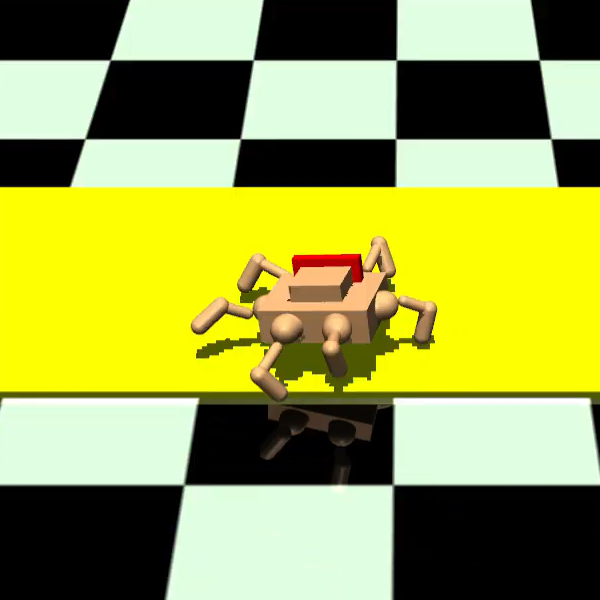
- 多脚ロボットの遠隔操縦システムの開発‐強化学習による6 脚ロボットの段差対応歩容の獲得‐
〇大山 渓介(東京工科大学)、高橋 秀智(東京工科大学) - ロボットの遠隔操縦で自動化技術の導入が進められている.この研究では,多脚ロボットの遠隔操縦におけるオペレーターの負担を軽減するため,環境に応じた歩行パターンを自動生成するシステムの開発を目指す.本報では,強化学習を用いて仮想空間で6脚ロボットに段差登り動作を学習させ,それを実機に適用した.実機を再現したモデルで高さ3 cmの段差を登る動作を学習させ,実機でその動作を検証した.
- 3B1-09
- 有限要素法を用いた経皮電気刺激の電極配置最適化システム
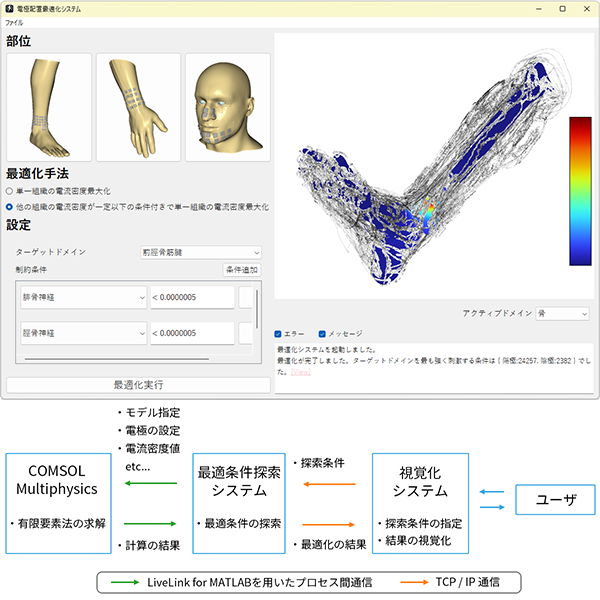
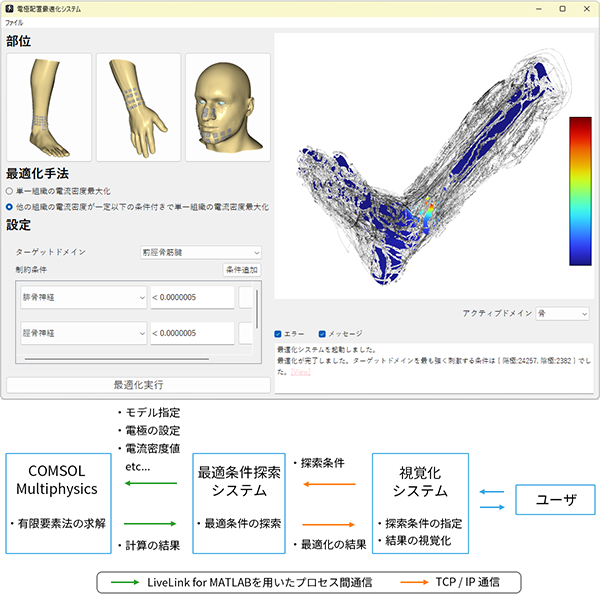
〇太田 貴士(東京大学大学院)、葛岡 英明(東京大学大学院)、雨宮 智浩(東京大学大学院)、青山 一真(群馬大学) - 経皮電気刺激において,電極配置は重要なパラメータの1つであるが,ヒトの身体は複数の組織が複雑な構造をなしているため,特定の組織を効率的に刺激できる最適な電極配置を直観的に同定することは困難である.本研究では,有限要素法による電流シミュレーション結果の全探索により,膨大な電極配置条件から最適な電気刺激条件を同定するシステムを構築し,筋や腱,神経束などが複雑な配置をなす下肢における電気刺激の電極配置最適化を例に,本システムの有効性を検証した.
- 3B1-10
- アバタの構造・動作の実装を効率化するツールキット「PoseSynth」の提案
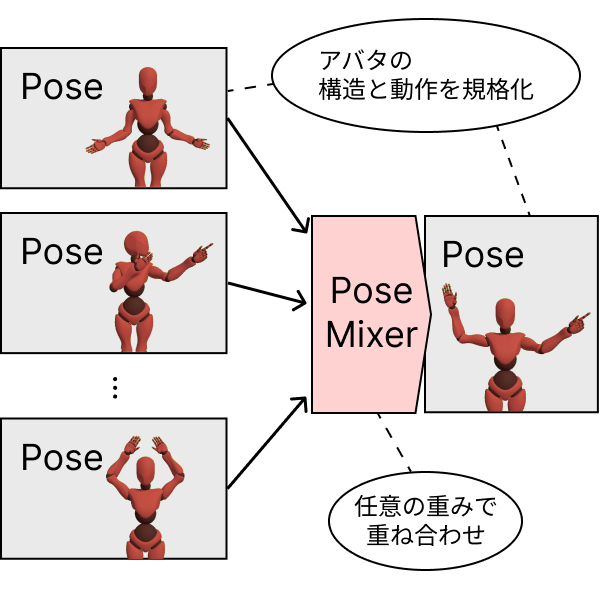
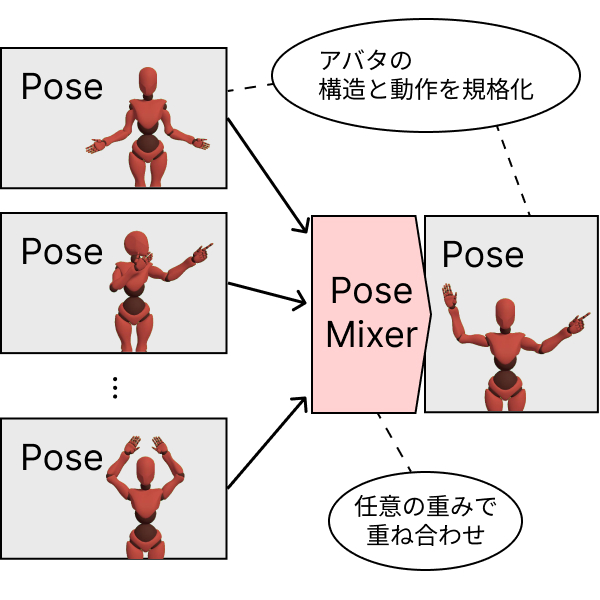
〇山口 周(東京大学)、畑田 裕二(東京大学)、橋浦 健太(東京大学)、鳴海 拓志(東京大学) - 現実の身体のあり方を超越した構造・動作を有するアバタは様々な研究領域で役立てられている一方で,その実装方法は様々であり,再利用が困難である.本研究では,アバタの構造・動作を扱うための規格を策定し,多様な構造を有するアバタの多様な動作を効率良く実装できるツールキット「PoseSynth」を提案する.PoseSynthはアバタの姿勢を変換して別のアバタの姿勢に代入する処理を繰り返すことで,様々なアバタの動作を効率良く実装できる.
- 3B1-11
- 節足動物のための 3D モーションキャプチャシステムの構築
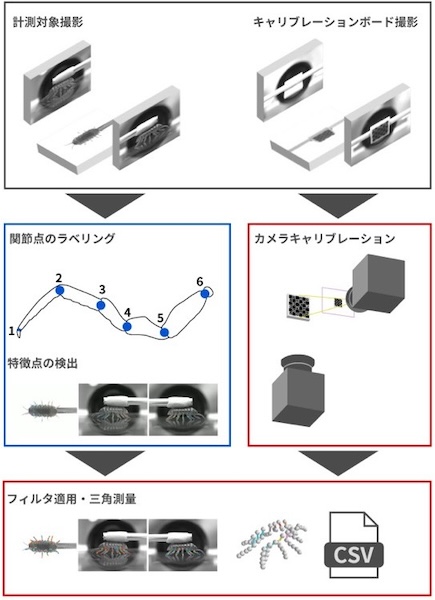
〇荒木 稜雅(京都産業大学)、田邊 匠(京都産業大学)、永谷 直久(京都産業大学) - 本研究は、オカダンゴムシの脚部を対象とした詳細な3Dモーショントラッキングシステムの構築を目指す。従来のシステムでは困難だった小型生物の動きの取得を可能にするため、DeepLabCutとAniposeを用いて腹側からの映像を利用した3次元姿勢推定システムを開発した。これにより、少ないカメラ台数で高精度なモーションデータの取得が可能となり、エンタテインメント分野への応用が期待される。
- 3B1-12
- 手作業における柔軟な物体表面とその接触領域の3次元復元
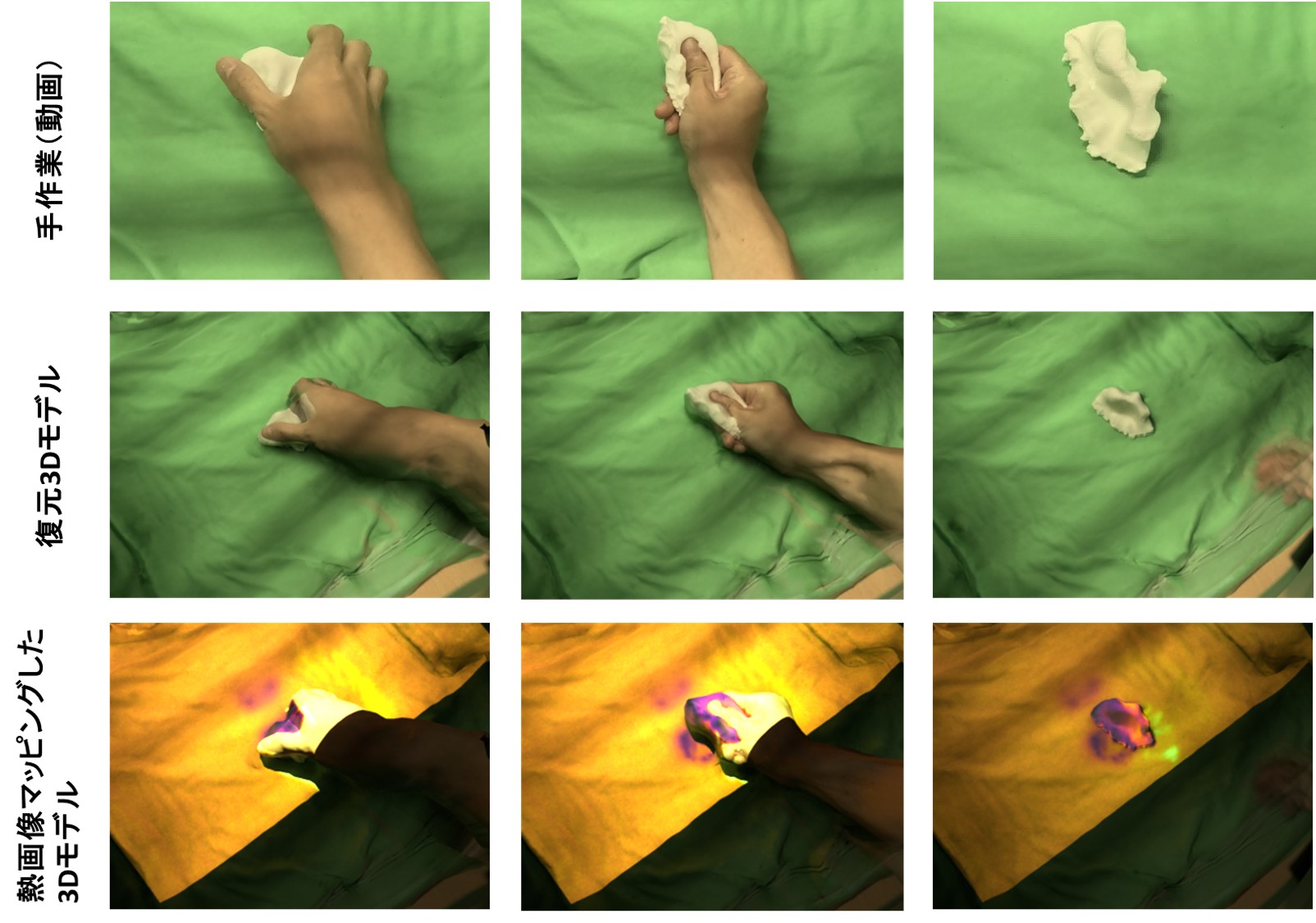
〇三浦 康平(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - カメラにより手作業を3次元データとして復元することで,VR/AR技術を用いた熟練者の手作業の追体験・学習が可能になる.対象物体に対し,実際に手が触れていた物体表面上の接触領域を物体にマッピングすることで,物体と手の相対位置の推定精度が向上し,より現実に即したデータが復元できる可能性がある.本発表では,手作業における対象物体の中でも特に,柔軟な物体の表面と表面上の接触領域を復元する手法を提案する.
口頭発表09:30-10:10 、ポスター発表10:55-11:40
触覚3
- 3C1-01
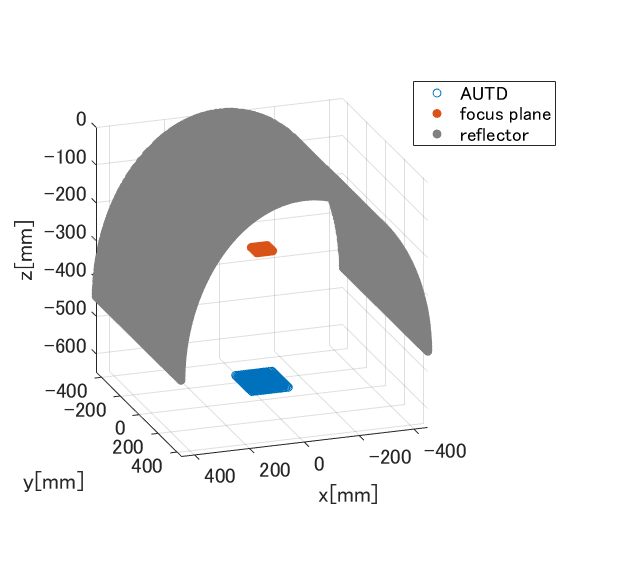
- 円筒型反射体を用いた空中超音波触覚提示の検証
〇池本 開(東京大学)、大谷 浩太郎(東京大学)、有賀 健太朗(東京大学)、松林 篤(東京大学)、牧野 泰才(東京大学)、篠田 裕之(東京大学) - 本研究では, 円筒型反射体を用いた触覚提示に必要な超音波の位相補正理論とそれを用いた検証結果を述べる. 反射波の収束には, 反射波の位相を揃えるように初期位相を決める必要がある. レンズの公式を円筒湾曲方向に適用し, さらに円筒高さ方向の位置関係から仮想音源の座標を求めることで位相補正を行った. その理論を用いた検証により, 焦点形成面における任意の箇所に焦点を形成できることが確認できた.
- 3C1-02
- 外界を表現する立体振動ディスプレイ 第10報:胴体装着型立体振動デバイスの定位精度評価
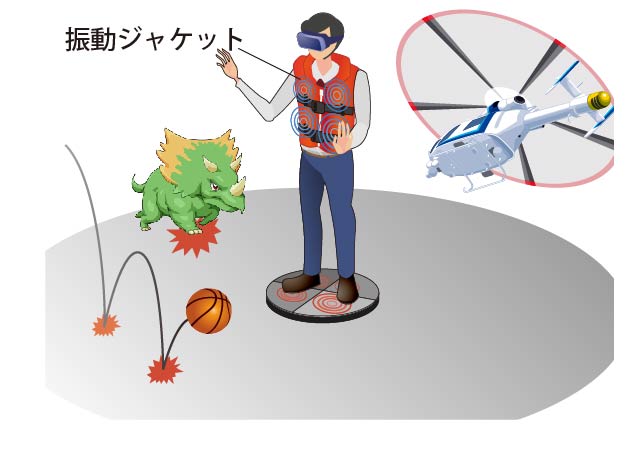
〇大原 玄(東北大学)、昆陽 雅司(東北大学)、田所 諭(東北大学) - 立体振動は,外界の振動源を定位させる,従来のファントムセンセーションによる定位を革新する振動触覚技術である.これまでに前腕や足裏の立体振動デバイスを開発したが,定位が装着部位周辺や床面上に限られ,身体周辺を上下左右に定位させることは難しかった.そこで我々は身体周辺を表現するために胴体装着型の振動デバイスを開発し,立体振動のアルゴリズムで駆動した場合の定位精度を測定しその有効性を報告する.
- 3C1-03
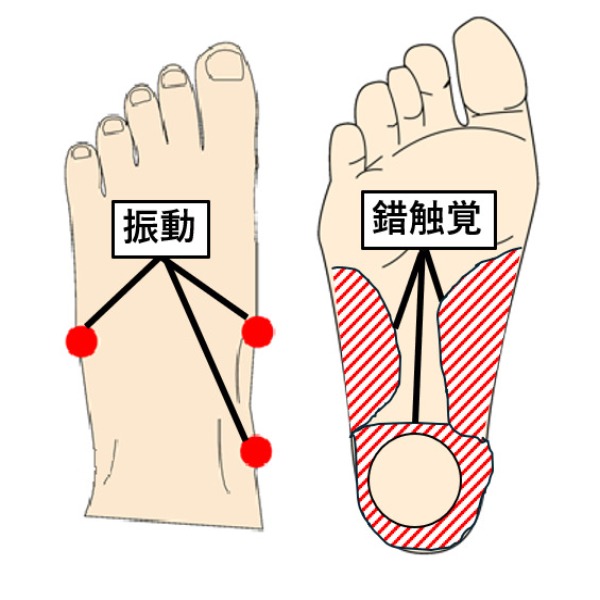
- 足背部・足根管部への振動刺激による中足部・後足部への足底錯触覚提示
〇鳥谷部 孝大(筑波大学)、橋本 悠希(筑波大学) - 我々は,足背側に振動刺激を加えることにより,足底でその振動を知覚する足底錯触覚提示手法を用いて,歩行時に本来の地面環境を阻害せずに新たな触覚を重畳する取り組みを行っている.これまでの研究では,前足部の広範囲で本錯触覚の生起が確認されているが,中足部および後足部への範囲拡大が課題であった.本稿では,足背部および足根管部への振動刺激に対する本錯触覚の生起有無を検証し,中足部および後足部に対する足底錯触覚提示の可能性について報告する.
- 3C1-04
- 振動分布を再現する腕輪型触覚デバイスによる動作体感の伝達ー第10報:手指伝播特性に基づく個人差補正法を利用した2者間の動作再現
〇新居田 崇家(東北大学)、松原 亨(東北大学)、和賀 正宗(東北大学)、昆陽 雅司(東北大学)、田所 諭(東北大学) - 我々は,これまでに手首に伝わる振動を計測・提示する腕輪型触覚デバイスを提案している.前報では力加減を統制することで,手指伝播特性に基づく個人差補正法が有用である可能性を報告した.本報では,2者間の動作再現において,個人差補正法を適用することで被験者が目標の動作タスクの力加減を上手く再現することができるかについて検証する.
- 3C1-05
- 呼吸運動を模した空中超音波刺激による仮想的な動物とのインタラクション
〇細井 十楽(東京大学)、金 杜(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - 動物とのインタラクションはアニマルセラピーや教育等の観点から需要が大きい。一方で、実際の動物との触れ合いは、アレルギーや外傷との危険性、倫理性の観点から制約がある。本研究では、非接触に触覚刺激を提示可能な空中超音波刺激を用いた仮想的な動物とのインタラクション体験において,呼吸運動を模擬した視触覚刺激を提示することを提案した.猫とのインタラクションを行う実験によって,猫の呼吸運動を視触覚的に提示することで,猫の生き物らしさについての主観評価が向上することを確認した.
- 3C1-06
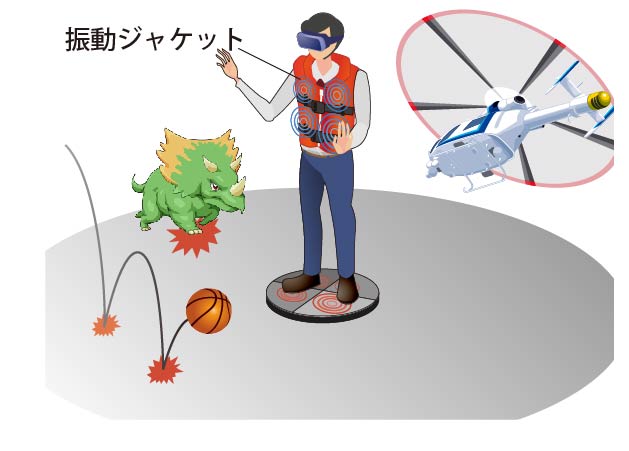
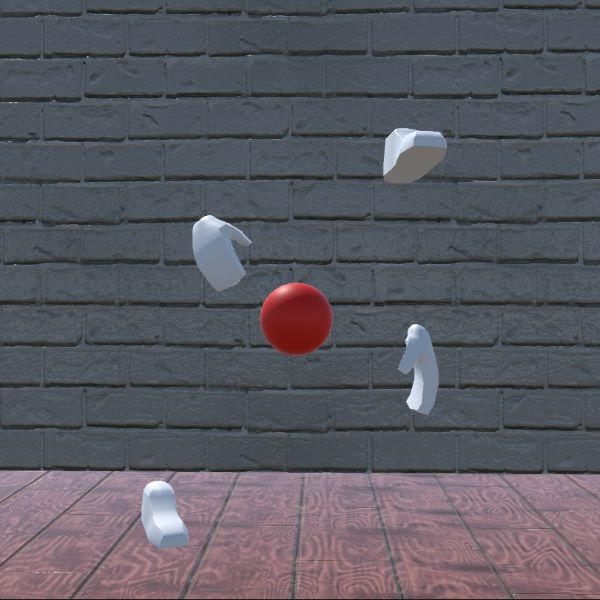
- 振動・熱刺激を用いたしびれ感覚の提示による衝撃感の向上
〇藤田 光(東京大学)、細井 十楽(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - VRにおいて衝撃感提示に関する多くの研究が行われてきたが,衝撃後の残効に関する研究は少ない.本研究では,残効の一つであるしびれ感覚を再現する振動・熱提示の効果を調査する.野球の打撃を再現した仮想環境と振動・撃力・熱提示が可能なデバイスを作成し,実験を実施した.結果,振動・熱提示がしびれ感覚を再現し,衝撃感を向上させることが確認された.特に高周波の振動がしびれ感覚と衝撃感のリアリティ向上に有意に作用した.

- 3C1-07
- デジタル空間における複数人触覚インタラクションに向けた間主観性デザインの基礎検討 ~他者の身体への視覚的介入~
〇森田 迅亮(慶應義塾大学大学院メディアデザイン研究科)、パーソン タナー(慶應義塾大学大学院メディアデザイン研究科)、梅原 路旦(慶應義塾大学大学院メディアデザイン研究科)、脇坂 崇平(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科)、堀江 新(慶應義塾大学大学院メディアデザイン研究科) - 現実空間において対象物を通じて触覚のやり取りを行う際,人は他者の意図や感覚を的確に読み取ることができる.一方で,デジタルな空間においては他者の感覚を保証する物理的な制約が存在しないため,他者の感覚状態を推定することは困難である.そこで本研究では複数の主体がXR空間で触覚インタラクションを行う際の体験設計として間主観性デザインを提案し,それを適用した体験の基礎的な検討を行う,特に,相手の身体上に視覚的な表現を加えることによって自己が物体から受ける感覚が変化するかを評価する.

- 3C1-08
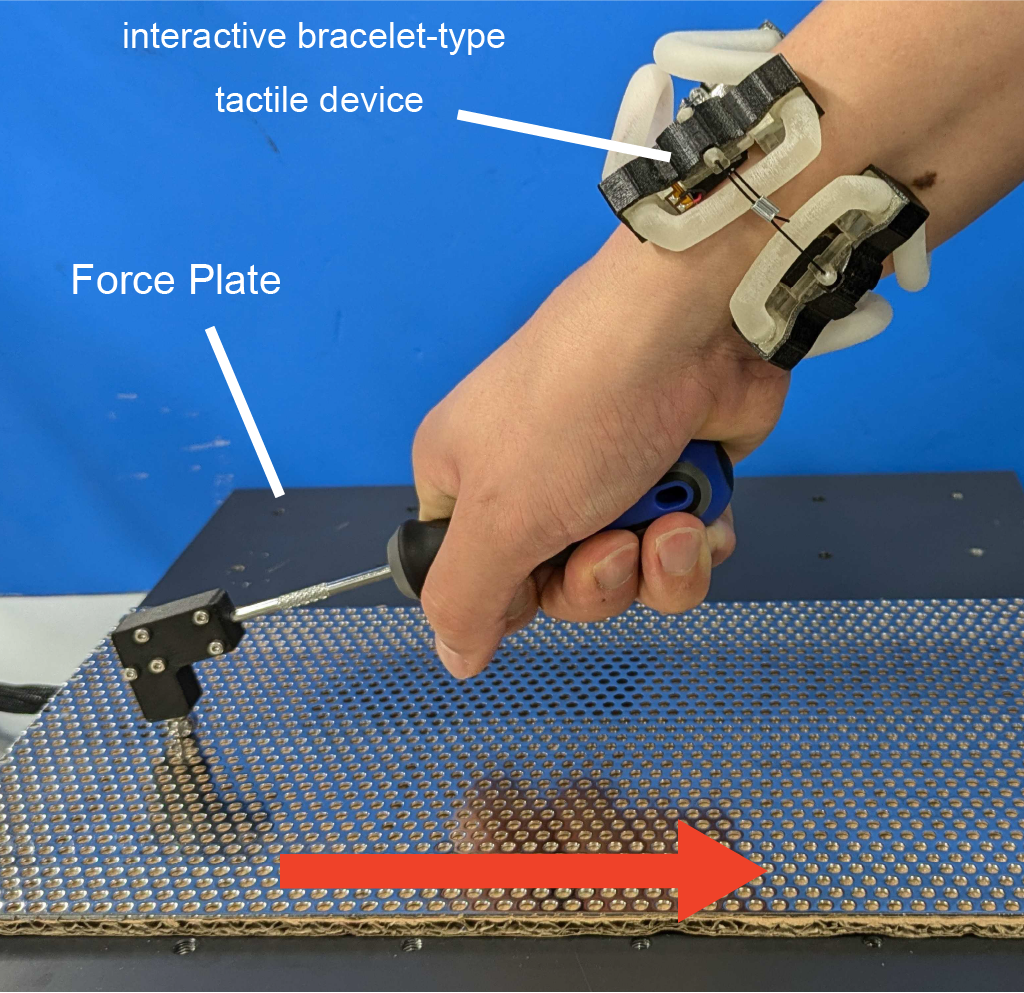
- テレロボットにおける安定した物体把持のための回転中心とモーメントの推定
〇街道 一翔(立命館大学)、柚 空翔(立命館大学)、安藤 潤人(立命館大学)、寒川 雅之(新潟大学)、野間 春生(立命館大学) - 本研究では,テレロボットの物体把持状態を検出して操作者に伝えることを目的とし,圧力と剪断力を計測可能なMEMS触覚センサを4つ用いた,センサの出力から回転中心とモーメントを推定可能なマイクロフォースプレートを開発した.評価実験ではフォースプレート上のある点を中心に回転をかけ回転中心を推定した.実験の結果,フォースプレートの中央付近の回転中心において推定値との誤差は0.7 cmとなり比較的正確に推定できた.
- 3C1-09
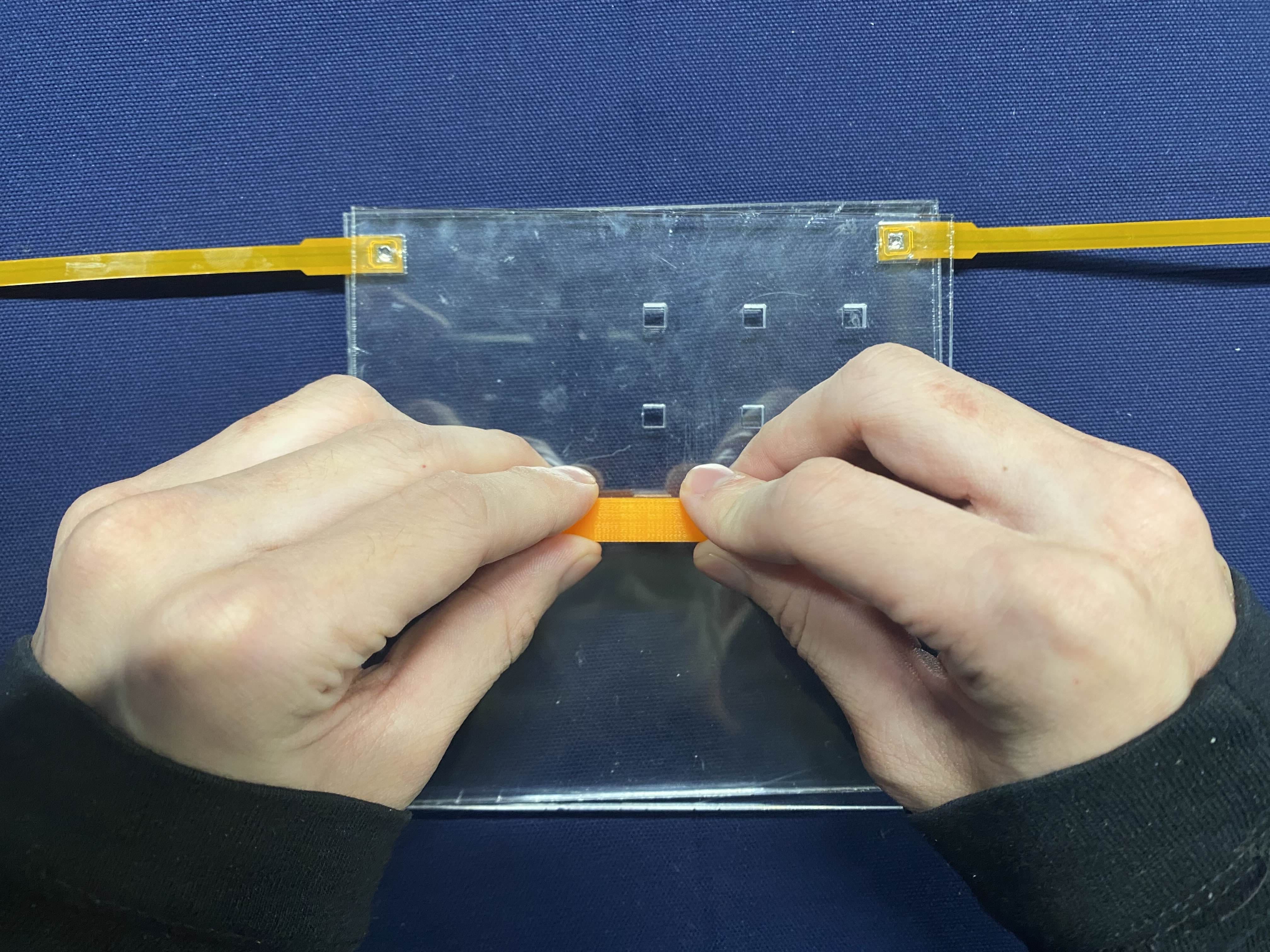
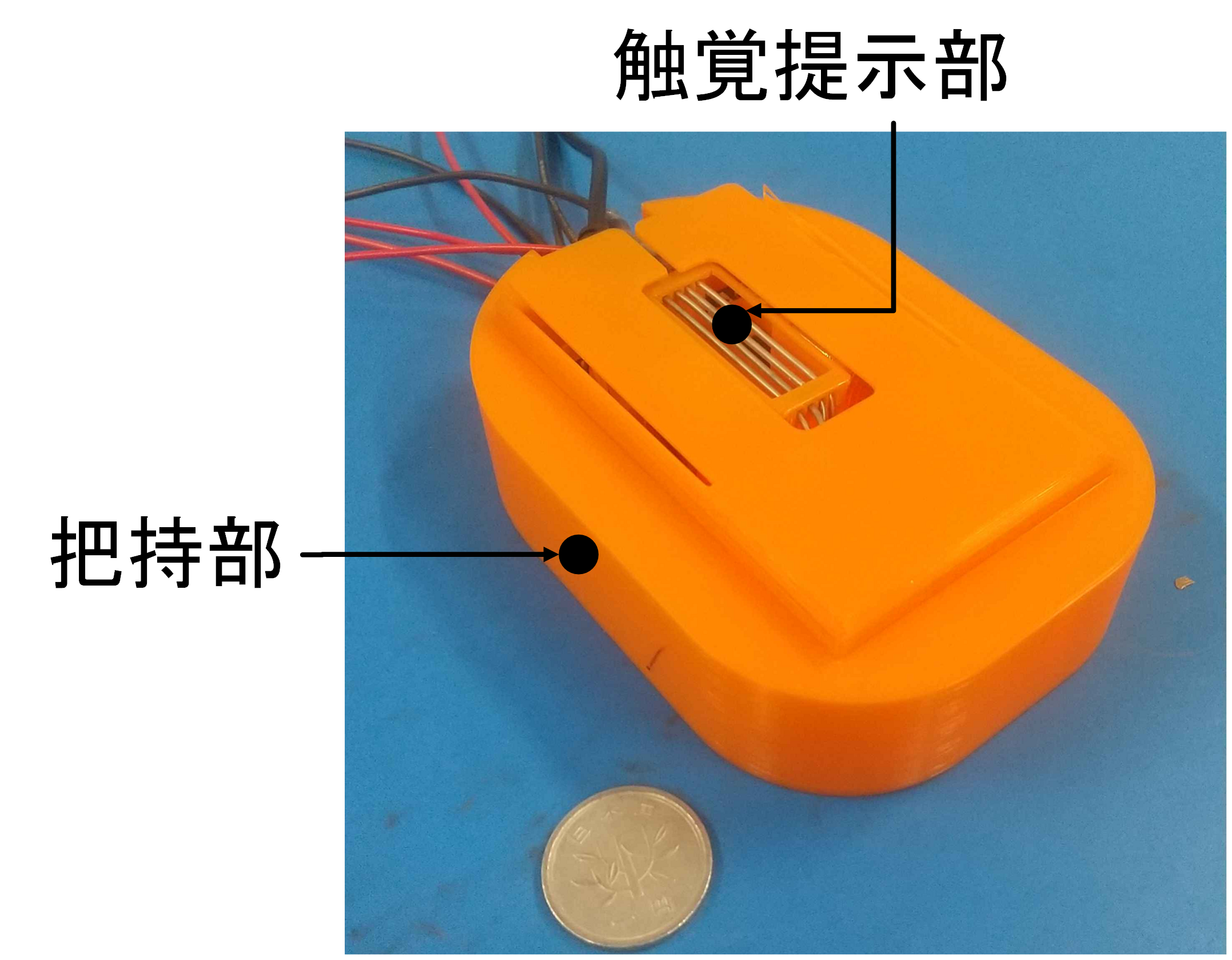
- ソフト振動アクチュエータを用いた仮想物体の表面の質感を能動的に探索するための触覚提示システム
〇黒川 朝陽(立命館大学)、清水 真陽(立命館大学)、安藤 潤人(立命館大学)、野間 春生(立命館大学) - 本研究の目的はネット上で仮想物体の表面テクスチャ感を能動的に探索できる触覚提示システムを開発することである.そのために,光学センサと触覚ディスプレイを備えたデバイスと,デバイスの動きに応じて振動を提示するシステムを開発した.評価実験では異なる線幅の縦縞の触覚表現を識別するタスクから,知覚できる細かさを調査した.その結果,線幅が0.16 mm以上で触覚表現の細かさを知覚できることが示された.
- 3C1-10
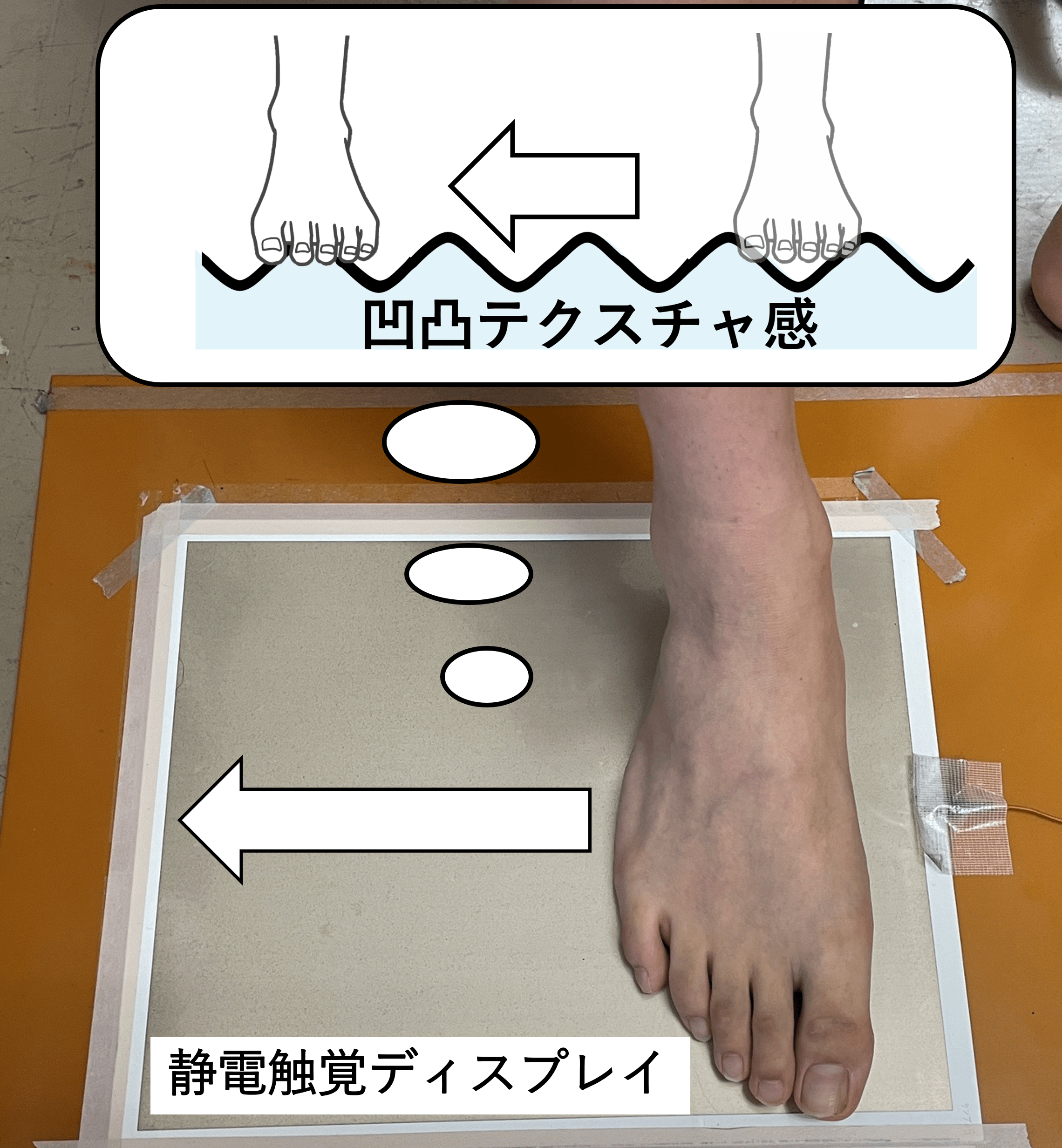
- 足底への静電触覚刺激における素足と靴下着用時の知覚の違い
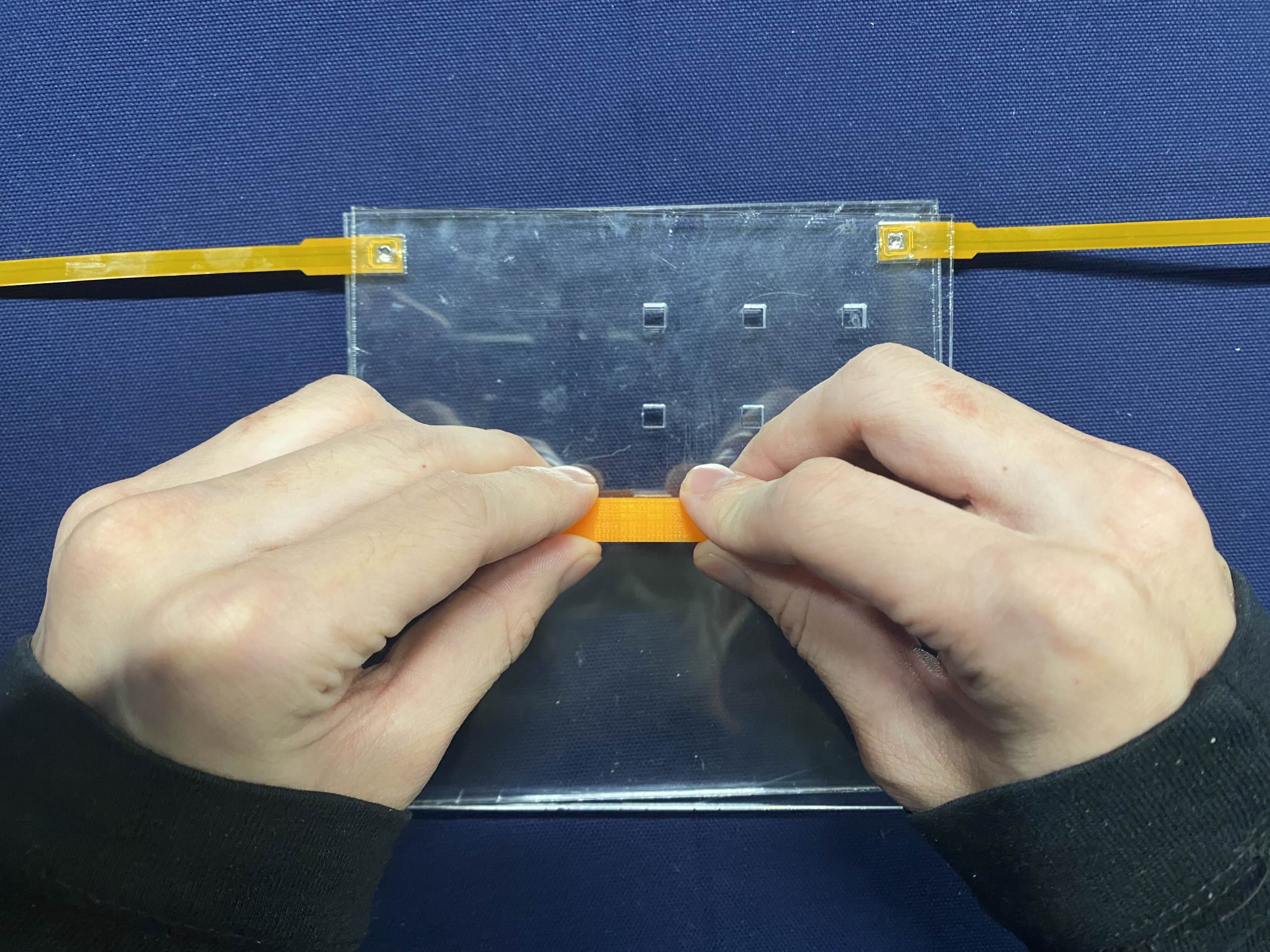
〇阿部 瑚南(筑波大学大学院)、橋本 悠希(筑波大学大学院) - 我々はこれまで, 静電触覚技術と紙エレクトロニクス技術を組み合わせたプリンタブル静電触覚ディスプレイを用い, 手部全体を用いた大面積の触覚インタラクションを提案してきた. 本ディスプレイを足底に使用した結果, 素足と靴下を履いた状態でも知覚することができた. 過去に肌の水分保有量が多いと触覚が知覚しにくいと報告された.そのため,実際に本ディスプレイを足底で使用する際には靴下を履くことが望ましいと考えられる.そこで本稿は,素足と靴下(綿100%)の知覚閾値を比較し,靴下(綿100%)を履いた状態での触覚提示の可能性を検証した結果を報告する.
- 3C1-11
- 陶芸技能の伝承に向けた触覚提示システムの応用可能性の検討
〇朱 宇凡(慶應義塾大学大学院メディアデザイン研究科)、堀江 新(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 伝統工芸の職人の技能は身体知となっており、形式知化が難しいためその伝承方法が課題となっている。本研究は、職人の筋肉活動を計測し、感覚情報を直接に触覚によって提示することで、陶芸初心者に対して熟練者の技能への理解を深める技能伝承システムを提案する。提案したシステムを陶芸専門家や一般ユーザーに使用してもらい、システムのユーザー体験の評価に基づき、システムの陶芸技能伝承における応用可能性を論ずる。

- 3C1-12
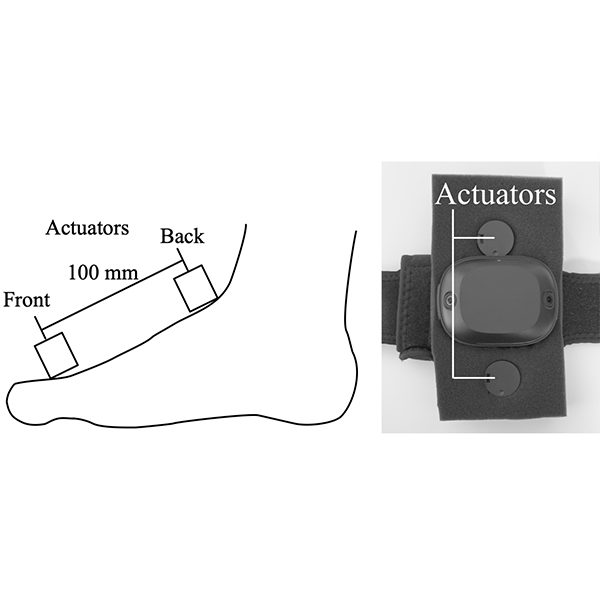
- 足の甲への振動触覚刺激による歩行感覚の生成
〇伊藤 充(三菱電機株式会社)、小川 勇(三菱電機株式会社)、雨宮 智浩(東京大学) - 我々は足の甲への振動触覚刺激による歩行感覚を調査した.足裏への振動刺激は座位や立位で歩行感覚をもたらすが,圧力で刺激が減衰する.この課題に対し,足の甲を刺激するため片足に2つのアクチュエータを使用し疑似歩行刺激を提示した.本システムは,刺激知覚とエネルギー効率に優れる.予備実験では,被験者が足の甲に装着した触覚デバイスを体験し,触覚的な見かけの動きが歩行感覚を向上させると報告した.
口頭発表09:30-10:10 、ポスター発表10:55-11:40
身体性認知1
- 3D1-01
- セルフリオネット:指先力入力システムによる全身アバタ操作と多様な触覚インタラクションの実現
〇平尾 悠太朗(奈良先端科学技術大学院大学)、橋本 健(東京大学)
- 3D1-02
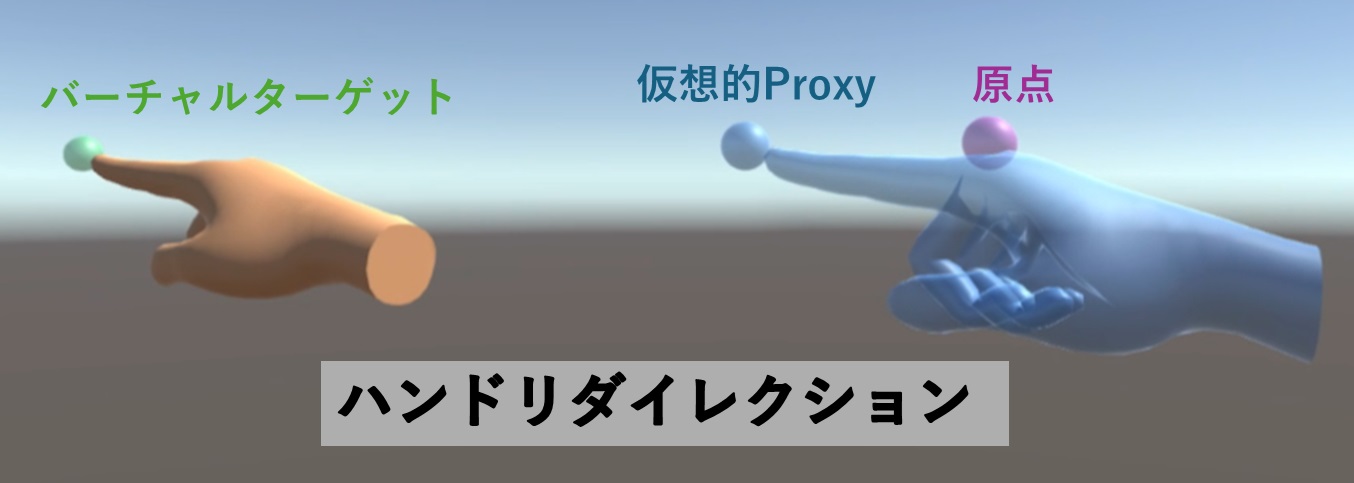
- ハンドリダイレクションを用いたリーチング運動に適用可能なゲインの調査
〇金谷 崇文(東京大学)、中村 拓人(東京大学)、松本 啓吾(東京大学)、葛岡 英明(東京大学) - ハンドリダイレクション(HR)とは現実の手と異なる位置・姿勢にVR空間上の手を視覚提示する技術であり,リハビリテーションの分野で手のリーチング距離を延長して訓練効果を高めることが期待されている.HRは行為主体感などの主観評価を低下させる可能性があるため,適用可能なゲインを明らかにする必要がある.本研究では,異なるゲインを提示してリーチングタスクを行うことで主観評価の変化を検証し,適用可能なゲインを求めた.
- 3D1-03
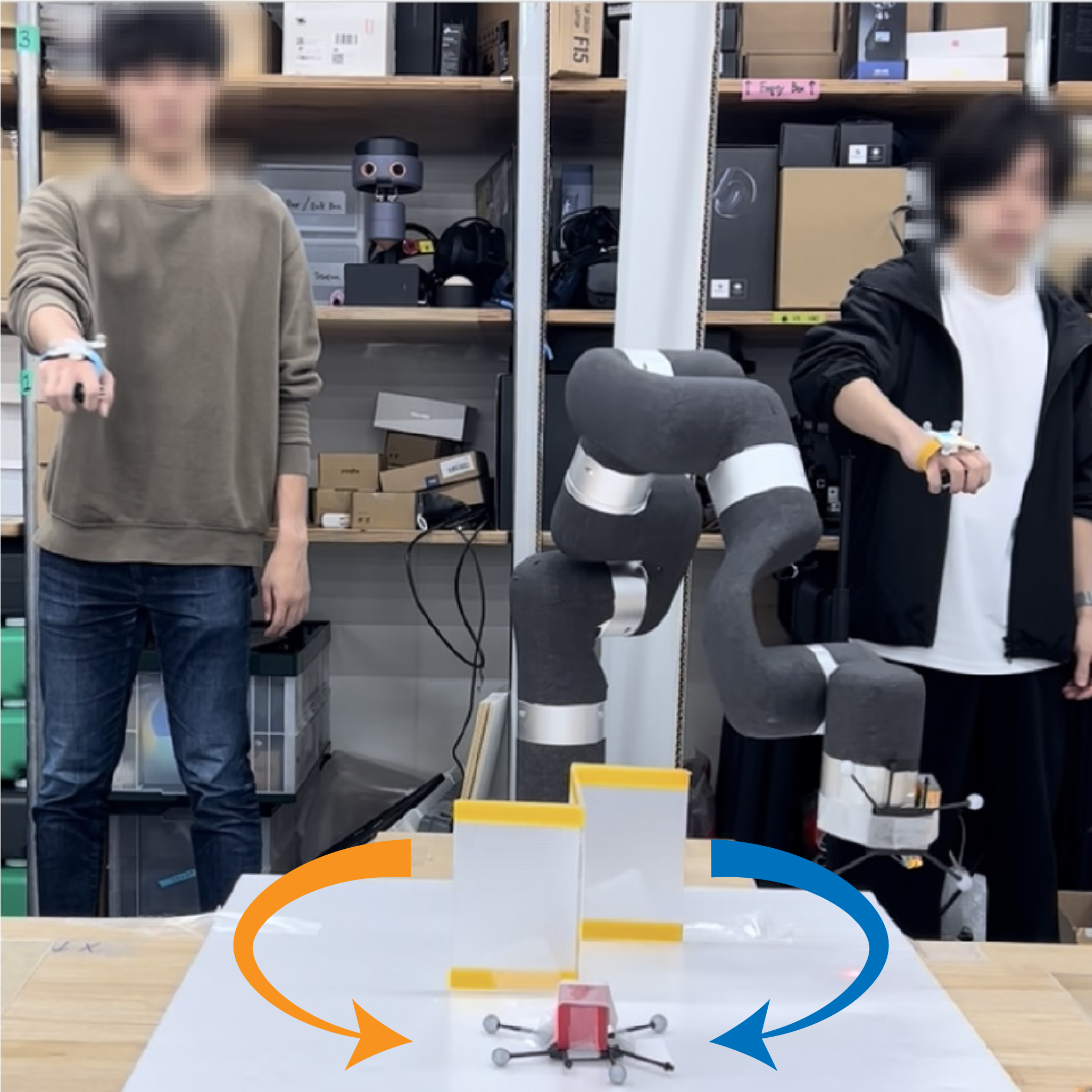
- ロボットアバターを通した自己データとの融合による運動学習に関する予備的検討
〇萩原 隆義(慶應義塾大学大学院メディアデザイン研究科)、湯川 光(名古屋工業大学)、脇坂 崇平(慶應義塾大学大学院メディアデザイン研究科)、田中 由浩(名古屋工業大学)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 2人で1つのアバターを操作する「融合アバター」に関する研究では、参加者2人を融合する手法や、事前に記録した教師役データと融合する手法が用いられてきた。本研究では、事前に記録した自分自身のデータと融合することによる運動学習効果について予備的検討を行った。自分自身との融合は、相手とのタイミング調整などが必要なく、自己の技能を再投入することにより、従来の運動学習とは異なる効果が期待できる。
- 3D1-04
- 幼児の身体化感覚における手足の視覚運動同期と空間配置の効果
〇吉田 優太(豊橋技術科学大学)、板倉 昭二(立命館大学)、北崎 充晃(豊橋技術科学大学) - 成人では,手足のみが身体運動と同期する「透明身体」に対してフルボディアバターと同程度の身体所有感,行為主体感が生じる.本研究では4歳から5歳の幼児における透明身体への身体化感覚に,身体運動の時間的同期性と身体配置の空間的整合性が与える影響を調べた.その結果,幼児では非同期・非整合の条件でも,同期・整合の条件と同程度の身体化感覚が誘発された.
- 3D1−05
- 共同リズム動作の学習における融合身体の効果
〇福田 晴紀(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学) - 二者が互いを見ながらリズム動作を行うと,個々の運動軌道と二者間の同期が安定化することが知られている.本研究では,共同リズム動作練習における融合身体の使用が個々の運動と二者間の同期性を改善するか検証した. 実験の結果,融合身体の使用を通じ個々の動作が安定しやすいテンポ・リズム条件があることが示された.一方,一部の条件で融合身体の使用中にのみ二者間の運動同期の安定性が上昇することが示された.

- 3D1-06
- 融合身体を用いた対称性のあるアバタインタラクションにおける相手アバタに対する身体性生起に関する基礎調査
〇後藤 拓海(電気通信大学)、櫻井 翔(電気通信大学)、野嶋 琢也(電気通信大学)、広田 光一(電気通信大学) - 複数人の動作を合成したアバタである融合身体は互いの姿勢を加重平均し,一人称視点で身体を共有する.本研究では2人で行う対称性のあるインタラクションに融合身体を導入し,一人称視点からも第三者視点からも融合身体と相互作用できる環境を作成した.実験を通して,自身や相手に適用する融合の有無やアバタの外見の同一性によって,インタラクションの相手に対して生起される身体性に影響を及ぼすかを調査した.
- 3D1-07
- ポータルを使った身体の分裂と自己位置の拡張
〇近藤 亮太(東京大学)、杉本 麻樹(慶應義塾大学) - バーチャル身体を左右に分裂させ,それに所有感を誘発することで,自己位置が拡張される。しかし,分裂によって所有感は弱くなること,身体近傍空間外の身体には所有感が生じないことがわかっているため自己位置の拡張範囲には限界がある。本研究では,ポータルを使って身体のつながりを補完することで,分裂した遠くの身体に所有感が生起し,自己位置が拡張されるか調べた。

- 3D1-08
- リアルアバターを用いた自己他者認知に関する基礎的検討
〇丸山 翔大(早稲田大学)、河合 隆史(早稲田大学) - VRにおいて、3Dスキャンによるリアルアバターを使用することは、どのようなユーザー体験をもたらすのか。本研究では、自己のリアルアバターと他者のリアルアバターを使用する場合で、自己身体感覚にどのような影響があるか調べるとともに、他者が自己のリアルアバターを使用する場合、ユーザーは他者に対してどのような対人認知に至るのか、基礎的な検討を行った。

- 3D1-09
- 融合身体における意思決定過程とリーダーシップの動態
〇橋浦 健太(慶應義塾大学、東京大学)、高田 一真(慶應義塾大学、沖縄科学技術大学院大学)、萩原 隆義(慶應義塾大学)、脇坂 崇平(慶應義塾大学)、南澤 孝太(慶應義塾大学) - 加重平均型融合身体は,参加者同士の協力により認知負荷を分散させ,1人で操作することが難しい動きの達成や運動学習の促進が図られている.これまでの実験では,2人の参加者が"協力"して課題を達成していたが,協力している間に生じる意思の"競合"についてはほとんど着目されていない.そこで本研究では,2人が部分的に競合する意思決定過程を含むリーチング課題を実施し,参加者が競合をどのように解決するのか調査した.
- 3D1-10
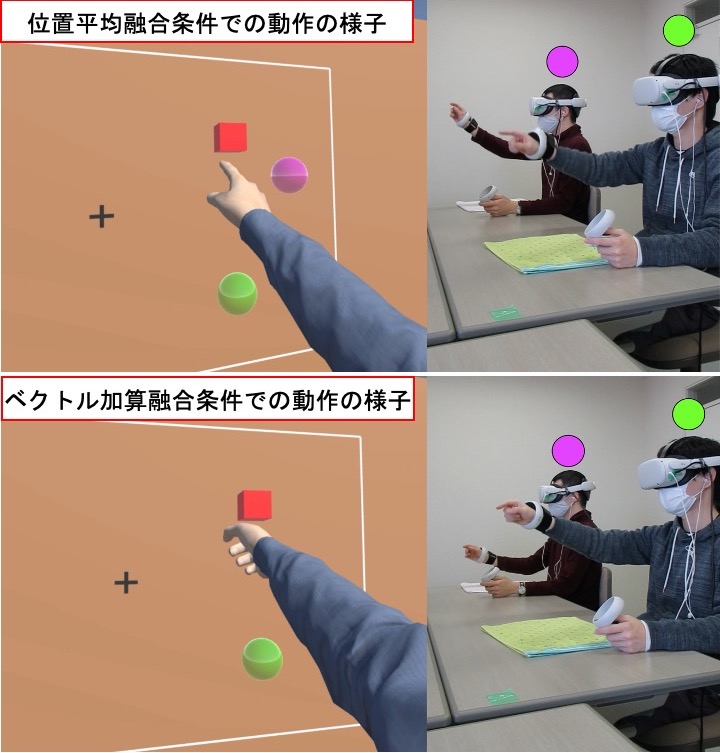
- 融合身体下での動作における融合方法の比較ー位置平均方式とベクトル加算方式ー
〇森田 磨里絵(立命館大学 情報理工学部)、藤原 侑史(立命館大学 情報理工学部)、中村 哲朗(立命館大学 情報理工学研究科)、松室 美紀(Department of Communication, Cornell University)、柴田 史久(立命館大学 情報理工学部)、木村 朝子(立命館大学 情報理工学部)、北川 智利(立命館大学 BKC社系研究機構、吉賀心理学研究所) - 1つのVRアバタを複数人が同時に操作する融合身体を用いると,各個人が単独で動作を行うよりも運動効率が高まる.本研究では,複数人の動作の融合方式として,操作者らの動作ベクトルを加算した結果をアバタに反映させるベクトル加算方式を採用した融合身体システムを構築した.これまでの研究で広く採用されている,操作者らの身体位置の平均をアバタに反映させる位置平均方式での融合と比較し,ベクトル加算方式を採用した融合身体下での身体動作の特徴について議論する.
- 3D1-11
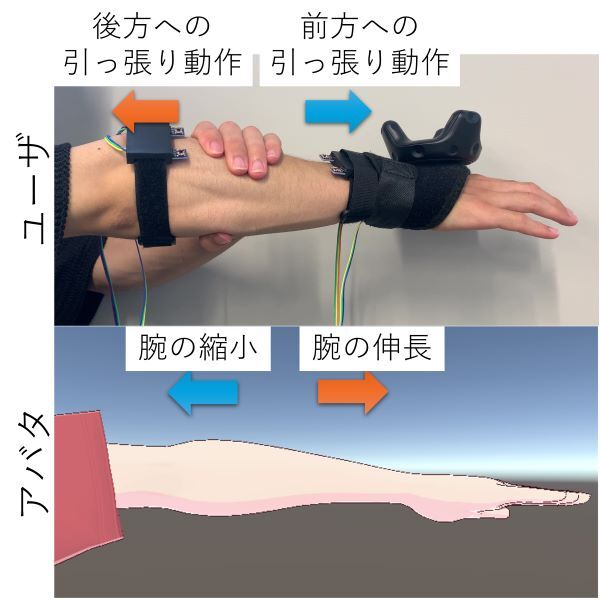
- 引っ張り動作による前腕の皮膚変形計測に基づいたアバタの腕の伸縮
〇小山 裕雅(立命館大学大学院)、中村 文彦(立命館大学大学院)、木村 朝子(立命館大学大学院)、柴田 史久(立命館大学大学院) - 本研究では,前腕の引っ張り動作を用いてアバタの腕を伸縮する手法を開発した.前腕の引っ張り動作に伴う皮膚変形を反射型光センサによる計測と機械学習によって認識し,認識結果を基にアバタの腕を伸長・収縮した.本手法がリーチング課題におけるパフォーマンス・身体認知に与える影響を検証するために,ユーザ実験を行った.実験結果から,前腕を引っ張る動作により,自身で腕を伸縮している感覚が強くなることが示唆された.
- 3D1-12
- バーチャル共有身体での手位置追跡課題における心拍同期の研究
〇Cedillo Rorek(豊橋技術科学大学 大学院工学研究科 情報・知能工学専攻)、HAPUARACHCHI HARIN(豊橋技術科学大学 大学院工学研究科 情報・知能工学専攻)、北崎 充晃(豊橋技術科学大学 大学院工学研究科 情報・知能工学専攻)
口頭発表09:30-10:10 、ポスター発表10:55-11:40
ユーザインタフェース
- 3E1-01
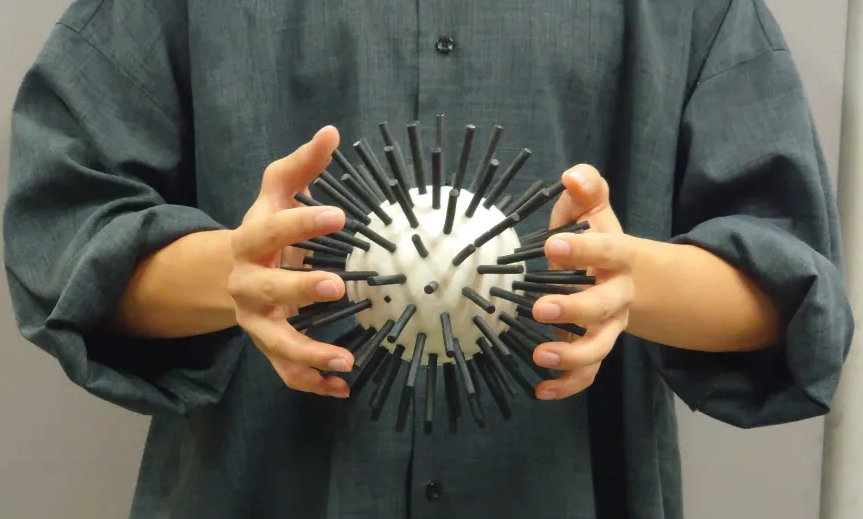
- Pin Ball:ハンドヘルド型球体ピンアレイインターフェース
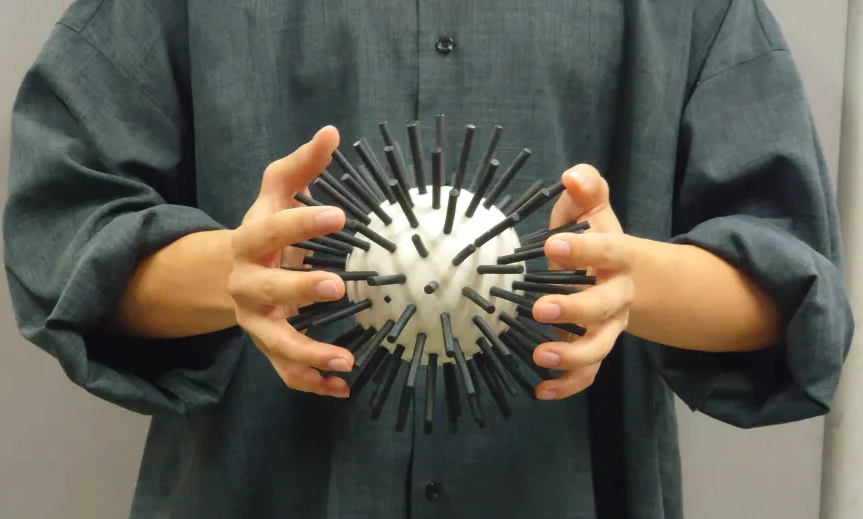
〇杉本 隆平(電気通信大学)、梶本 裕之(電気通信大学) - 球面上に配置された直動アクチュエーターによって構成されるピンアレイによって、立体的な触覚提示を可能にするPin Ballを提案する。提案するデバイスは80本のピンアレイによって構成され、小型に設計された球型A-TUIである。全周囲に配置されたピンアレイが伸縮し、ユーザーの両手に立体的な形状や触覚を提示することができる。本稿では、球型A-TUIを構成する回路基板やアクチュエータに関する検討を示す。
- 3E1-02
- タンジブル手書き文字入力システムを用いたコピー&ペースト機能の考案と検討
〇佐藤 秀翔(秋田大学)、藤原 克哉(秋田大学)、中島 佐和子(秋田大学)、水戸部 一孝(秋田大学) - 本研究では,実際に指で触れている感覚を得ながら文字を描画できる「タンジブル手書き文字入力システム」を開発している.本システムは,磁気式モーションキャプチャで示指とアクリル板の位置および姿勢を取得し,両者の接触を検知した時に,インク射出イベントを発生させることで文字を描画している.本稿では,新たに実装したコピー&ペースト機能について複数のユーザインタフェースを考案,検討したので報告する.

- 3E1-03
- 取り下げ
- 3E1-04
- 仮想物体の変形による3DUI部品の把持操作の安定化
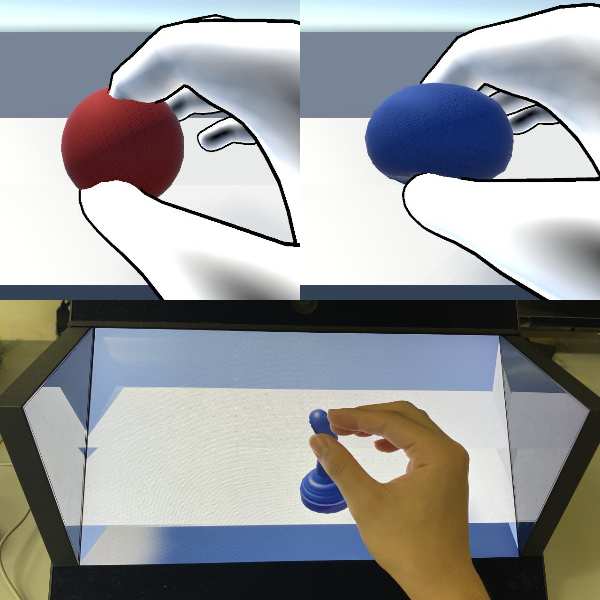
〇笠井 陽太(埼玉大学)、入山 太嗣(埼玉大学)、小室 孝(埼玉大学) - 本研究では,VR/AR環境において3DオブジェクトをUI部品として把持操作する際に,手指が物体にめり込むことによって生じる問題を解決するために,物体の変形を利用した視覚フィードバックを提案する.提案手法では手指の形に合わせて3Dオブジェクトを変形させて手指に追従させることで安定した把持を実現する.動作の様子を3Dディスプレイ上で表示し,オブジェクトをユーザーの手指で把持操作できることを確認した.
- 3E1-05
- ソーシャルVRプラットフォームにおいてデバイスの入力変調を実現するドライバソフトウェアの提案
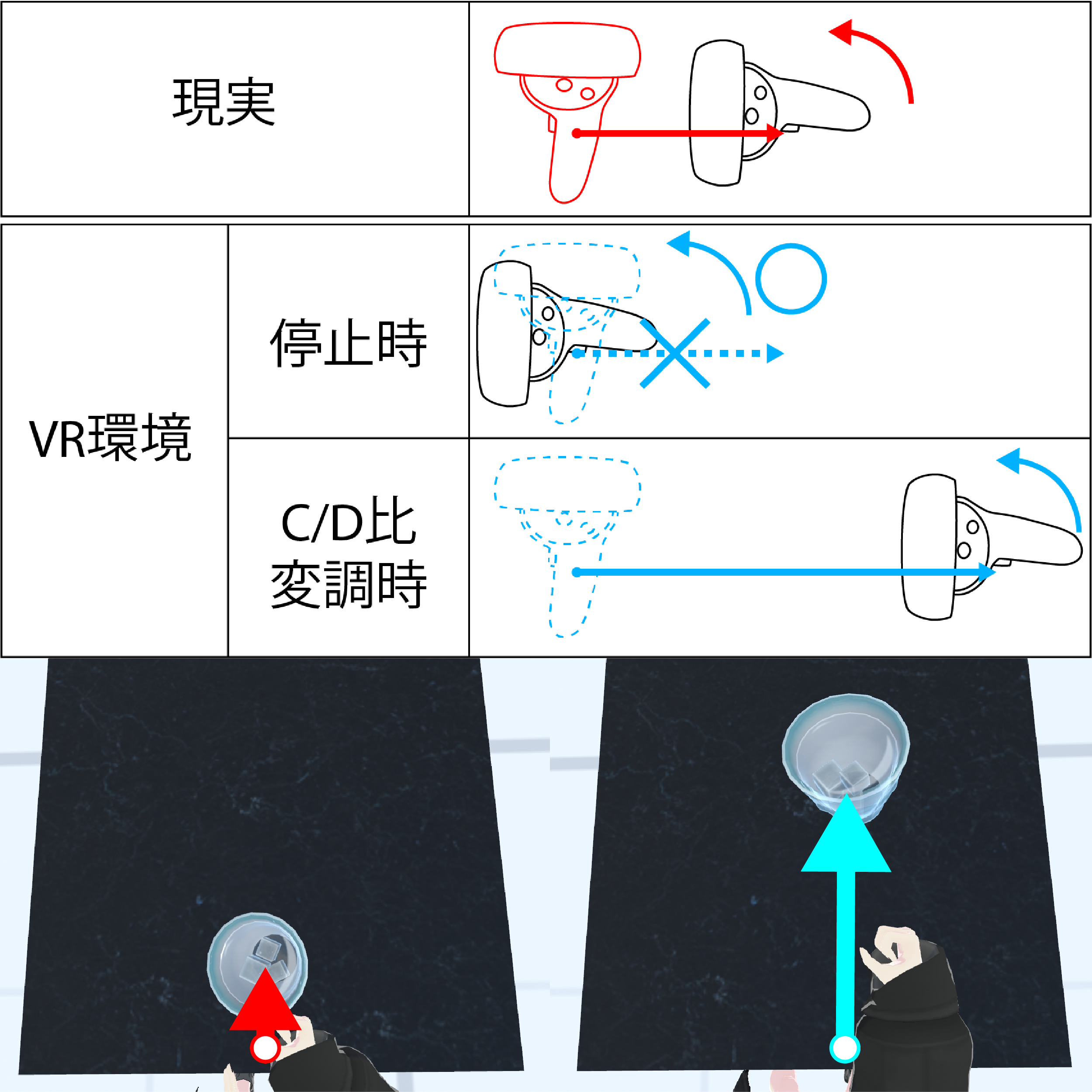
〇西本 和貴(東京大学、クラスター メタバース研究所)、倉井 龍太郎(クラスター株式会社)、鳴海 拓志(東京大学)、平木 剛史(クラスター メタバース研究所) - VR体験でユーザの操作量をそのまま反映しないケースが増えている。ソーシャルVRプラットフォームで操作量を編集するには、クライアントソフトを変更せずに操作量を取得し変調する必要がある。本稿では、OpenVR対応機器向けに、SteamVR上のデバイスポーズを変調するドライバソフトと外部アクセス用インタフェースライブラリを開発した。SteamVR Homeやcluster上でデバイス座標の固定や操作量のC/D比変調をリアルタイムに実行できることを確認した。
- 3E1-06
- HMDセンシング情報を用いた操作意図推定によるアバタの動作構成
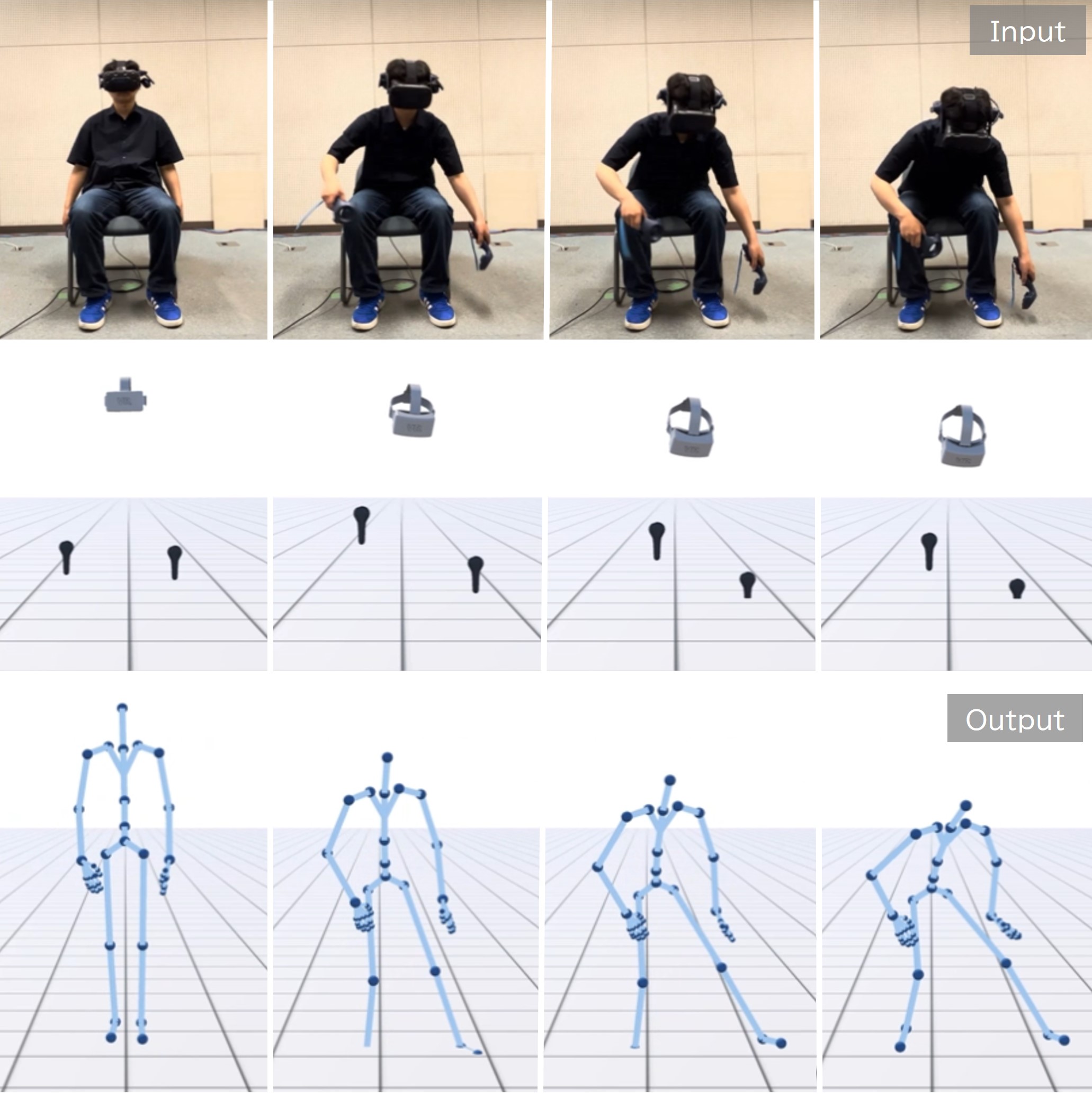
〇西田 有吾(宇都宮大学)、森 博志(宇都宮大学) - 本稿では,VR-HMD付属のセンサから取得可能な頭と手のトラッキング情報を用いてユーザの意図したアバタの全身動作を構成する手法を提案する. 実験では座位姿勢におけるユーザの直感的な姿勢入力を用いて構成した全身動作を対象に,目標姿勢との姿勢差の比較およびユーザ評価により意図した全身動作の構成が可能であることを確認した.
- 3E1-07
- 取り下げ
- 3E1-08
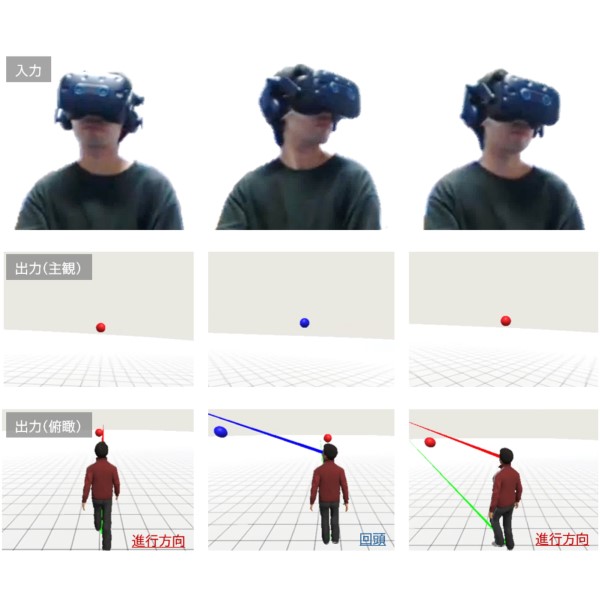
- 頭部姿勢入力を用いた回頭行動を伴うアバタのウォークスルー操作
〇野々宮 悠人(宇都宮大学)、森 博志(宇都宮大学) - VR空間における自由な空間移動や視点移動を実現するウォークスルー操作においては、移動方向に視線を向ける行動に加えて,視覚を通して空間情報を収集するために周囲を見渡すように進行方向と異なる方向に視線を向ける回頭行動の実現が求められる。そこで本稿では、座位姿勢における操作者の頭部姿勢入力を用いた回頭行動を伴うアバタのウォークスルー操作手法を提案する。
- 3E1-09
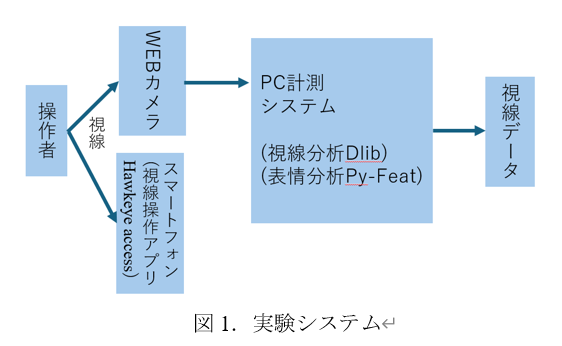
- 視線操作の使いやすさ向上に関する研究 - 第1報 動作割り当ての影響 -
〇原田 帆七海(東京工科大学)、高橋 秀智(東京工科大学) - モバイル環境の充実により様々なUIが登場している.その中で,視線操作は動きにくい環境に適した手法であるといえる.しかし慣れが必要であることなどにより,扱いにくいと感じる人が多く存在している.そこで,個人に合わせた調整を行い,扱いにくさの改善を狙う.本報では,まず動作割り当て,例えば選択操作時の認識のための瞬き時間などの実験を行い,ユーザーに使いやすい設定を明らかにする.
- 3E1-10
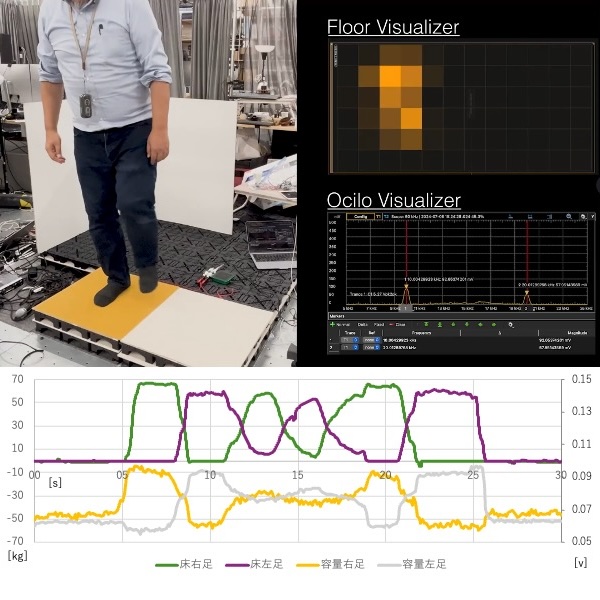
- 床天井間の静電容量計測による部屋スケール人体姿勢検出の基礎検証
〇新居 英明(慶應義塾大学大学院メディアデザイン研究科)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、小林 康平(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 部屋スケールでの人体姿勢の研究において、既にモジュール床による足裏の重心計測などを用いた姿勢検出がおこなわれてきている。しかし荷重のない状態や足裏が触っている状態などの検出は難しかった。今回、モジュール床と天井の間にアクティブな容量変化を計測することで、モジュール単位での位置計測や、足裏がモジュール床に接触する前の状態を計測できることがわかった。この件に関する基礎的な検証をおこなったので報告する。
- 3E1-11
- 直感的操作を可能とする建設機械遠隔操縦システムの研究 第二報 基本環境との比較
〇伊勢 珠皇(東京工科大学)、高橋 秀智(東京工科大学)
口頭発表10:10-10:50 、ポスター発表11:45-12:30
教育・訓練2
- 3A2-01
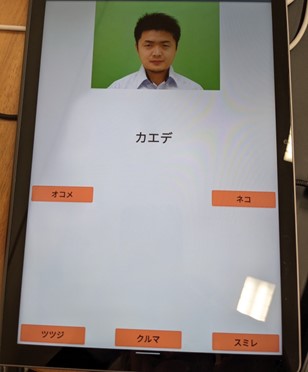
- 対話型エージェントの支援が短期記憶作業に与える影響
〇中村 賢治(群馬大学)、大山 善昭(群馬大学) - ロボットや対話型のエージェントは社会の中に導入され、その効果検証は進んでいる。その中で、対話エージェントの音声や支援が人間の記憶に残るかを検証している事例は少ない。そこで我々は、短期記憶テストにおける対話エージェントの効果を検証した。さらに座位、歩行時、車内環境における違いも計測し、その結果を報告する。短期記憶にはn-backテストを用い、Hot-2000(NIRS)を用いて計測をした。
- 3A2-02
- ケア教育における360°PXコンテンツ体験時の感情の主観・客観的評価
〇山中 望(静岡大学)、小俣 敦士(静岡大学、浜松医科大学)、村上 佑順(オレンジクロス財団)、香山 壮太(郡山市医療介護病院)、菅家 穣(郡山市医療介護病院)、石川 翔吾(静岡大学) - 本研究では今後人材不足が考えられる看護介護職の教育のため,ケアの場面を没入型映像で再現したPXコンテンツを作成した.コンテンツ視聴時に生体データを取ることやアンケートを取ることでケア映像による教育の効果について客観的・主観的な視点から分析を行い,生体データの有用性,PXコンテンツの教育効果について示す.
- 3A2-03
- 視覚と触覚の異種感覚併用提示による動作教示手法の提案
〇湯川 光(名古屋工業大学)、菅田 成人(名古屋工業大学)、池尻 周杜(名古屋工業大学)、平田 仁(名古屋大学)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科)、田中 由浩(名古屋工業大学、稲盛科学研究機構)
- 3A2-04
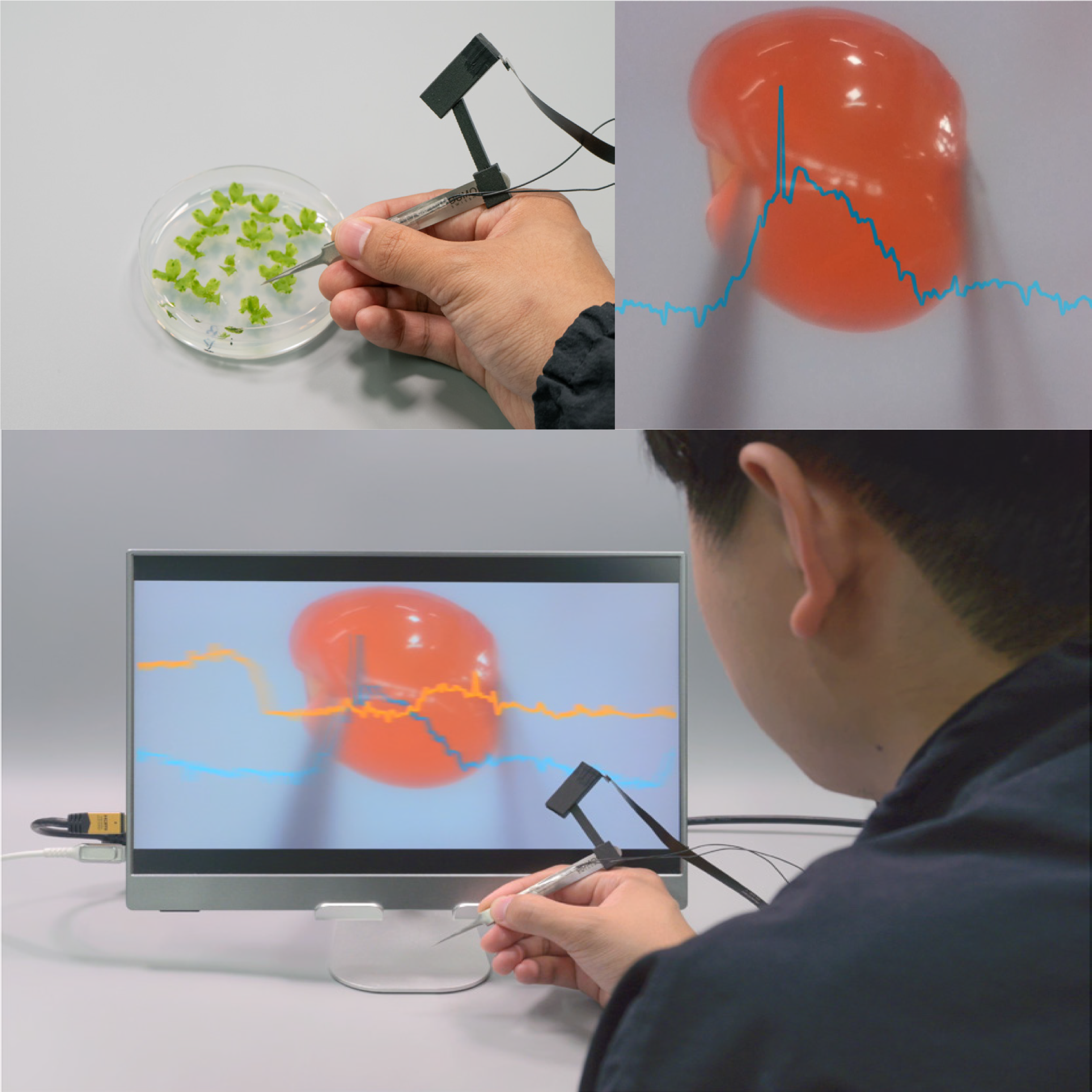
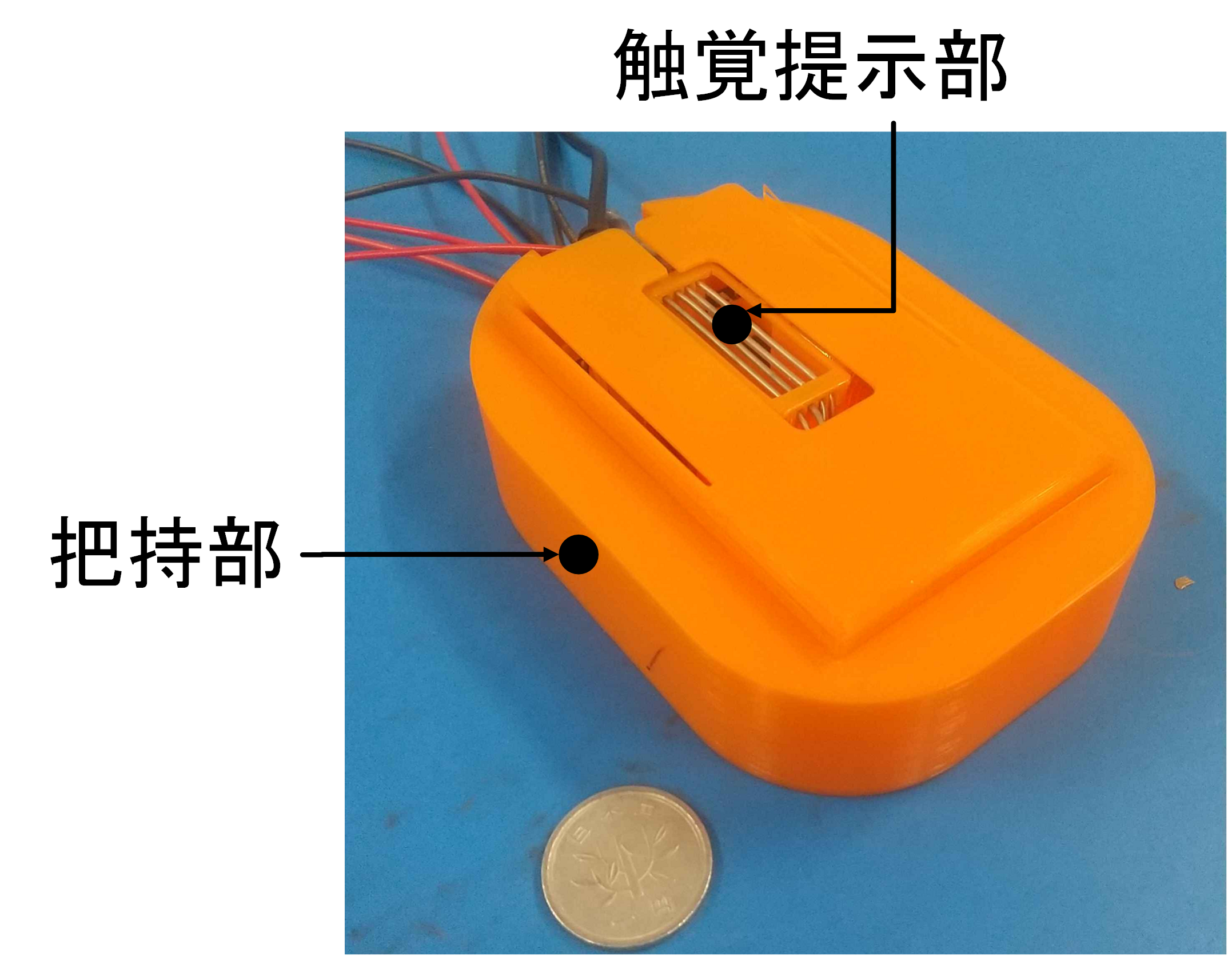
- SkillPicker: 挟力情報を共有する技術伝達のためのピンセット型デバイス
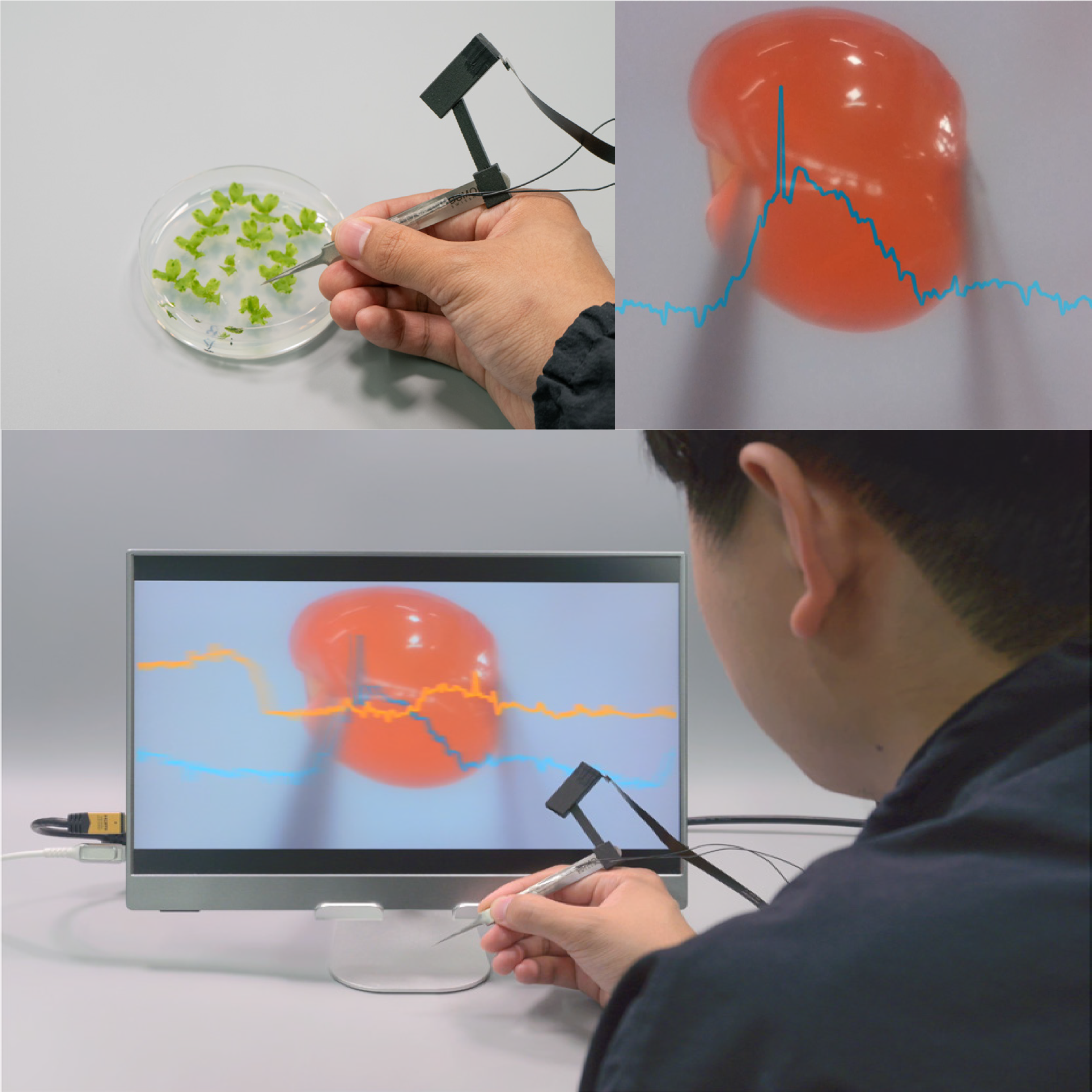
〇松平 親慶(東京大学)、大伏 仙泰(東京大学)、大城 翔平(奈良先端科学技術大学院大学)、今井 雄星(東京理科大学)、貴嶋 紗久(産業技術総合研究所)、金澤 建彦(基礎生物学研究所)、塚谷 裕一(東京大学)、中島 敬二(奈良先端科学技術大学院大学)、稲見 昌彦(東京大学) - 生物学実験においてピンセットは不可欠なツールであり、中でもピンセットの挟力操作は実験結果を左右する技能として知られる。熟練者による挟力の教示が困難であるという課題に対し、我々はピンセット先端部の拡大像提示と挟力計測機能を組み合わせたピンセット型の技能伝達用デバイスSkillPickerを提案する。挟力の可視化や音階への変換を通じ、初心者は熟練者の挟力操作を体感的に習得可能となることが期待される。
- 3A2-05
- VR能体験システムにおけるガイド機能の検討と評価
〇佐々木 奏太(大阪電気通信大学)、大西 克彦(大阪電気通信大学) - 本研究では,VR能体験システムにおいて,体験に際しての動作の指示をより詳細に行うガイド機能の改良と,舞台裏の再現等より臨場感の高い環境を再現した.また,実験とアンケート調査により有用性について検討した.これによって、時間や場所を選ばず気軽に能文化に触れることができるようになるだけではなく, 能文化に対しての興味をさらに誘発することが期待される.

- 3A2-06
- 動作教示手法における異種感覚刺激提示の有効性の検証
〇菅田 成人(名古屋工業大学)、湯川 光(名古屋工業大学)、池尻 周杜(名古屋工業大学)、平田 仁(名古屋大学)、田中 由浩(名古屋工業大学、稲盛科学研究機構)
- 3A2-07
- メタバース型災害看護教材のための被災者アバターの動作制御
〇竹内 聡一(大阪工業大学 大学院情報科学研究科)、西口 敏司(大阪工業大学 情報科学部)、水谷 泰治(大阪工業大学 情報科学部)、橋本 渉(大阪工業大学 情報科学部)、亀井 縁(四天王寺大学 看護学部)、松下 由美子(甲南女子大学 看護リハビリテーション学部) - 仮設住宅で暮らす被災者を戸別訪問して生活状況を把握し支援する保健師のための教材として,メタバース空間上に被災者アバターと保健師アバターが登場する仮設住宅を構築し,戸別訪問の経験がある保健師が被災者アバターの動作を再現することを検討している.本研究では,利用の難易度が異なる複数のモーションキャプチャシステムと,それらに基づいて再現した被災者アバターの動作の自然さについて比較・検証を行う.

- 3A2-08
- VRシミュレータを用いた赤信号下の交差点進入時における緊急走行の運転行動の比較
須藤 拓磨(兵庫県立大学)、井上 草太(兵庫県立大学)、山口 晋吾(姫路市消防局)、永田 昌平(姫路市消防局)、〇山添 大丈(兵庫県立大学)
- 3A2-09
- ミクロな視点とマクロな視点を切り替え可能なxR教育システムの基礎的検討
〇平塚 心太朗(北見工業大学)、田中 宇宙(北見工業大学)、山崎 楽斗(北見工業大学)、酒井 大輔(北見工業大学) - 我々は、複合現実感(MR)と人工現実感(VR)技術を組み合わせたxR教育システムを開発した。教育システムは、MR空間でオブジェクトを操作するシーンと、操作したオブジェクトをVR空間で体験できる2つのシーンからなる。ヘッドマウントディスプレイを装着した生徒は、対象となる教材を、MR空間上ではマクロな視点で操作し、VR空間上ではミクロな視点で体験できることが可能となった。

- 3A2-10
- 遊牧民の伝統を体験するポータルシステムの基礎検討
〇KANIMETOVA AZIZA(慶應義塾大学大学院メディアデザイン研究科)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、Armstrong Mark(慶應義塾大学大学院メディアデザイン研究科)、脇坂 崇平(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 本研究では、キルギスの遊牧文化を身近に感じてもらうことを目指し、画像生成 AI によってリアルタイムに体験者の映像を異なる文化スタイルへと変換する Mirrored Culture という体験を提案する。体験者は伝統的な移動式住居に入り、民族衣装を纏った自分自身の映像を視聴する。複数の文化的側面を体験できるプロトタイプを実装と体験者からのフィードバックを通じて、今後の開発の方向性を検討した。

- 3A2-11
- 「学びの場」メタバースの開発とオープンソース公開
〇伊藤 研一郎(東京大学)、Hu Yong Hao(東京大学)、五十嵐 歩(東京大学)
- 3A2-12
- 試験監督バーチャル訓練における動作の提示に関する研究
〇坂口 正道(名古屋工業大学)、杉山 丈斗(名古屋工業大学)
口頭発表10:10-10:50 、ポスター発表11:45-12:30
嗅覚・味覚・聴覚
- 3B2-01
- 咀嚼・嚥下中の視聴覚ノイズの遮断による風味と食感の向上
〇日塔 諒太(東京大学)、小宮 晨一(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - 食品が持つ繊細な風味や食感を高めるため,口腔内の感覚に集中し視聴覚ノイズを遮断することがある.本研究では,食品を口内に入れた瞬間に視聴覚ノイズを遮断し,嚥下が終了した瞬間に視聴覚ノイズを復元させることで,集中的注意が促進され風味や食感が向上すると考え,検証を行った. 予備検証の結果,提案手法の有用性が示唆された.

- 3B2-02
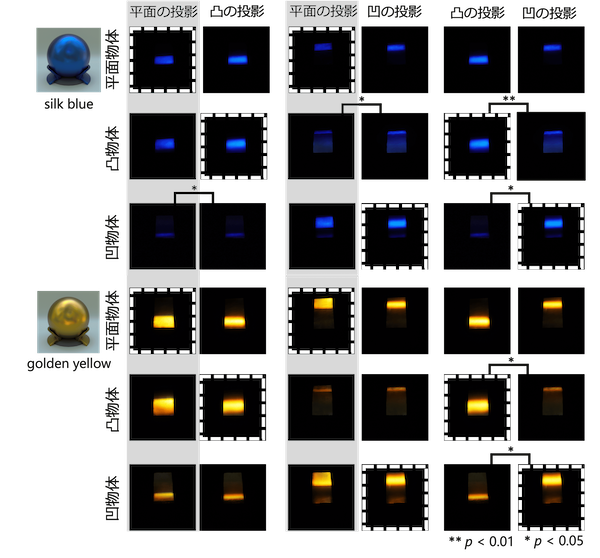
- タバスコ同等の辛味増強感を実現する舌部電気刺激手法の評価
〇大野 雅貴(東京大学)、青山 一真(東京大学バーチャルリアリティ教育研究センター)、鳴海 拓志(東京大学) - 舌部電気刺激手法はユーザの辛味知覚を増強可能であり,過剰な辛味物質摂取を避けながら食事に辛さを添加できるインタフェースの基盤技術として期待されている.本研究では,電気刺激による辛味増強効果が実際にどの程度の辛味物質の添加に相当するのか検証した.参加者に対して異なる濃度のタバスコ溶液と舌部電気刺激を呈示した際の辛味・塩味・酸味の各モダリティの知覚強度を評価する実験を行った.その結果,タバスコ溶液に対して1.0 mAまたは2.0 mAの陽極舌部電気刺激を呈示した場合,電気刺激なし条件と比較して参加者の辛味と酸味の知覚強度に有意差は見られず,塩味に対してのみ増強効果が示唆された.

- 3B2-03
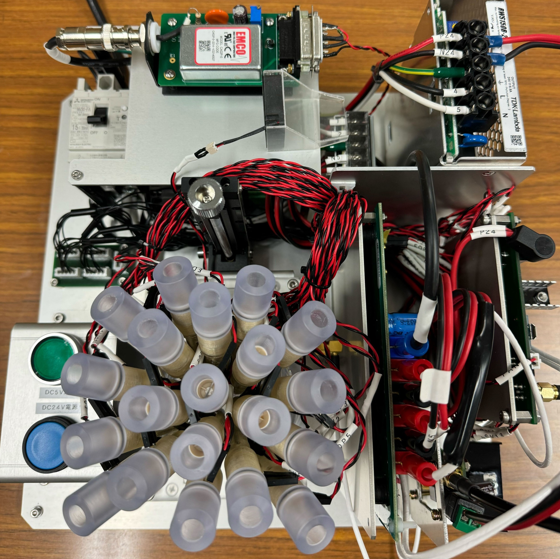
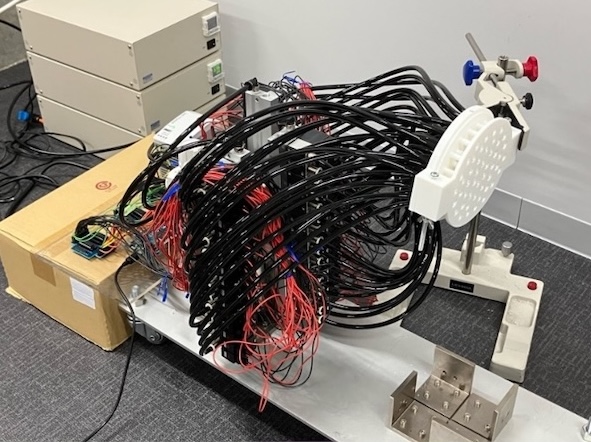
- 20成分調合型嗅覚ディスプレイの改善
〇田辺 寛起(東京工業大学)、恩田 陽介(太陽誘電株式会社)、プラセティアワン ダニー(東京工業大学)、中本 高道(東京工業大学) - 嗅覚ディスプレイとは人に匂いを提示する装置である.本研究は,従来は本体以外にファンクションジェネレータとRFアンプの2つの外部装置が必要であったが,RFアンプ回路の設計とFPGAの設計変更を行うことで,小型化することに成功した.RFアンプは駆動時に熱を持つため,ヒートシンクを付けることで放熱する.駆動時のヒートシンクの温度を測定し,最適なヒートシンクのサイズを選定した.
- 3B2-04
- 筋電信号を用いた振動刺激の提示による食体験の影響の調査
〇伊福 稔貴(熊本大学大学院)、嵯峨 智(熊本大学大学院)
- 3B2-05
- 高齢者向け嗅覚VRゲームのための匂い選定
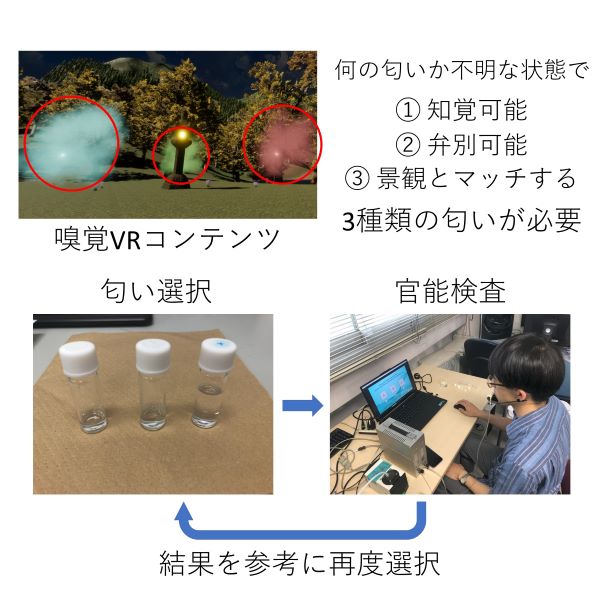
〇角南 遼太(東京工業大学 工学院)、中本 高道(東京工業大学 科学技術創成研究院)、コーヘン ネイサン(ロンドン芸術大学) - 匂いは、名義を示す言語情報と非言語の感覚情報でその種類が知覚される。嗅覚VRで提示される匂いの言語情報は他モダリティから得られる情報であり、嗅覚が単一のモダリティとして機能するためには非言語の感覚情報のみで匂いの種類が弁別されることが必要である。本論文では、高齢者向け嗅覚VRゲームで利用するための、感覚情報のみで互いに弁別可能な匂いの選定手法を示す。その後、実際に3種類の匂いの選定を行う。
- 3B2-06
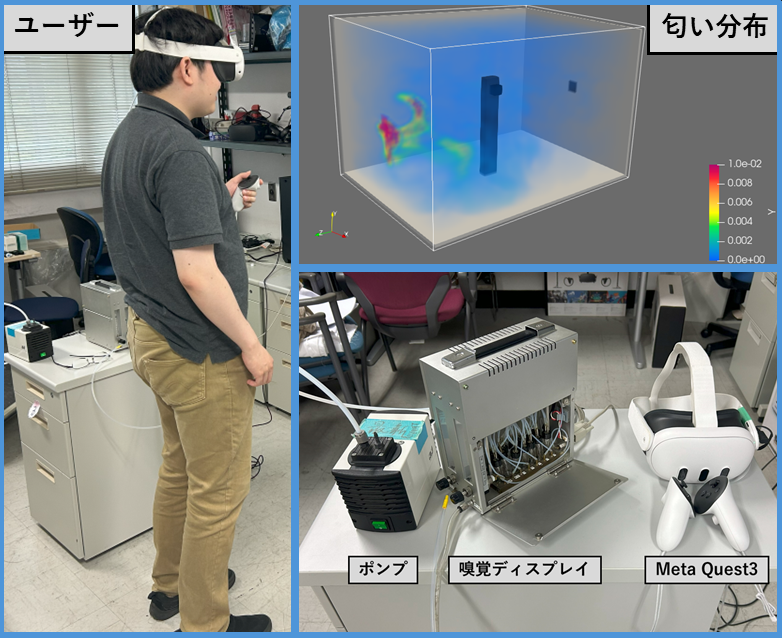
- 嗅覚VRにおける実時間数値流体計算の有用性
〇宇田 匡郁史(東京工業大学)、中本 高道(東京工業大学) - 近年、仮想空間における嗅覚の重要性は高まっている。現実に近い嗅覚体験を実現することで、火災などの匂い情報の価値が高い状況における訓練などの応用が期待される。我々は実時間流体計算を用いて、嗅覚体験の質の向上を研究してきた。本研究では、仮想空間の匂い探知における実時間数値流体計算の有用性を検討した。実験の結果、仮想空間内の匂い源探知の際、実時間数値流体計算により匂い方向感が増すことが分かった。
- 3B2-07
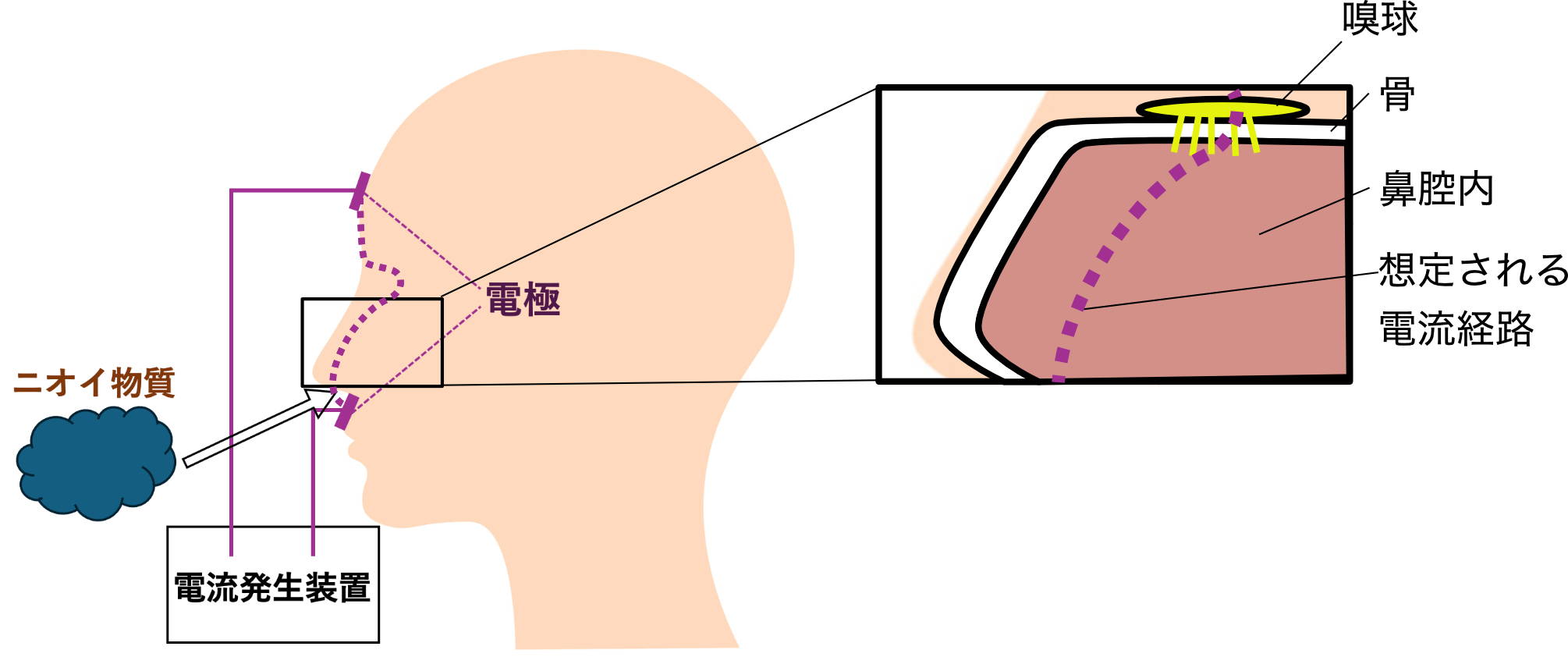
- 経皮的電気刺激を用いたニオイ強度変調手法の提案
〇前田 叡一(大阪大学大学院情報科学研究科)、原 彰良(大阪大学大学院情報科学研究科)、宮本 拓(大阪大学大学院情報科学研究科)、古川 正紘(大阪大学)、前田 太郎(大阪大学) - 我々は鼻付近への経皮的な電気刺激によって,ヒトがにおい物質を吸引した際に感じるニオイ強度の印象を変調させられることを発見し,酢酸やアンモニアなどの電解性を持つ物質において当該現象を確認したが,エタノールなどの非電解質では確認できなかった.この結果から,カソード味覚電気刺激と同相の現象であると考えられる.本報告ではこの現象を用いて,ニオイの知覚における即時的な変調を可能にする電気刺激手法を開発した.この手法は,従来の嗅覚ディスプレイの弱点であるニオイの即時的な除去が困難であるという課題の解決をもたらすものと期待される.
- 3B2-08
- 香り体験を言葉に接地させた単語学習法の検討
〇本田 祐大(九州大学)、谷澤 健太(九州大学)、正井 克俊(九州大学)、中村 優吾(九州大学)、崔 赫秦(九州大学)、福嶋 政期(九州大学) - 語彙学習において、単語(記号)をその単語に関連する経験に紐付ける(接地する)記号接地という手法が注目を集めている。香りは感情と共に多様な感覚を想起させるため、強力な記号接地の効果が期待できる。そこで本研究は香りを学習のターゲット語彙に接地させることを目指す。具体的には画像生成AIを用いて、単語の頭文字を埋め込んだ香りのイメージを作成し、画像と香りの空間を経由して単語にイメージを接地させる手法を提案する。

- 3B2-09
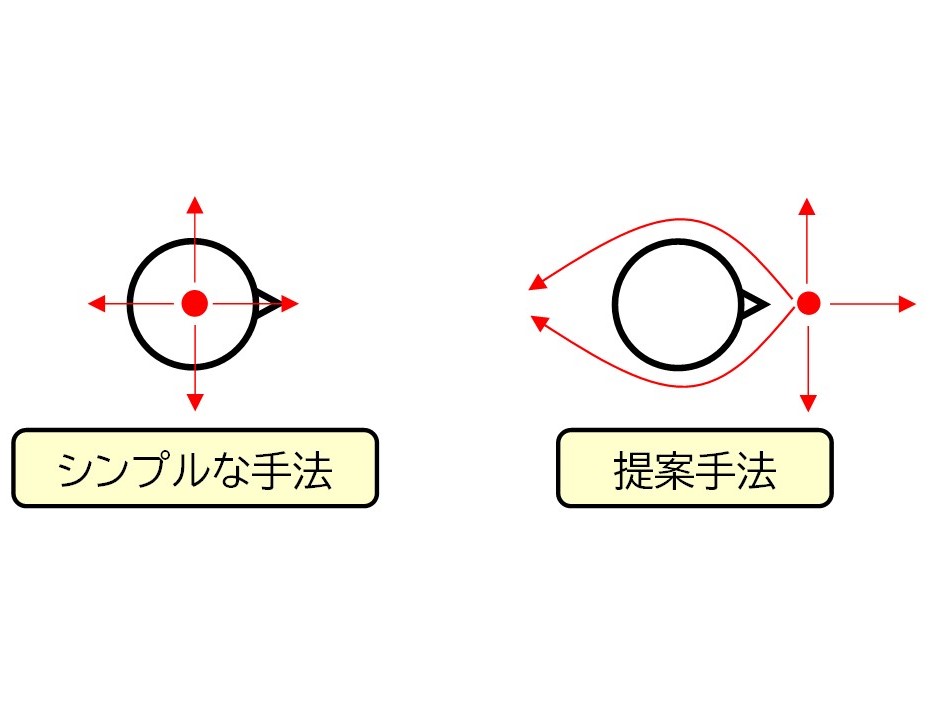
- クラスタ型デジタル空気砲における柔軟素材による偏向ノズルの構築と安定化
〇森田 尚樹(名城大学)、安藤 潤人(立命館大学)、野間 春生(立命館大学)、柳田 康幸(名城大学) - 香りの時空間的な局所提示を行う手段として,クラスタ型デジタル空気砲 (CDA) の研究開発を行っている.従来,渦輪の射出方向を制御するにはCDAの射出ヘッド全体を回転させる必要があったが,ノズルを柔軟な素材で製作し変形可能な偏向ノズルにより,CDA全体を回転させることなく小さな機械的変形で方向制御が可能になった.製作した偏向ノズルの改善を行い,制御範囲の向上と安定化を検討した.
- 3B2-10
- VRコンテンツにおける人声の放射点を考慮したレンダリング法の効果
〇杉本 岳大(日本放送協会)、木下 光太郎(日本放送協会)、中山 靖茂(日本放送協会) - 人声のレンダリングにおいて、声道の開口端補正および頭部回折を考慮する効果を検証する目的で、VRコンテンツによる主観評価実験をおこなったところ、静止したアバター・歩行するアバター共に、従来法よりも再生音のもっともらしさが向上することを明らかにした。
- 3B2-11
- ヘッドフォン聴取時のAmbisonics録音方式を用いた複数音源の最適再生方法の検討
〇岡田 拓真(愛知工科大学)、山高 正烈(愛知工科大学) - 我々は先行研究において,Ambisonics録音方式によって収録した単一音刺激を再生する際の最適な再生方法の検討を行った.しかし,現実世界は複数の音からなる音空間であり,複数音源の最適再生方法について明らかにする必要がある.<#%BR%#>そこで本研究では,ヘッドフォン聴取環境を想定し,複数音源を再生する際の最適な音空間再生方法について,高次感性評価と音像定位の二つを軸に評価・検討を行った.
- 3B2-12
- オフィス空間内の複数の作業空間の音響的な重ね合わせ方の検討
〇沈 家宜(慶應義塾大学大学院メディアデザイン研究科)、辻田 喜琉(慶應義塾大学大学院メディアデザイン研究科)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - オフィス空間においては、メンバー同士の会話が重要である。しかし、物理的に離れた人に話しかけることは心理的コストが高く、会話が減ってしまう問題がある。そこで、本研究では物理的に離れた空間を情報的に重ね合わせるアプローチにより、二つの作業空間を音響的に接続するシステムを開発する。開発したシステムを用いて、コミュニケーションコストを下げることを目指す。
口頭発表10:10-10:50 、ポスター発表11:45-12:30
力覚・体性感覚
- 3C2-01
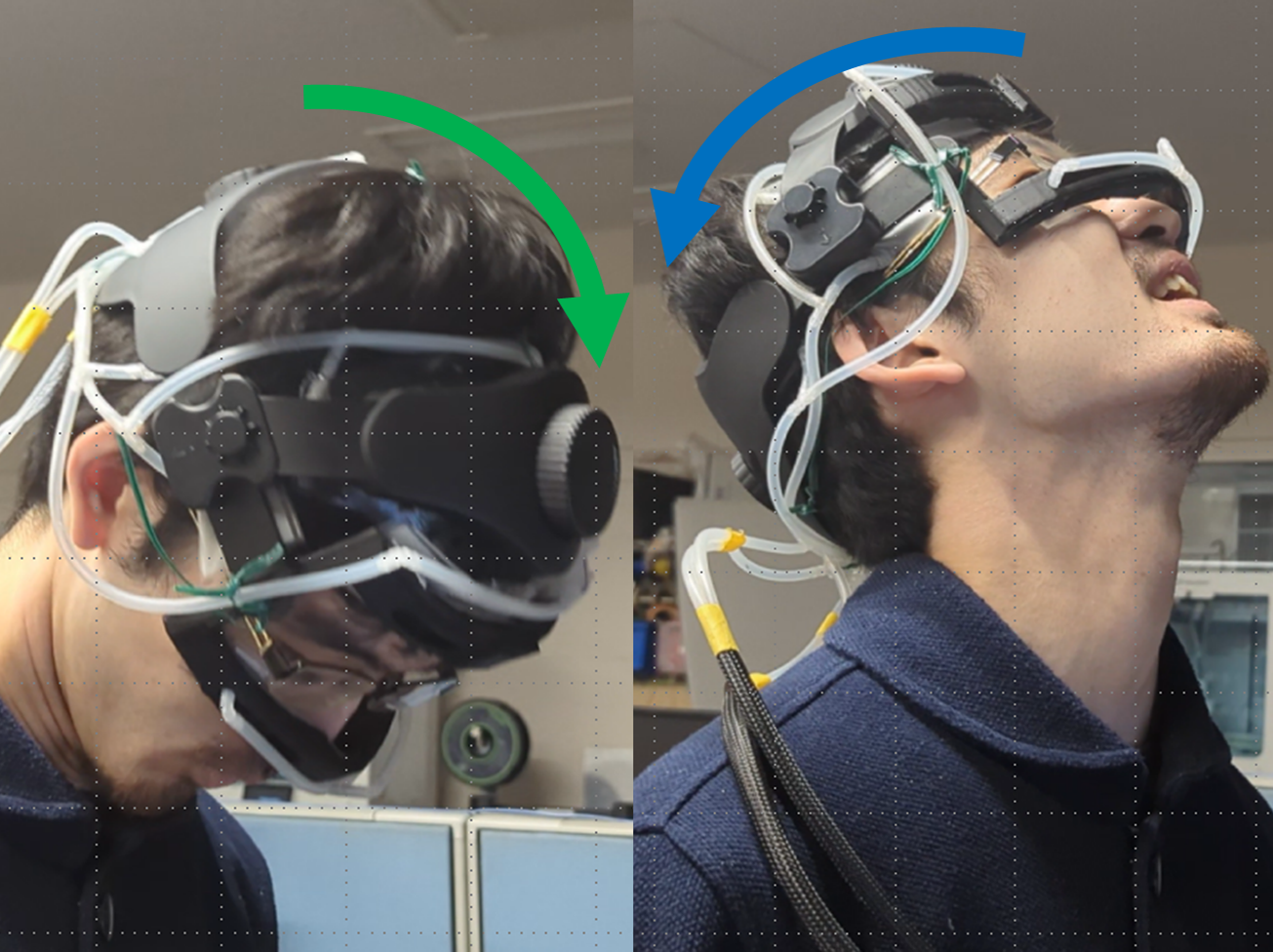
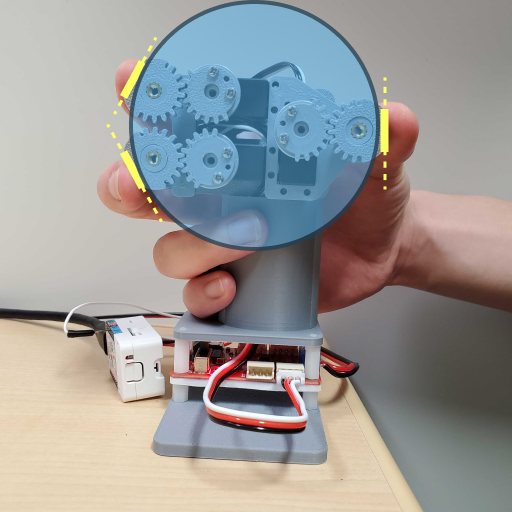
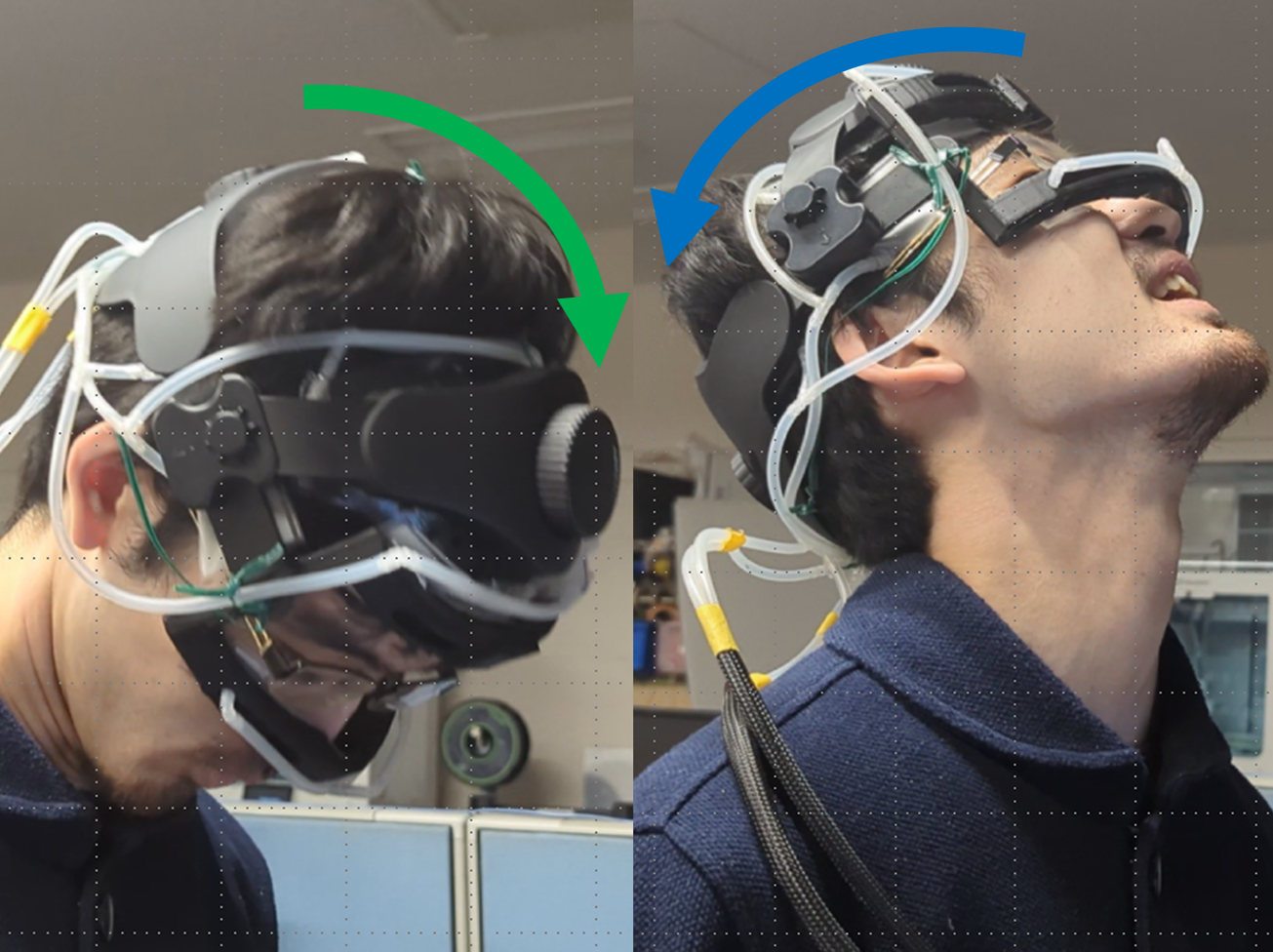
- 前後屈方向のハンガー反射提示装置の開発と評価
〇中村 拓人(東京大学)、葛岡 英明(東京大学) - これまでの頭部におけるハンガー反射制御装置は,ヨー軸である左右方向のハンガー反射を制御する装置であった.一方で,パッシブな装置によるピッチ軸やロール軸の力覚知覚は確認されていたが,それらを制御する装置開発には至っていなかった.そこで本研究では,新たな皮膚変形提示部位を発見することで,頭部のピッチ軸である前後屈方向のハンガー反射装置を開発した.
- 3C2-02
- 運動学習支援のための周期的かつ離散的な制動力を提示する下肢装着型デバイスの装着性向上
〇高田 崇天(筑波大学)、蜂須 拓(筑波大学)、ハサン モダル(筑波大学) - 我々はこれまでに身体運動に対する感覚刺激のフィードバックによる運動学習の支援を目的に,膝関節の屈伸角度に応じて周期的かつ離散的な制動力をフィードバックするデバイスの設計・開発に取り組んできた.本デバイスの装着性には課題があり,使用者の実際の膝関節とデバイスが計測した角度の間に無視できない誤差が生じていた.本発表では,柔軟な装着性の実現によるフィードバックの質の向上を目指し,装具に蛇腹機構を,リンクにスライド機構を採用したデバイスの設計について報告する.

- 3C2-03
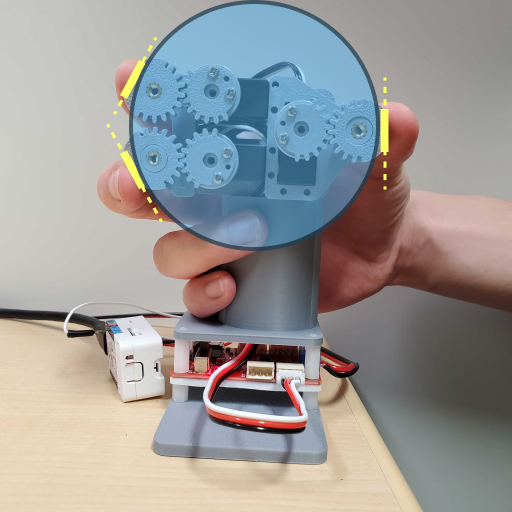
- フレネルシェイプ:各指先接平面の傾きを操作する形状提示装置
〇太田 裕紀(奈良先端科学技術大学院大学)、平尾 悠太朗(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - 日常生活において人々は多様な形状の物体を把持・操作する.同様に,バーチャルリアリティ環境においても,形状を提示することが臨場感向上に寄与する.既存のハンドヘルド型形状提示装置は,指先相対位置の固定やピンアレイを利用して形状を提示しているが,これらの方法では各指先接平面の傾きという重要な感覚を再現できていない.そこで本研究では,主として各指先接平面の傾きを提示する新しい形状提示装置を提案する.
- 3C2-04
- 高低温輻射源を用いた非接触温度ディスプレイの心理物理評価
〇久米 祐一郎(電気通信大学、平由商店研究部)、水野 統太(電気通信大学)、松倉 悠(電気通信大学) - 体表温度より高温および低温の輻射源からの遠線外線を制御することにより非接触の温度情報提示が可能である。また遠赤外線をシャッターで制御することにより、高速で輻射の変化が可能である。本研究では高温および低温輻射源にセラミックヒータと保冷材を各々用いた顔面に温冷感を生起させる非接触温度ディスプレイを試作し、遠赤外線をギロチンシャッターにより高速制御したときの温度感覚を心理物理的に測定し評価した。

- 3C2-05
- 疑似触覚を用いたフィードバックとして最適なバーチャルハンドの指関節変形角度の調査
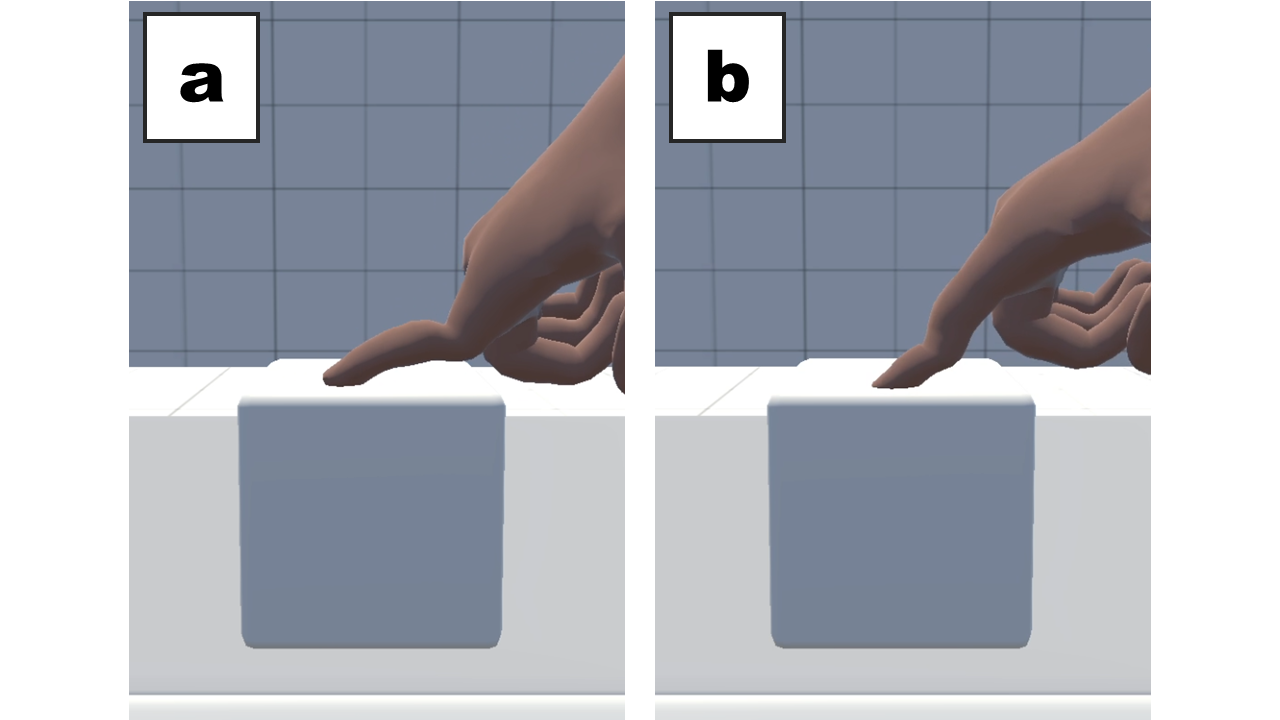
〇林 大智(明治大学)、森本 浩輔(明治大学)、渡邊 恵太(明治大学) - 前研究では,VR 空間内でのオブジェクト接触時に指の第一・第二関節を無制限に曲げるシステムを提案した.その実験においてユーザはオブジェクトを押し込んでいる際,オブジェクトとの接触感を錯覚し,また,この錯覚の起こりやすさは指関節変形の大きさと関係している可能性が示唆された.本実験では,その仮説の検証のため,上下法を用い最も疑似触覚を起こしやすい指関節の変形角度の大きさを導出した.
- 3C2-06
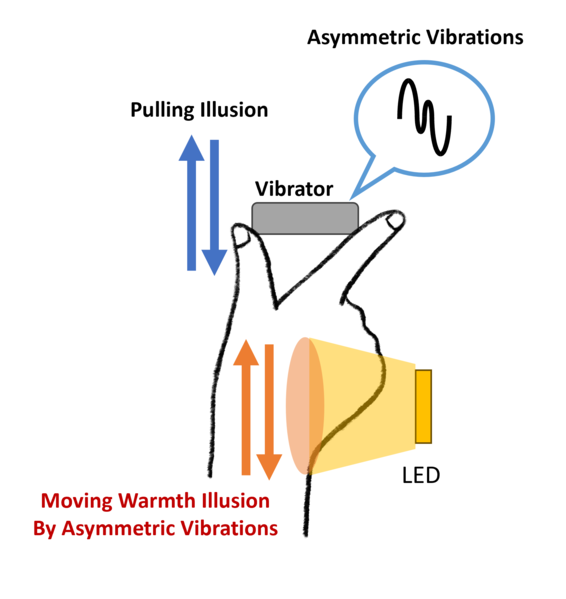
- 非対称振動による温感の運動錯覚提示
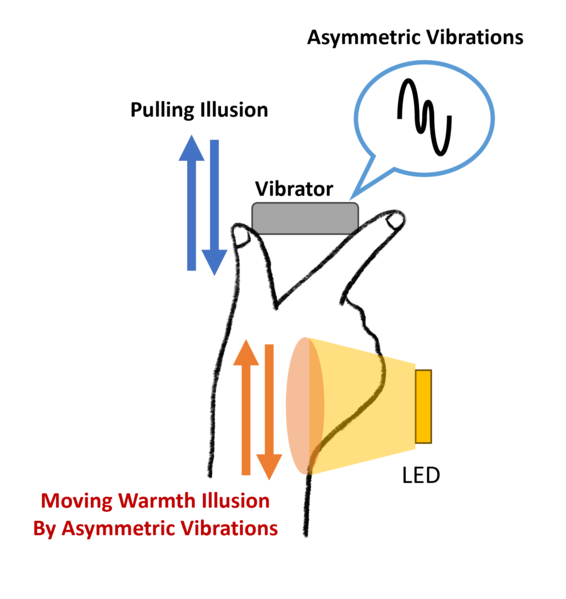
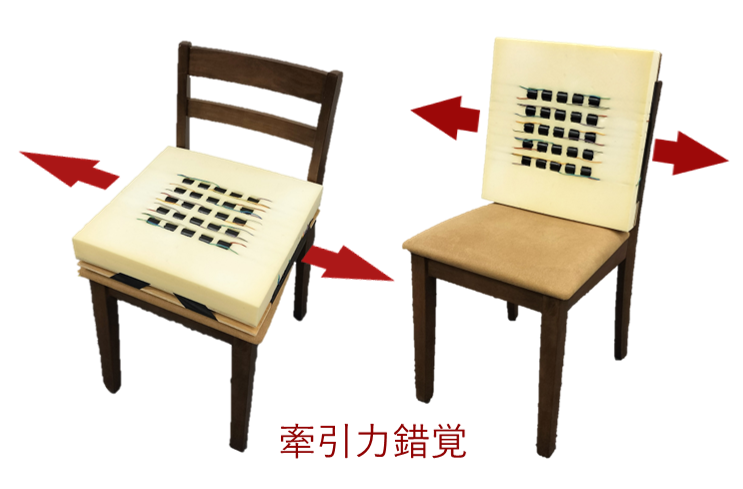
〇伊藤 天翔(筑波大学 理工情報生命学術院)、田辺 健(産業技術総合研究所 人間情報インタラクション研究部門)、長谷川 晶一(東京工業大学 未来産業技術研究所)、家永 直人(筑波大学 システム情報系)、黒田 嘉宏(筑波大学 システム情報系) - 本研究では非対称振動が温感の運動錯覚を引き起こすか調査しその特性を検討する。温感は非接触の可視光LEDで提示し、運動錯覚には牽引力錯覚に用いられる非対称振動を適用する。温覚提示と非対称振動あるいは正弦波振動を用いた比較実験で、温度感覚に運動錯覚が生じるかに加え熱源移動時の運動感との比較や、錯覚を組み合わせた際の影響を調査した。本研究により振動子による温感の運動感提示が可能になると期待される。
- 3C2-07
- 牽引力錯覚によって生じる手関節の弾道運動と行為主体感の不一致
〇田辺 健(国立研究開発法人産業技術総合研究所)、金子 秀和(国立研究開発法人産業技術総合研究所)
- 3C2-08
- 大腿後面への微弱振動印加による皮膚伸張知覚へ影響
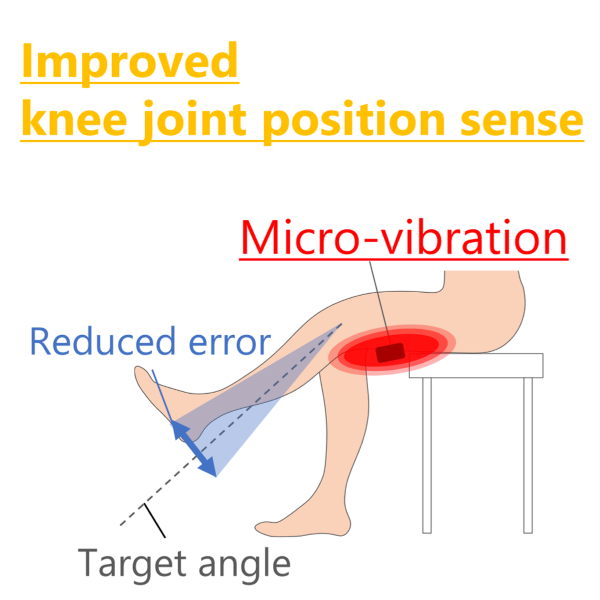
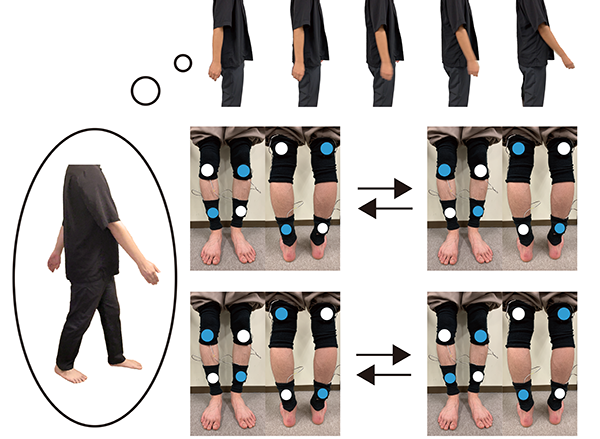
〇清水 太陽(筑波大学)、橋本 悠希(筑波大学) - 我々は、大腿部に微弱振動を印加することで皮膚伸張知覚感度を高め、膝関節位置覚の精度を向上させる手法の確立に取り組んでいる.大腿前面への微弱振動印加による位置覚向上効果は既に報告されていることから,大腿後面に関しても同様の効果が生じる可能性がある.そこで本稿では,大腿後面への微弱振動印加によって位置覚に与える影響を検証し,その結果を報告する。
- 3C2-09
- 協調的な腕振り動作が運動錯覚による歩行感覚に与える主体感への影響
〇成田 叡賦(電気通信大学)、牛山 奎悟(電気通信大学)、溝口 泉(電気通信大学)、梶本 裕之(電気通信大学) - 運動錯覚は,実際の身体の動きを伴わずに運動感覚のみを提示することが可能であるが,運動に対する主体感が不脚している.そこで我々は,運動錯覚を用いた歩行感覚に着目し,協調的な腕振り動作を実動作として組み合わせることで運動錯覚に主体感を付与できるのではないかと考えた.本研究では,腕振り動作によって上腿と足首の前後への振動を切り替えるシステムを実装し,腕振り動作の有無で運動錯覚による歩行感覚に対する主体感に変化があるか調査した.
- 3C2-10
- 手掌部皮膚変形提示装置が生じさせる力知覚の評価
〇西本 和貴(東京大学)、中村 拓人(東京大学)、橋本 健(東京大学)、鳴海 拓志(東京大学) - 指先を対象として皮膚を剪断方向に変形させることによる重量感提示手法が研究され、力知覚と物理量の対応が明らかにされている。他方、手掌部は指先より皮膚変形を大きく生じさせることが可能なため、より強い力知覚を提示できる可能性がある。本研究では、手のひらの特定の2点に皮膚剪断変形を引き起こせる把持型触力覚提示デバイスおよび手掌部皮膚の変形量と生じる力知覚の関係を調査するための実験系を開発している。本稿ではこれまでに実装した実験系について紹介を行う。

- 3C2-11
- 座面への分布的な非対称振動波形が牽引力錯覚に及ぼす効果
〇福田 光輝(東京大学)、青山 一真(東京大学)、雨宮 智浩(東京大学)、中村 拓人(東京大学)、鳴海 拓志(東京大学) - 手や指に非対称振動刺激を提示すると牽引力錯覚が生じることが報告されているが,他の部位で惹起するかは確認されていない.本研究では,座面に牽引力錯覚を生じさせることで着座移動時の慣性力等を模擬して移動感を提示することを狙い,振動子を複数組み込み非対称振動刺激を分布的に提示できる装置を製作した.異なる波形および周波数の条件下で実験を行った結果,腰部および臀部でも牽引力錯覚が惹起することが示された.
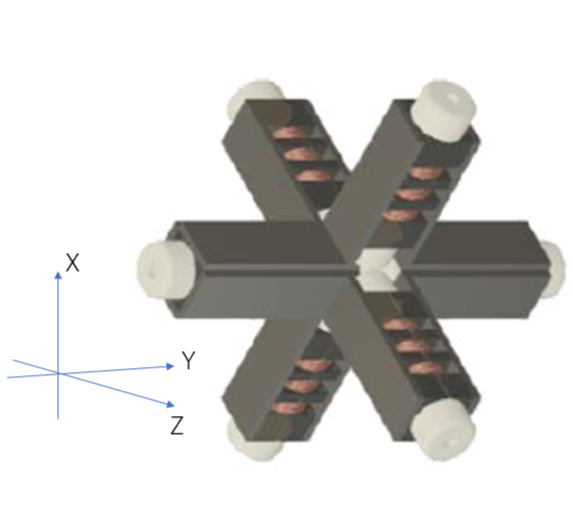
- 3C2-12
- 非対称振動による3次元仮想力覚デバイスの方向提示能力の検証
〇廣田 優奈(富山県立大学)、坂東 裕太(富山県立大学)、長原 末緒(富山県立大学)、西澤 昌宏(富山県立大学)、中田 崇行(富山県立大学) - 仮想力覚とは,非対称振動によって与えられる疑似的な牽引力であり,ゲームコントローラ等への応用が期待される.本研究ではX,Y,Z軸にそれぞれ対応する振動子を配置した仮想力覚提示デバイスを用いる.3軸の疑似的な牽引力のベクトル合成によって表現可能な26方向の力覚を生成し,その識別精度を調べた.26方向は立方体の中心から各面および各辺の中心と各頂点に向かう方向である.今回はその実験結果と考察を報告する.
口頭発表10:10-10:50 、ポスター発表11:45-12:30
身体性認知2
- 3D2-01
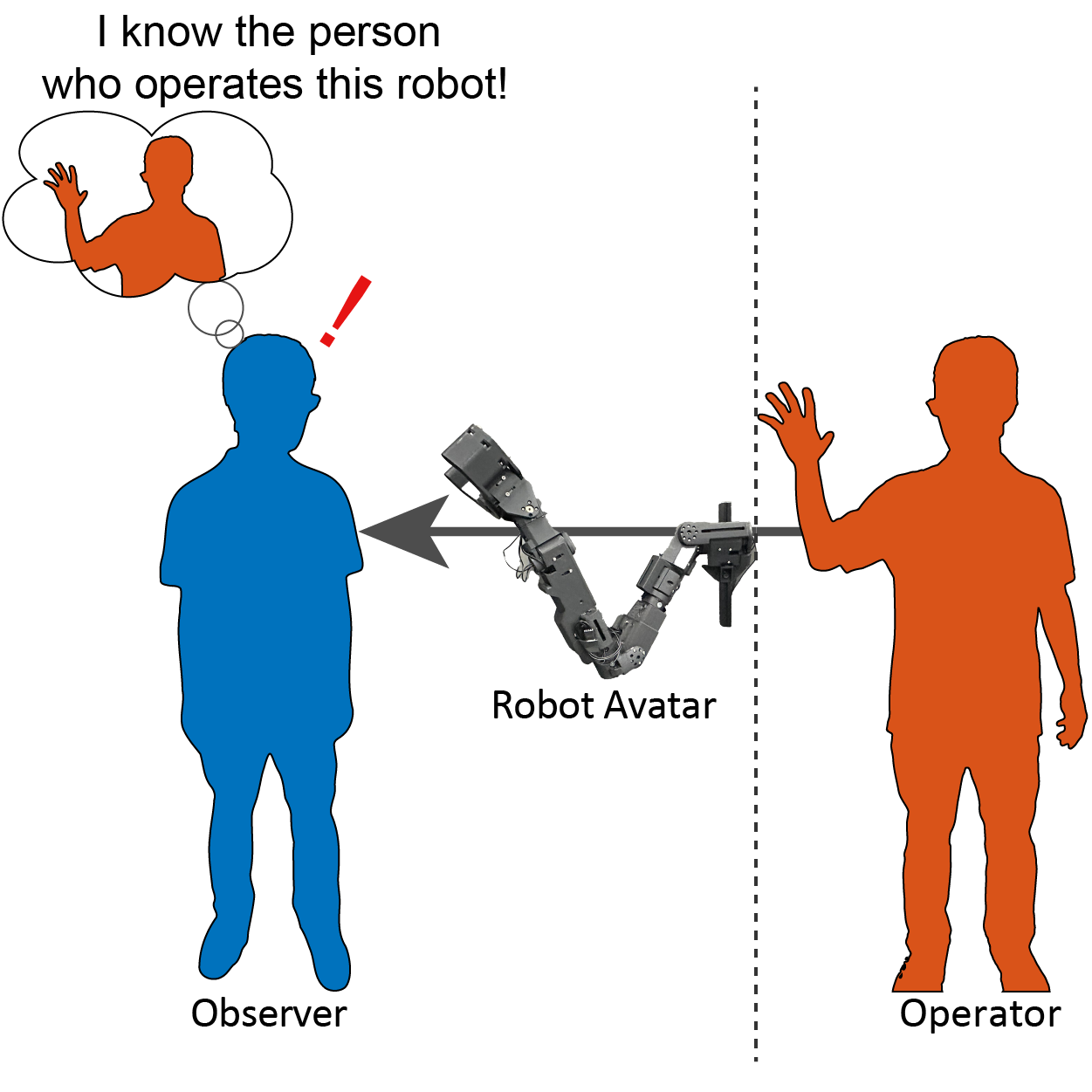
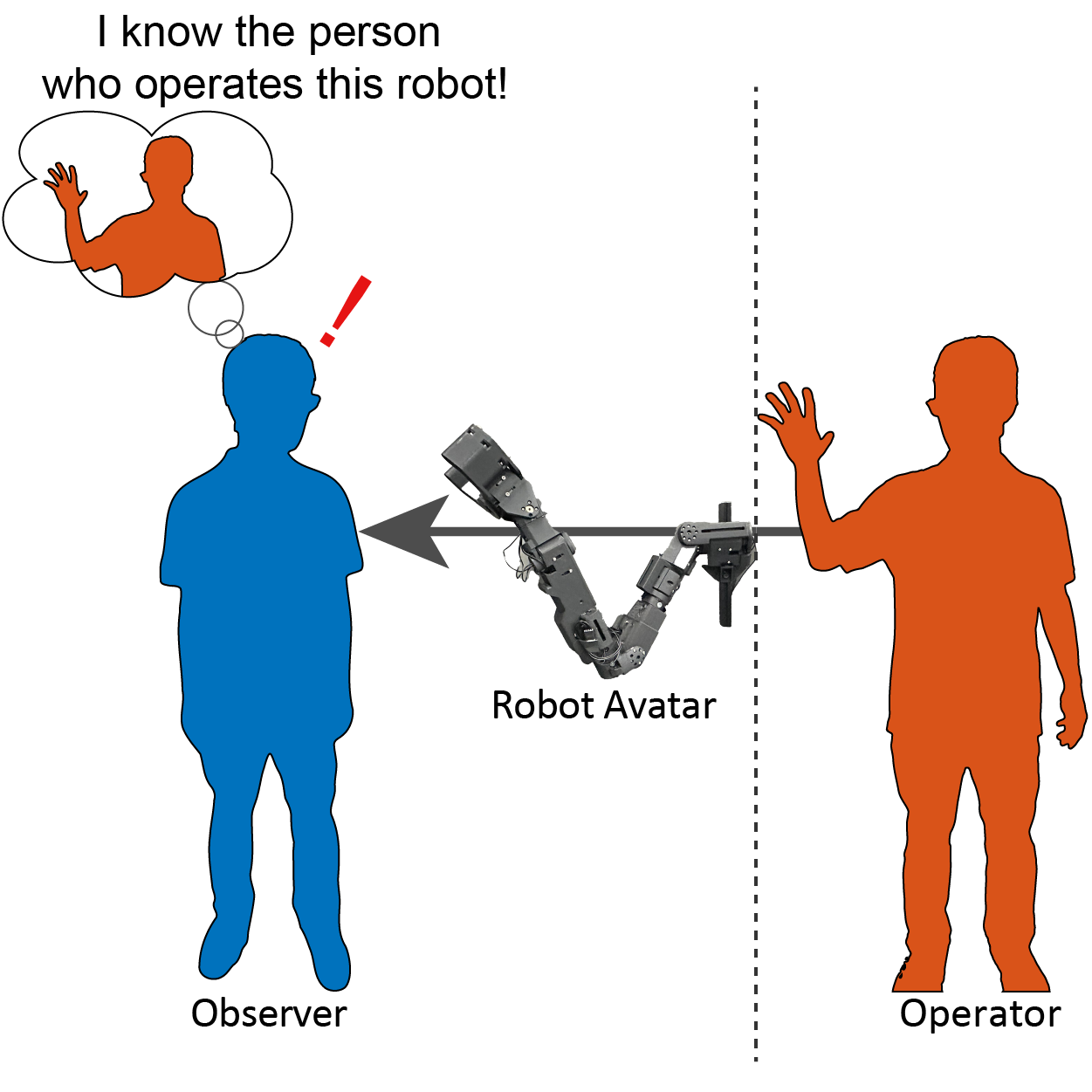
- ロボットアバターの設計における個人の運動特性の反映による存在感表出の予備的検討
〇味岡 俊嘉(慶應義塾大学大学院メディアデザイン研究科)、萩原 隆義(慶應義塾大学大学院メディアデザイン研究科)、安藤 良一(慶應義塾大学大学院メディアデザイン研究科)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、脇坂 崇平(慶應義塾大学大学院メディアデザイン研究科)、吉藤 健太朗(株式会社オリィ研究所)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - ロボットアバターは操作者の存在を他者に感じさせることができる.しかし,他者から見て操作者が誰なのかを認識できるような,個性の表出が可能な条件については明らかではない.本研究では,ロボットアームを手動で動かすことによって動作を記録,再生し,操作者の存在感を提示するシステムを開発した.その動作から他者が操作者の存在を感じるか,認知的変化が生起するかについて予備的検討を行った.
- 3D2-02
- 能動的なアバタ―変身がバーチャル身体化に及ぼす影響
〇村上 太一(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - これまでの身体化研究では、実世界の身体とは異なる外観をもつアバタへ身体化することによる変身の可能性が示されてきた。一方で、それらのアバタはユーザへ受動的に突然与えられており、ユーザが変身そのものへ作用する方法については調べられていない。そこで、本研究ではユーザの意図や能動性を変身に反映可能な変身プロセスを作成し、身体化感覚とユーザビリティへ与える影響について調べた
- 3D2-03
- 手足のみアバターによる疑似軟体所有感の誘発
〇廣瀬 修也(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - 手と足のみが自己身体と連動して動くアバターを観察すると、透明な身体が補間され<#%BR%#>て知覚され、それに身体所有感を感じる。ただし、手と足のアバターの位置をスクラ<#%BR%#>ンブルすると全身所有感が失われ、部位所有感のみが生じる。本研究では、手と足の<#%BR%#>空間的配置は崩さずにそれらの間を線で繋ぐことで、疑似的な軟体所有感を誘発でき<#%BR%#>ることを報告する。

- 3D2-04
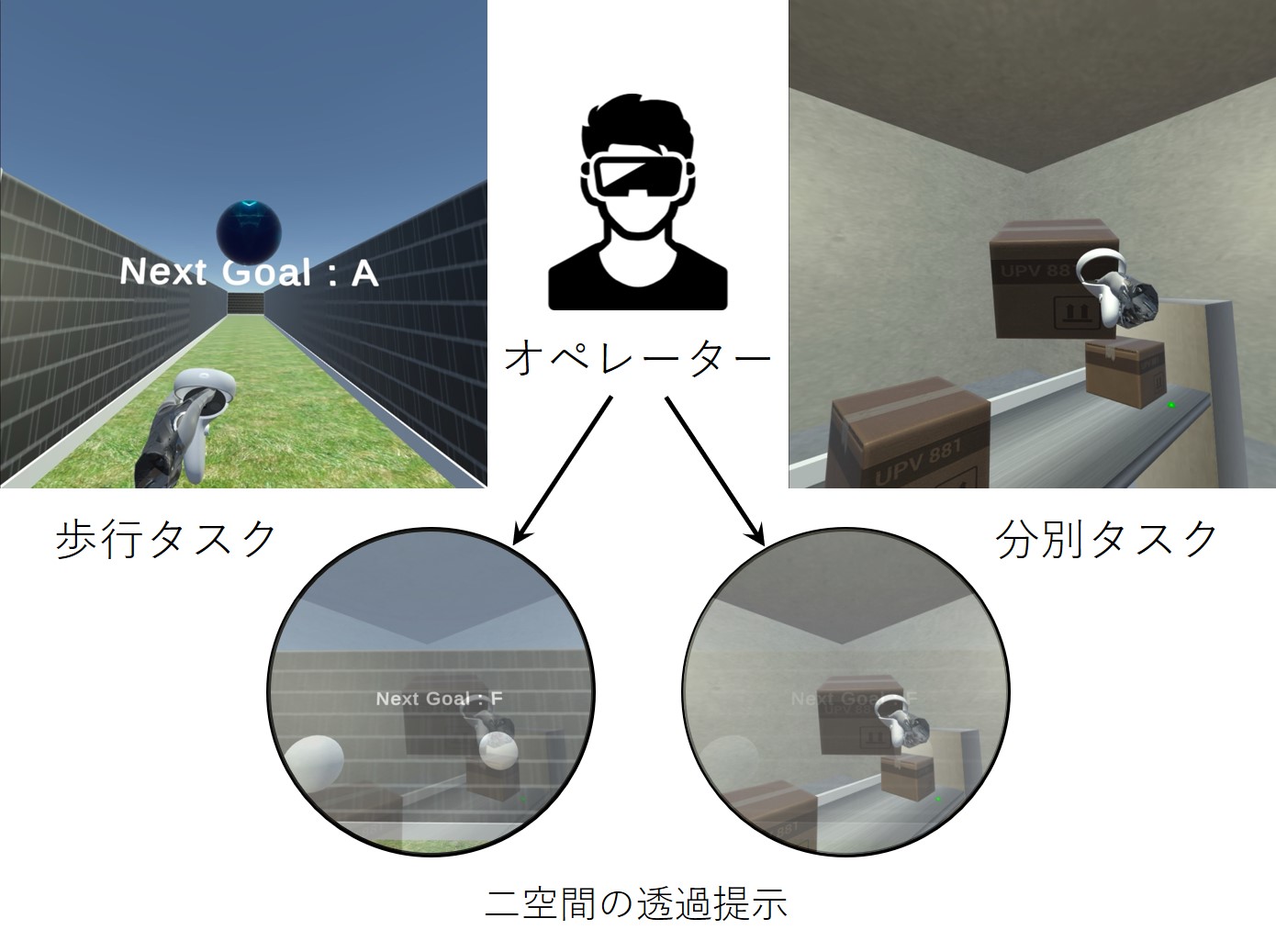
- 空間提示手法と指令入力手法の違いがVR空間での多重身体認知に及ぼす影響
〇芹澤 尚舜(東京都立大学大学院)、西内 信之(東京都立大学大学院)、福地 庸介(東京都立大学大学院)、YEM VIBOL(筑波大学)、池井 寧(東京大学) - 一人のオペレータが複数の遠隔空間の代理身体を操作するシステムが可能となれば,時間効率向上等の観点から社会的意義が大きい.そこで複数空間の提示手法(同時,切替,透過)及び代理身体に対する指令の入力方法(ボタン,音声)に依存した,多重身体認知の特性解明を目的としてユーザスタディを行った.質問紙で評価した結果,空間提示手法における透過提示が複数空間に存在する感覚を向上させていることが確認された.
- 3D2-05
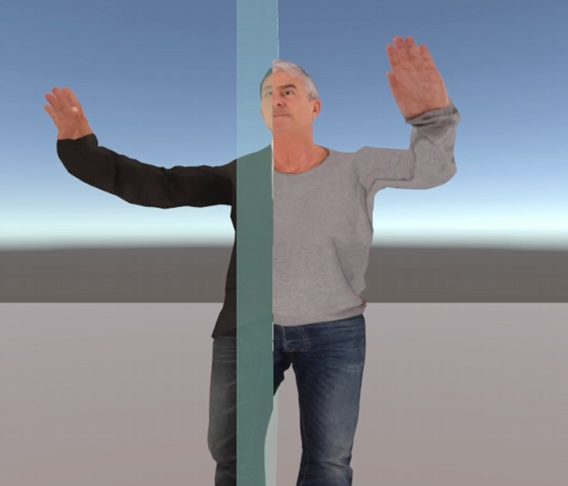
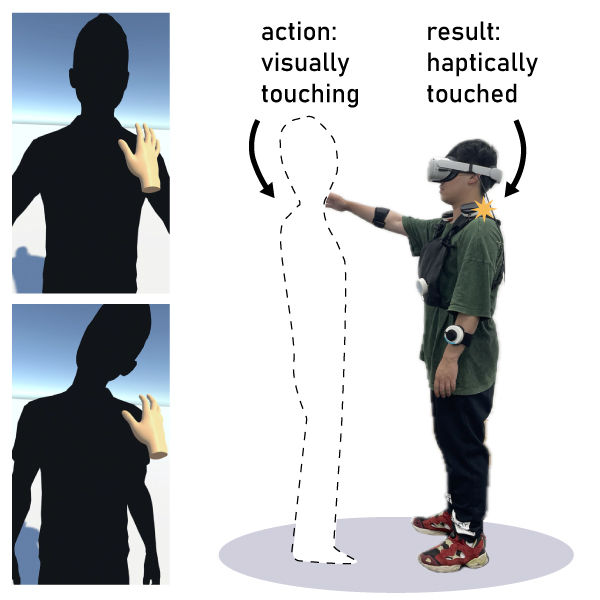
- ユーザーと異なる動きをするアバターへの身体性錯覚の予備的検討
〇中村 壮一(慶應義塾大学大学院メディアデザイン研究科)、脇坂 崇平(慶應義塾大学大学院メディアデザイン研究科)、梅原 路旦(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - ユーザー自身と同様の動きをするアバターへと身体性を転移することを目的とした様々な身体錯覚手法がこれまで提案されてきた.だがユーザーと同じ動作をしない人型アバターへと身体性を転移する手法開発は進んでいない.本研究では,ユーザーが自身とは異なる動作をする人型アバターに対しユーザー側から能動的に触れ,アバター側が感じるであろう触覚をユーザーにフィードバックするという手法を提案する.そのアバターとのインタラクションから生じるユーザーの身体錯覚および応用について予備的検討を行った.
- 3D2-06
- 自動表情変化アバタが及ぼす身体化感覚への影響
〇岡田 稜(明治大学)、三武 裕玄(明治大学) - アバタの表情は手の操作や顔トラッキングにより使用者が動作させるのが普通であるが, 他人からの接触を検知して自動で表情が変化するアバターも最近活躍している。こうした自動動作はアバターの身体化感覚を低下させ没入感を削いでしまう可能性がある。本研究では自動表情変化の使用時の身体化感覚について, 手の操作による表情変化の習熟度合や顔トラッキング使用の有無等の条件間で比較し, 影響を明らかにするとともに, 身体化感覚の低下が少ない自動表情変化を検討する。

- 3D2-07
- 半拘束型掌力触覚提示デバイスの基礎的検討 ー 示指の多様な動きへの対応化
〇吉田 大葵(富山県立大学)、田川 和義(富山県立大学) - 本研究では,1) 手指の複雑かつ多様な動作を許容しつつも, 2) 掌全体への力触覚提示をも可能とする新たな力触覚提示デバイスの実現を目指し,1) と 2) を両立させる方法として, 実際には自分の手は少ししか動いていないが, 仮想の手が大きく動く視覚情報を与えることで, 自分の手が大きく動くような運動知覚へと変容させる方法を用いる.これにより,掌全体への力触覚提示の難易度を軽減する.本稿では,示指の伸展・屈曲・内転・外転の運動知覚変容に関する実験を行った結果について述べる.
- 3D2-08
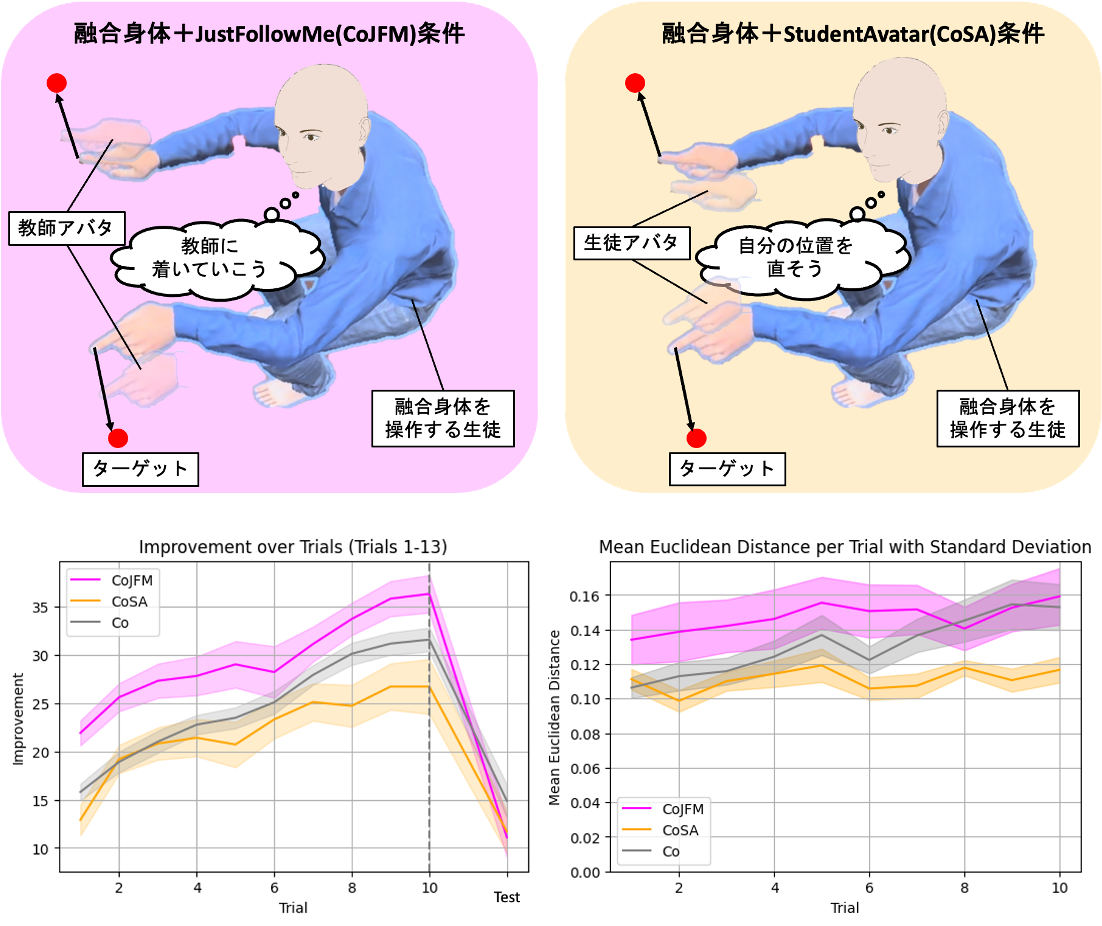
- 教師アバタの視覚フィードバックの付加が融合身体の運動学習に及ぼす影響
〇井上 大地(東京大学)、橋本 健(東京大学)、橋浦 健太(東京大学)、峯 大典(東京大学)、谷川 智洋(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学) - 加重平均型の融合身体は運動の学習を促すが、学習後に生徒が一人で融合時の動作を十分に再現できないという課題がある。原因として、融合中に教師の動作が先行することで生徒から離れ、生徒の動作が十分に教師と同期できないことが考えられる。本研究では既存の融合身体に教師アバタの動作の視覚フィードバックを付加し、融合中の生徒に教師の手を追従させることで、学習時の両者の動作の同期や学習効果への影響を調べた。
- 3D2-09
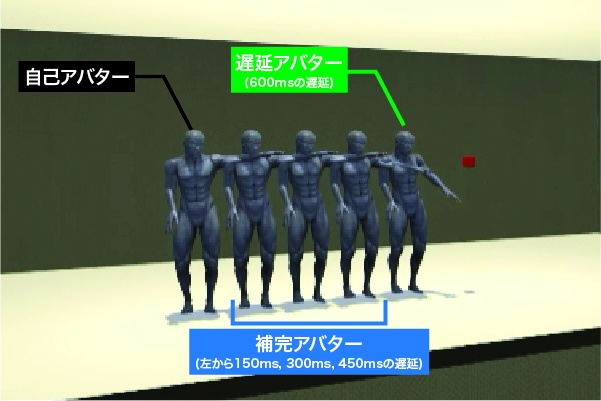
- 複数身体を介して遅延制御対象に運動主体感を生起させる手法
〇高田 一真(沖縄科学技術大学院大学)、近藤 亮太(東京大学)、杉本 麻樹(慶應義塾大学) - 自己の身体運動と制御対象の間に遅延が生じると,我々の運動主体感は減衰することが先行研究から明らかになっている.本研究では,遅延のある制御対象に運動主体感を生起させるために,自己身体と遅延の生じる制御対象の間に複数の異なる遅延を与えた身体を配置し,視覚的に運動を伝播させる手法を提案する.本手法を検証するために,バーチャルリアリティ環境下でのリーチング課題を実施し,運動主体感を測定する指標として主観的評定と意図的結合を用いた.結果,本研究の実験条件においては運動の伝播は必ずしも遅延のある制御対象に対する運動主体感を生起させるわけではないことが示唆された.
- 3D2-10
- バーチャル分身所有感における課題特性の効果
〇成川 駆武人(豊橋技術科学大学)、HAPUARACHCHI HARIN(豊橋技術科学大学)、小野寺 琉(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - 身体運動に対して遅延時間の異なる複数のアバターを同時に操作するバーチャル分身を実装した。そして、遅延のあるアバターに機能性を与えることで遅延による身体性の低下を軽減できるという仮説(機能性仮説)を立て、実験による検証を行った。遅延のあるアバターでも、創造的運動を課し機能性を持たせることで、遅延の無い身体でしかできないリーチング課題に対して、身体所有感の低下を軽減できることが示された。

- 3D2-11
- 取り下げ
- 3D2-12
- 山岳トレッキングとスキーを表現するバーチャルストックと身体運動感覚の研究
〇小島 優希也(東京都立大学)、岡本 正吾(東京都立大学)、ヤェム ヴィボル(筑波大学)、池井 寧(東京大学)
口頭発表10:10-10:50 、ポスター発表11:45-12:30
HMD・プロジェクタ
- 3E2-01
- 仰臥位でのVR体験向け非装着型空中浮遊HMDの基礎検討
〇古谷 佳輝(九州大学大学院システム情報科学府)、矢作 優知(東京大学大学院学際情報学府、日本学術振興会特別研究員DC)、菊池 知世(東京大学大学院総合文化研究科)、余合 彩子(個人)、清川 清(奈良先端科学技術大学院大学)、福嶋 政期(九州大学大学院システム情報科学府)
- 3E2-02
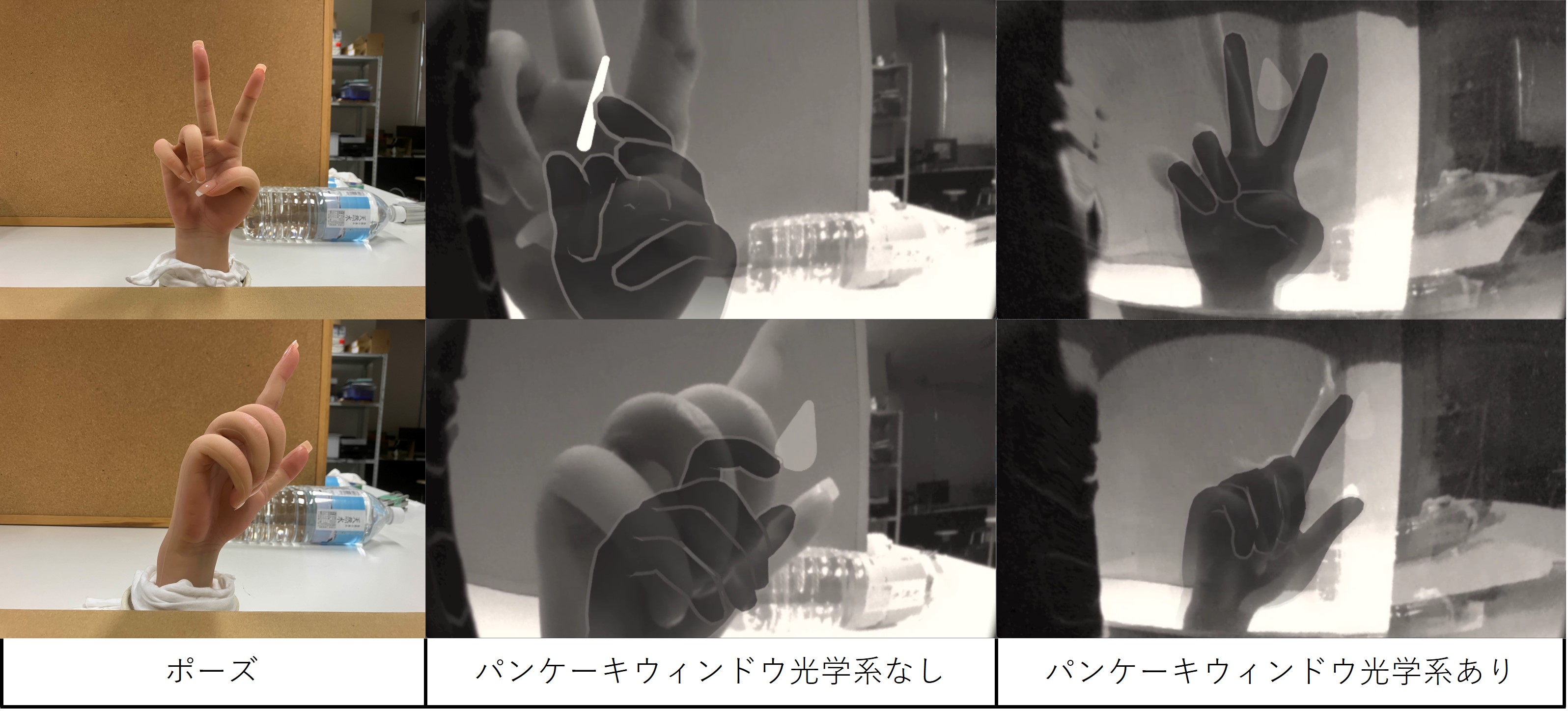
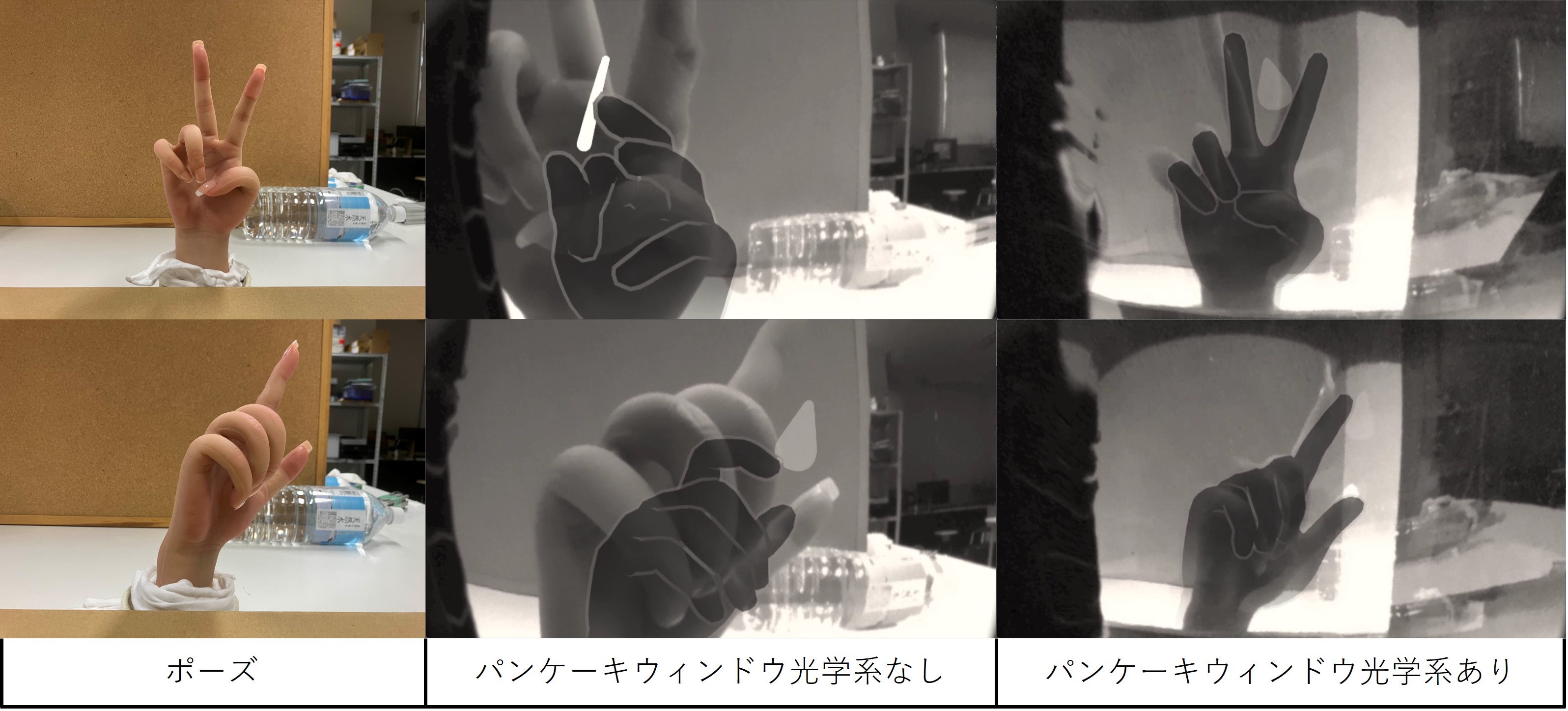
- パンケーキウィンドウ光学系のMeta Quest 2カメラへの適応
〇野倉 大輝(岐阜大学)、木島 竜吾(岐阜大学) - ビデオシースルーHMD Meta Quest 2はステレオカメラからデプスマップを推定し、世界を再構成する方式を取っているが、近距離だと対応点が取れず歪んでしまう。本研究では、Meta Quest 2にパンケーキウィンドウ光学系を装着し、視点を引くようにした。その結果、近距離における歪みの影響が小さくなること、Meta Quest 2のハンドトラッキング機能の性能が向上することを明らかにした。
- 3E2-03
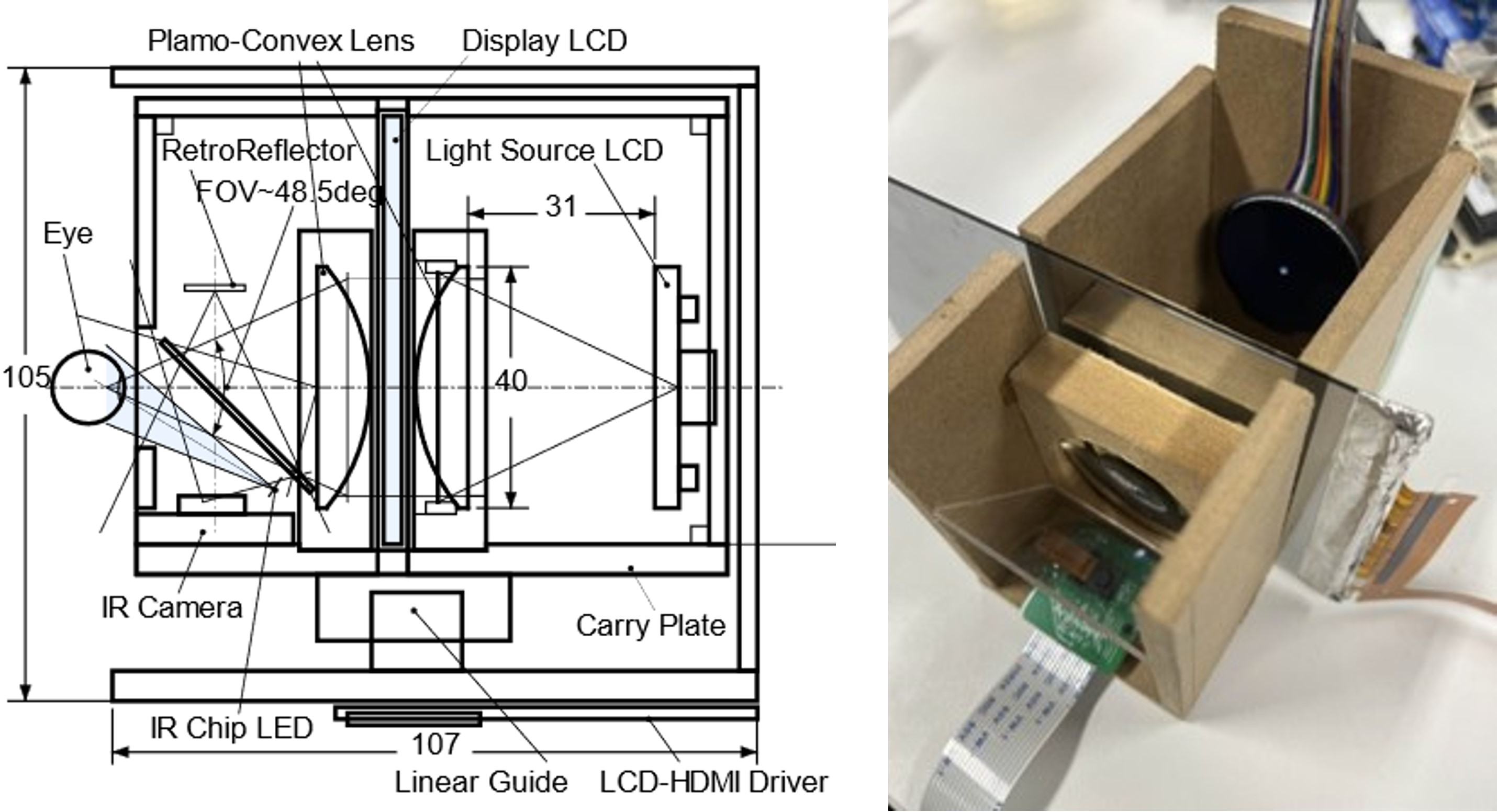
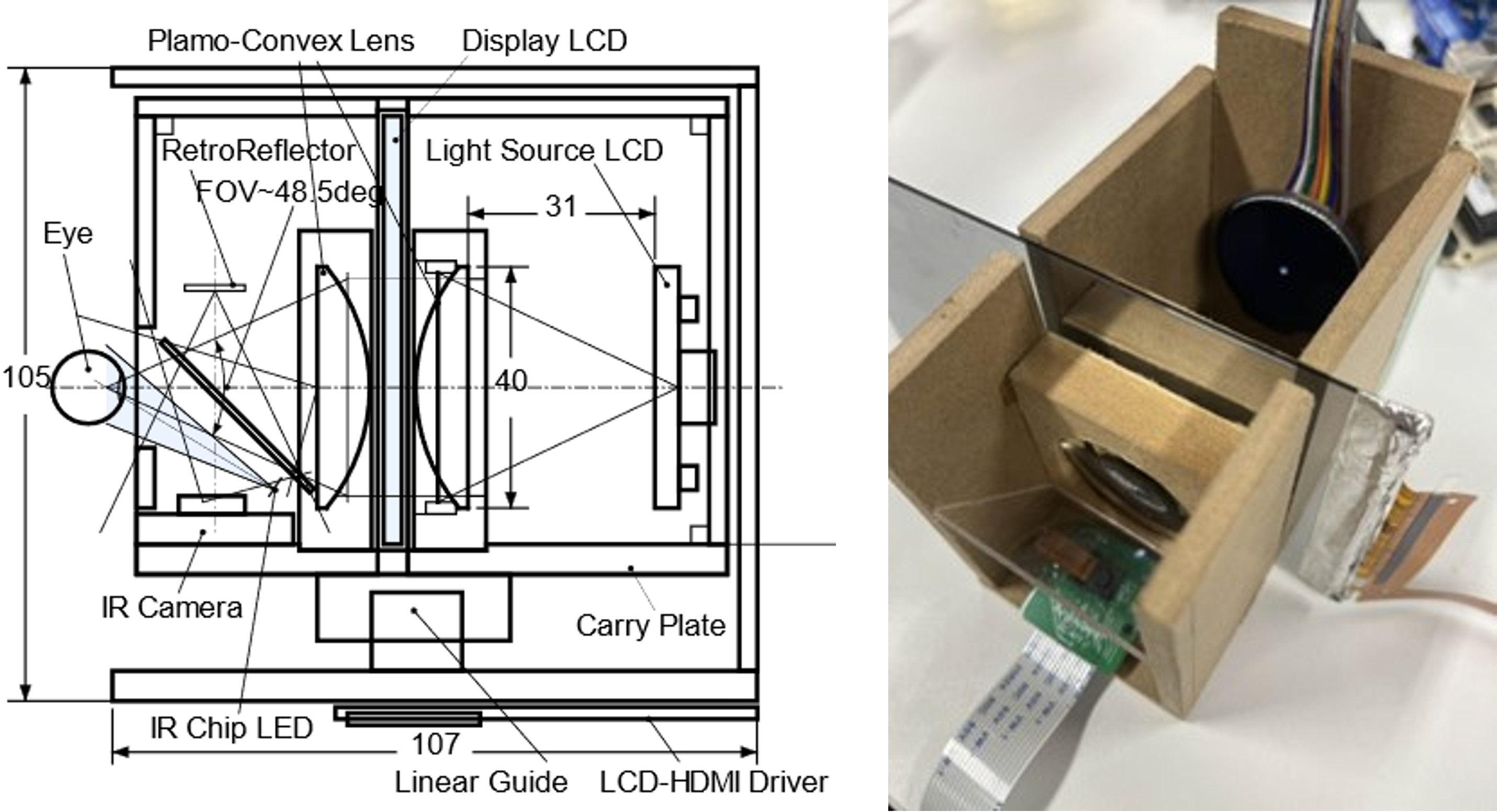
- アイトラッキング機能を備えたマクスウェル視ディスプレイの小型化
神谷 陸杜(岐阜大学)、〇野倉 大輝(岐阜大学)、木島 竜吾(岐阜大学) - マクスウェル光学系を用いた3次元ディスプレイは融像を容易にすることができるが,アイボックスが非常に小さく,少し目を動かすだけで像が見えなくなる.そこで,使用者の瞳をトラッキングしピンホール像が瞳を追うようにピンホール光源を動かす必要がある.本研究では,ピンホールとして液晶ディスプレイの液晶光源の画素を用いた.さらに,マクスウェル光学系を用いた3次元ディスプレイの小型化したHMDを設計,試作を行った.
- 3E2-04
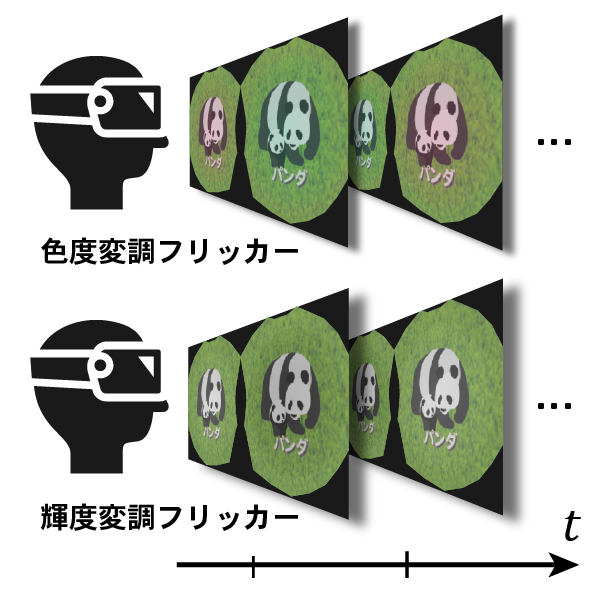
- 両眼に対する相補的な色振動付与の基礎検討
〇沈 有方(東京大学)、畑田 裕二(東京大学)、ハウタサーリ アリ(東京大学)、苗村 健(東京大学) - 本研究では、HMDを用いて画像の一部領域について、左右眼で相補的に見えるように輝度を一定に保ちながら異なる色度変調を提示する色振動を行った。その結果、両眼に同一の色度変調を提示する場合に比べて色振動の振幅半径を大きくしても明滅刺激の不可視性が保たれることが明らかになった。これにより、従来の輝度変調による視線誘導に比べてより不可視で自然な視線誘導を実現できる可能性がある。
- 3E2-05
- 2DモニターとHMDによる感情励起の調査
〇西川 翔(大阪工業大学大学院 工学研究科)、松下 祥久(大阪工業大学大学院 工学研究科)、藤村 真生(大阪工業大学) - 脳波(EEG)を用いた感情認識は、感情を識別するための簡単な方法を提供できるため、近年盛んに研究されている。この分野では、被験者に狙った感情を励起させるために動画を見せることがあり、この視聴には一般的に2Dモニターが用いられる。しかし被験者の視界に動画以外のものが入ることで感情励起に影響が出ることが考えられる。そこで本研究の目的は、HMDを使用し被験者を動画に集中させ、感情励起の変化を調査することである。

- 3E2-06
- VR体験中の疲労感軽減に関する研究
〇松下 祥久(大阪工業大学大学院 工学研究科)、西川 翔(大阪工業大学大学院 工学研究科)、藤村 真生(大阪工業大学) - VR体験はVR酔いだけでなく、HMDの装着による不快感、重さ、画面が近すぎることにより被験者の疲労感を高める可能性がある。映像体験中に首まわりの昇温や降温、視聴させる映像の変化によって、疲労感が軽減するか調査する。本研究では非侵襲的な計測のため、疲労感による自律神経系の乱れに着目し、瞳孔反応や脈波の変化から被検者の疲労感を比較する。また2Dディスプレイとの比較も実施する。

- 3E2-07
- 仮想現実におけるマルチプレゼンスシステムの認知負荷軽減のための柔軟な情報アシスタントの開発
〇陳 柏翰(早稲田大学)、岩田 浩康(早稲田大学) - ロボティクスと人間拡張技術の進歩に伴い、人間が同時に複数のロボットを遠隔操作できるマルチプレゼンスが将来の開発可能性として注目されているが、人間の認知負荷には限界があり実現が難しいである。本研究では、異なる種類のタスクを用いたVR内でのマルチプレゼンスシステムをシミュレーションし、情報アシスタントが認知負荷の改善にどのように役立つかを検討していく。また、タスクの種類に基づいて柔軟な情報アシスタントを開発し、認知負荷の異なる状態での情報取得効率を最適化することで、マルチプレゼンス全体のパフォーマンスを向上させることを目指している。

- 3E2-08
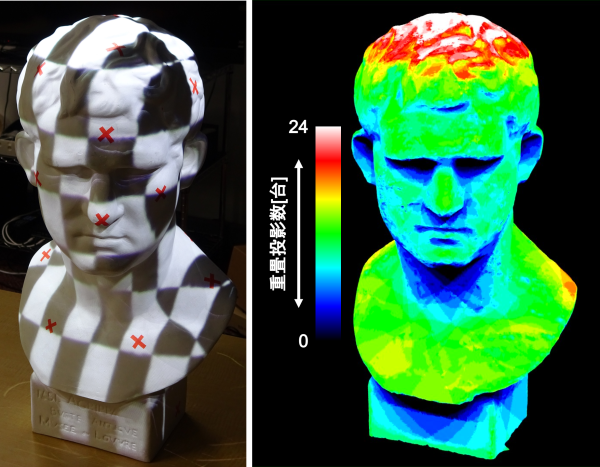
- 立体物への遅延なし影抑制プロジェクションマッピングのための多方向重畳マルチ投影の検討
〇岡本 峻宙(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - 多数のプロジェクタから構成されるプロジェクタアレイによる重畳投影手法では多方向からの投影を可能にする.これにより障害物による影の発生を抑制でき,対象の見かけを我々が見慣れた見かけに近づけることが出来る.本稿では多方向重畳マルチ投影システムによる立体物への投影のための,空間コード化法を用いた幾何較正手法について検討する.
- 3E2-09
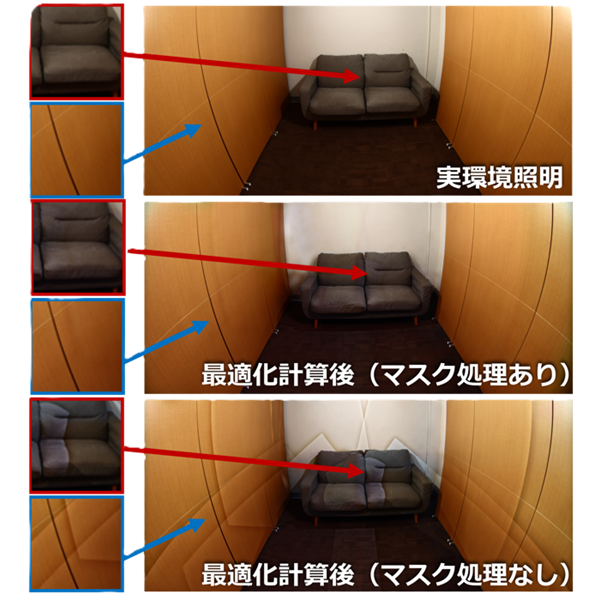
- 分散協調マルチプロジェクションシステムによる実環境照明再現
〇三浦 和之(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - 照明の空間的な制御は、プロジェクションマッピングにおいて重要な技術である。<#%BR%#>そこで一般的な室内照明を複数台のプロジェクタに置き換え、選択的に環境面を照らすことで、実環境照明の再現を行う。<#%BR%#>システム実装には、エッジコンピュータで各プロジェクタを制御する分散協調マルチプロジェクションシステムを用いる。<#%BR%#>分散協調最適化により得られた再現光をプロジェクタから投影し、疑似的な実照明環境を構築する。
- 3E2-10
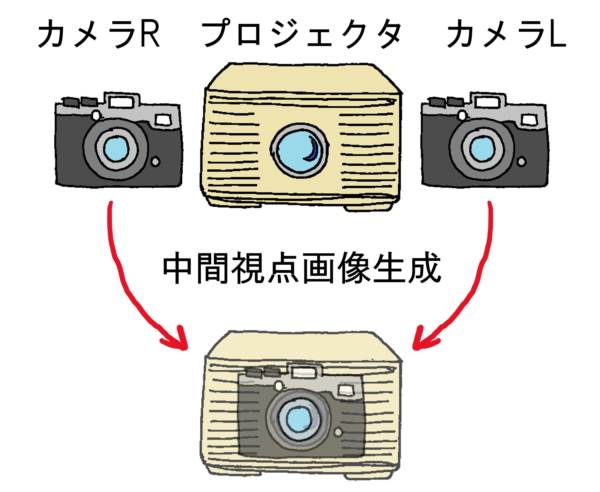
- 中間視点画像生成による疑似光軸一致型プロカムシステムの検討
〇藤井 航(筑波大学)、謝 淳(筑波大学)、北原 格(筑波大学) - 実世界の状況に応じたプロジェクションマッピングにおいては,プロジェクタとカメラを組み合わせたプロカムシステムが構築される.キャリブレーションの負担軽減を目指し,プロジェクタとカメラの光軸を一致させる手法が考案されてきた.本研究では,2台のカメラで撮影した画像をもとにプロジェクタの投影中心にて観測される画像を生成することにより,プロジェクタとカメラの位置姿勢を疑似的に一致させる手法を検討する.
- 3E2-11
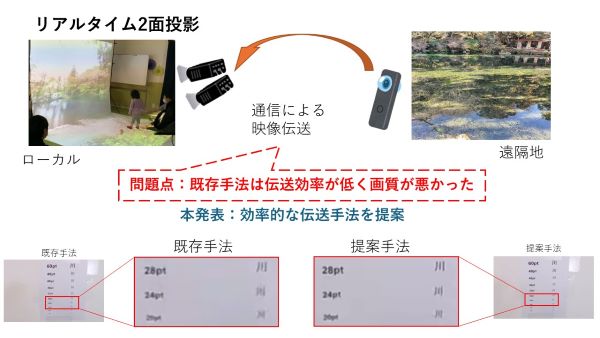
- 医療的ケア児のディストラクションにむけたリアルタイム2面投影の効率的映像伝送手法
〇岡田 恵里佳(群馬大学)、荻原 弘幸(群馬大学)、奥 寛雅(群馬大学) - 医療的ケア児のストレス軽減と社会的交流の促進を目指し,先行研究ではリアルタイム2面投影技術が提案されている.この手法は,360°カメラで撮影した映像をそのまま配信し,そこから2面の切り取りを行っている.しかし,配信映像の多くの画素が投影面に使用されず無駄が生じていた.そこで本研究では,効率的に配信映像の画素を使用できるリアルタイム2面投影手法を提案する.また,従来の手法と比較した結果を報告する.
- 3E2-12
- 光線場投影を用いたBRDF提示における質感再現性の評価
〇小段 海人(和歌山大学)、天野 敏之(和歌山大学) - 空間型拡張現実感の研究として,平面形状を仮定した鏡面反射物体に光線場投影を用いて BRDFに基づく視点移動の色彩変化を実現する方法が提案されている。ただし,提示対象が非平面の場合はスペキュラ周辺の色彩の順番が正しく提示されない.しかし,BRDFのような色彩変化を厳密に理解していて,それに基づき質感を判断しているのか.この問いに対して,主観評価実験を行い,結果から色彩変化を厳密に理解していないことを明らかにした.
技術・芸術展示コアタイム12:40-14:20
(終日展示可能)
- 3G-01
- 二眼カメラ立体映像をリアルタイムに大型裸眼立体視ディスプレイに表示できるシステムの開発
〇板宮 朋基(神奈川歯科大学歯学部総合歯学教育学講座教育学分野)、中野 亜希人(神奈川歯科大学歯学部総合歯学教育学講座教育学分野)、高才 東(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野)、清水 玲那(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野)、石田 孝文(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野)、小松 紀子(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野)、沢井 奈津子(神奈川歯科大学歯学部教育企画部)、安部 貴大(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野) - 本研究では,二眼カメラで撮影した立体映像をリアルタイムに27インチの大型裸眼立体視ディスプレイで立体視できるシステムを開発した.二眼カメラKandao Qoocam EGOで撮影している立体映像を,ソニー空間再現ディスプレイELF-SR2等においてリアルタイムに裸眼立体視できる.iPhone 15 Proを用いて撮影した空間ビデオも再生できる.歯科手技教育における有用性が示唆された.

- 3G-02
- 視覚と触覚の異種感覚併用提示による動作教示手法の提案
〇湯川 光(名古屋工業大学)、菅田 成人(名古屋工業大学)、池尻 周杜(名古屋工業大学)、平田 仁(名古屋大学)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科)、田中 由浩(名古屋工業大学、稲盛科学研究機構)
- 3G-03
- SkillPicker: 挟力情報を共有する技術伝達のためのピンセット型デバイス
〇松平 親慶(東京大学)、大伏 仙泰(東京大学)、大城 翔平(奈良先端科学技術大学院大学)、今井 雄星(東京理科大学)、貴嶋 紗久(産業技術総合研究所)、金澤 建彦(基礎生物学研究所)、塚谷 裕一(東京大学)、中島 敬二(奈良先端科学技術大学院大学)、稲見 昌彦(東京大学) - 生物学実験においてピンセットは不可欠なツールであり、中でもピンセットの挟力操作は実験結果を左右する技能として知られる。熟練者による挟力の教示が困難であるという課題に対し、我々はピンセット先端部の拡大像提示と挟力計測機能を組み合わせたピンセット型の技能伝達用デバイスSkillPickerを提案する。挟力の可視化や音階への変換を通じ、初心者は熟練者の挟力操作を体感的に習得可能となることが期待される。
- 3G-04
- 取り下げ
- 3G-05
- 人と植物の物理的接触を拡張するシステム(第2報): 接触により育成する電子ペットの設計と接触部位推定の基礎検討
〇林 海歩(筑波大学)、蜂須 拓(筑波大学) - 我々はこれまでに人と植物との物理的接触を拡張することを目的に,接触を検知して植物から人へ触覚刺激をフィードバックする機能を搭載した植木鉢を開発してきた.しかし,計測は接触の有無の検知にとどまっており,接触位置に応じたフィードバック等のインタラクションの設計が限定的であった.本稿では,容量性センシングを用いた接触計測技術において,接触位置を高精度に推定可能な植物の検討について報告する.
- 3G-06
- 有限要素法を用いた経皮電気刺激の電極配置最適化システム
〇太田 貴士(東京大学大学院)、葛岡 英明(東京大学大学院)、雨宮 智浩(東京大学大学院)、青山 一真(群馬大学) - 経皮電気刺激において,電極配置は重要なパラメータの1つであるが,ヒトの身体は複数の組織が複雑な構造をなしているため,特定の組織を効率的に刺激できる最適な電極配置を直観的に同定することは困難である.本研究では,有限要素法による電流シミュレーション結果の全探索により,膨大な電極配置条件から最適な電気刺激条件を同定するシステムを構築し,筋や腱,神経束などが複雑な配置をなす下肢における電気刺激の電極配置最適化を例に,本システムの有効性を検証した.
- 3G-07
- アバタの構造・動作の実装を効率化するツールキット「PoseSynth」の提案
〇山口 周(東京大学)、畑田 裕二(東京大学)、橋浦 健太(東京大学)、鳴海 拓志(東京大学) - 現実の身体のあり方を超越した構造・動作を有するアバタは様々な研究領域で役立てられている一方で,その実装方法は様々であり,再利用が困難である.本研究では,アバタの構造・動作を扱うための規格を策定し,多様な構造を有するアバタの多様な動作を効率良く実装できるツールキット「PoseSynth」を提案する.PoseSynthはアバタの姿勢を変換して別のアバタの姿勢に代入する処理を繰り返すことで,様々なアバタの動作を効率良く実装できる.
- 3G-08
- 咀嚼・嚥下中の視聴覚ノイズの遮断による風味と食感の向上
〇日塔 諒太(東京大学)、小宮 晨一(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - 食品が持つ繊細な風味や食感を高めるため,口腔内の感覚に集中し視聴覚ノイズを遮断することがある.本研究では,食品を口内に入れた瞬間に視聴覚ノイズを遮断し,嚥下が終了した瞬間に視聴覚ノイズを復元させることで,集中的注意が促進され風味や食感が向上すると考え,検証を行った. 予備検証の結果,提案手法の有用性が示唆された.

- 3G-09
- 取り下げ
- 3G-10
- 外界を表現する立体振動ディスプレイ 第10報:胴体装着型立体振動デバイスの定位精度評価
〇大原 玄(東北大学)、昆陽 雅司(東北大学)、田所 諭(東北大学) - 立体振動は,外界の振動源を定位させる,従来のファントムセンセーションによる定位を革新する振動触覚技術である.これまでに前腕や足裏の立体振動デバイスを開発したが,定位が装着部位周辺や床面上に限られ,身体周辺を上下左右に定位させることは難しかった.そこで我々は身体周辺を表現するために胴体装着型の振動デバイスを開発し,立体振動のアルゴリズムで駆動した場合の定位精度を測定しその有効性を報告する.
- 3G-11
- 呼吸運動を模した空中超音波刺激による仮想的な動物とのインタラクション
〇細井 十楽(東京大学)、金 杜(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - 動物とのインタラクションはアニマルセラピーや教育等の観点から需要が大きい。一方で、実際の動物との触れ合いは、アレルギーや外傷との危険性、倫理性の観点から制約がある。本研究では、非接触に触覚刺激を提示可能な空中超音波刺激を用いた仮想的な動物とのインタラクション体験において,呼吸運動を模擬した視触覚刺激を提示することを提案した.猫とのインタラクションを行う実験によって,猫の呼吸運動を視触覚的に提示することで,猫の生き物らしさについての主観評価が向上することを確認した.
- 3G-12
- 振動・熱刺激を用いたしびれ感覚の提示による衝撃感の向上
〇藤田 光(東京大学)、細井 十楽(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - VRにおいて衝撃感提示に関する多くの研究が行われてきたが,衝撃後の残効に関する研究は少ない.本研究では,残効の一つであるしびれ感覚を再現する振動・熱提示の効果を調査する.野球の打撃を再現した仮想環境と振動・撃力・熱提示が可能なデバイスを作成し,実験を実施した.結果,振動・熱提示がしびれ感覚を再現し,衝撃感を向上させることが確認された.特に高周波の振動がしびれ感覚と衝撃感のリアリティ向上に有意に作用した.

- 3G-13
- 取り下げ
- 3G-14
- テレロボットにおける安定した物体把持のための回転中心とモーメントの推定
〇街道 一翔(立命館大学)、柚 空翔(立命館大学)、安藤 潤人(立命館大学)、寒川 雅之(新潟大学)、野間 春生(立命館大学) - 本研究では,テレロボットの物体把持状態を検出して操作者に伝えることを目的とし,圧力と剪断力を計測可能なMEMS触覚センサを4つ用いた,センサの出力から回転中心とモーメントを推定可能なマイクロフォースプレートを開発した.評価実験ではフォースプレート上のある点を中心に回転をかけ回転中心を推定した.実験の結果,フォースプレートの中央付近の回転中心において推定値との誤差は0.7 cmとなり比較的正確に推定できた.
- 3G-15
- ソフト振動アクチュエータを用いた仮想物体の表面の質感を能動的に探索するための触覚提示システム
〇黒川 朝陽(立命館大学)、清水 真陽(立命館大学)、安藤 潤人(立命館大学)、野間 春生(立命館大学) - 本研究の目的はネット上で仮想物体の表面テクスチャ感を能動的に探索できる触覚提示システムを開発することである.そのために,光学センサと触覚ディスプレイを備えたデバイスと,デバイスの動きに応じて振動を提示するシステムを開発した.評価実験では異なる線幅の縦縞の触覚表現を識別するタスクから,知覚できる細かさを調査した.その結果,線幅が0.16 mm以上で触覚表現の細かさを知覚できることが示された.
- 3G-16
- 陶芸技能の伝承に向けた触覚提示システムの応用可能性の検討
〇朱 宇凡(慶應義塾大学大学院メディアデザイン研究科)、堀江 新(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 伝統工芸の職人の技能は身体知となっており、形式知化が難しいためその伝承方法が課題となっている。本研究は、職人の筋肉活動を計測し、感覚情報を直接に触覚によって提示することで、陶芸初心者に対して熟練者の技能への理解を深める技能伝承システムを提案する。提案したシステムを陶芸専門家や一般ユーザーに使用してもらい、システムのユーザー体験の評価に基づき、システムの陶芸技能伝承における応用可能性を論ずる。

- 3G-17
- 前後屈方向のハンガー反射提示装置の開発と評価
〇中村 拓人(東京大学)、葛岡 英明(東京大学) - これまでの頭部におけるハンガー反射制御装置は,ヨー軸である左右方向のハンガー反射を制御する装置であった.一方で,パッシブな装置によるピッチ軸やロール軸の力覚知覚は確認されていたが,それらを制御する装置開発には至っていなかった.そこで本研究では,新たな皮膚変形提示部位を発見することで,頭部のピッチ軸である前後屈方向のハンガー反射装置を開発した.
- 3G-18
- 運動学習支援のための周期的かつ離散的な制動力を提示する下肢装着型デバイスの装着性向上
〇高田 崇天(筑波大学)、蜂須 拓(筑波大学)、ハサン モダル(筑波大学) - 我々はこれまでに身体運動に対する感覚刺激のフィードバックによる運動学習の支援を目的に,膝関節の屈伸角度に応じて周期的かつ離散的な制動力をフィードバックするデバイスの設計・開発に取り組んできた.本デバイスの装着性には課題があり,使用者の実際の膝関節とデバイスが計測した角度の間に無視できない誤差が生じていた.本発表では,柔軟な装着性の実現によるフィードバックの質の向上を目指し,装具に蛇腹機構を,リンクにスライド機構を採用したデバイスの設計について報告する.

- 3G-19
- フレネルシェイプ:各指先接平面の傾きを操作する形状提示装置
〇太田 裕紀(奈良先端科学技術大学院大学)、平尾 悠太朗(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - 日常生活において人々は多様な形状の物体を把持・操作する.同様に,バーチャルリアリティ環境においても,形状を提示することが臨場感向上に寄与する.既存のハンドヘルド型形状提示装置は,指先相対位置の固定やピンアレイを利用して形状を提示しているが,これらの方法では各指先接平面の傾きという重要な感覚を再現できていない.そこで本研究では,主として各指先接平面の傾きを提示する新しい形状提示装置を提案する.
- 3G-20
- 非対称振動による温感の運動錯覚提示
〇伊藤 天翔(筑波大学 理工情報生命学術院)、田辺 健(産業技術総合研究所 人間情報インタラクション研究部門)、長谷川 晶一(東京工業大学 未来産業技術研究所)、家永 直人(筑波大学 システム情報系)、黒田 嘉宏(筑波大学 システム情報系) - 本研究では非対称振動が温感の運動錯覚を引き起こすか調査しその特性を検討する。温感は非接触の可視光LEDで提示し、運動錯覚には牽引力錯覚に用いられる非対称振動を適用する。温覚提示と非対称振動あるいは正弦波振動を用いた比較実験で、温度感覚に運動錯覚が生じるかに加え熱源移動時の運動感との比較や、錯覚を組み合わせた際の影響を調査した。本研究により振動子による温感の運動感提示が可能になると期待される。
- 3G-21
- 牽引力錯覚によって生じる手関節の弾道運動と行為主体感の不一致
〇田辺 健(国立研究開発法人産業技術総合研究所)、金子 秀和(国立研究開発法人産業技術総合研究所)
- 3G-22
- セルフリオネット:指先力入力システムによる全身アバタ操作と多様な触覚インタラクションの実現
〇平尾 悠太朗(奈良先端科学技術大学院大学)、橋本 健(東京大学)
- 3G-23
- ポータルを使った身体の分裂と自己位置の拡張
〇近藤 亮太(東京大学)、杉本 麻樹(慶應義塾大学) - バーチャル身体を左右に分裂させ,それに所有感を誘発することで,自己位置が拡張される。しかし,分裂によって所有感は弱くなること,身体近傍空間外の身体には所有感が生じないことがわかっているため自己位置の拡張範囲には限界がある。本研究では,ポータルを使って身体のつながりを補完することで,分裂した遠くの身体に所有感が生起し,自己位置が拡張されるか調べた。

- 3G-24
- ロボットアバターの設計における個人の運動特性の反映による存在感表出の予備的検討
〇味岡 俊嘉(慶應義塾大学大学院メディアデザイン研究科)、萩原 隆義(慶應義塾大学大学院メディアデザイン研究科)、安藤 良一(慶應義塾大学大学院メディアデザイン研究科)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、脇坂 崇平(慶應義塾大学大学院メディアデザイン研究科)、吉藤 健太朗(株式会社オリィ研究所)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - ロボットアバターは操作者の存在を他者に感じさせることができる.しかし,他者から見て操作者が誰なのかを認識できるような,個性の表出が可能な条件については明らかではない.本研究では,ロボットアームを手動で動かすことによって動作を記録,再生し,操作者の存在感を提示するシステムを開発した.その動作から他者が操作者の存在を感じるか,認知的変化が生起するかについて予備的検討を行った.
- 3G-25
- 手足のみアバターによる疑似軟体所有感の誘発
〇廣瀬 修也(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - 手と足のみが自己身体と連動して動くアバターを観察すると、透明な身体が補間され<#%BR%#>て知覚され、それに身体所有感を感じる。ただし、手と足のアバターの位置をスクラ<#%BR%#>ンブルすると全身所有感が失われ、部位所有感のみが生じる。本研究では、手と足の<#%BR%#>空間的配置は崩さずにそれらの間を線で繋ぐことで、疑似的な軟体所有感を誘発でき<#%BR%#>ることを報告する。

- 3G-26
- 取り下げ
- 3G-27
- 山岳トレッキングとスキーを表現するバーチャルストックと身体運動感覚の研究
〇小島 優希也(東京都立大学)、岡本 正吾(東京都立大学)、ヤェム ヴィボル(筑波大学)、池井 寧(東京大学)
- 3G-28
- Pin Ball:ハンドヘルド型球体ピンアレイインターフェース
〇杉本 隆平(電気通信大学)、梶本 裕之(電気通信大学) - 球面上に配置された直動アクチュエーターによって構成されるピンアレイによって、立体的な触覚提示を可能にするPin Ballを提案する。提案するデバイスは80本のピンアレイによって構成され、小型に設計された球型A-TUIである。全周囲に配置されたピンアレイが伸縮し、ユーザーの両手に立体的な形状や触覚を提示することができる。本稿では、球型A-TUIを構成する回路基板やアクチュエータに関する検討を示す。
- 3G-29
- 仰臥位でのVR体験向け非装着型空中浮遊HMDの基礎検討
〇古谷 佳輝(九州大学大学院システム情報科学府)、矢作 優知(東京大学大学院学際情報学府、日本学術振興会特別研究員DC)、菊池 知世(東京大学大学院総合文化研究科)、余合 彩子(個人)、清川 清(奈良先端科学技術大学院大学)、福嶋 政期(九州大学大学院システム情報科学府)
- 3G-30
- パンケーキウィンドウ光学系のMeta Quest 2カメラへの適応
〇野倉 大輝(岐阜大学)、木島 竜吾(岐阜大学) - ビデオシースルーHMD Meta Quest 2はステレオカメラからデプスマップを推定し、世界を再構成する方式を取っているが、近距離だと対応点が取れず歪んでしまう。本研究では、Meta Quest 2にパンケーキウィンドウ光学系を装着し、視点を引くようにした。その結果、近距離における歪みの影響が小さくなること、Meta Quest 2のハンドトラッキング機能の性能が向上することを明らかにした。
技術・芸術展示コアタイム12:40-14:20
(終日展示可能)
- 3G-31
- アイトラッキング機能を備えたマクスウェル視ディスプレイの小型化
神谷 陸杜(岐阜大学)、〇野倉 大輝(岐阜大学)、木島 竜吾(岐阜大学) - マクスウェル光学系を用いた3次元ディスプレイは融像を容易にすることができるが,アイボックスが非常に小さく,少し目を動かすだけで像が見えなくなる.そこで,使用者の瞳をトラッキングしピンホール像が瞳を追うようにピンホール光源を動かす必要がある.本研究では,ピンホールとして液晶ディスプレイの液晶光源の画素を用いた.さらに,マクスウェル光学系を用いた3次元ディスプレイの小型化したHMDを設計,試作を行った.
技術・芸術展示コアタイム12:40-14:20
(終日展示可能)
- 3G-32
- 裸眼立体視とハプティクス技術を併用した歯牙切削トレーニングシステムの開発
〇富田 凜太郎(神奈川歯科大学)、板宮 朋基(神奈川歯科大学)、中野 亜希人(神奈川歯科大学)、川西 範繁(神奈川歯科大学)、星 憲幸(神奈川歯科大学)、木本 克彦(神奈川歯科大学) - 本研究では裸眼立体視技術とハプティクス技術を併用し,歯科教育において重要な項目の一つである歯牙切削手技の効果的な向上を目的としたトレーニングシステムを開発した.歯列の3D-CGモデルと切削器具の三次元的な位置と角度を裸眼立体視ディスプレイ上に表示し、ペン型ハプティクスデバイスを用いてリアルタイムな歯牙の切削・形成と自動採点が可能である.歯科医師による評価の結果,本システムの有用性が示唆された
OS14:30-15:50
香り・味提示のこれから:予想と期待
- OS3A4
- 香り・味提示のこれから:予想と期待
〇谷川 智洋(東京大学)、松倉 悠(電気通信大学)、和田 有史(立命館大学)、宮下 芳明(明治大学)、春原 吉美(ドリームフレグランス株式会社)、新島 有信(日本電信電話株式会社)、中野 萌士(東京大学)、高野 詩菜(日本電信電話株式会社) - 香りまたは味を提示する装置や技術の実用化が徐々に進みつつありますが,一般にはまだまだ身近な存在とは言えません.これからの香り・味提示はどうなるのでしょうか?また,どうあるべきでしょうか?本OS企画では,当該研究分野でアクティブに活動を行う様々な年代の研究者や技術者を6名ほどお招きし,それぞれ思い描く香り・味提示に関する予測や期待について10分程度ご講演頂きます.最後には,聴衆の方も含めて香り・味提示の未来について自由に討論を行い,香り・味提示の進むべき道筋や新たな可能性を探ることを目指します.

OS14:30-15:50
VRの若手育成推進と連携(仮)
- OS3B4
- イマーシブメディアと都市指向VRの将来像
〇池井 寧(東京大学)、半田 拓也(NHK放送技術研究所)、石田 康平(東京大学) - VRメディアの将来を展望するために,2つの観点から講演をお願いした.最初に,NHK放送技術研究所で考えられているイマーシブメディアについてご紹介いただくこととした.NHK技研ではメディアの将来像として豊富な実験的・実践的試みを行っており,半田氏は特にVRと共通の概念を有するイマーシブ・メディアを先導されている.次に,若手の異才として建築の観点からVRと都市を考察し,数々のインスタレーションを発表されている石田氏に,VRと都市の公共空間の観点から新規提案をいただくこととした.これらのご講演から今後のVRの可能性について議論する.
OS14:30-15:50
メタバースの生活史:ユーザの人生の断片からメタバース文化を考える
- OS3C4
- メタバースの生活史:ユーザの人生の断片からメタバース文化を考える
〇鳴海 拓志(東京大学)、長谷川 晶一(東京工業大学)、平木 剛史(クラスター メタバース研究所)、畑田 裕二(東京大学) - 本OSでは、事前に集めた主要なメタバースプラットフォームのユーザーによる語りの映像(メタバースの生活史)を手がかりに、メタバース文化について考える。個別具体的な「人生の断片」から出発することで、近年VR分野で注目が集まっているメタバースの独創的な文化のみならず、メタバースが現実生活のタイムラインのどこかに溶け込んでいる「何気ない日常」も取り上げながら、メタバース文化研究の指針や課題について議論する。