Sept. 11 2024
9月11日
このプログラム速報版は8月26日暫定版です.座長は掲載していません.
投稿原稿PDFは9/10(火)16:00公開予定のWeb予稿集に掲載されます.
(原稿投稿時にプログラム速報版へのサムネと発表要旨の公開不可を選択された方はWeb予稿集にのみ掲載されます)
(Web予稿集公開時に, プログラム速報版をWeb予稿集に差し替えます)
口頭発表09:30-10:10 、ポスター発表10:55-11:40
クロス・マルチモーダル1
- 1A1-01
- 視覚過敏がハンドリダイレクションの知覚閾値に与える影響の検証
〇松本 啓吾(東京大学大学院情報理工学系研究科)、小川 真輝(東京大学大学院情報理工学系研究科)、加藤 路瑛(株式会社クリスタルロード 感覚過敏研究所)、畑田 裕二(東京大学大学院情報学環)、鳴海 拓志(東京大学大学院情報理工学系研究科)
- 1A1-02
- 課題非関連の視触覚情報の呈示による触覚感度の変調
〇羽鳥 康裕(労働安全衛生総合研究所)、石井 圭(産業技術総合研究所) - 触覚情報は物体の操作など,外界とのインタラクションを行う上で重要である.本研究では,課題非関連の視触覚情報の呈示による触覚感度の変調を計測した.課題非関連の視覚情報が呈示されたことによる触覚感度変化と課題非関連の触覚情報が呈示されたことによる触覚感度変化には正の相関が見られた.この結果は,課題非関連の情報呈示による感度変化には個人差が存在することを示唆する.
- 1A1-03
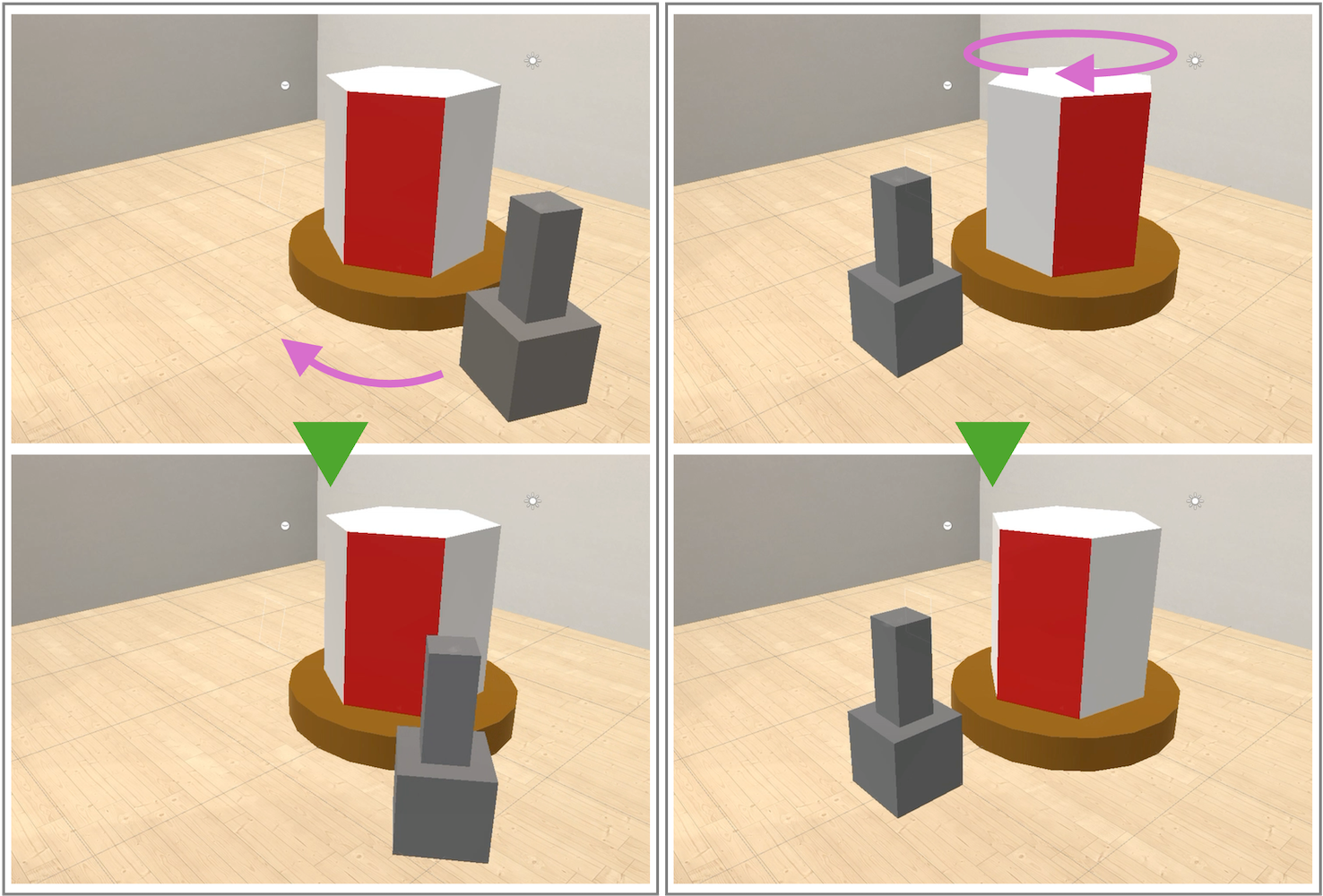
- 物体の持ち下げを主体とした動作における重量知覚Pseudo-haptics手法の提案
〇島村 一輝(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - Pseudo-hapticsと呼ばれる触覚提示技術を用いた重量提示手法が注目を集めている.一方で,そのほとんどが物体の持ち上げ時に重量提示するものであり,物体を持ち下げる動作によって重量提示可能であるかは明らかでない.我々は従来手法の持ち下げ動作における有効性を検証した後,新たに考案した持ち下げ動作時の重量提示手法の効果について検証する実験を行った.その結果,提案手法の一定の有用性が示された.
- 1A1-04
- VRシミュレータ酔いへの順応における文脈依存性の検証
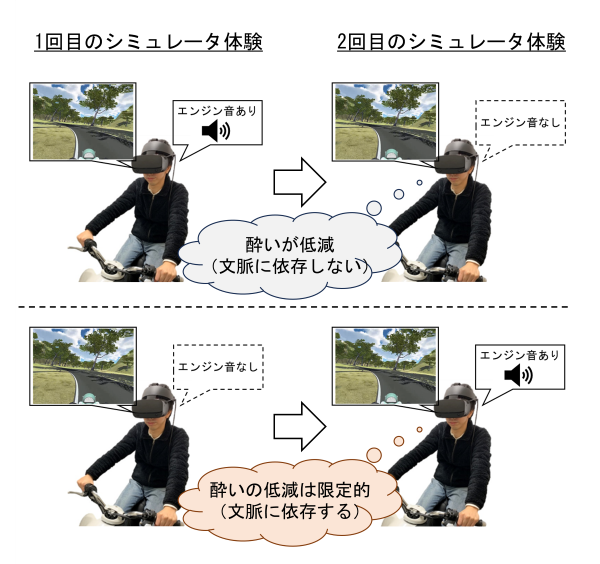
〇加瀬川 智皓(静岡大学)、山脇 ユミ(静岡大学)、人見 利玖(静岡大学)、宮崎 真(静岡大学) - 参加者は,バイク型のVRシミュレータの走行映像を1時間の休憩を挟んで2回経験した.文脈刺激としてエンジンの音を用いた.その結果,1回目で音有,2回目で音無の映像を経験した群では,酔いへの順応(酔いの低減)が生じた.一方,1回目で音無,2回目で音有の映像を経験した群では,酔いへの順応は限定的であった.単感覚条件での酔いへの順応は,その文脈に依存し,多感覚条件に十分に転移しないことが示唆された.
- 1A1-05
- MR環境下でのPseudo-haptics利用による空間的不整合の視認が重さ知覚に与える影響の解明
〇小林 修也(東京大学)、島村 一輝(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - MR環境下のPseudo-hapticsでは実際の身体と仮想オブジェクト間の空間的不整合が視認されるため生起が困難だと考えられているが、実証されていない。そこで本研究ではMR空間内でのPseudo-haptics利用による空間的不整合の視認が重さ知覚に与える影響を調べた。特に、持ち上げる際の視線方向がMRでのPseudo-haptics効果に影響を与えるという仮説を立て、検証した。
- 1A1-06
- VRモーションベースを用いた物理運動のデザインとユーザー体験の評価 (2) ~上下移動を対象として
〇出口 和希(早稲田大学)、山下 希巳(早稲田大学)、河合 隆史(早稲田大学) - VRコンテンツに対して、モーションベースによる物理刺激を随伴して提示することで、ユーザー体験が変化することが知られている。筆者らは、視覚運動がモーションベースの可動域を超える場合などに、視覚情報が物理運動を補完する現象に着目した検討を行ってきた。本稿では、エレベーターを対象として、2軸のモーションベースを用いた上下移動のデザインならびにその効果について、実験的な検討を行った。

- 1A1-07
- 重さ表象に関わるエッセイの質的分析を通じた重さ知覚誘発要因の探索
〇平尾 悠太朗(奈良先端科学技術大学院大学)、畑田 裕二(東京大学大学院情報学環)
- 1A1-08
- VRモーションベースを用いた物理運動のデザインとユーザー体験の評価 (1) ~振り子運動を対象として
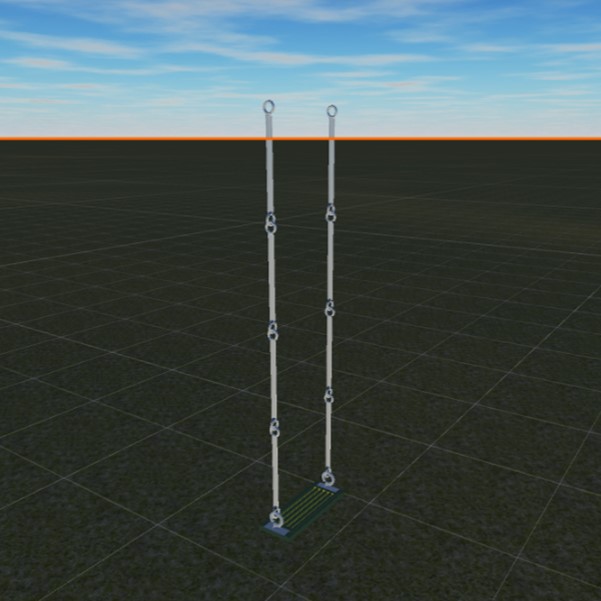
〇山下 希巳(早稲田大学)、出口 和希(早稲田大学)、河合 隆史(早稲田大学) - VRコンテンツに対して、モーションベースによる物理刺激を随伴して提示することで、ユーザー体験が変化することが知られている。筆者らは、視覚運動がモーションベースの可動域を超える場合などに、視覚情報が物理運動を補完する現象に着目した検討を行ってきた。本稿では、遊具であるブランコを対象として、2軸のモーションベースを用いた振り子運動のデザインならびにその効果について、実験的な検討を行った。
- 1A1-09
- ASMRの聴覚刺激による唾液分泌量の変化と持続性の関係
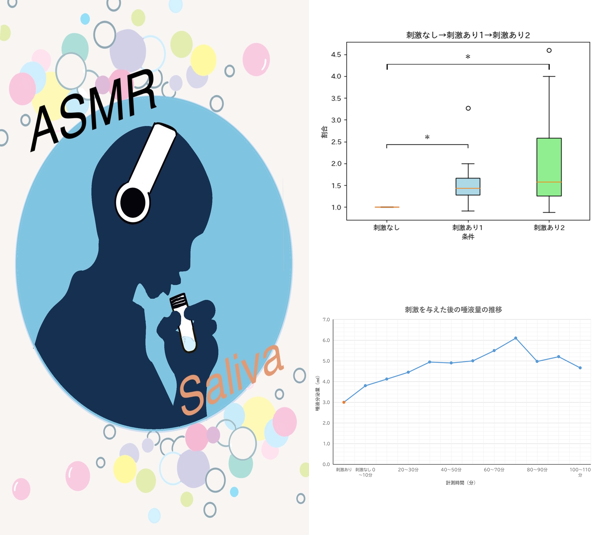
〇森嵜 隼一郎(名城大学)、柳田 康幸(名城大学)、坂野 秀樹(名城大学) - 唾液分泌量は味覚に影響することが知られている.聴覚による味覚へのクロスモーダル効果を念頭に置き,まずは基礎段階として聴覚刺激により唾液分泌量に変化が生じるか,実験により調査した.その結果,音刺激による唾液分泌量の変化が確認されるとともに,音刺激に対する唾液量変化の応答が,数分で発生・消失するものではなく,一定期間持続性があることが示唆された.
- 1A1-10
- 禅Ride: 自動運転車におけるXRマインドフルネス
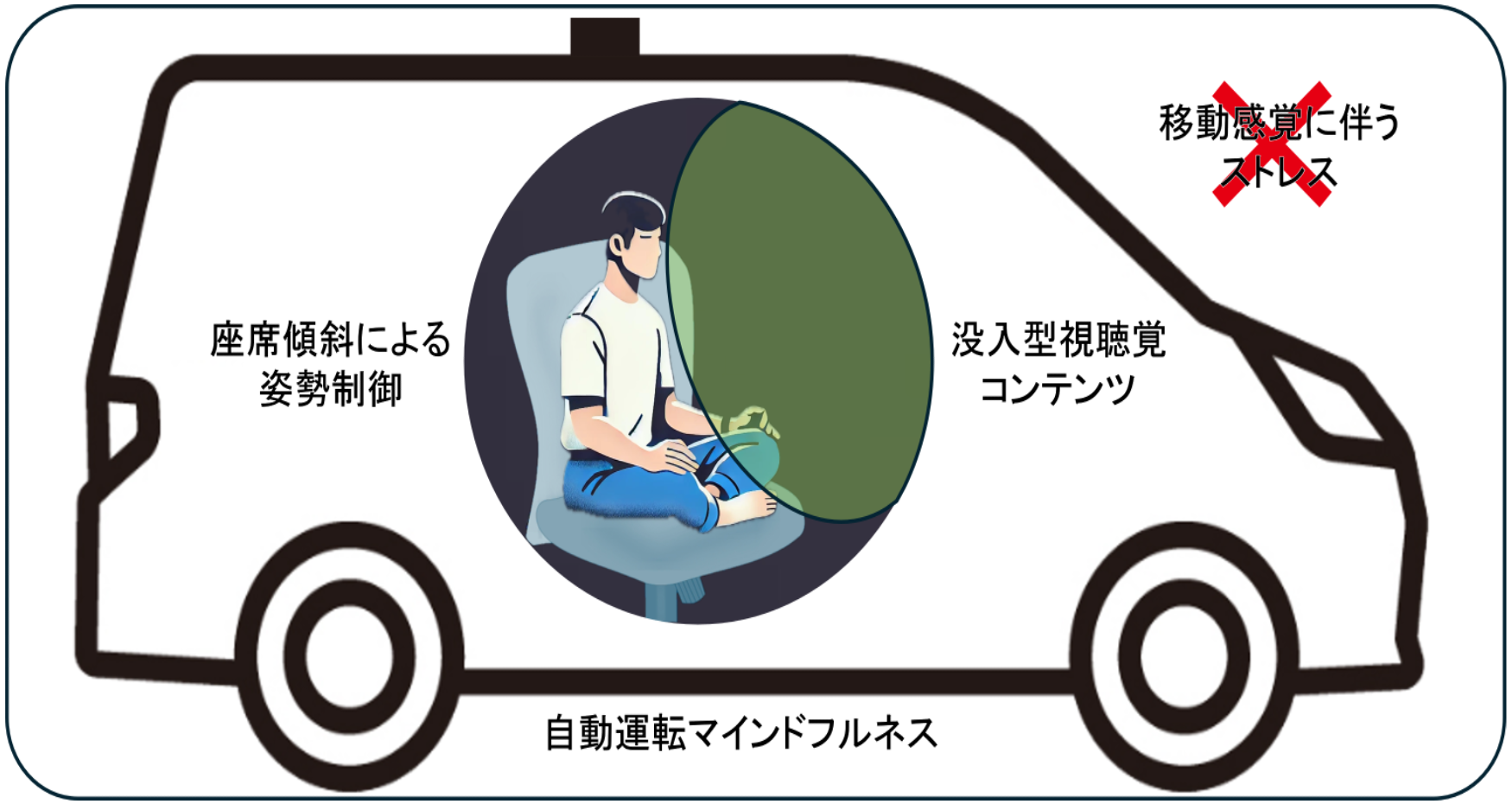
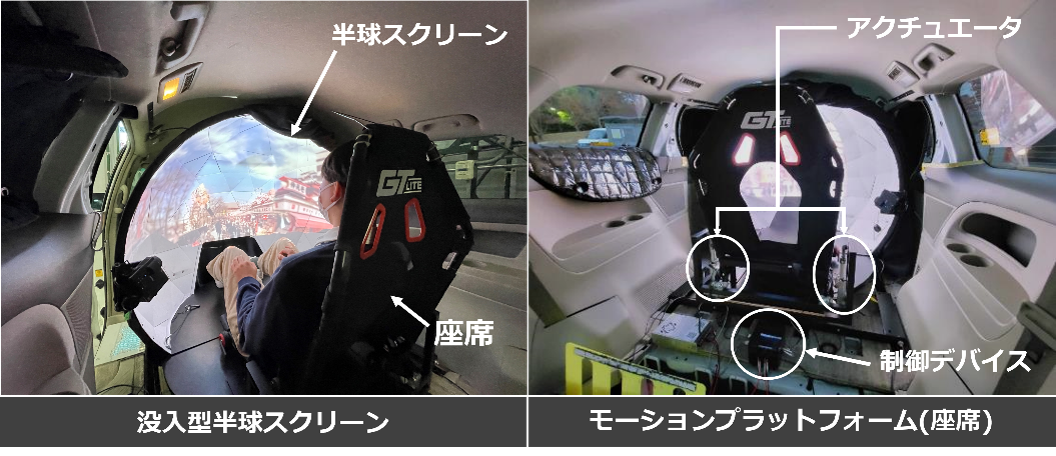
〇秋吉 拓斗(奈良先端科学技術大学院大学)、的場 悠希(奈良先端科学技術大学院大学)、澤邊 太志(奈良先端科学技術大学院大学) - 自動運転によって運転者は運転行為から解放され,車内での自由な活動が可能になる.その活動の一つとして,車内での移動時間を利用し,心を落ち着かせ,ストレス軽減をし,マインドフルな体験を可能とする活動に注目が集まっている.本研究では,自動運転車内における没入型映像による視聴覚刺激やモーションプラットフォーム座席による前庭感覚刺激および体性感覚刺激からの姿勢制御を包含するXR技術を活用した,新たな自動運転マインドフルネスの支援システムを提案する.
- 1A1-11
- 移動ロボットを用いた動的な触覚刺激がハプティックリターゲティングの知覚閾値へ及ぼす影響
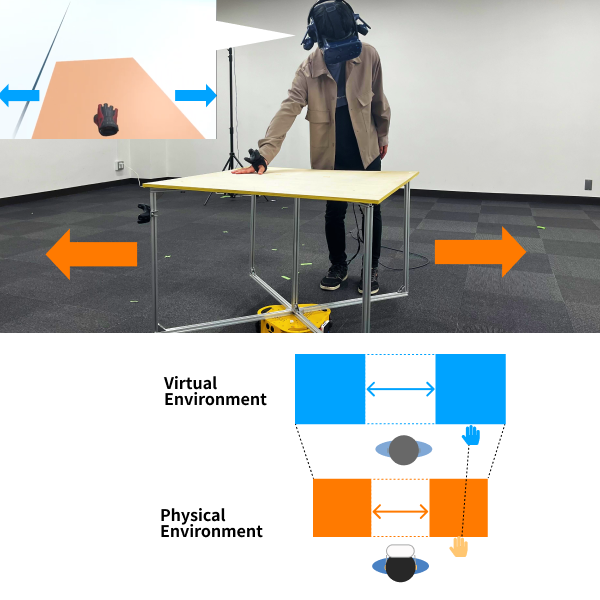
〇横井 総太朗(東京大学)、松本 啓吾(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学) - 実際の手とバーチャルハンドの位置・姿勢をずらして視覚提示することで実物体に触れる感覚をバーチャル物体に実環境からずらして対応づける手法としてハプティックリターゲティング(HR)が研究されてきた.先行研究では静止物体に触れる状況の検討がほとんどであるのに対し,本研究では台車型ロボットを用いて動的物体に触れる際のHRの効果を調査した.その結果,動的物体の活用は接触物体のサイズ知覚の閾値を拡大させる傾向が示された.
口頭発表09:30-10:10 、ポスター発表10:55-11:40
スポーツ・健康
- 1B1-01
- 肩甲骨の動きが検出可能なセンサの提案
〇佐藤 光流(湘南工科大学)、堀越 力(湘南工科大学) - 近年,身体拡張の研究は多岐に渡っており,従来の手法は体の別部位の動きを利用して拡張部位を操作している.本研究では,腕や足以外の部位を使った入力方法として肩甲骨に注目し,通常動作を制限することなく拡張部位を操作することを目指した.肩甲骨による背部の形状変化を曲げセンサで計測する手法を検討し,その結果,肩甲骨の回転運動の計測が可能であることを示す.

- 1B1-02
- ウインドサーフィン シミュレータにおいて実写とCGを重畳することがスピード体感に与える影響の検討
〇籔内 勉(日本電信電話株式会社)、井上 照久(日本電信電話株式会社)、瀬下 仁志(日本電信電話株式会社) - ウインドサーフィンは海上を高速で走行するため、指導者がそばにつくのが難しいという問題がある。そこで我々は練習を効率化するために、ボードとセイルの角度を再現し360度映像をHMDで表示するシミュレータを開発した。海上を走行する実写映像にCGオブジェクトを重畳することでベクション現象によってスピード感が向上するか実験した結果を報告する。

- 1B1-03
- 高齢者のVR体験ウォークスルーをガイドする介護者用ARシステム
〇山本 達也(大阪大学大学院基礎工学研究科)、岩井 大輔(大阪大学大学院基礎工学研究科)、仁木 一順(大阪大学大学院薬学研究科)、佐藤 宏介(大阪大学大学院基礎工学研究科) - VR体験に不慣れな高齢者がウォークスルーを自ら操作を行うことは困難で,VR酔いで体調が急変する可能性もある.そこで,HMDを装着、または抱人形型ディスプレイを把持してVR体験中の高齢者の操作をガイドするとともに、高齢者の体調もモニタリングできる介護者用ARシステムを提案する.プロトタイプを実装するとともに,本システムの要件定義を検討し、操作性とともに介護者と高齢者が会話しやすい位置関係を考察した.

- 1B1-04
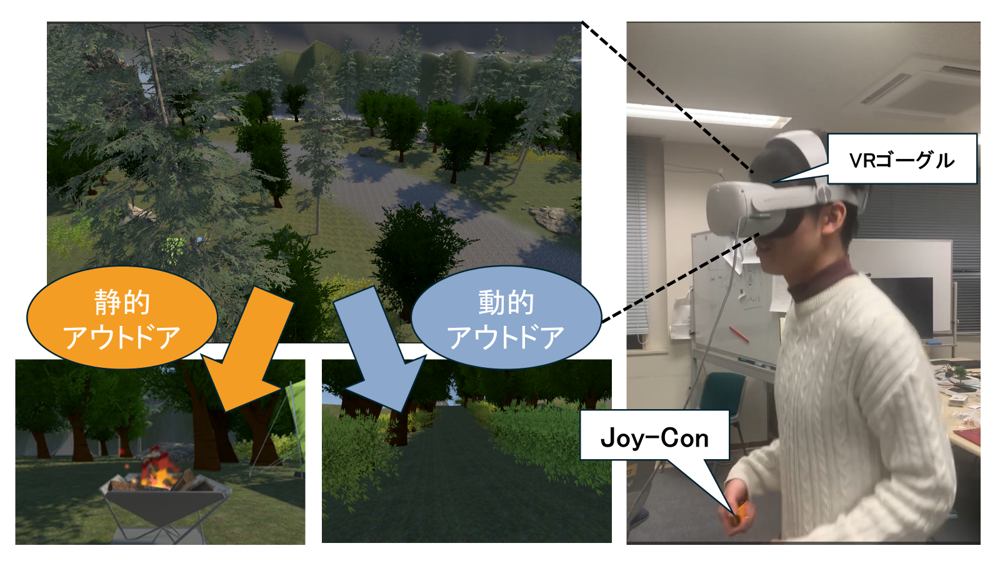
- ぶいロス:静的活動や動的活動によるVR自然体験システムのリフレッシュ効果の検討
〇吉田 瑞生(大阪工業大学)、國友 竜暉(大阪工業大学)、大井 翔(大阪工業大学) - 現在,ストレスを抱えた人間は増加しており,日常生活への影響もある.ストレスの発散には運動(動的アクティビティ)や自然に触れる行為(静的アクティビティ)が効果的だが,コロナ禍を経て外出時間が減り自宅で過ごす時間が多い現状もある.そこで本研究では,在宅でも気軽に静的かつ動的にアクティビティができるVR Outdoor-Refresh-System(通称:ぶいロス)を開発し,その効果について検証を行う.
- 1B1-05
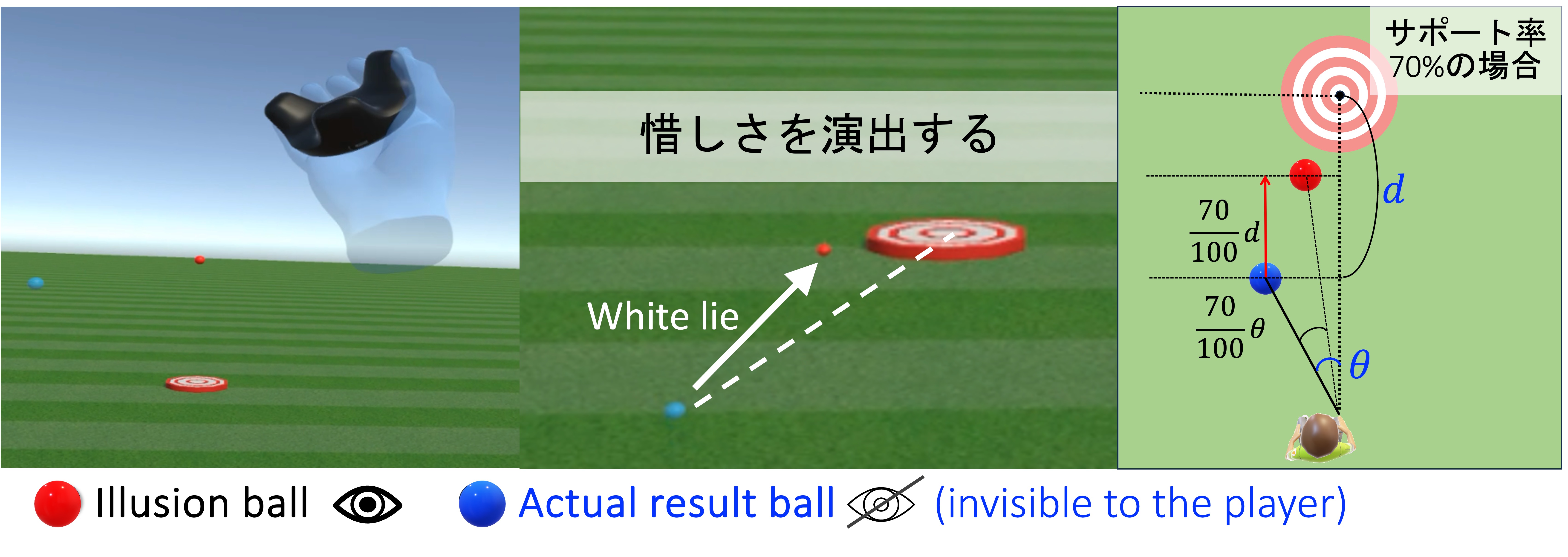
- VR投球におけるWhite Lieがパフォーマンスに表す影響の検討
〇村上 遥(玉川大学)、稲邑 哲也(玉川大学) - VR上では「実際よりも出来ているように見せる」White Lieが実装できる。しかし、これにより運動感覚が阻害され、White Lieを無くした後にパフォーマンスが落ちてしまう可能性が懸念される。本稿ではVRにおける嘘が何かを定義するとともに、VR上におけるWhite Lieがパフォーマンスに与える影響をVR投球を例として被験者実験にて検証する。
- 1B1-06
- 縫い目まで解像する野球ボールの空力解析とMRデバイスによる軌道再現
〇北川 翔(東京工業大学 工学院)、青木 尊之(東京工業大学 学術国際情報センター)、尹 昱炜(東京工業大学 工学院)、渡辺 勢也(九州大学 応用力学研究所) - GPUスパコンを使い、縫い目が回転しながら飛翔する野球ボールの空力解析を行い、さまざまな変化球のボール軌道をスパコンの中で再現する。さらにMRデバイスによって実際の球場や練習場の環境下で、投手から投げられた仮想のボールを打者視点やキャッチャー視点で体験することにより、野球のトレーニングへの活用を試みる。

- 1B1-07
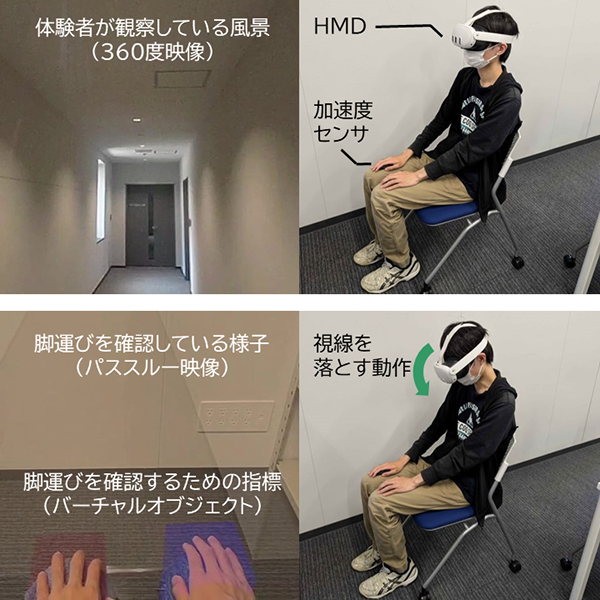
- 高齢者の歩行訓練のための脚運びを確認可能な着座式VR歩行アプリの実装
〇西野 僚馬(京都橘大学)、横山 茂樹(京都橘大学)、吉田 俊介(京都橘大学) - 高齢者の歩行訓練の課題として、立位では転倒の危険があり、座位では正しい脚運びを習熟しにくいことがある。本研究で提案するVRアプリは、360度映像による室内を座位で安全に歩行訓練できるものである。視線を足元に落とすとパススルー映像にて実際の脚運びが重畳され、加速度センサによる足踏み動作の検出と、手を膝に置くハンドトラッキングを流用した簡便な脚の動きの測定にて、指標となる脚運びからのズレが提示できる。
- 1B1-08
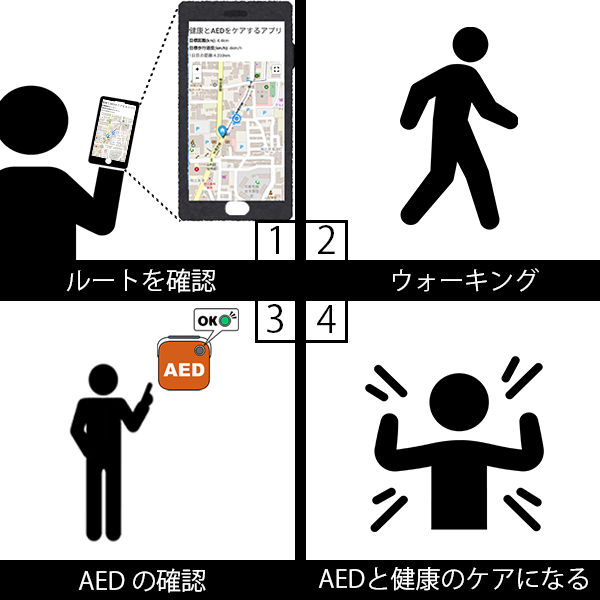
- 生活習慣病予防に効果的な散歩経路の提示によって健康とAEDを共にケアするアプリ
〇小向 脩平(京都橘大学)、関根 和弘(京都橘大学)、吉田 俊介(京都橘大学) - 一般市民へのAED利用促進に向けた課題に、定期的なAEDの存在確認と正常動作確認がある。本研究では、居住地周辺のAEDの管理に、自身の健康管理を組み合わせ、生活習慣病予防のためのウォーキングとしてAEDを巡回する手法を提案する。ルート作成においては、一定期間内で近隣のAEDを網羅し、一日当たりの歩行量が平均化するような制約を用いることで、健康維持に最適なものとなるよう期間内の運動量を調整する。
- 1B1-09
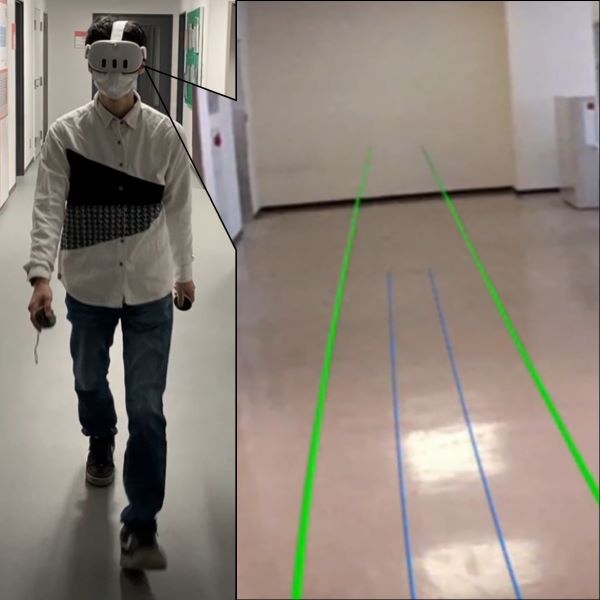
- XR環境における歩行と姿勢のセルフトレーニングのための運動介入プログラム開発
〇寺島 広樹(静岡大学)、神田 洸士(静岡大学)、水野 拓宏(アルファコード)、藤田 憲一郎(けんごろう鍼灸整骨院)、石川 翔吾(静岡大学)、桐山 伸也(静岡大学) - 本研究では健康増進を目的に個人に合わせて調整され,歩行と姿勢のセルフトレーニングが可能なXR環境における運動介入プログラムを開発し,17名の被験者に実践させた.トレーニング前後の歩行映像を専門家に評価してもらい,全被験者の歩行改善が確認できた.専門家の評価はXR体験時の情報提示制御に有益な示唆をもたらし,専門家のコメントから被験者の身体的特徴によって改善効果に差が見られるなど新しい知見を得た.
- 1B1-10
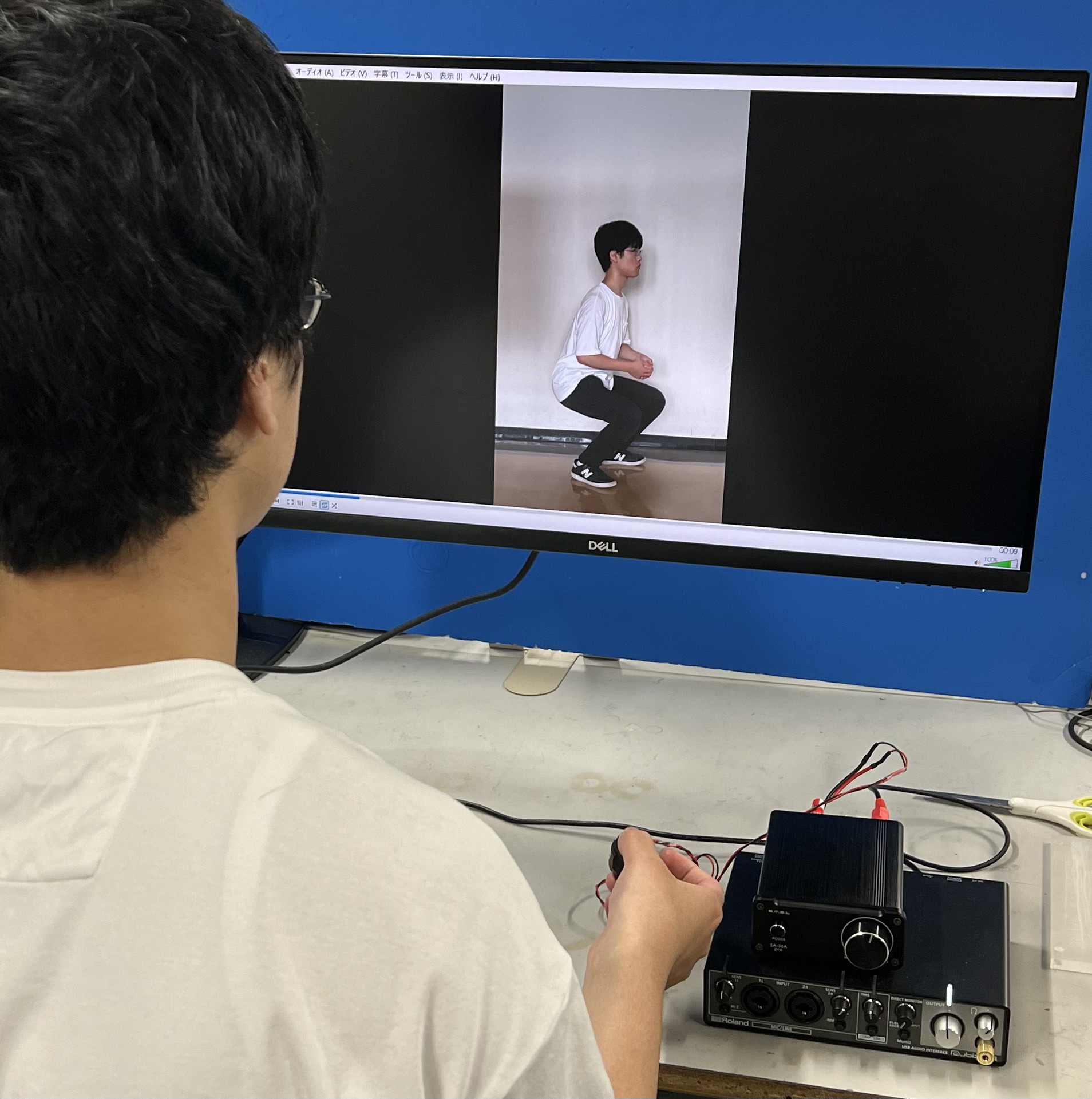
- 映像に基づく運動体感の自動生成に関する研究 第3報:逆動力学による力推定に基づく体感振動の提示
〇赤井 崚真(東北大学)、昆陽 雅司(東北大学)、田所 諭(東北大学) - 本稿では映像内の人物の動作により生じる力に基づいて振動刺激を自動生成し,力に応じて生成した振動刺激が運動体感に一致するかを確かめる.姿勢推定ライブラリを用いて人物の骨格を追い,逆動力学を用いて関節に生じる力を推定する.力を知覚インテンシティに対応付け,振動刺激を生成する.被験者実験で他の変数に基づいて生成した振動刺激と比較し,提案手法の有効性を検証する.
- 1B1-11
- LiDARスキャナを活用したソフトボールグラウンド設営支援システムの開発
〇坂口 正道(名古屋工業大学)、角谷 悠真(名古屋工業大学)
口頭発表09:30-10:10 、ポスター発表10:55-11:40
医療・脳
- 1C1-01
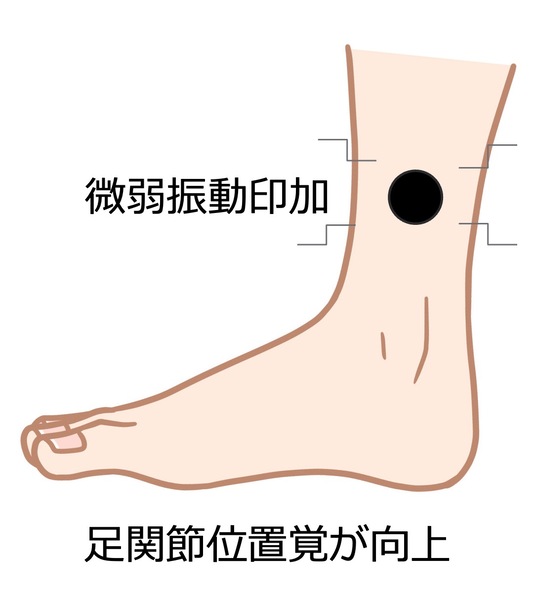
- 下腿部への微弱振動印加が足関節位置覚に与える影響
〇羽原 将貴(筑波大学)、橋本 悠希(筑波大学) - 高齢者の転倒要因にバランス能力の低下が挙げられる.歩行時のバランス制御には足関節位置覚が影響する.体性感覚系では機械受容器に閾値以下の微弱振動を印加することで感度を向上できる. 本研究では,転倒の危険因子である関節位置覚の向上を目的とし下腿部に微弱振動を提示することで足関節の調節能力を向上させる手法を提案する.本稿では,下腿部への微弱振動印加による位置覚への影響を検証し,その結果を報告する.
- 1C1-02
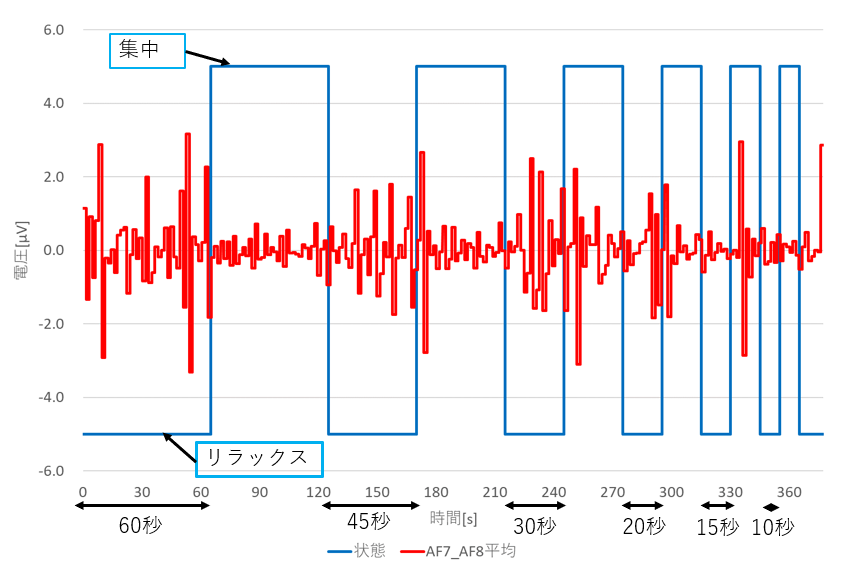
- 2電極の脳波による集中とリラックスの最小判定可能時間の分析
〇兒嶋 達矢(東京工科大学大学院)、高橋 秀智(東京工科大学大学院) - 近年、脳波インターフェースについて研究が進められている。本研究では2状態の脳波のパターンによる複数操作を行える、実用化が容易なシステム構築を目的として、そのために電極数の少ない汎用的な脳波計による、集中とリラックスの最小判定可能時間の調査を行った。集中とリラックスは脳波解析の最も基本的なものであることから、それらを用いて行った。実験では集中時とリラックス時の脳波を継続時間別で測定し、解析を行った。
- 1C1-03
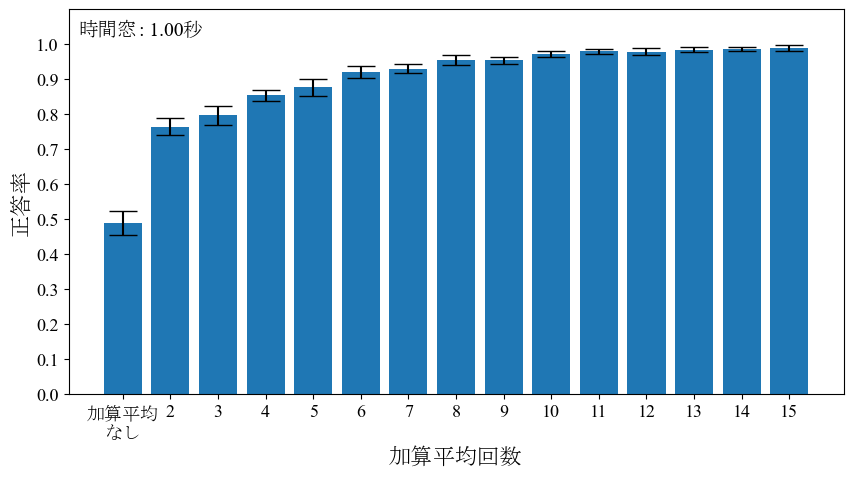
- 集団加算平均解析による耳周辺SSVEPの分類
〇伊藤 月雲(富山県立大学大学院 工学研究科)、崔 高超(富山県立大学 情報工学部)、唐山 英明(富山県立大学大学院 工学研究科) - 定常状態視覚誘発電位(SSVEP)は一般に訓練なしで観測できるため、ブレイン・コンピュータ・インタフェース(BCI)の研究で広く利用されている。近年、耳周辺からの脳波計測が注目されているが、耳周辺はSSVEPが強く現れる後頭部から離れているため、検出能が低下すると考えられる。本研究では、SSVEPの検出能を高めるため、集団加算平均解析を行い、機械学習による分類精度で優れた結果を得た。本手法は協力型BCIで有用であると考えられる。
- 1C1-04
- VR技術を利用した社交不安症の客観的診断・評価方法の開発
〇小畑 洋平(順天堂大学医学部精神医学講座)、伊藤 賢伸(順天堂大学医学部精神医学講座)、久保山 正浩(順天堂大学大学院医学研究科メディカル・メタバース共同研究講座、日本アイ・ビー・エム株式会社)、王 元(順天堂大学大学院医学研究科メディカル・メタバース共同研究講座、日本アイ・ビー・エム株式会社)、藤林 和俊(順天堂大学医学部革新的医療技術開発研究センター)、戸田 愛子(順天堂大学医学部精神医学講座)、廣政 朋子(順天堂大学医学部革新的医療技術開発研究センター)、遠藤 裕史(順天堂大学医学部革新的医療技術開発研究センター)、平 大樹(順天堂大学医学部精神医学講座)、小林 智久(順天堂大学大学院医学研究科メディカル・メタバース共同研究講座、日本アイ・ビー・エム株式会社)、太田 進(順天堂大学大学院医学研究科メディカル・メタバース共同研究講座、日本アイ・ビー・エム株式会社)、加藤 忠史(順天堂大学医学部精神医学講座) - 社交不安症は、うつ病やアルコール依存症を合併しやすく、重大な社会的支障をきたすにもかかわらず、適切に診断される機会が少ない。診断のためには、社交場面における著しい不安反応を確認する必要があるが、医療面接という特殊な状況下の問診のみでは評価に限界があり、日常の社交場面における生理学的測定を用いた客観的診断方法を確立することが望ましい。本研究では、社交不安症患者にVRによる社会ストレス負荷を行い、眼球運動、発声、心拍数、唾液コルチゾールなどの反応を測定して、健常群と比較する。本研究の成果は、社交不安症の客観的診断を可能にし、未治療の潜在的社交不安症患者群の治療機会拡大への道を切り開く。

- 1C1-05
- 五十肩の遠隔VRリハビリテーションにおける異種互恵ケアの効果
〇太田 貴士(東京大学大学院)、中村 拓人(東京大学大学院)、葛岡 英明(東京大学大学院) - 五十肩の遠隔VRリハビリテーション(リハビリ)において,他者と一緒に同じリハビリを行う「同種互恵ケア」がリハビリの継続を促すことが確認されている.しかし,リハビリ現場において同一のリハビリプログラムを実施する他者が常に存在するとは限らない.本研究では,互恵ケアの応用の幅を広げるために,異なるリハビリ動作を行う他者と一緒にリハビリを行う「異種互恵ケア」を提案し,40歳以上の実験参加者24名を対象に異種互恵ケアの有効性を検証した.
- 1C1-06
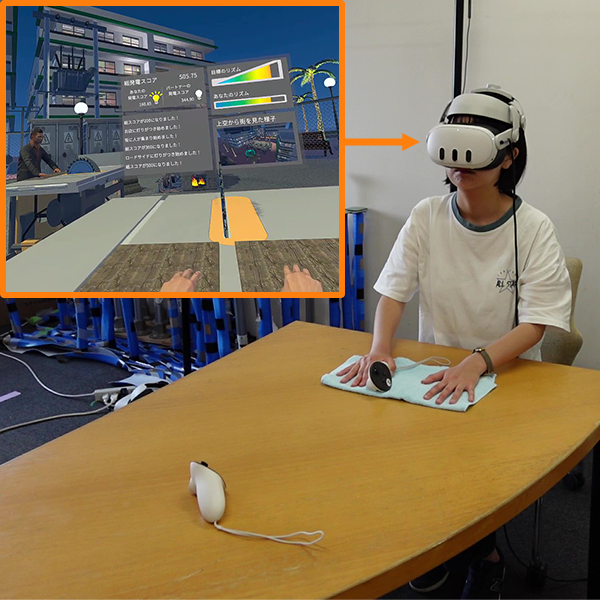
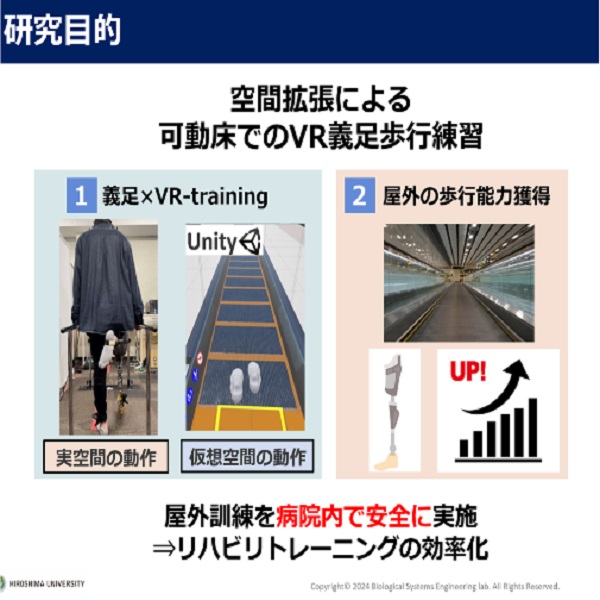
- 空間拡張による可動床でのVR義足歩行トレーニング
〇中川 康太(広島大学大学院 先進理工系科学研究科)、栗田 雄一(広島大学大学院 先進理工系科学研究科)、前田 慶明(広島大学大学院 医系科学研究科)、田城 翼(広島大学大学院 医系科学研究科)、有馬 知志(広島大学大学院 医系科学研究科)、田村 佑樹(広島大学大学院 医系科学研究科)、長尾 拓海(広島大学大学院 医系科学研究科) - 義足装着者にとって危険な環境として「動く歩道」が挙げられる。これは義足装着者にとって,動く床の外的なスピードに合わせて、着地することが困難なためである。一方で実機を用いた訓練は転倒リスクも大きく危険である。そこで我々は、VRを用いた屋外環境のトレーニングシステムが有用であると考えた。本研究では義足のVRシステムの構築を目的とし、模擬義足を用いた健常者実験を通して、本手法の有効性を確認する。
- 1C1-07
- 医療的ケア児のストレス軽減効果と社会的交流を促すリアルタイム2面投影の展開
〇荻原 弘幸(群馬大学)、岡田 恵里佳(群馬大学)、奥 寛雅(群馬大学) - 医療的ケア児とその家族は,日常生活に様々なストレスを抱え,社会的交流が少ない現状にある.本研究は,映像投影に基づく没入感の高い演出で医療的ケア児のストレスを軽減させるツール開発と社会的交流を促すためのコミュニティ支援ツールの実装を目的とする.今回,医療的ケア児を対象に,KOKOROスケールを用いたリアルタイム2面投影の視聴前後でストレス軽減効果を比較検証し,定性的評価から得られた結果を報告する.

- 1C1-08
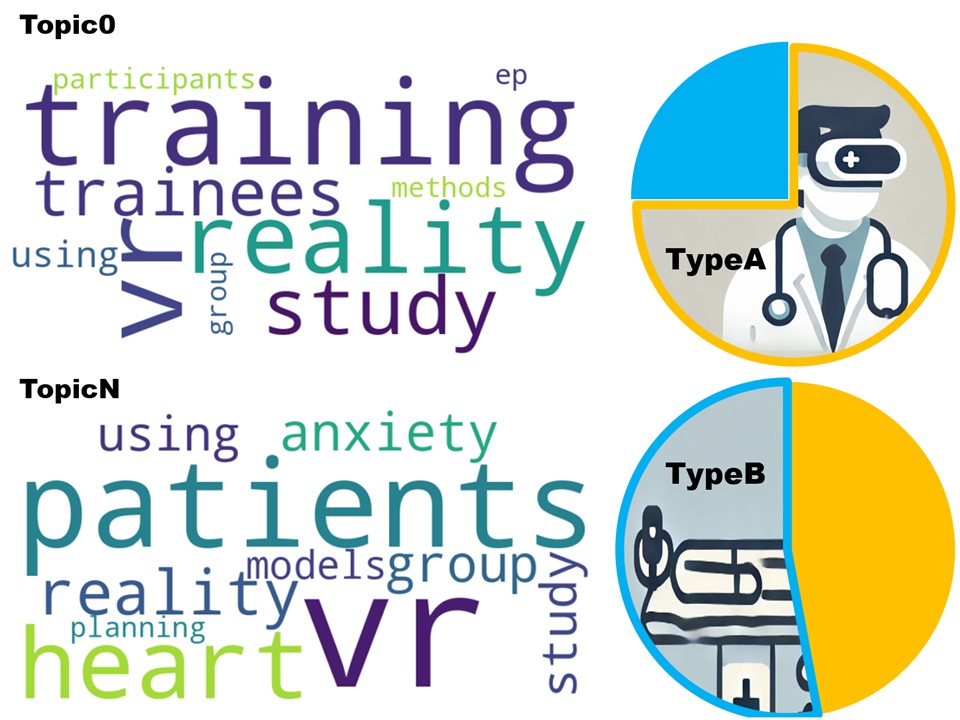
- Updated Bibliometric Analysis on the Virtual Reality Usage in the Cardiovascular Research in 2023
〇宮部 亮(愛媛大学医学部循環器・呼吸器・腎高血圧内科学講座、国立病院機構 愛媛医療センター)、檜垣 彰典(愛媛大学医学部循環器・呼吸器・腎高血圧内科学講座)、山口 修(愛媛大学医学部循環器・呼吸器・腎高血圧内科学講座) - 心血管病領域におけるVRの使用方法は,医療従事者(医師など)がVRデバイスを使用するTypeAと,患者がVRデバイスを使用するTypeBの2者に分類される.この定義を用いて我々は2023年に出版された医学論文を分類し,その特徴を解析した.条件を満たした全43報のうちTypeAは27報(62.7%),TypeBは14報(32.5%)で,いずれにも分類不能な文献が2報(4.7%)であった.さらに文献の要旨に対してキーフレーズ抽出を行ったところTypeAではtrainning,planning,TypeBではanxiety,educationなどのフレーズが抽出された.
- 1C1-09
- 臓器の剥離操作練習のための紐状弾性体と柔軟シートによる触力覚提示
〇和田 佳久(筑波大学)、伊藤 香(帝京大学医学部外科学講座)、矢野 博明(筑波大学) - 腹部外傷外科における開腹手術では,腸管や周辺組織の層を剥離し,目標とする臓器や血管を露出させる。このとき,医師は視覚情報がほとんどない状況で手指から得られる触力覚情報を頼りに剥離操作を行うが,適切な剥離箇所に入った場合は抵抗が少ない一方で,誤った剥離箇所に入った場合は尿管などに干渉して手応えが変化する。本稿では,紐状弾性体と柔軟シートを組み合わせ,誤った剥離箇所に入った場合に干渉に気付いて立ち戻る練習を行うためのシステムのプロトタイプについて報告する。
- 1C1-10
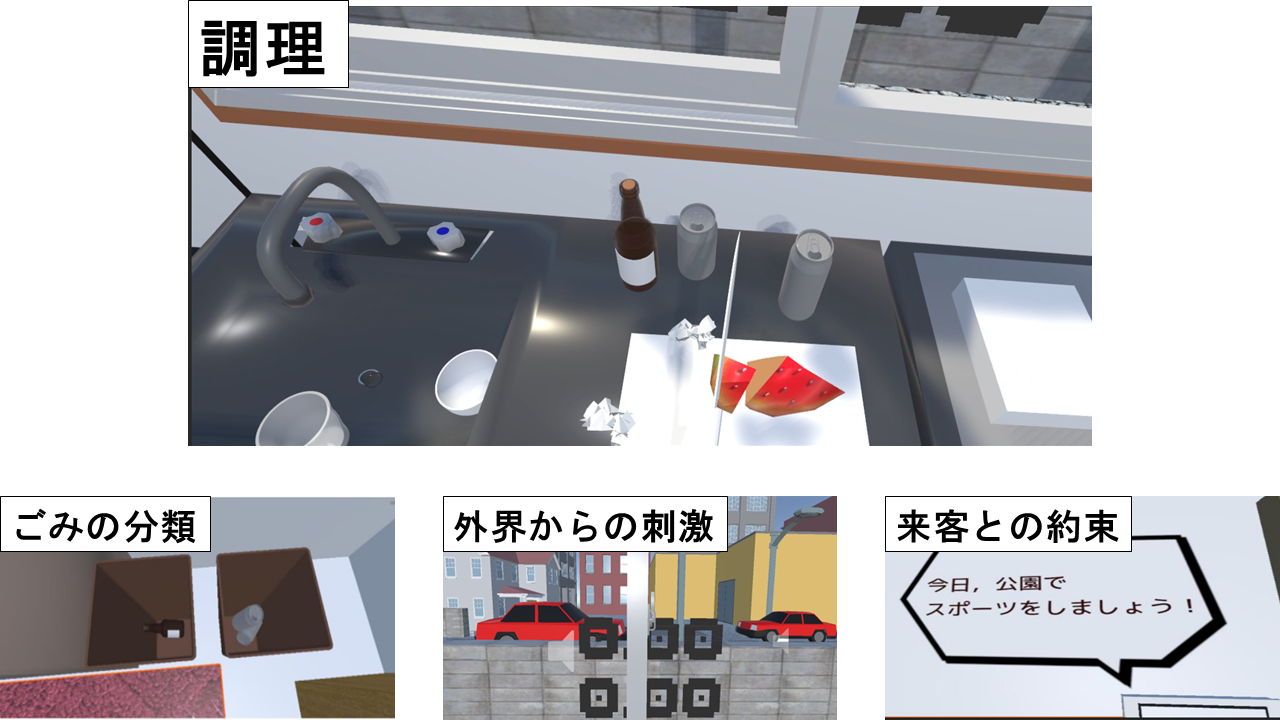
- V-CARE:日常生活行動を基にしたVR認知リハビリテーションシステムの検討
〇神田 直輝(大阪工業大学)、岩崎 寛太(大阪工業大学)、遠藤 飛鳥(大阪工業大学)、大井 翔(大阪工業大学) - 高次脳機能障害へのリハビリテーションでは,トランプなどを使った机上作業訓練や反復訓練などが存在する.しかし,それらの多くは日常生活行動に伴わないため,評価結果と実生活において差異が生じる.我々はこれまでに,VR空間内で生活行動に基づいた認知リハビリテーションシステムを開発している.本研究では,これまでのシステムに加えて注意機能の訓練を目的に調理に着目したシステムを開発し,検証を行った.
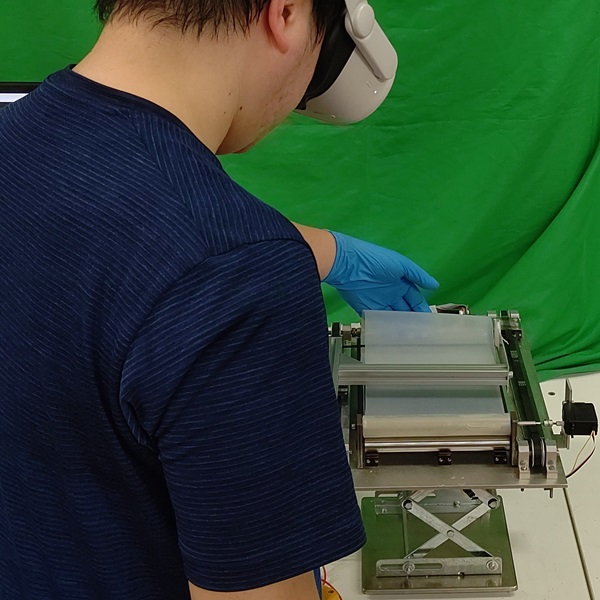
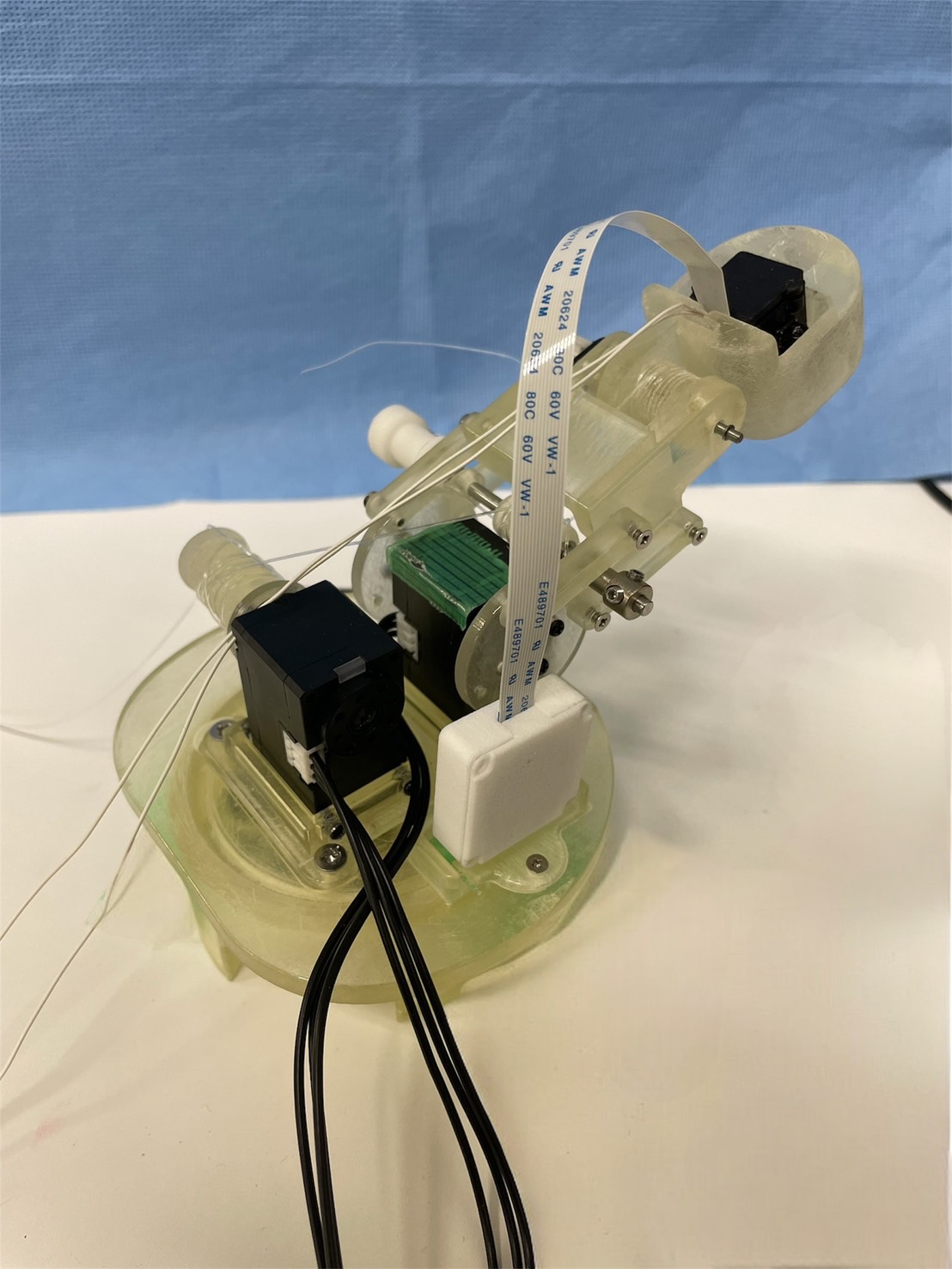
- 1C1-11
- 皮膚科における視診・触診の再現のための3自由度ロボットフィンガーの提案
〇今 美咲(早稲田大学)、加藤 史洋(早稲田大学)、竹田 隼(早稲田大学) - 著者らは視触診を遠隔診療で実現するためのロボットハンドの開発をめざし,触診における医師の動きを再現するロボットフィンガー提案する.本ロボットは3自由度で構成され,IP関節をワイヤー駆動で制御する.視診と触診が同時に可能とするよう小型カメラを指先に組み込み,画像と触覚情報を同時に取得可能とする.本論文では、接触部の画像と接触力を取得可能となったので報告する.
- 1C1-12
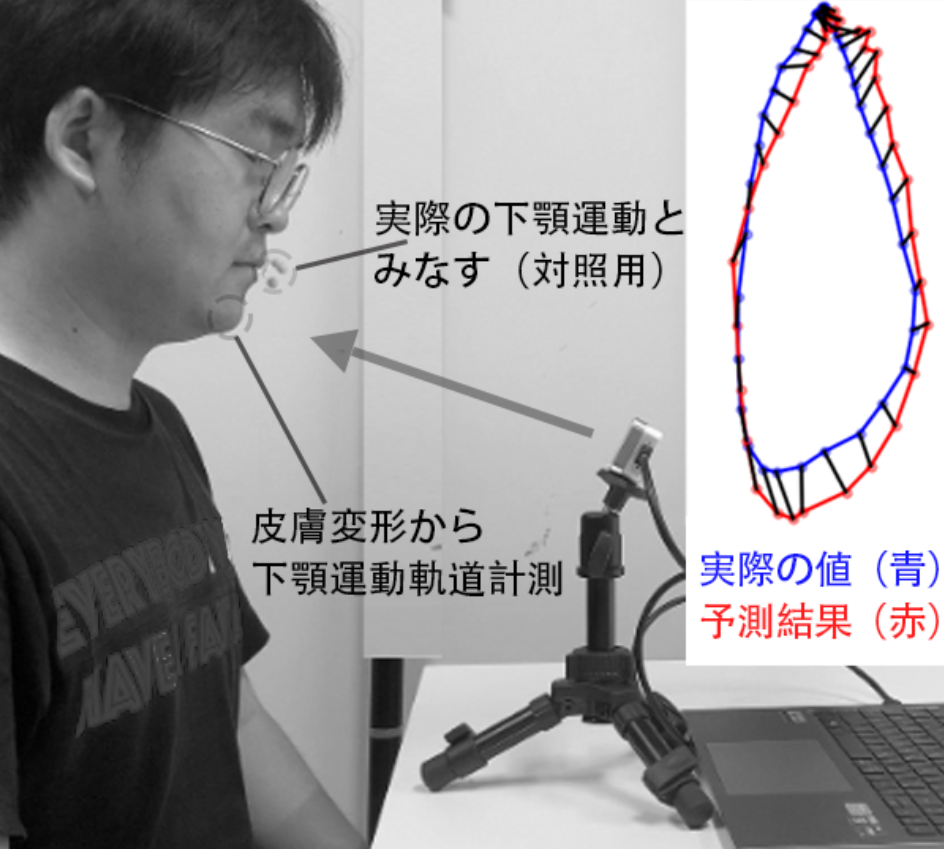
- 単一深度カメラを用いた下顎軌道計測システムの提案
〇賈 志豪(電気通信大学)、櫻井 翔(電気通信大学)、広田 光一(電気通信大学)、野嶋 琢也(電気通信大学) - 口腔機能異常の早期発見のための手法の一つに,咀嚼中の下顎軌道の評価がある.咀嚼時の下顎軌道の形状を評価することで,口腔機能の異常の有無を簡易的に判断するものである.しかし,この方法では通常,マーカや計測装置を患者の体に取り付ける必要があり,患者,医療者双方に負担が大きい.そこで本研究では,単一の深度カメラのみによる,低負担での下顎運動計測システムを構築する.試作システムの簡易評価では,およそ1.1mm程度の誤差で下顎軌道を計測可能であることを確認した.
口頭発表09:30-10:10 、ポスター発表10:55-11:40
感覚・知覚1
- 1D1-01
- VR野球における高速投球の知覚補助
〇正木 智也(東海大学)、加藤 義春(東海大学)、水谷 賢史(東海大学)
- 1D1-02
- 風のクロスモーダル現象による浮遊感の創出
〇李 淵(慶應義塾大学、東京大学)、胡 佳儀(東京大学)、金 杜(東京大学)、細井 十楽(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学)、高汐 一紀(慶應義塾大学) - In this study, we developed a wind-based system that provides airflow to the soles of the user's feet while their sole is touching the ground. We aim to simplify the equipment to realize the floating sensation.

- 1D1-03
- 順応を用いたVRシミュレ-タ酔いの低減効果は異なる走行映像に汎化するのか?
〇人見 利玖(静岡大学)、加瀬川 智皓(静岡大学)、山脇 ユミ(静岡大学)、宮崎 真(静岡大学) - 1時間の休憩を挟んでVRシミュレータを2回体験すると,2回目のVR酔いが低減する.本研究は,この順応による酔いの低減が異なる走行映像にも汎化するのかを検証した.今回,走行映像として左右蛇行と上下昇降を用いた.その結果,1回目と2回目で異なる走行映像を体験した群では,酔いの低減が生じなかった.すなわち,順応による酔いの低減効果は,上下/左右という異なる方向への動きの映像の間では汎化しなかった.

- 1D1-04
- 群で動く実体物が人間に与える深奥質感の感性研究(第二報)
〇香川 舞衣(東京大学)、樋口 夢乃(慶應義塾大学)、永島 徹也(慶應義塾大学)、仲谷 正史(慶應義塾大学)、筧 康明(東京大学) - 実体物を多数集めた群の動きや振る舞い,見た目などの特性を活かした表現に注目が集まっている.これらの実物体群の制御によって生み出された質感が、人間にどのような認知・インタラクションの変容をもたらすかを評価するための項目はこれまでに十分に検討されていない.本研究では,これらの実体群の評価フレームワークを提案するとともに、実体物を用いた作品における新たな表現領域の開拓支援を目指す.
- 1D1-05
- 仰臥位でのVR体験における身体不一致感に関する基礎検証
〇横井 紀卓(名城大学)、森嶋 理沙(名城大学)、矢本 雄大(名城大学)、目黒 淳一(名城大学) - 近年,VR技術の発展に伴い立位や端坐位など様々な姿勢でのVR体験の開発が進んでいる.同様に長時間のVR体験が可能な仰臥位でのVR体験の開発が期待されているが,仰臥位でのVR体験には現実空間とVR空間での視線方向の違いによる身体不一致によりVR酔いが発生しやすいという課題がある. そこで本研究では,ピッチ角方向の姿勢変化が可能な装置を用いて仰臥位でのVR体験における身体不一致感を減少させる手法の検討を行う.

- 1D1-06
- 把持可能範囲において人間がバーチャルリアリティ空間で知覚する距離の変化の研究
〇鳥海 青真(成蹊大学)、久保 友八(成蹊大学)、小方 博之(成蹊大学)、伝保 昭彦(成蹊大学)、亀谷 恭子(成蹊大学)、安田 晶子(一橋大学) - VR空間では、自己から対象物までの距離が実際より近く感じられる「距離感の圧縮」現象が発生することがある。この原因の一つとして、HMDにより視野が制限されることが考えられている。これまで、自己から中・遠距離での「距離感の圧縮」は検討されてきたが、近距離範囲においては十分に検討されていない。本研究では対象物を把持可能な近距離において、HMD内での視野の広さが「距離感の圧縮」に与える影響を検討した。
- 1D1-07
- 上腕への圧迫力の変調提示による知覚への影響
〇山口 昂太(熊本大学)、嵯峨 智(熊本大学) - 力覚情報,特に重さ情報はバーチャルな環境での物体の存在感や没入感を高める役割を担う重要な情報である.本研究では,環境に左右されずに使用でき,目的以外の力を提示することがなく,重さの知覚を変化させる力覚提示装置を目指した。そこで,上腕を圧迫し、更に腕の動きに合わせて圧迫力を変調させることで,重さや他の知覚に対してどのような変化を及ぼすのかについて調査し,その結果を報告する.

- 1D1-08
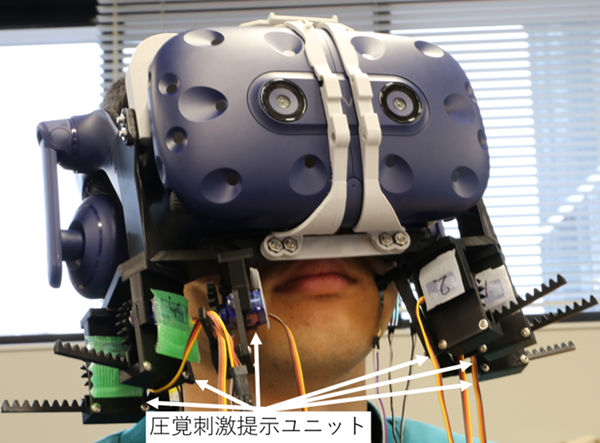
- 頬部圧覚刺激の提示位置による知覚差異の実験的検討
〇木村 竜(立命館大学大学院)、中村 文彦(立命館大学大学院)、木村 朝子(立命館大学大学院)、柴田 史久(立命館大学大学院) - バーチャル環境において,頬を用いたインタラクションが模索されている.しかし,頬の面積は広いため,位置によって知覚が異なる可能性がある.そこで,本研究では,頬の位置によって圧覚刺激に対する感度が異なるのか検証する.我々は頭部装着型ディスプレイに対して圧覚刺激提示ユニットを左右3か所ずつに取り付けた装置を開発した.開発した装置を用いて頬部6か所に圧覚刺激を提示する実験を行い,力を知覚する閾値と不快に感じる閾値を評価した.
- 1D1-09
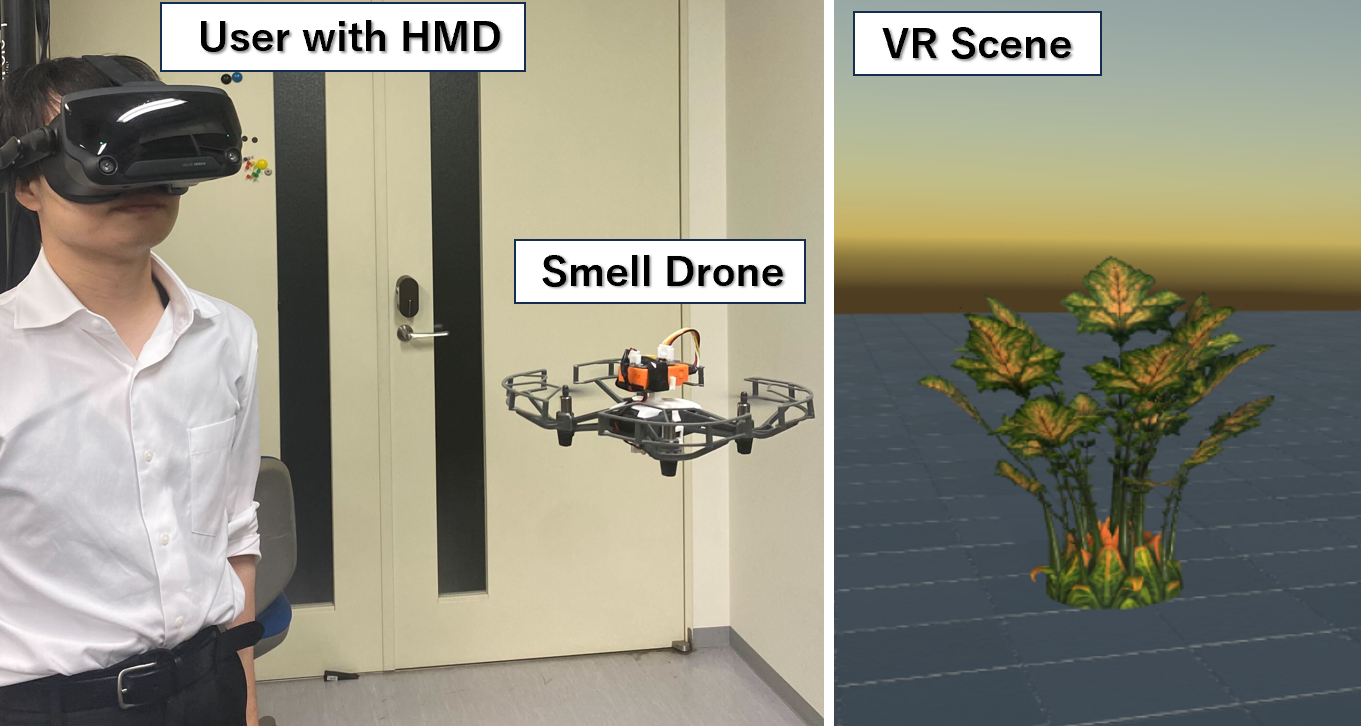
- VR環境との同期のため嗅覚ドローンの飛行経路に関する探索的研究
〇鵜木 亮成(埼玉大学)、プンポンサノン パリンヤ(埼玉大学) - VR環境において嗅覚刺激を与えることは,シーンの臨場感を向上させるために有望な手段の一つである.我々は,ドローンを用いて嗅覚刺激の自由度を拡張する手法を提案した.そのためには,嗅覚ドローンをVR環境内の場所に対応した現実の場所に設置する必要がある.本研究では,ユーザとドローンの距離とドローンの飛行経路を推定することで,ユーザとドローンの衝突を防止する手法を開発する.また,提案手法の精度を評価するために予備実験を行う.
- 1D1-10
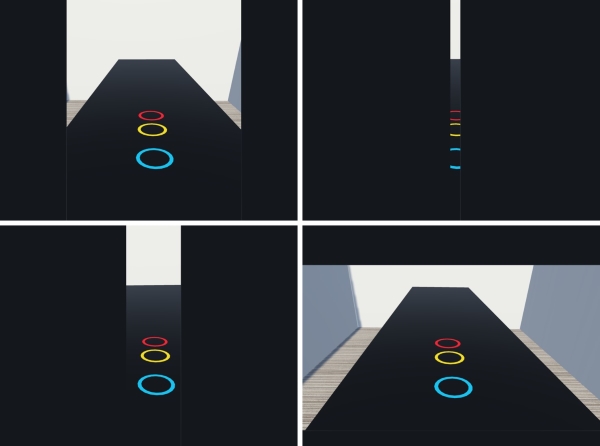
- MR環境下における仮想物体とのインタラクションがベクション効果に与える影響の分析
〇山田 直樹(立命館大学大学院)、中村 仁一朗(立命館大学大学院)、橋口 哲志(立命館大学大学院)、松室 美紀(立命館大学大学院)、柴田 史久(立命館大学大学院)、木村 朝子(立命館大学大学院) - ベクションは,一様に運動する視覚刺激を観察することで,視覚刺激とは逆方向に自身の運動を知覚する現象である.これまで様々なベクションの分析が多く行われてきたが,MRにおける検討は多くない.そこで,本稿では体験者自身の身体で仮想物体と直接的なインタラクションが可能であるといったMRの特徴を踏まえ,現実空間に線状刺激と仮想物体を提示し,仮想物体に触れる際に知覚するベクション効果に与える影響を分析した.
- 1D1-11
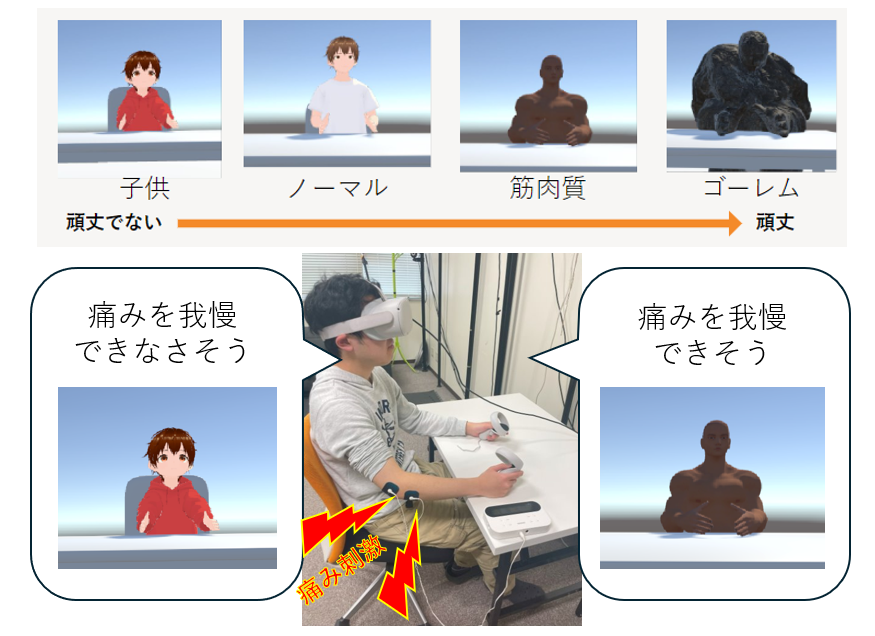
- VRアバタの見た目の頑丈さが痛み知覚の変化要因に及ぼす影響の基礎調査
〇山口 留依(電気通信大学)、櫻井 翔(電気通信大学)、野嶋 琢也(電気通信大学)、広田 光一(電気通信大学) - アバタの見た目の筋肉量からユーザの痛みの知覚が変化するとの知見がある.一方,痛みの知覚は痛みへの不安や嫌悪感等の心理的影響も受ける.本研究では,アバタの見た目の頑丈さによって,痛みの知覚だけでなく,痛みへの不安や嫌悪感に関わると考えられる痛みへの耐性や我慢強さも変化するかを検証した.実験を通じ,アバタの見た目の頑丈さによる痛みの知覚に変化はなかったが,痛みへの耐性や我慢強さが変化することを示した.
- 1D1-12
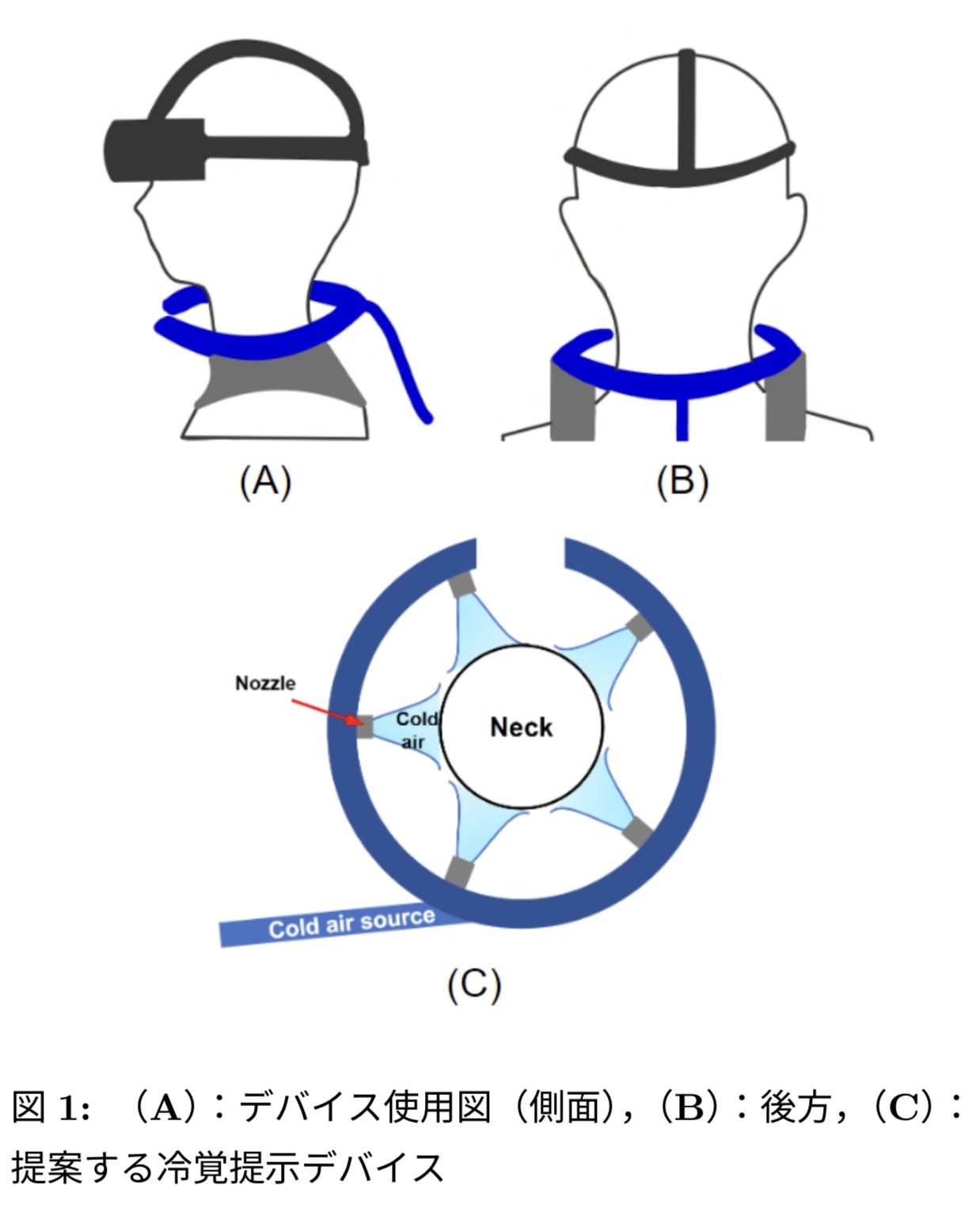
- コアンダ効果を利用した局所冷刺激による一体感提示
〇秋元 快成(筑波大学)、許 佳禕(東京大学)、金子 暁子(筑波大学)、家永 直人(筑波大学)、黒田 嘉宏(筑波大学) - 本研究では,効率的に冷刺激を提示し,没入感の高い体験を提供可能なデバイス開発を目標とする.曲面に衝突した噴流が回り込むように進むことを利用し,皮膚に対する局所刺激を一体とした刺激と知覚させることで,より効率的なデバイス設計を行う.本発表では,一体とした刺激と知覚する要因について温度変化率と圧力に着目し、温度計測とシミュレーションを基に,これらがどのように一体感に寄与するか調査した結果を報告する。
口頭発表09:30-10:10 、ポスター発表10:55-11:40
ウェアラブル
- 1E1-01
- 多様な姿勢に対応したワイヤレス足裏振動デバイスによるバーチャル歩行体験
〇中村 純也(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - 本発表では、バーチャル歩行体験を実現するワイヤレス足裏振動デバイスを開発した。このデバイスは、振動子と圧力センサによるバーチャル歩行の制御とフィードバックを提供する。前足部と踵部の振動子は、歩行に同期して足裏への振動を提示し、歩行する地面質感に応じた振動を提示する。6つの圧力センサは、足裏の荷重変化を捉え、歩行方向を制御する。ユーザーは立位や座位、仰向け姿勢など身体的制約に左右されず体験できる。

- 1E1-02
- 入出力装置一体型ハンドヘルドXRデバイスのフォームファクタに関する考察
〇小西 遥登(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - 本研究では、HMDの棒状の把持部を取り付け、その下端に入力部を結合した一体型ハンドヘルドXRデバイスを提案する。ユーザは一方の手でデバイスの把持部を把持して自らの頭部に固定し、もう一方の手を入力部に載せる。本デバイスでは、ユーザが入力部に手を置く際に、ユーザの手が把持部に干渉することが問題となる。本発表では、提案システムのモックアップを作成し、提案システムのフォームファクタについての知見を示す。

- 1E1-03
- 胸部装着型XRデバイスにおける腹部平面上のタッチ操作と仮想空間との座標対応に関する考察
〇山内 耀斗(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - 本研究では、歩行や巡回を伴う作業現場でのXR業務を想定した、仮想空間の没入と離脱がヘッドバンドレスで容易な胸部装着型のXRデバイスの構成法を提案する。実工具の把持を想定しているため仮想空間を操作するハンドコントローラは利用できない。そのため、ユーザの腹部付近にタッチパッドを垂直に備える。骨格構造に基づいた直感的なタッチ操作を提供するため、垂直面上のタッチ操作とカーソル移動の座標対応に関する知見を示す。

- 1E1-04
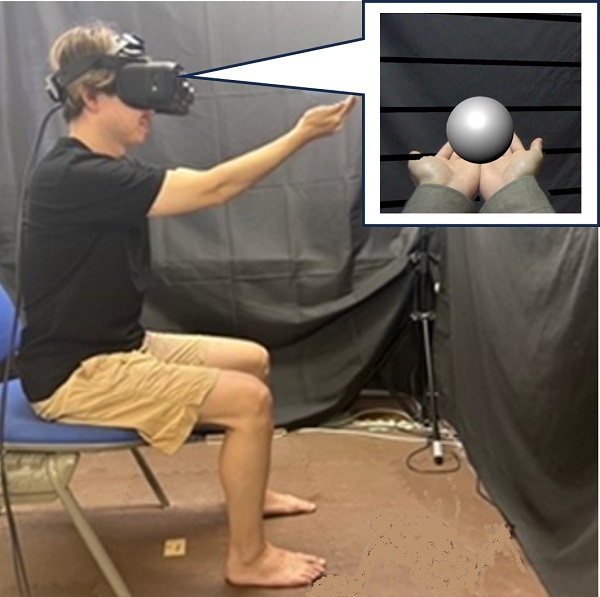
- 手首装着型拡張手投影における深度センサを用いた遠隔接触感覚
〇竹内 悠人(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - 我々はMEMSミラーを用いた手首装着型のレーザ走査プロジェクタによる拡張手投影システムを提案している.従来システムでは拡張手の投影のみしか行えず,投影による情報の取得が実現されていない.そこで,投影した拡張手の深度情報を深度センサで計測することで,投影位置の凹凸情報を遠隔に取得しユーザにフィードバックし感覚追加を行うシステム構成を提案する.これにより装着型実装における遠隔接触感覚の知見を示す.
- 1E1-05
- Tape-ticsを用いた新たな触覚ツールキットの開発と応用
〇パニアグア カルロス(奈良先端科学技術大学院大学)、太田 裕紀(奈良先端科学技術大学院大学)、平尾 悠太朗(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - 「Tape-tics」は、柔軟なフレキシブル基板に小型振動子を配列したテープ型デバイスである。任意の長さに切り取り、任意の場所に貼り付けることができ、特定の部位に合わせた設計や複雑な配線が不要である。開発したGUIコントローラを用いて、任意の触覚表現をプログラムすることが可能。さらに、マイクロコントローラに様々なセンサーを組み合わせることで、多様な用途に対応できる。本論文では、このTape-ticsを用いたさまざまな応用例を紹介する。

- 1E1-06
- Motion-Less VRの研究:五指・多自由度運動の実現に向けた基礎開発
〇望月 典樹(日本工業大学) - Motion-Less VRは、実身体の運動を必要としないVRシステムである。このシステムでは、固定された実身体の関節トルクを計測し、動力学に基づいてバーチャル身体の運動を生成し、その結果を感覚器にフィードバックする。これにより、実環境による空間的・物理的な制約を受けずにバーチャル身体の操作が可能となる。本研究では、五指の屈曲・伸展および内転・外転運動を可能とするシステムの開発を行う。
- 1E1-07
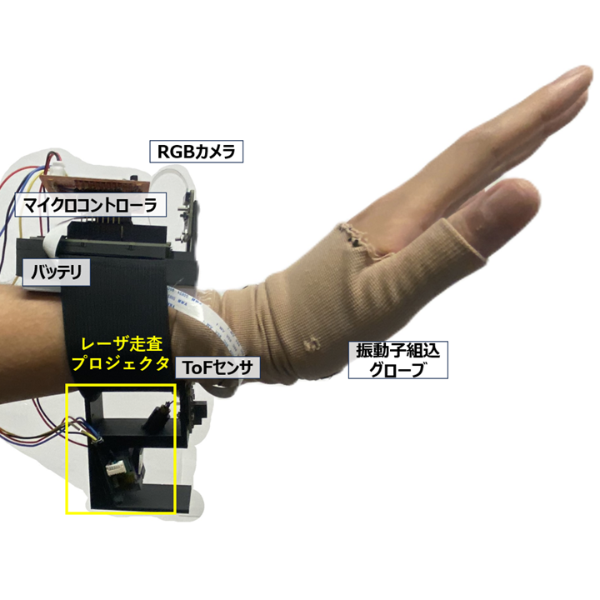
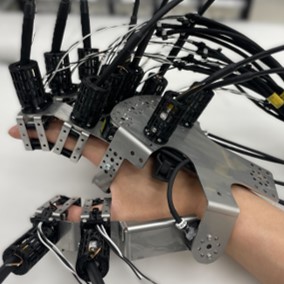
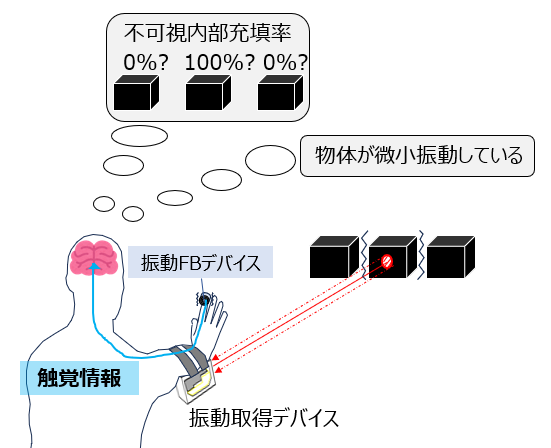
- 手首装着型レーザスペックル振動計測を活用した触覚拡張による遠方物体の不可視情報識別
〇花井 俊(大阪大学 大学院基礎工学研究科)、岡本 祥宏(大阪大学 大学院基礎工学研究科)、佐藤 優志(大阪大学 大学院基礎工学研究科)、岩井 大輔(大阪大学 大学院基礎工学研究科)、佐藤 宏介(大阪大学 大学院基礎工学研究科) - 我々は、イベントカメラを用いたレーザスペックル振動計測システムを手首に装着し、遠方物体の振動情報の可触化から感覚追加する身体拡張ウェアラブルシステムを提案している。本報告では、遠方物体の外見からでは分からない微細な振動情報や内部充填率等の不可視情報をユーザに振動フィードバックする際の、対象へのプローブ振動の付与の仕方や感度との関係について述べる。
- 1E1-08
- ユーザの深呼吸の状態を計測するデバイスの提案〜キャラクタ操作としての応用〜
〇羽田 晶一(湘南工科大学)、堀越 力(湘南工科大学) - 本研究では実際の深呼吸の動作を使ったアクションゲームを提案する.リュックサックの両方の肩ベルトにアナログスティックを取り付け,張力でアナログスティックを傾け呼吸を検知するデバイスを考案した.提案デバイスにより深呼吸の僅かな動きの検出が可能となり,ゲーム内のキャラクタの深呼吸の動きを,ユーザの実際の深呼吸の動きとして入力することが可能となった.従来手法と比較し,ゲームの没入感がより高まることを示す.

- 1E1-09
- 狭可動範囲ハンドヘルド力覚提示装置による空間ベクトル場提示
〇山邉 泰雅(筑波大学)、矢野 博明(筑波大学)
- 1E1-10
- 取り下げ
- 1E1-11
- 馬の視野角を魚眼カメラを用いてリアルタイムに体験するHMDデバイスの開発
〇齋藤 達也(東京工芸大学)、高村 環(東京工芸大学)、阿部 一直(東京工芸大学) - 本研究では、馬の視野を体験できるHMDデバイス『U-HMD』を提案する。デバイスの左右に2台の魚眼カメラを取り付け、映像を体験者の両眼に提示することで、馬の視野体験を試みる。デバイスの設計には3Dプリンタを用いており、本発表ではリアルな馬型の外装の制作方法も紹介する。また、U-HMDを装着することで、馬の視野の特徴を体験できるかどうかを調査・実験した。

口頭発表10:10-10:50 、ポスター発表11:45-12:30
クロス・マルチモーダル2
- 1A2-01
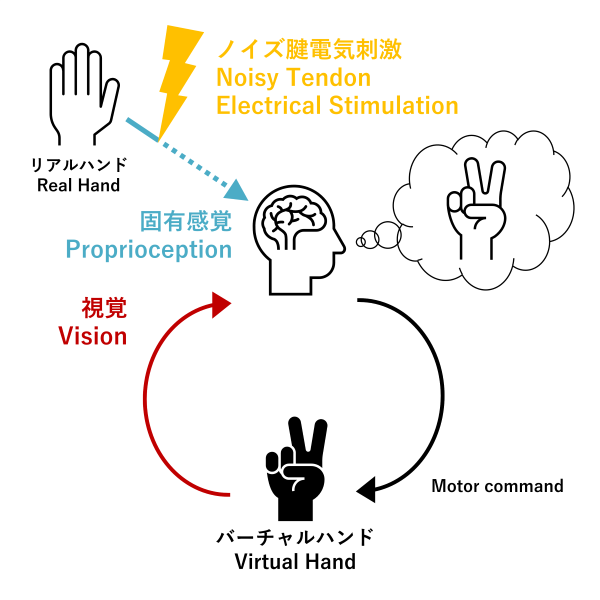
- ノイズ腱電気刺激による固有感覚精度低下を用いた超現実ハンドインタラクションへの適応促進
〇小川 真輝(東京大学、産業技術総合研究所)、松本 啓吾(東京大学)、青山 一真(東京大学)、鳴海 拓志(東京大学) - VRでは現実の制約に囚われないインタラクションが提案されているが,新規の身体モデルへの適応の難しさから,パフォーマンスや身体化感覚の低下するという課題がある.本研究では手のインタラクションに着目し,ノイズ腱電気刺激を用いた固有感覚精度低下による新規身体モデルへの適応促進手法を提案する.本稿ではその第一段階として,固有感覚精度の測定で電気刺激量を個人最適化する方法を検証した.<#%BR%#>実験の結果,先行研究で手の身体位置認識への介入に効果があった刺激量で固有感覚精度が低下する参加者が多い傾向が見られ,今回の調整法の妥当性が一定程度確認された.
- 1A2-02
- XRにおける視覚情報の提示条件が催眠体験に及ぼす影響
〇稻田 匡紀(早稲田大学)、河合 隆史(早稲田大学) - 精神的健康や医療をはじめ様々に応用可能な催眠は、機序解明や応用可能性を追求する研究が進められている。より複雑な暗示に段階的に誘導する催眠体験の流れを踏まえると、応用的な暗示の前に、まずは簡単な暗示に反応しやすくなる工夫が求められる。そこで本研究は、クロスリアリティ(XR)を用いて暗示内容を視覚的に提示することで、催眠体験にどのような影響が及ぼされるか検証した。

- 1A2-03
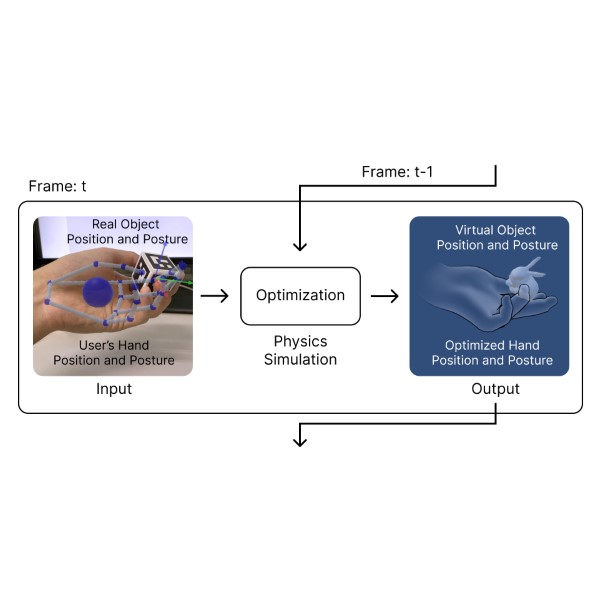
- 物理シミュレーションに基づく最適化による物体把持手指の姿勢生成
〇栗林 郁馬(埼玉大学)、入山 太嗣(埼玉大学)、小室 孝(埼玉大学) - 本研究では,実物体を手に持って動かすことで仮想物体を操作するシステムにおいて,自然な手指の姿勢を生成する手法を提案する.提案手法では,物理シミュレーションに基づく最適化によって,実物体とは異なる形状の仮想物体に合わせた,物理的に尤もらしい手指の姿勢を生成する.実験では,手指と仮想物体の物理的なつり合いを維持しつつ,仮想物体を把持する手指の姿勢を生成できることを確認した.
- 1A2-04
- 文脈改変を用いた痛みのマスキング
〇小野田 響(電気通信大学)、今 笙羽(電気通信大学)、高見 太基(電気通信大学)、牛山 奎悟(電気通信大学)、溝口 泉(電気通信大学)、梶本 裕之(電気通信大学)
- 1A2-05
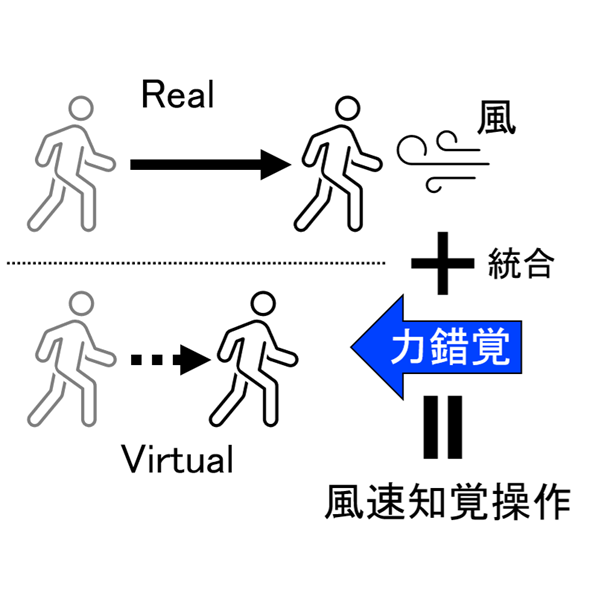
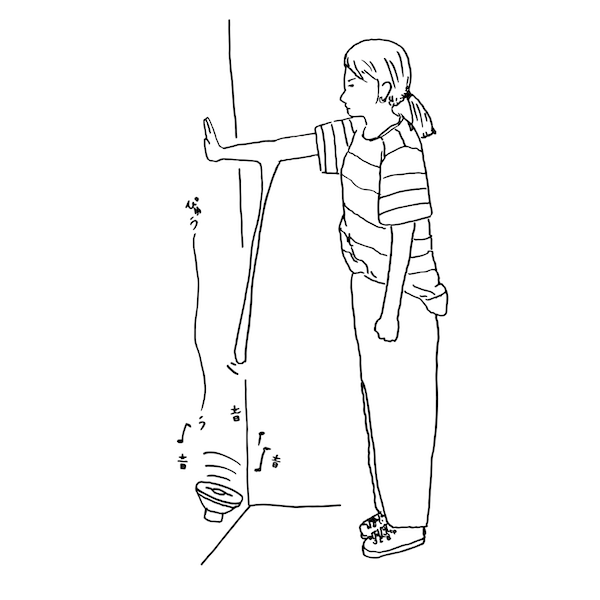
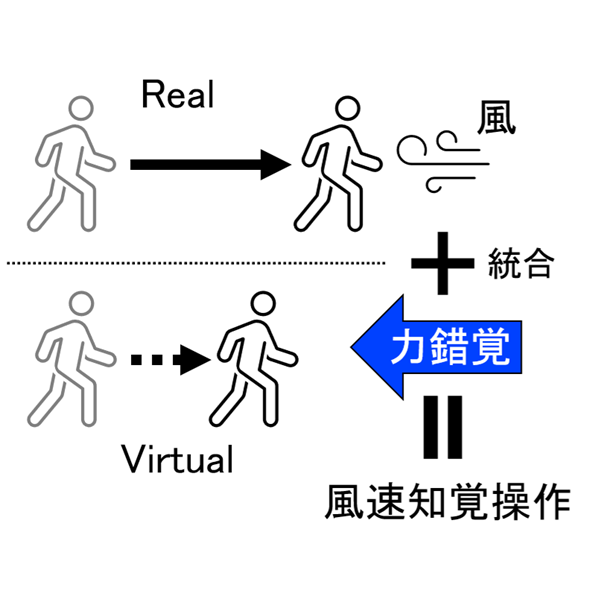
- 歩行の移動量操作によるPseudo-hapticsを用いた風速知覚の増強
〇鷹觜 慧(東京大学)、伊東 健一(Diver-X 株式会社)、細井 十楽(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - ファンによる強風提示では装置の大型化等が問題となる。本研究は、この課題に対しPseudo-hapticsを用いて実際の風を強く知覚させることを提案する。検証のため、VR環境で小型ファンの風を提示し、風速とpseudo-hapticsを変化させた。一部の条件で風と同方向の力錯覚により風が強く知覚される傾向があった。この結果から、風による抗力がpseudo-hapticsで強く知覚されたと推測される。
- 1A2-06
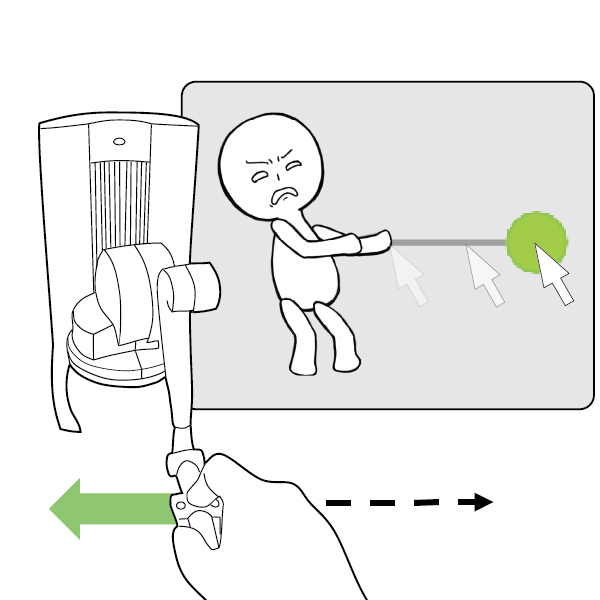
- エージェントの表情により生起する力覚の物理量による定量化
〇亀岡 嵩幸(筑波大学)、松山 菜々(筑波大学)、松田 壮一郎(筑波大学)、蜂須 拓(筑波大学) - これまでに我々はディスプレイとマウスで構成された人とエージェントとのインタラクティブシステムにおいて,エージェントの表情がネガティブに変化するとニュートラルな表情と比べて大きい力覚が生起することを示した.本稿では,この力覚を物理量による定量化のため力提示装置を導入した心理物理実験について報告する.
- 1A2-07
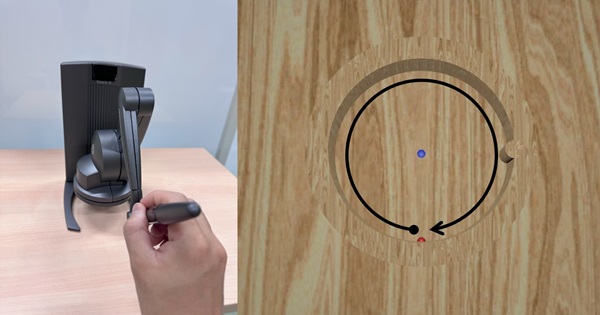
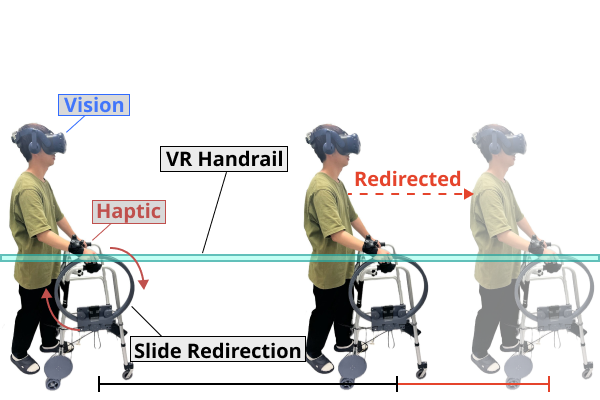
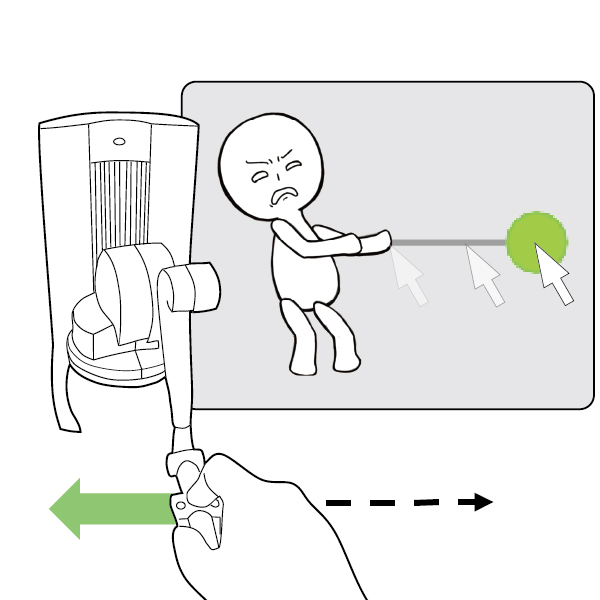
- Slide Redirection: 視覚と手すりのスライド触覚の相互作用によるリダイレクテッドウォーキング
〇大橋 夢叶(奈良先端科学技術大学院大学)、松本 啓吾(東京大学大学院情報理工学系研究科)、平尾 悠太朗(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、酒田 信親(龍谷大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - Slide RedirectionはVR空間での移動感覚を変容させるシステムであり,従来の視覚操作のみの並進方向のRedirected Walking (RDW)に加えて,触覚の提示を行う.ユーザの歩行に合わせて回転する円形状の手すりにより握る際の摩擦のような触覚を提示し,並進方向のRDWを拡張する.実験の結果,Slide Redirectionを利用した際に手すりのスライドゲイン = 2.69の場合に並進ゲイン = 2.67 ± 0.39を提示可能なことが分かった.また,スライドゲインをより大きくした場合に移動距離が実際より長いことに気づく検出閾値が並進ゲイン = 3.00以上である可能性が示唆された.
- 1A2-08
- 空中超音波触覚提示における主観的衝撃感の向上
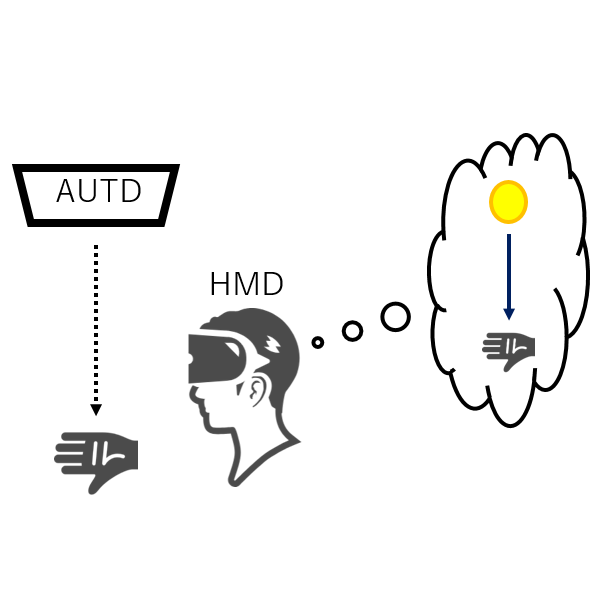
〇佐々木 大祐(東京大学)、牧野 泰才(東京大学)、篠田 裕之(東京大学) - 超音波を用いた触覚提示では物理的に大きな力を提示できないことが知られる.そのため,超音波の振幅や焦点位置の変調を行い主観的に大きな力を感じさせる研究が行われてきた.本研究では扱う刺激の種類を衝撃感(瞬時的な触覚刺激)に絞り,主観的な強度を増す提示手法について検討する.超音波の提示時間や視覚情報との相対的なタイミングを変化させる実験を行った結果,超音波の提示時間を長く引き伸ばすことで衝撃感が高まる可能性があることを示した.
- 1A2-09
- 取り下げ
- 1A2-10
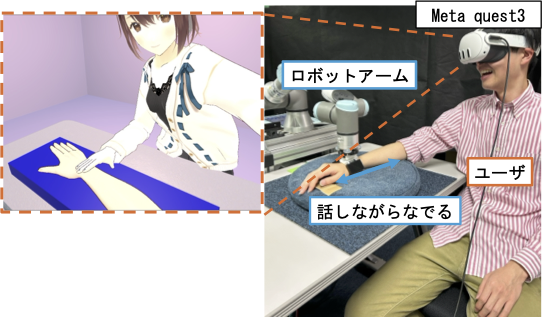
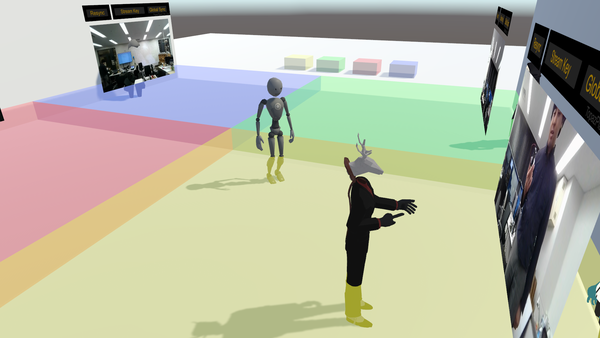
- 癒し体験:VR/ARエージェントによる心地よい「話しながらなでる」動作
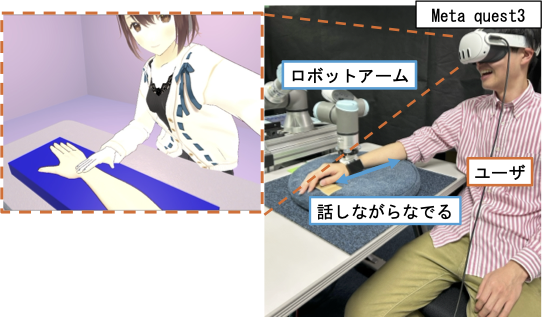
〇新江田 航大(奈良先端科学技術大学院大学)、澤邊 太志(奈良先端科学技術大学院大学)、神原 誠之(奈良先端科学技術大学院大学、甲南大学)、加藤 博一(奈良先端科学技術大学院大学) - ロボットによる「話しながらなでる」動作は人の快感情を増加させ痛みを軽減する効果が確認されている.しかし,人間の感覚は90%以上が視覚情報であるため,どのような人が,どのように「話しながらなでる」かによって,快感情や痛み軽減効果に変化があると考えられる.本研究では,VR/AR環境で人型エージェントによる「話しながらなでる」システムを開発する.このシステムは触覚,聴覚,視覚を統合した上質な心地よい体験を提供する.
- 1A2-11
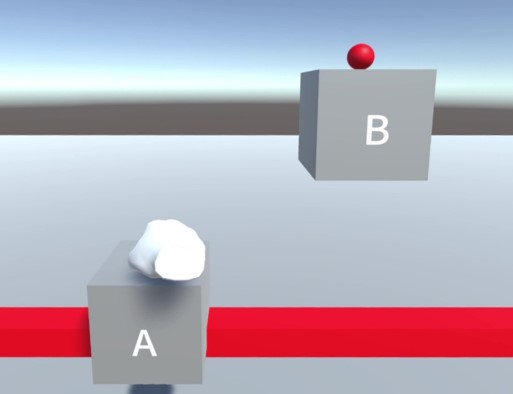
- VR環境において体積の異なる物体の落下映像と付与された衝撃音が重量知覚にもたらす影響
〇外山 昂久(東海大学)、松本 隼哉(東海大学)、石毛 智哉(東海大学)、水谷 賢史(東海大学) - VRにおけるクロスモダリティの先行研究では視覚や触覚刺激を用いた報告が多く、聴覚刺激を含めた場合については少ない。それを踏まえて先に我々はダンベルの落下時に金属と木材の2つの音色の落下衝撃音を含めた映像を提示し、落下衝撃音の音高を変えると重量感覚が変わることを報告した。本研究では落下対象のダンベル状の物体の体積と落下衝撃金属音の音高を変化させ、重量感覚への影響を調査し、用途の汎用化を図る。
口頭発表10:10-10:50 、ポスター発表11:45-12:30
移動感覚・テレプレゼンス
- 1B2-01
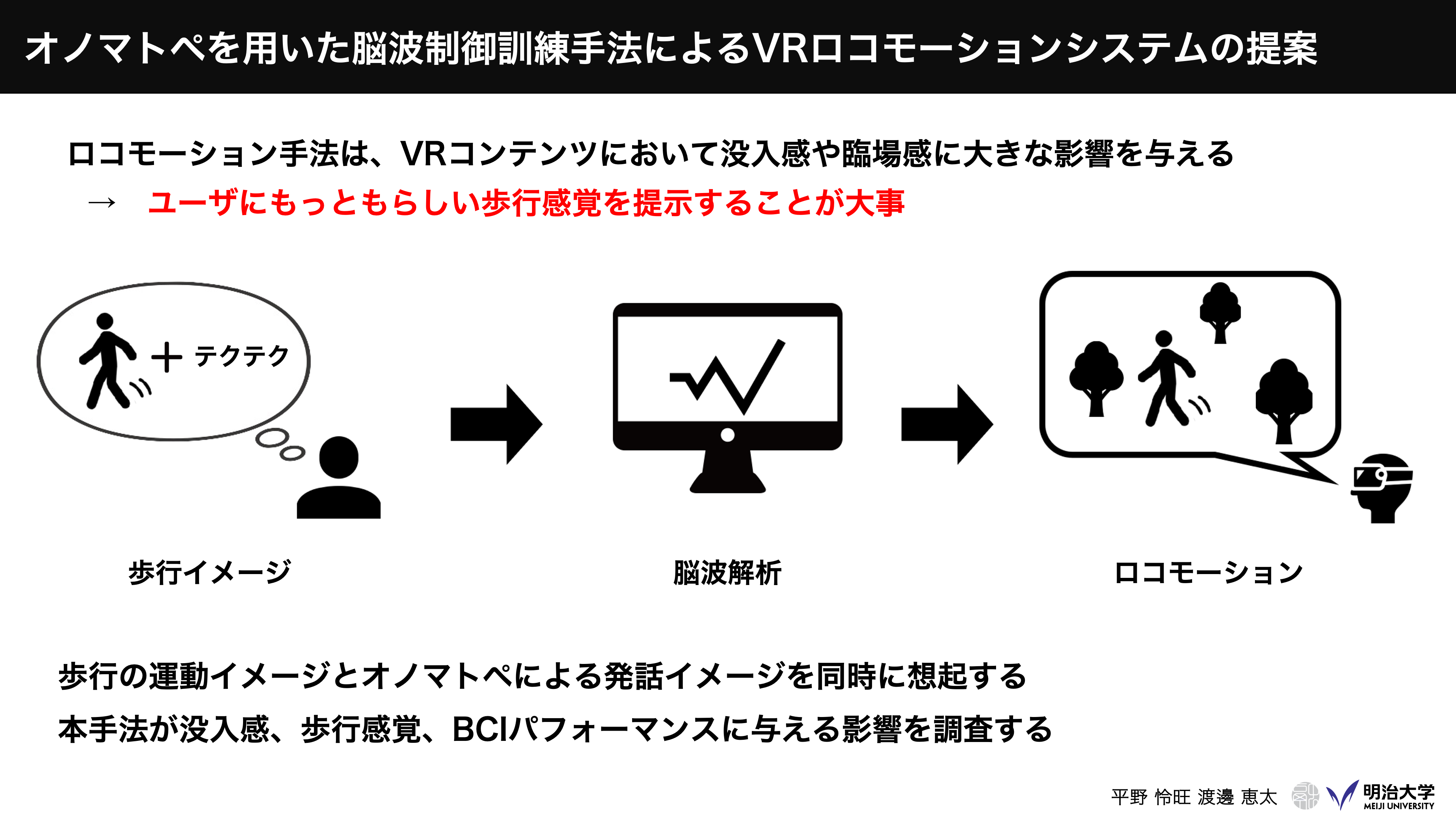
- オノマトペを用いた脳波制御訓練手法によるVRロコモーションシステムの提案
〇平野 怜旺(明治大学)、渡邊 恵太(明治大学) - 本研究では,オノマトペを用いた脳波制御訓練手法によるVRロコモーションシステムを提案する.ユーザは歩行の運動イメージと歩行に関連するオノマトペによる発話イメージを同時に想起することにより,バーチャル環境内を歩行できる.このマルチモーダルなアプローチにより,安定した脳波パターンの生成を促し,イメージに基づく移動操作を可能にする.本稿では,本手法がユーザの歩行感覚やパフォーマンスに与える影響を調査する.
- 1B2-02
- 潜水状態がベクションに与える影響
〇関 公一朗(筑波大学大学院)、橋本 悠希(筑波大学大学院) - 本研究では、潜水状態が視覚誘導性自己運動感覚(以下ベクション)に与える影響を明らかにすることを目指す. 潜水状態では擬似的な無重力状態になることから, 自己位置推定を平衡感覚よりも視覚情報に強く頼り、ベクションの増加が予想される.そこで本稿では,陸上状態と潜水状態でベクション刺激を60秒間提示し、生起した自己運動感覚の強度をベクションの強度、ベクション潜時で評価・比較した結果を報告する。

- 1B2-03
- AMURO、行きまーす!:超加速感を実現する自動運転VRシステムの検討
〇清水 祐輝(奈良先端科学技術大学院大学)、重藤 瞭介(奈良先端科学技術大学院大学)、野口 翔平(奈良先端科学技術大学院大学)、澤邊 太志(奈良先端科学技術大学院大学) - 自動運転車内での没入型エンターテイメント研究は増えており,VR映像コンテンツを車両挙動に同期させ,搭乗者の視覚と体感を一致させることで,没入感向上の効果があることが知られている.これらの既存研究を元に,本研究では,車両挙動を利用した,より没入感の高い自動走行VRエンターテイメント実現のため,まずは車両の加速時の挙動に注目し,加速以上の超加速感を搭乗者に知覚させる新しい自動走行没入型システムを提案する.

- 1B2-04
- 仮想空間内における視線と頭部運動協働によるユーザー回転手法
〇寺田 淳之介(横浜国立大学)、岡嶋 克典(横浜国立大学) - 視線と頭部運動を協働させることでVR空間においてユーザーが自由かつ直感的に連続的に回転できる手法を提案する。ユーザーと相対座標を固定した、目の前のオブジェクトに対してユーザーが視線を送り続けながら頭部運動を行うことで、ユーザーは連続的に回転を行うことができる。視線と頭部を協働させることで誤作動を防ぐ他、ハンズフリーで自由に操作可能でありVR酔いも抑制することができる。
- 1B2-05
- Walking-in-Placeにおける仮想階段昇段のための垂直運動位相一致手法
〇猿川 聖(横浜国立大学)、岡嶋 克典(横浜国立大学) - Walking-in-Placeによる仮想階段昇段について,垂直方向の下肢運動と視覚的運動の位相を現実の昇段運動と一致させる手法を開発した.提案手法,位相を考慮しない手法,提案手法と同様の視覚的運動が得られるコントローラ操作の3条件について,疑似階段昇段時の歩行感を比較した結果,提案手法が位相を考慮しない手法と比べて下肢動作や視覚的運動をより再現できることが示された.
- 1B2-06
- 自動運転時の移動感覚軽減のためのモーションプラットフォーム設計
〇清水 祐輝(奈良先端科学技術大学院大学)、澤邊 太志(奈良先端科学技術大学院大学)、神原 誠之(甲南大学)、加藤 博一(奈良先端科学技術大学院大学) - 自動運転によって搭乗者は車内で自由な活動が可能となる一方で,車両からの加速度刺激は車内活動の妨げとなる.既存研究では,視覚と体感の制御による搭乗者の移動感覚軽減を提案したが,体感制御で用いたモーションプラットフォームの設計は従来の運転経験に基づいて行っていた.そこで本研究では,実環境の走行で発生する加速度刺激の特性と人の加速度刺激の知覚特性からモーションプラットフォームを再設計する.
- 1B2-07
- 映像視聴時の自動走行酔い軽減のための空間オーディオ情報提示による重心移動の検討
〇澤邊 太志(奈良先端科学技術大学院大学)、神原 誠之(奈良先端科学技術大学院大学、甲南大学)、加藤 博一(奈良先端科学技術大学院大学) - 自動走行化することによって,多くの搭乗者は動画視聴などの映像コンテンツを見ることに時間を費やすことが予測されている.しかし,走行中の予測困難な車両挙動からの複数の刺激により,自動走行酔い発症の増加も懸念されている.よって本研究では,自動走行環境における映像コンテンツ視聴時の酔い軽減を目的とし,空間オーディオを用いた自車挙動の情報提示による重心移動の誘導手法を提案する.
- 1B2-08
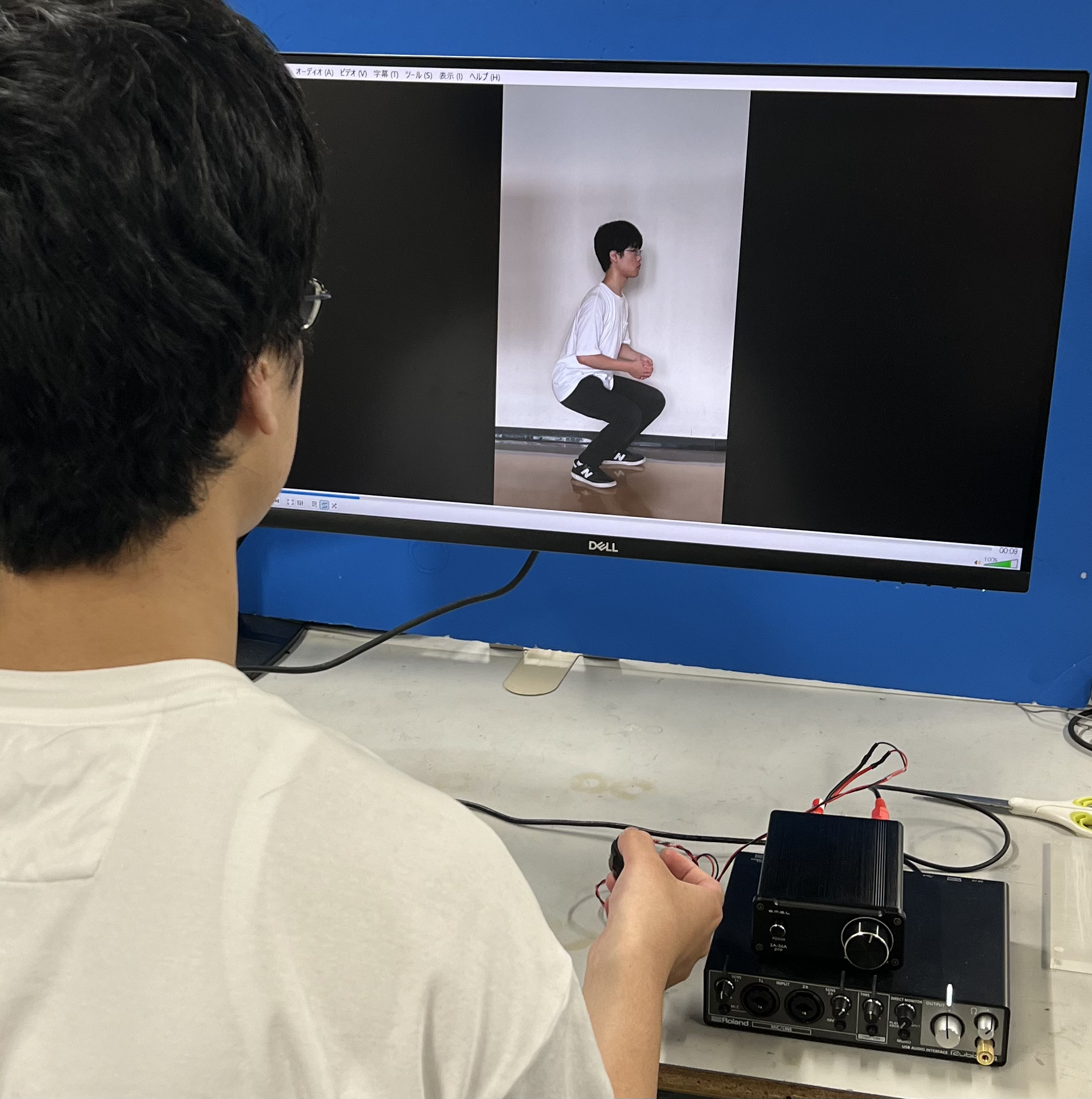
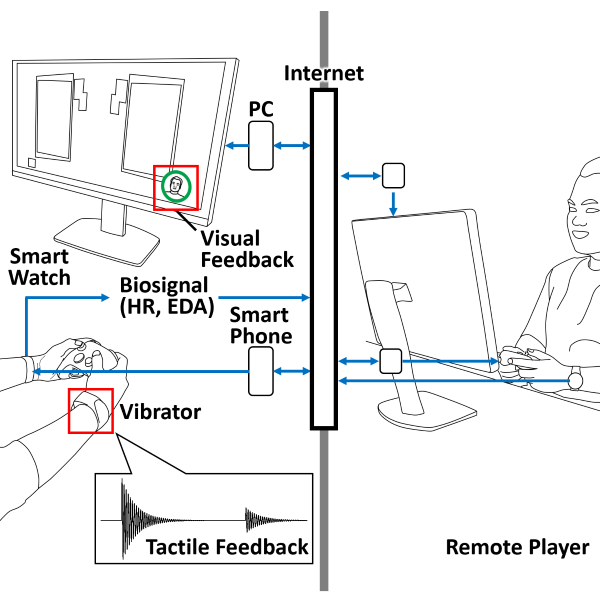
- 情動体験を拡張する疑似心拍振動提示システム(第4報):eスポーツプレイヤの存在感増強を目指した生理反応の提示
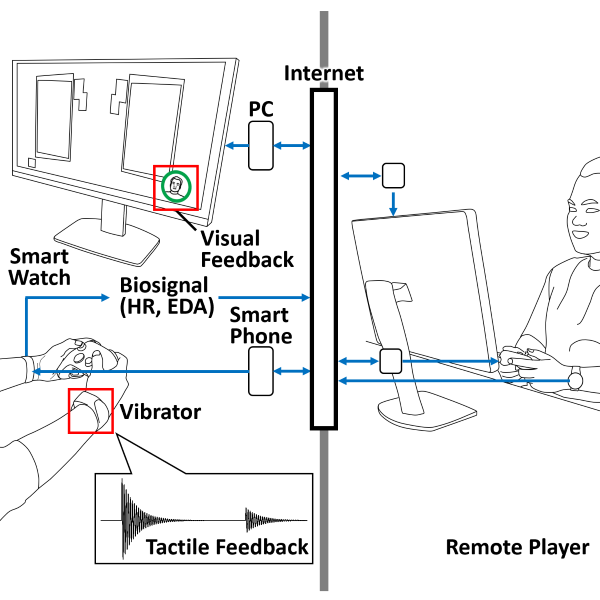
〇森 理樹(筑波大学)、高田 崇天(筑波大学)、梶浦 雅之(筑波大学)、ハサン モダル(筑波大学)、蜂須 拓(筑波大学) - 我々はこれまでに,リモートコミュニケーションにおける社会的信号の触覚的伝達を目的に,感情の時間的変化(情動)を想起させる人工的な心拍を模した振動刺激(疑似心拍振動)の設計に取り組んできた.本発表では,eスポーツにプレイヤの存在感の増強を目指し,生理反応を計測して疑似心拍振動によって遠隔のプレイヤに実時間で相互に伝達するシステムの設計について報告する.
- 1B2-09
- 実空間-VR環境における同時複数個所での会話を実現するためのサウンドループバック防止手法
〇前田 新(明治大学)、三武 裕玄(明治大学) - 実空間とVR空間を接続するシステムにおいて同時複数個所での音声伝達を試みる際に,ハウリングやループバックによって会話が阻害されることがある.本研究では,VR空間側の音声伝達のON/OFFを制御することで,通常のエコーキャンセルマイクスピーカー(1対1のエコーキャンセル能力のみをもつ)を複数使うだけでハウリングやループバックを起こさずに,VR空間と現実空間の間で複数の会話が同時に成立可能な環境を作る手法を提案する.
- 1B2-10
- 話者CGモデルを実空間アバターロボットに提示するXR遠隔対話システム
〇米田 悠人(東京都立大学大学院)、小島 優希也(東京都立大学大学院)、福地 庸介(東京都立大学大学院)、YEM VIBOL(筑波大学大学院)、池井 寧(東京大学大学院)、西内 信之(東京都立大学大学院)
- 1B2-11
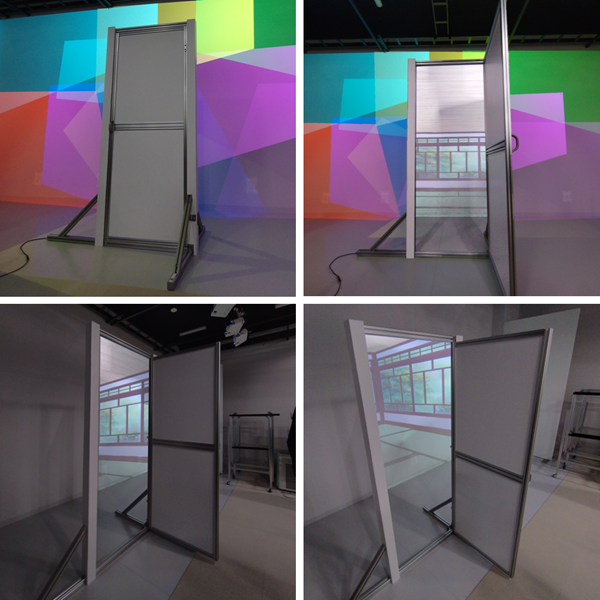
- ドアを介して空間の接続を行うプロジェクションマッピングの検討(第2報)
〇稲田 優輝(電気通信大学)、橋本 直己(電気通信大学) - 遠隔コミュニケーション技術の発展により,遠隔地間での対話が可能になった.臨場感の向上を目指し,遠隔地を空間ごと表示するシステムも開発されている.一方で,空間の接続前後の映像切り替えがユーザに提示されると,臨場感に悪影響を及ぼしてしまう.本稿では,遠隔地空間との接続表現において,ドアの開閉による自然な映像切り替えを行うプロジェクションマッピングを提案し,臨場感と娯楽性への効果を検証する.
- 1B2-12
- 遠隔MRロボットアーム制御によるスマートな3Dスキャンシステム
〇宇佐美 龍斗(名古屋大学)、渡邊 企章(名古屋大学)、具志 祐希(名古屋大学)、筒井 秀斗(名古屋大学)、渡辺 圭貴(名古屋大学)、加納 一馬(名古屋大学)、相川 雄也(名古屋大学)、志村 魁哉(名古屋大学)、林田 望海(名古屋大学)、浦野 健太(名古屋大学)、米澤 拓郎(名古屋大学)、河口 信夫(名古屋大学) - VRヘッドセットは広く社会に普及しつつあるが,ヘッドセットを通じた実社会への応用は十分に促進されていない.本研究では,VRヘッドセットを通じて遠隔地のロボットアームを用いた直感的な作業ができる枠組みを構築し,例としてロボットアームにRGB-Dカメラを取り付けて遠隔3Dスキャンを行う.本システムはWebブラウザを介して一般的なVRヘッドセットでアクセスが可能であり,幅広い分野での活用が期待される.

口頭発表10:10-10:50 、ポスター発表11:45-12:30
作業支援・評価
- 1C2-01
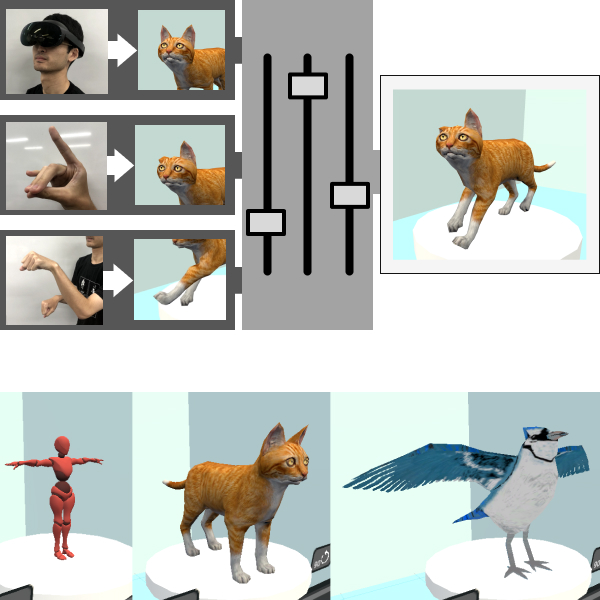
- 動作変換とその重ね合わせによる動物キャラクタアニメーションの作成
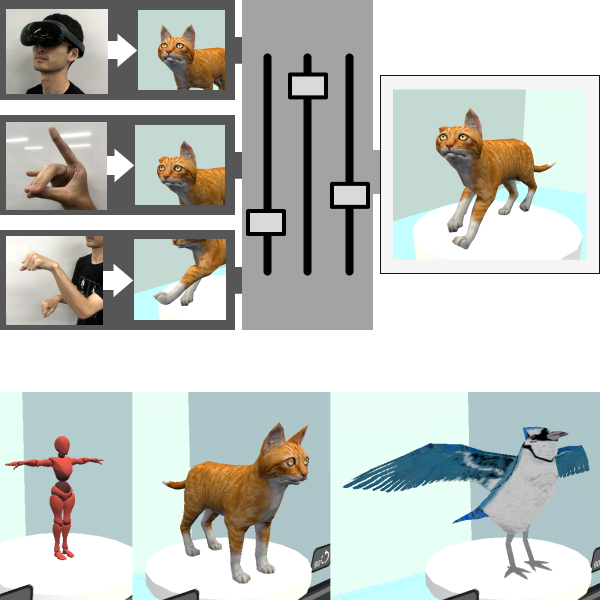
〇山口 周(東京大学)、畑田 裕二(東京大学)、鳴海 拓志(東京大学) - ヒトとは異なる身体構造を持つ動物等のキャラクタのアニメーションは様々な映像媒体で活用されているが,モーションキャプチャのような手軽な作成方法が少ない.本研究では,ユーザの身体動作をキャラクタの特定の身体部位の動作に変換して割り当てたアニメーションを作成でき,それらのアニメーションを重ね合わせることで,複雑なキャラクタアニメーションを手軽に作成できるツールを提案する.ユーザスタディの結果,参加者は概ね10分以内に動物キャラクタの全身アニメーションを作成できた.
- 1C2-02
- 取り下げ
- 1C2-03
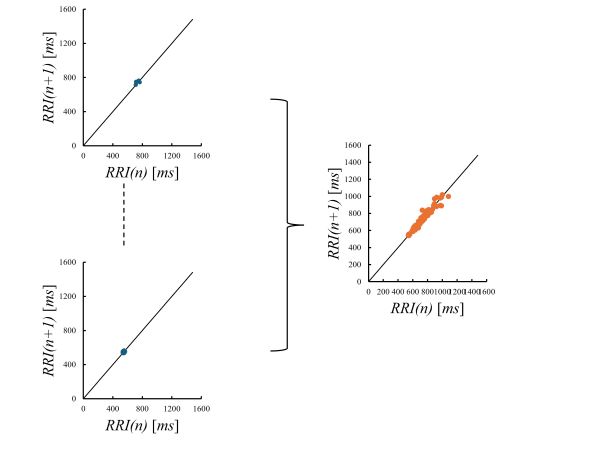
- 短時間心電図を用いた機械学習による集団のストレス負荷状態の推定
〇黒岩 啓吾(富山県立大学大学院 工学研究科)、崔 高超(富山県立大学)、唐山 英明(富山県立大学大学院 工学研究科) - 近年,VR技術が広く利用されるようになってきた.VRコンテンツの評価においてアンケート等の事後評価による手法は実時間性に欠ける.利用者の短時間のバイタルデータを用いて心的状態を推定することによるコンテンツの実時間評価の可能性を探るため,本研究では集団の心電図データを統合する解析手法を提案する.短時間での集団のストレス負荷を解析した結果,集団内のストレス負荷割合を高い精度で判別できることが分かった.
- 1C2-04
- 遠隔ロボットの回り込み動作における視点操作手法の基礎検討
〇佐々木 智也(東京理科大学、東京大学)、吉田 英一(東京理科大学) - 対象物体を中心として周回軌道上にカメラを回転させる回り込み動作は、3D CADやCG用ソフトウェアでは一般的なカメラ操作手法であり、VR空間での視点操作にも用いられることがある。しかしながら、遠隔ロボットによる実空間での回り込み動作は、機構や物理的な制約からVR空間と同様に実装することは難しい。本研究では、相対座標変化に着目した回り込み動作を適用する状況において、条件における操作性を比較する。
- 1C2-05
- Analysis of Customized Avatars, Environments, and AI support on Group Decision-Making in Virtual World
〇エピス マティア(慶應義塾大学)、小木 哲朗(慶應義塾大学) - This paper designs a VR conferencing system to maximize performance in group decision-making work contexts. A combination of aspects were analyzed, the design of avatars and environments, and AI as a communication facilitator. Experiments reveal certain design combinations enhance performance.

- 1C2-06
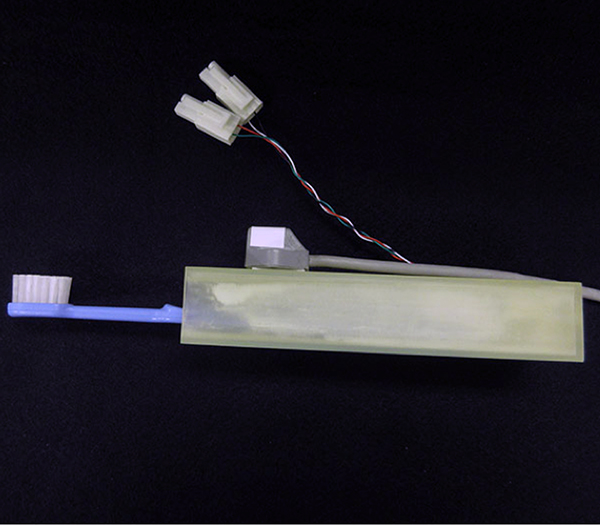
- 仕上げ磨きの動作および押し付け力による歯磨き評価システム関する基礎的検討
〇水野 文雄(東北工業大学)、菊田 和希(東北工業大学)、髙橋 正真(東北工業大学) - 歯周病は心疾患や高血圧および糖尿病などの慢性疾患との関係が指摘されている。歯周病の予防には、子供の頃から正しい歯磨きによりプラークをしっかり除去すること継続的に行う事が重要である。これまで我々は子供の仕上げ磨きの歯ブラシの動きや、接触力を測定できるシステムの開発を行ってきた。本研究では、接触力や動作に応じた可視化を行う機能の検討と実装を行い、有用性に関する検討を行ったので報告する。
- 1C2-07
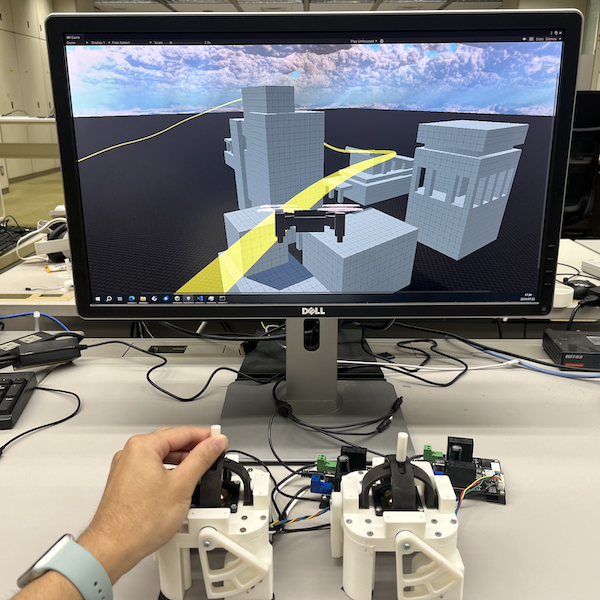
- AIとの共同操縦における感覚共有の影響の検討
〇谷地 卓(株式会社KDDI総合研究所)、橋浦 健太(慶應義塾大学)、堀内 俊治(株式会社KDDI総合研究所)、南澤 孝太(慶應義塾大学)、小林 達也(株式会社KDDI総合研究所) - AIやロボティクス技術の進歩に伴い,身体動作を伴うタスクにおいてもAIと人の協働が進みつつある.ドローンにおいて完全な自動操縦は難しく,人の操縦による介入が必要となる.しかし,人の身体動作には身体感覚情報も用いられるため,共同操縦時に人単独での操縦と同等の操縦を行うことは難しい.本研究ではドローンのAIとの共同操縦を想定し,力覚提示可能なジョイスティックを用いたドローン操縦を行い,AIの操縦感覚共有が操縦技術に与える影響について検討を行う.
- 1C2-08
- 陶芸における身体動作の特徴抽出を目的としたFMGシステム〜ハードウェアの基礎検討〜
〇三堀 二知加(慶應義塾大学)、南澤 孝太(慶應義塾大学)、堀江 新(慶應義塾大学) - 身体動作の特徴抽出において筋活動計測が用いられており、その際にはEMGを用いることが一般的である。しかし、装着の複雑さや発汗による皮膚インピーダンスの変化が計測に影響を与えることから、使用シーンが限定的である。FMGを用いた筋活動計測は装着が容易であり、発汗や接触の影響を受けづらいことが報告されている。本研究では陶芸の技能に着目し、FMGによって筋活動の計測を行うシステムを開発し、実際の現場での運用を行った。

- 1C2-09
- 医療専門職教育におけるVR環境評価学習コンテンツの有用性と課題
〇宮本 礼子(東京都立大学)
- 1C2-10
- 喜びと志の発見支援のためのVR旅行システムの開発
〇稲邑 哲也(玉川大学)、飯島 和樹(玉川大学)、後藤 玲子(帝京大学)、松元 まどか(京都大学)、松元 健二(玉川大学) - 近年のVR技術はスポーツ、教育、ヘルスケアなどの応用が展開されているが、ユーザーのウェルビーイングを向上させる観点からは、この分野はまだ発展途上であり、具体的な仮想体験の設計指針は明確ではない。そこで我々は、個人の喜びや志の発見を支援するVRシステムの構築を目指す。本稿では、脳計測を通じた喜びと志の発見支援というコンセプトに沿った、VR旅行システムのプロトタイプの実装について報告する。

- 1C2-11
- 取り下げ
- 1C2-12
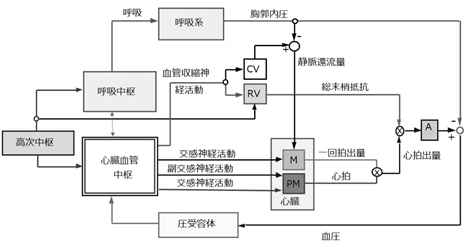
- 心拍変動指標を用いた人の状態変化の推定妥当性について
〇大須賀 美恵子(大阪工業大学) - 心拍に関わる指標はVR分野でもネガティブ,ポジティブ両面の人への影響評価に用いられてきている.心拍変動指標には多種あるが,特に低周波成分(LF),高周波成分(HF)については,古い知見に基づいた誤用が目立つ.これらの比LF/HFについても単純化しすぎた解釈が横行している.本発表では,心拍変動指標の変化要因を整理し,利活用にあたり注意すべきことをまとめる.
- 1C2-13
- 情報過多が認知機能に与える影響
〇神吉 佳佑(N高等学校)、佐々木 翼(千葉大学 子どもこころ発達教育研究センター、大阪大学大学院連合小児発達学研究科千葉校) - 近年のデジタルデバイス普及に伴うSNSアプリケーションやデバイスの多様化に伴い,ユーザーは個々に応じた端末やSNSアプリケーションを利用している.特定条件下での認知負荷について検討がなされる一方,呈示される情報量や種類と認知機能の関係について検討した研究は少ない.本研究では,現代における情報過多とその解決に必要なアプローチについて,既存の研究を体系的にレビューすることで,今後の研究課題を検討した.

口頭発表10:10-10:50 、ポスター発表11:45-12:30
感覚・知覚2
- 1D2-01
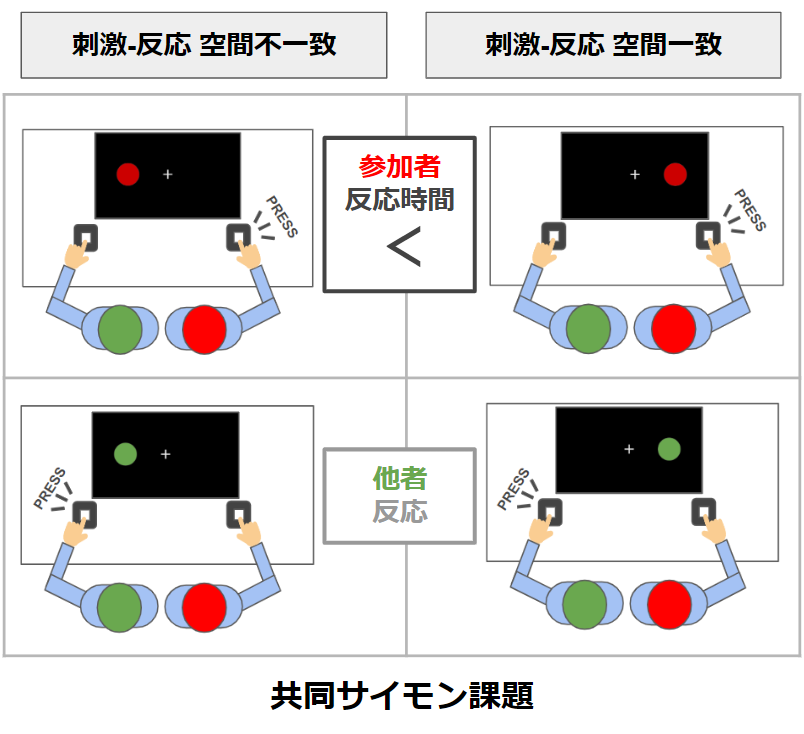
- ロボットアバタとの共同行為における外見の一致が社会的サイモン効果と自他の行為主体感の生起に与える影響
〇李 暁彤(東京大学)、畑田 裕二(東京大学)、鳴海 拓志(東京大学) - ロボット等の非生物と認識されるエージェントとの共同作業では,相手が意図を持って振る舞う動作主体と認識しにくいことで,他者の行動を自身の行為プランに組み込んで集団的な協調を達成するために現れる社会的サイモン効果(SSE)が生じにくい. 他方,外見的差異が自他弁別を促進するためSSEが生じにくいという説も主張されている. 本研究では,ロボットアバタとの共同行為において,参加者自身もロボットアバタを使用することで自他の行為に対する行為主体感とSSEが生起されるかを検証した.
- 1D2-02
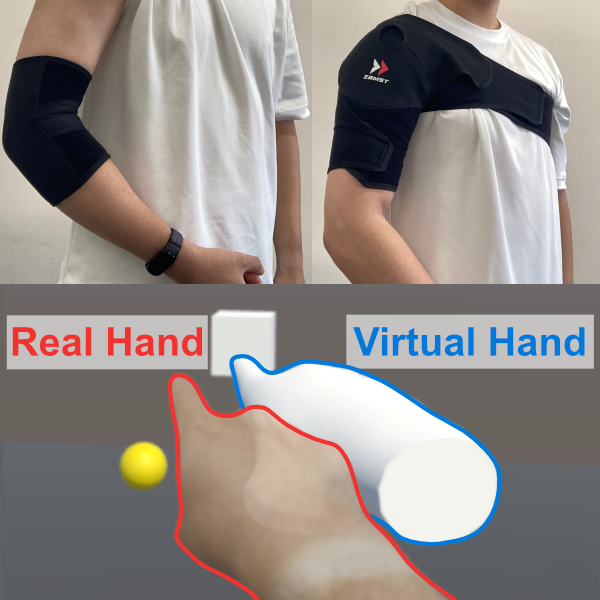
- 腕部サポーター装着によるリダイレクテッドハンドの知覚閾値への影響
〇福井 岳(東京大学)、松本 啓吾(東京大学)、中村 拓人(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学) - 実空間でのユーザの手の位置姿勢に操作を加えてアバタの手の位置姿勢として用いる,リダイレクテッドハンド(RDH)と呼ばれる技術が提案されている.RDHの応用範囲拡大のため,ユーザが操作を知覚する最小の操作量である知覚閾値の拡大が重要視される.本研究では,腕部にサポーターを装着し,動きに制限を与えることが,RDHの知覚閾値を拡大するかを検証し,その結果,肩部への装着に有意な拡大効果が見られた.
- 1D2-03
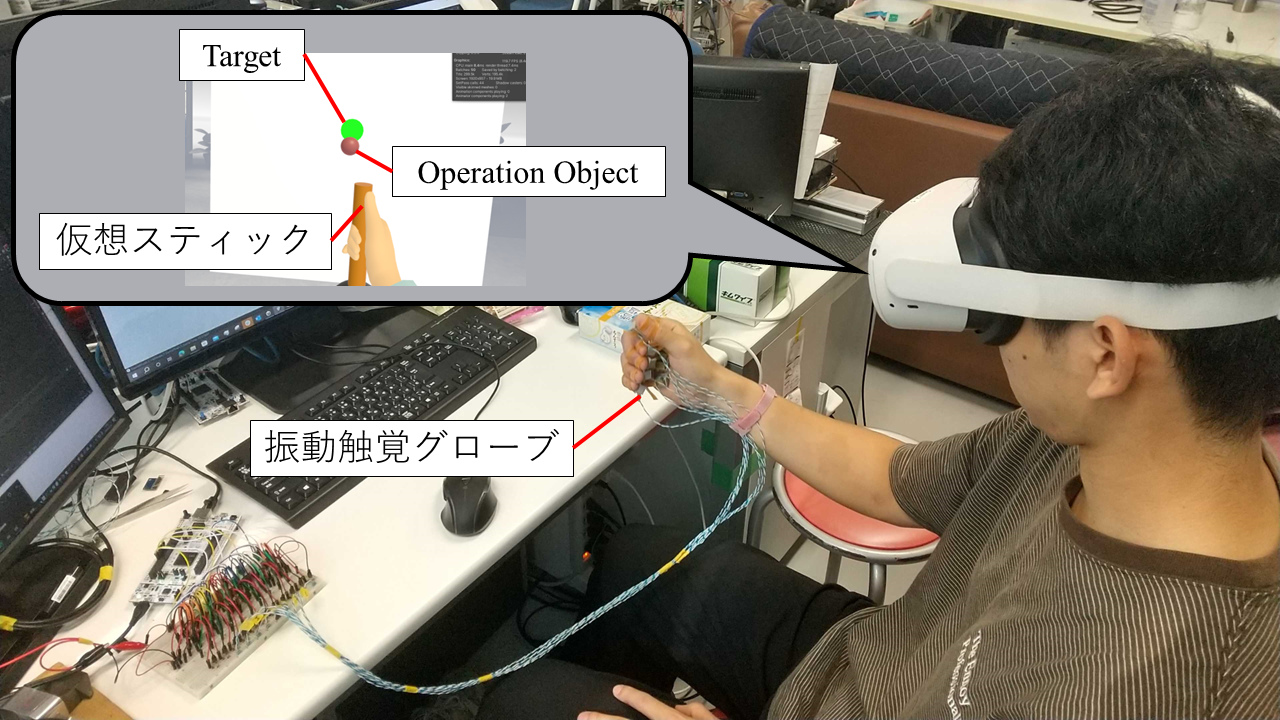
- 仮想環境での振動触覚グローブを用いた力分布の提示による把持動作の強調表現
〇伊藤 那月(東京電機大学)、五十嵐 洋(東京電機大学) - 本研究では物体を把持するときに手の各部にかかる力を「力分布」として、この力分布を振動触覚グローブで再現する。これにより、仮想環境での把持動作の操作性向上を目的としている。具体的には、現実の環境で物体を把持する際の力分布を測定し、仮想物体を把持するときに振動振幅を制御することでこの力分布を再現する。また、仮想環境で現実と異なる力分布を再現した場合、把持動作にどのような影響があるか調査する。
- 1D2-04
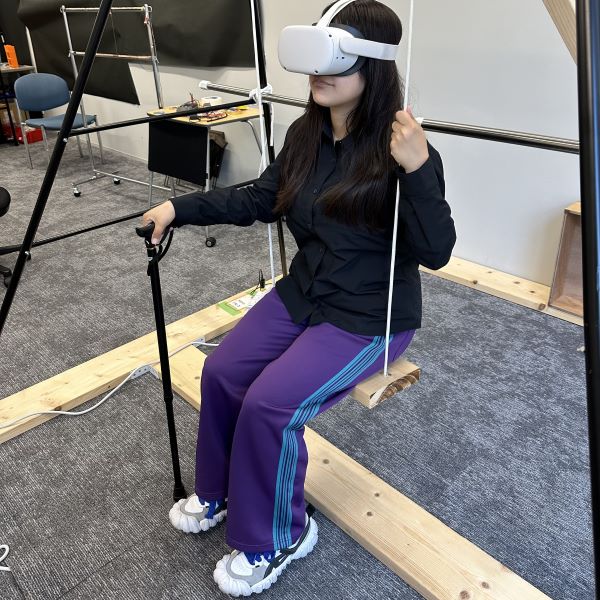
- ブランコ型VRでの体の支持条件が揺動感覚に与える影響の分析
〇潘 虹羽(立命館大学)、安藤 潤人(立命館大学)、李 亮(立命館大学)、野間 春生(立命館大学) - 現在、VR酔いの現象が課題となってきている。本研究ではVR酔いを引き起こす一つの原因と考えられる揺動感覚に着目し、同じコンテンツであっても体験方法の違いが揺動感に及ぼす影響を検証した。先行研究ではブランコ型のVRの体験時に足の接地有無で揺動感覚が大きく変わるという現象を評価した。本報告ではその要因を探ることを目的として、杖や手すりなどの異なる体験条件下で実験を行い、それぞれの揺動感覚を比較評価した。
- 1D2-05
- 時分割超音波刺激による動的な点列の方向知覚
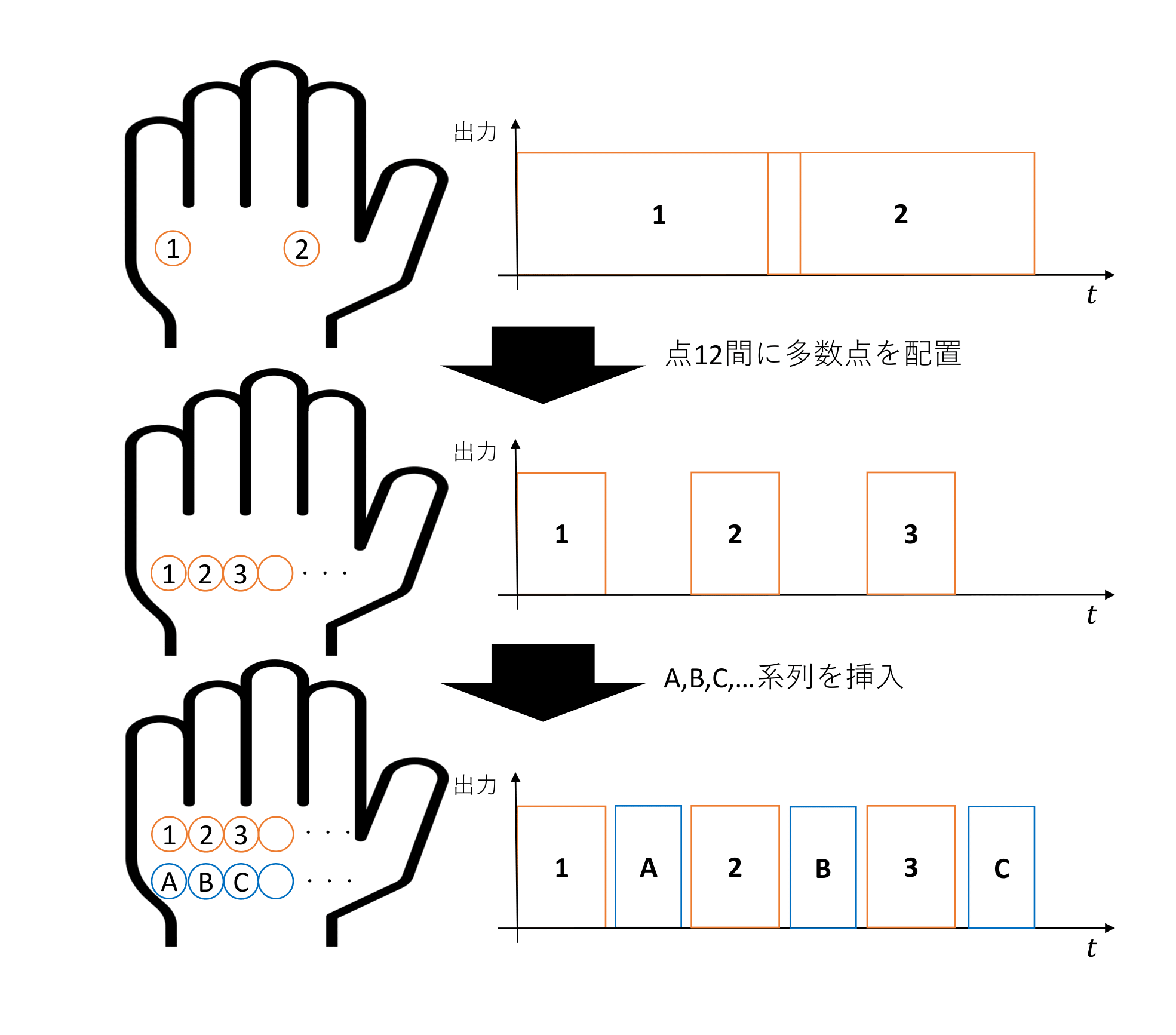
〇藤井 陽太(東京大学大学院情報理工学系研究科システム情報学専攻)、藤丸 晃浩(東京大学工学部計数工学科)、牧野 泰才(東京大学大学院情報理工学系研究科システム情報学専攻、東京大学大学院新領域創成科学研究科複雑理工学専攻)、松林 篤(東京大学大学院新領域創成科学研究科複雑理工学専攻)、篠田 裕之(東京大学大学院情報理工学系研究科システム情報学専攻、東京大学工学部計数工学科、東京大学大学院新領域創成科学研究科複雑理工学専攻) - 触覚刺激を離散的に移動させた際,刺激の提示時間間隔が小さい場合に限り,連続的な移動感を知覚する仮現運動が生じる.一方で空中超音波触覚ディスプレイ(AUTD)の強みとして刺激位置を微調整できることが挙げられる.このことを活用して刺激間距離を詰めることで提示時間間隔を広げ,空き時間に別の点を提示することで複数点の独立した刺激を提示することができる.本研究ではこのような時分割な点列提示における,複数点列の提示が知覚に与える影響について検証を行った.
- 1D2-06
- 生理指標を用いたVR空間と実空間の空間デザインによる影響の比較
〇小林 鷹智(芝浦工業大学大学院)、菅谷 みどり(芝浦工業大学大学院)、Jadram Narumon(芝浦工業大学大学院) - 近年,空間デザインの現場では,経済性の観点で空間評価にVRが用いられる.しかし,VR空間を見た後に実空間をみると,空間から受ける印象や影響が異なることがある.この場合,VRの空間評価の信頼性が低くなる課題がある.本研究では,VR空間と実空間の影響の差を事前に明らかにし,信頼性の低下を防ぐことを目的とする.実現のため,脳波・心拍指標を用いてVR空間と実空間を見た際に受ける影響の差を評価する.
- 1D2-07
- 視野反転研究における前後反転の導入による回転と並進の分離
〇山﨑 駿(大阪大学)、横山 喜大(大阪大学)、原 彰良(大阪大学、脳情報通信融合研究センター)、古川 正紘(大阪大学、脳情報通信融合研究センター)、前田 太郎(大阪大学、脳情報通信融合研究センター)
- 1D2-08
- 仮現運動による痛み錯覚の移動感提示装置の開発
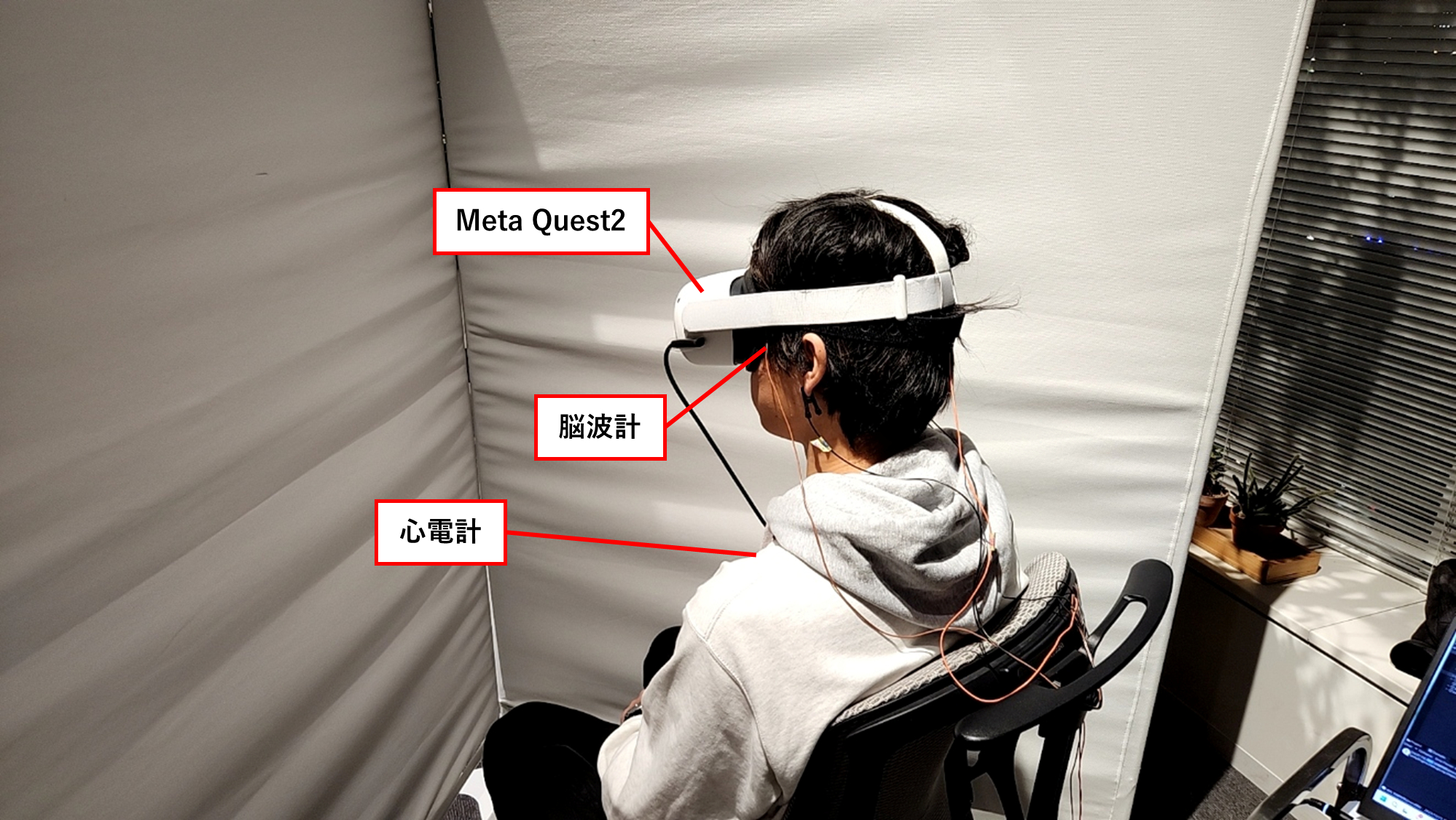
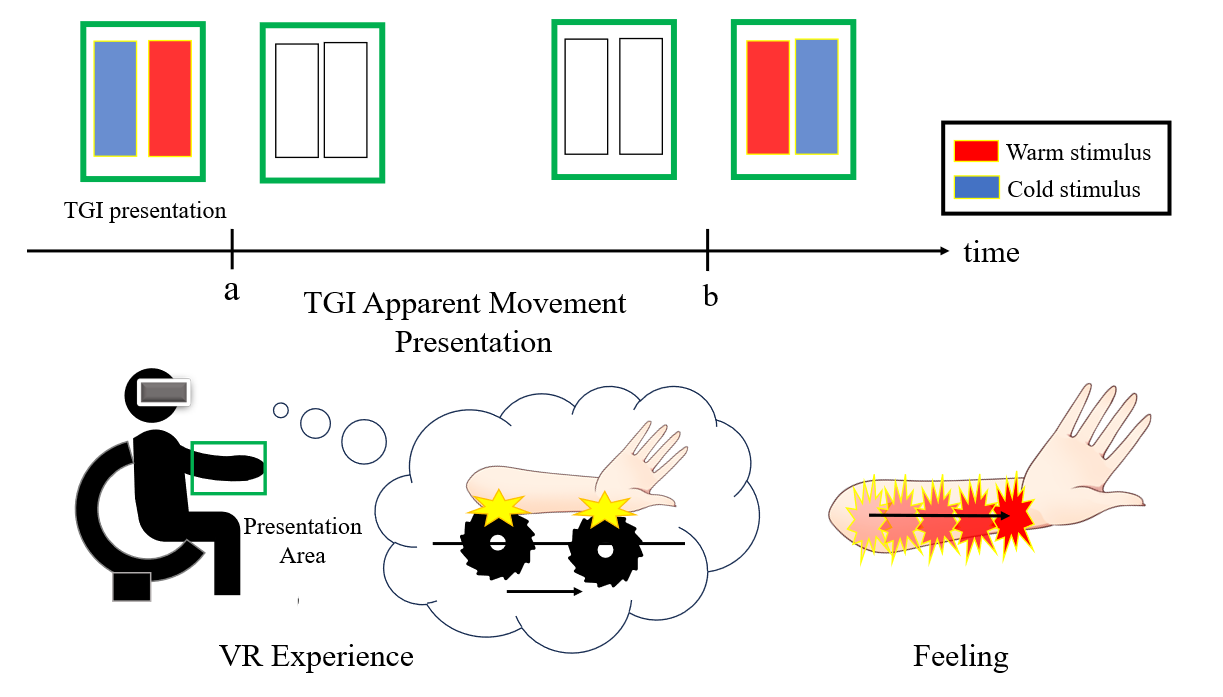
〇水野 蒼太(筑波大学)、許 佳禕(東京大学)、長谷川 晶一(東京工業大学)、家永 直人(筑波大学)、黒田 嘉宏(筑波大学) - 知覚位置を移動可能な痛み感覚提示は、運動する物体による痛みや動作に応じた痛みを再現する上で重要である.例えば工業機械により掻傷が生じるときや腕を熱湯に浸したときなど,刺激知覚は動的かつ連続的である.本研究では動的かつ連続的な痛み錯覚提示手法の開発を目的とする.仮現運動をサーマルグリル錯覚の非接触提示手法に適用し,動的な錯覚提示を実現する.また,提示時間間隔の条件による連続性への影響を報告する.
- 1D2-09
- 触覚による鼓動の知覚がバーチャルアバターの印象に与える影響の調査
〇桑島 理子(九州大学)、渡邊 淳司(日本電信電話株式会社)、Ho Hsin-Ni(九州大学) - 本研究では、バーチャルアバターの心拍振動を再現する触覚デバイスに参加者が触れる実験を行った。参加者はVTuberのビデオを見ながらデバイスに触れ、主観評価を行った。その結果、アバターとの社会的距離に有意な影響を与え、アバターのアニマシー、好感度、リアリティ、参加者のエンゲージメントが向上することがわかった。
- 1D2-10
- スマートフォン上でのPsuedo-Hapticsを用いた食感拡張手法の提案
〇溝口 泉(電気通信大学)、梶本 裕之(電気通信大学) - 本研究ではスマートフォン上でのPsuedo-Hapticsを用いた食感拡張手法について検討を行う。<#%BR%#>現在までに咀嚼と同時にスマートフォンを握る動作を行うことで、食感を硬く変化させることができることが示唆された。<#%BR%#>本研究では、画面上に表示した食品の形状を握り動作に合わせて変化させた際の食感の変化について調査した。<#%BR%#>結果として画像の幅を握力に応じて縮めることで食感が柔らかくなる可能性が示唆された。
- 1D2-11
- 時系列で振動刺激を与えた時のファントムセンセーション発生条件
〇野口 雄弘(東京電機大学大学院)、山本 拓実(東京電機大学)、井上 淳(東京電機大学) - 足裏に振動刺激を与えることでユーザに対し実際の歩行を行わせずに歩行時の重心移動を再現できると考えた.再現を行う方法としてファントムセンセーションに注目した.<#%BR%#>ファントムセンセーションを用いると振動刺激を与える場所を変えずに振動源の位置を錯覚させられる.与える振動には強さや大きさ,周波数,変化の割合など多くのパラメタが存在する.足裏において,周波数と刺激時間が影響することが分かった.

- 1D2-12
- 振動周波数の変動による足裏の感覚受容範囲の変化
〇野口 雄弘(東京電機大学大学院)、山本 拓実(東京電機大学大学院)、井上 淳(東京電機大学大学院) - 着座姿勢において歩行感覚の提示を目的として,ボイスコイルモータを用いて,足裏に周波数・振幅・加振時間を調整可能な振動刺激を与える。<#%BR%#>振動定時位置ごとに特定の周波数を閾値として刺激受容範囲の拡大,縮小がみられた。<#%BR%#>また,連続して振動を提示する際,与える振動周波数の高低の順序の変動や振動提示時間を増加させることで,足裏の感覚を鋭敏にできることを明らかにした。
口頭発表10:10-10:50 、ポスター発表11:45-12:30
アート・エンタテインメント
- 1E2-01
- 選択的電気刺激によるビブラートの速さ制御
〇内田 大悟(東京大学)、松原 晟都(産業技術総合研究所)、村井 昭彦(東京大学、産業技術総合研究所)
- 1E2-02
- 高松塚古墳のデジタル再現と理解支援のためのMRコンテンツ
〇宋 文澤(関西大学)、林 武文(関西大学) - 本研究では,特別史跡の高松塚古墳とその中にある壁画の理解支援を目的として,MRシステムを開発した.体験者はハンドトラッキングを通じて,直観的な操作感覚で壁画を鑑賞し,さらに懐中電灯のインターフェースを開発し,体験者が発掘時の壁画と復元図を同時に観察し見比べることを可能にした.また,天井にある壁画を鑑賞する際の身体負担を軽減する方法も提案した.

- 1E2-03
- バーチャル笑い場におけるエンゲージメント向上のための観客アバタの反応設計
〇大原 嶺(東京大学)、楊 期蘭(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学) - ライブ視聴時における観客の存在は,明示的な相互作用が無いにも関わらず視聴者のエンゲージメントに影響を与えることが知られている.本研究では,劇場を模したVR空間「バーチャル笑い場」において,バーチャル観客アバタの笑い反応の視聴覚的手がかりを系統的に操作し,視聴者のエンゲージメントに影響を与える要因を明らかにする.実験結果に基づき,バーチャル笑い場における観客アバタの効果的な設計指針について議論する.

- 1E2-04
- 配信ライブにおけるライブ感の向上に関する研究 ― 第2報 振動の影響分析と一体感向上システムの提案 ―
〇小坂 真太郎(東京工科大学大学院)、高橋 秀智(東京工科大学大学院) - コロナ禍により対面ライブなどの開催の機会が減少している中,配信ライブの機会が増えてきた.そこで本報では第1報で調査した振動によるライブ感への影響の分析や振動装置として利用したエキサイターの振動特性の調査・分析を行った.また振動以外の要素として一体感によるライブ感への影響を調査するために,実験用の一体感を向上させるシステムの提案を行った.

- 1E2-05
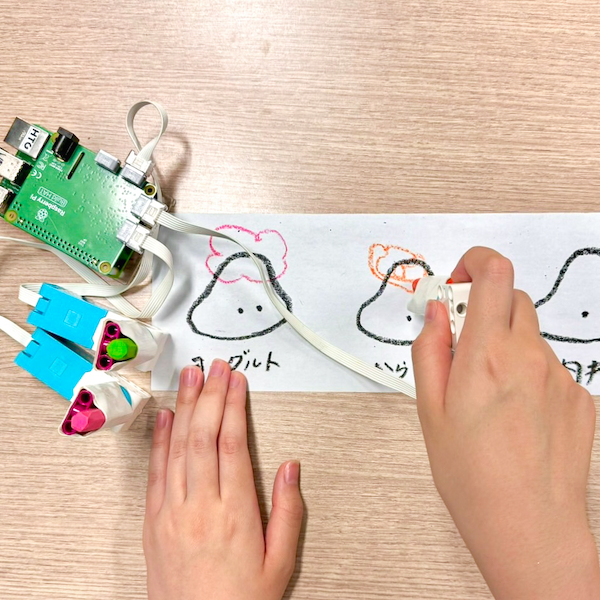
- 生活ログに合わせて動く筆記用具を用いたプレイフルなリフレクション手法「カロモン」の提案
〇大平 桜子(法政大学)、中西 ゆき菜(法政大学)、松浦 奏都(法政大学)、中條 麟太郎(東京大学 大学院学際情報学府)、矢作 優知(東京大学 大学院学際情報学府、日本学術振興会特別研究員DC)、松井 克文(東京大学 産学協創推進本部)、ソン ヨンア(法政大学) - 生活ログの可視化によりリフレクションを支援するデジタルツールが普及しているが、その多くは定量的かつ一方的な情報提供に偏重している。本研究では、デジタルツールを用いた、オルタナティブなリフレクションの可能性を探索することを目的とする。計算機と協働して身体的にリフレクションを行う手法として、生活ログに合わせて物理的に動く筆記用具を用いて、ユーザ自身が生活のログをプレイフルに描画する活動を提案する。
- 1E2-06
- 身の周りの実物体を仮想空間で用いるタンジブルARゲーム
〇漆坂 悠(埼玉大学)、入山 太嗣(埼玉大学)、小室 孝(埼玉大学) - 本研究では,身の周りの実物体を仮想空間で用いることができるタンジブルARゲームを提案する.タンジブルARゲームでは,一般物体検出および姿勢推定をリアルタイムで行い,実物体に仮想エフェクトを重畳することで視覚フィードバックを与える.これにより,ユーザは身の周りの実物体を用いた直感的なインタラクションを行い,臨場感のあるゲーム体験をすることができる.また, HMDを使用したアプリケーション例を示す.
- 1E2-07
- 「Celebrate for ME : okuru」:既存VR HMDの特徴を活かした作品制作
〇倉本 大資(東京大学)、会田 寅次郎(早稲田大学)、岡田 裕子(多摩美術大学、アーティスト) - 「Celebrate for ME : okuru」(2023)は,アーティスト岡田裕子が手がけるシリーズの主要な作品で,体験者がインスタレーションの中でHMDを装着して体験するXR作品である.2023年12月の展示に基づき,その制作に際して遭遇した課題とそれを克服するためレディメイド機器である市販のHMDを本来の使い方を外れ実装に用いた方法及び,体験者,鑑賞者のインタビューを報告する.

- 1E2-08
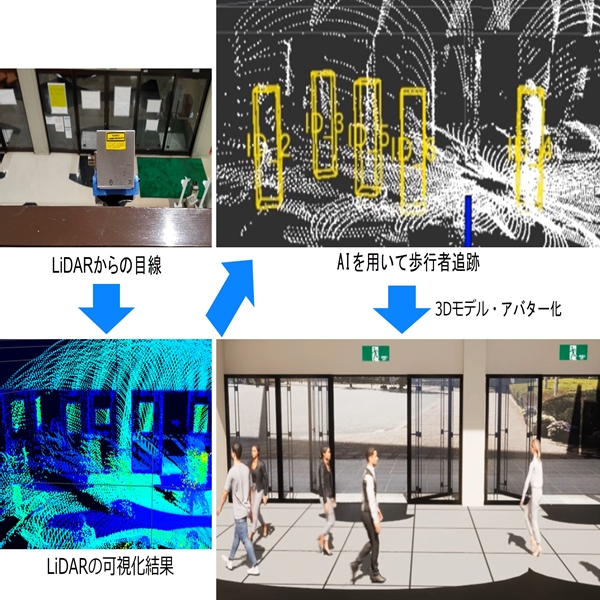
- 歩行状態を考慮したLiDARによるデジタルキャンパスの臨場感の向上に関する研究
〇大内 誠悟(大阪電気通信大学)、中原 匡哉(大阪電気通信大学) - 近年,いつでもどこからでも校内を見学できるVRを利用したデジタルキャンパスが普及し始めている.しかし,既存のデジタルキャンパスでは,実際の学生や教員の動きがなく,学校生活の雰囲気や構内の賑やかさなど,学校選びに重要な情報が不足している課題がある.そこで,本研究では,LiDARで取得した点群データから深層学習を用いてデジタルキャンパス上にリアルな学生や教員の動きを再現し,臨場感を向上する手法を提案する.
- 1E2-09
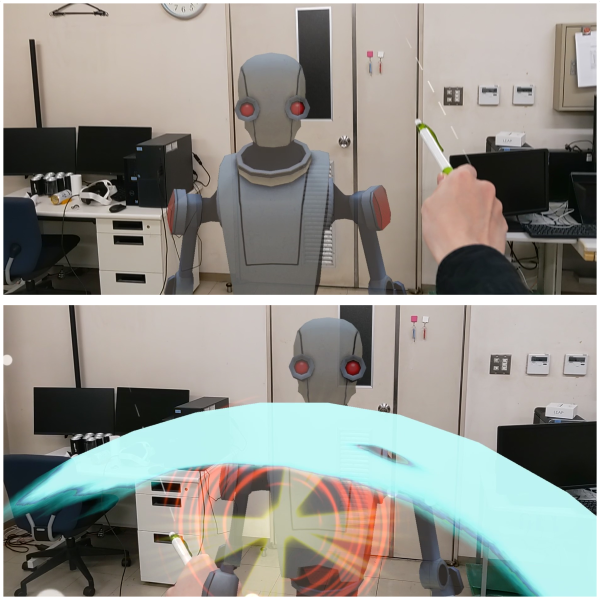
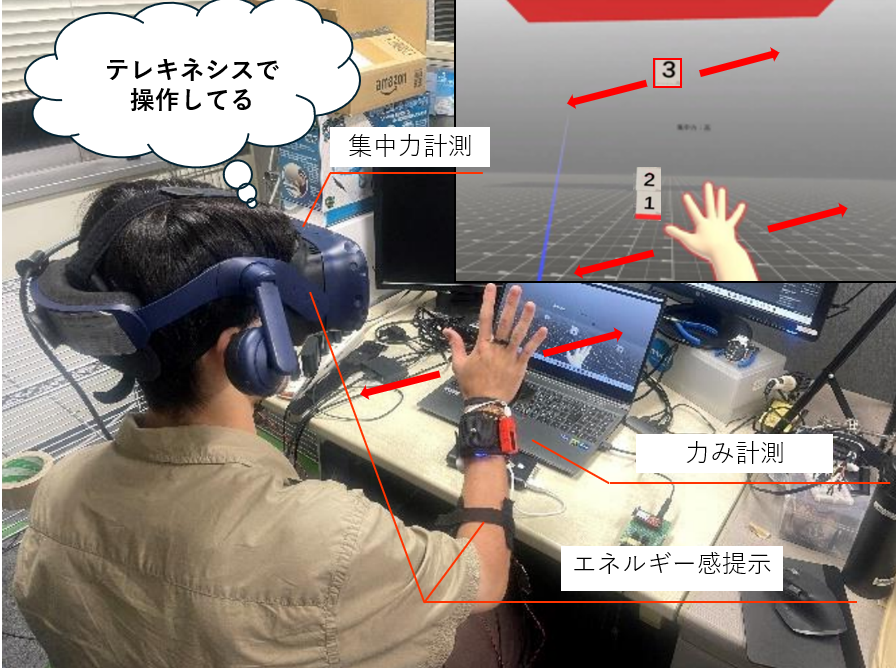
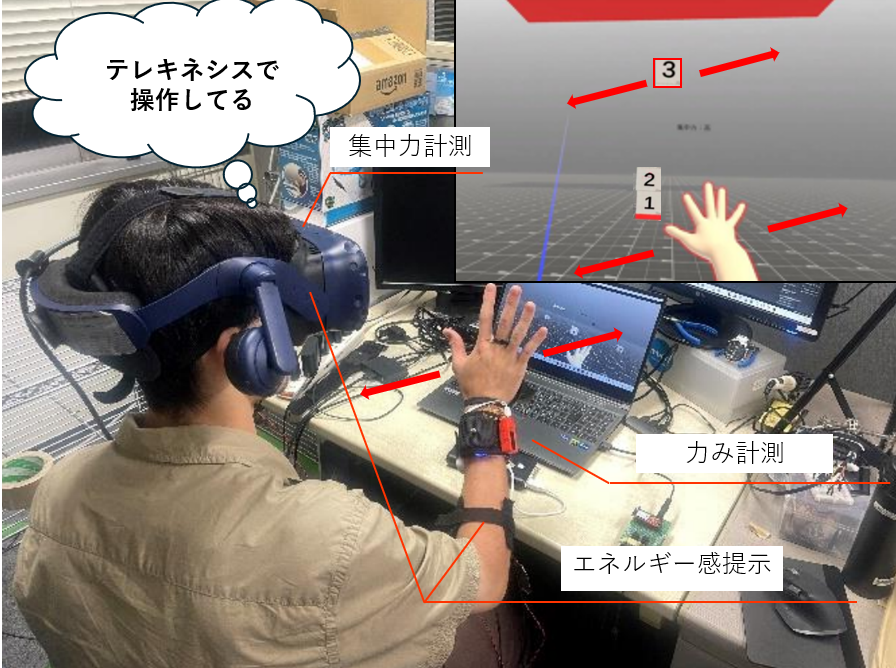
- VRにおけるテレキネシス感を表現するシステムの構築と評価
廣田 雄大(電気通信大学)、〇中谷 信吾(電気通信大学)、櫻井 翔(電気通信大学)、野嶋 琢也(電気通信大学)、広田 光一(電気通信大学) - テレキネシスは,遠隔にある物体を直接触れずに操作できる能力である.フィクション作品では,テレキネシス使用者は,手等に力を込めて対象を思い通りに操作する描写が見られる.作品の描写からは、物体に触れているわけではないにも関わらず、対象に対する行為主体感を伴っていると予想される.本研究では,VRテレキネシス体験手法を構築し,テレキネシスを体験しているような身体感覚や行為主体感を得ることができるか調査した.
- 1E2-10
- 生活を映す分身植物との共同生活に向けたデータマッピング手法の開発
〇PENG HANRUI(慶應義塾大学大学院メディアデザイン研究科)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、Zhou Songchen(慶應義塾大学大学院メディアデザイン研究科)、Liu Tianqi(武蔵野美術大学)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 本研究では、個々の日々の行動と生理反応をデータ化し、自身の生活リズムと同調して成長する分身植物を提案する。このアプローチにより、異なる時間軸のデータを統合し、それに基づいて個人の生活パターンを反映する分身植物を生成する。このシステムは、個人が自らの行動をリアルタイムで視覚化することで、より深い自己理解と自己認識を支援するものである。

- 1E2-11
- 星のリリィ
〇小木曽 直輝(岐阜大学)、阪井 啓紀(岐阜大学)、野倉 大輝(岐阜大学) - IVRCチャレンジ枠。<#%BR%#>フェイストラッキングによりモニターの画面が動く擬似VRにより体験者はモニターに向かって口を大きく開け見回すことで、周りの敵キャラクターたちを吸い込むことができる。さらに、吸い込んだ敵キャラクターの能力に応じて、体験者が手に持つ「魔法のステッキ」は見た目と能力が変化し、振ることで攻撃を行うことができる。

- 1E2-12
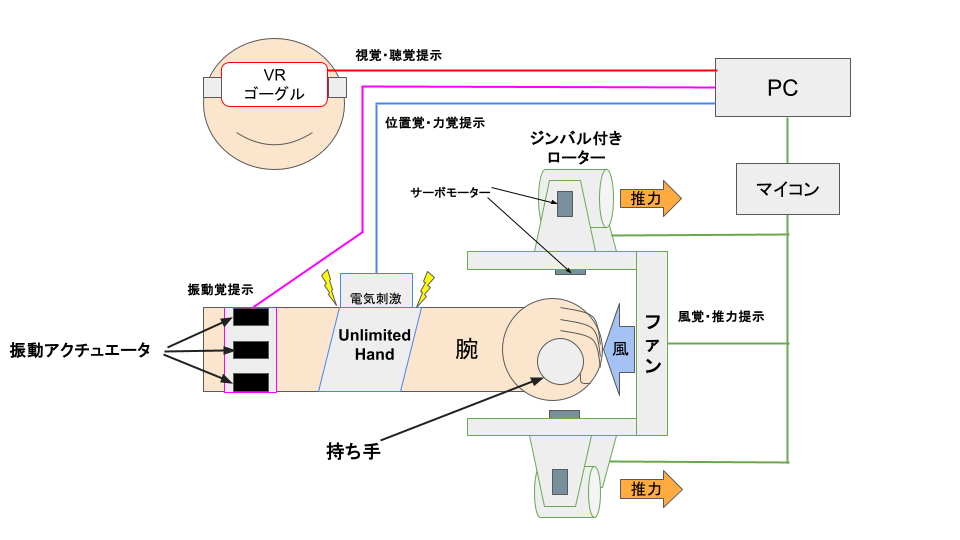
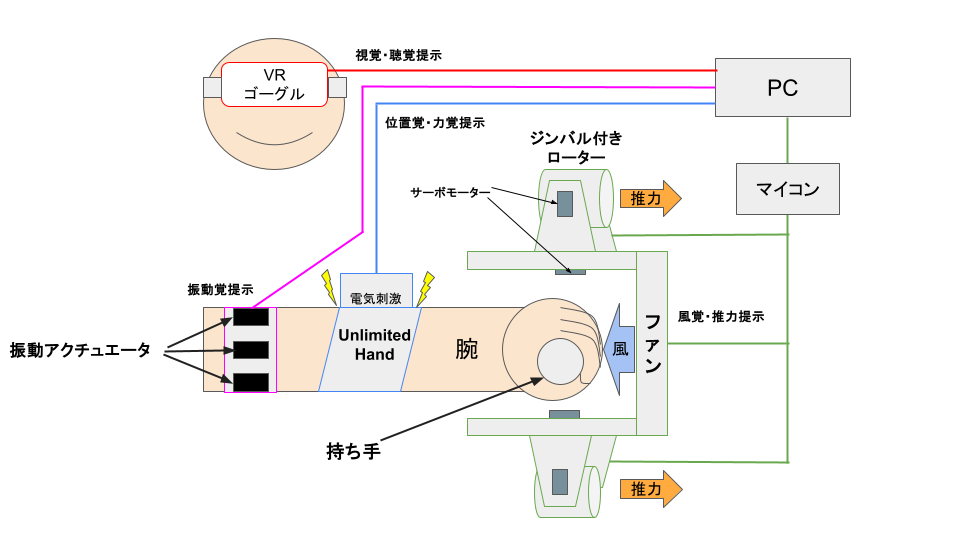
- 飛んでけ鉄拳!Rocket Puncher
〇磯本 惣太郎(東京農工大学)、藤野 創(東京農工大学)、岩永 将樹(東京農工大学)、張替 琢生(東京農工大学)、赤塚 悠斗(東京農工大学)、向原 蒼葉(東京農工大学) - 本企画では自分自身の体から切り離された腕がロケットの様に飛んで行く感覚を再現し,その腕を操作し標的に当てる体験を提供する.体験者はHMDによる視聴覚提示,前腕部に装着したファンとマルチローターによる推力・風覚提示,振動アクチュエーターによる振動覚提示,FESによる筋収縮を使った位置覚・力覚提示によって腕が飛翔する感覚を擬似的に体験する.
OS展示11:00-12:30、16:00-17:20
ハプティック・フューチャー・ギャラリー
- 1OSE
- ハプティック・フューチャー・ギャラリー
一條 暁生(東北大学)、昆陽 雅司(東北大学)、加藤 明樹(東北学院大学)、佐瀬 一弥(東北学院大学)、永野 光(京都工芸繊維大学)、田所 諭(東北大学)、太田 貴士(東京大学)、雨宮 智浩(東京大学)、葛岡 英明(東京大学)、青山 一真(群馬大学)、森崎 汰雄(NTTコミュニケーション科学基礎研究所)、〇吉元 俊輔(大阪大学)、蜂須 拓(筑波大学)、田辺 健(産業技術総合研究所) - ハプティクスに関する研究では,実際に触れることによってその真価を理解することができる場合も少なくない.今年度は,当研究会の研究発表賞を受賞した研究,研究委員会による推薦を得た研究,触覚若手の会による推薦を得た研究を選出し,VR学会大会にて展示を実施する.特に若手を中心とした展示者が様々な世代の体験者との議論を通して見識を拡げる機会となり,今後のハプティクス分野のさらなる発展につながることを目指す.

技術・芸術展示コアタイム12:40-14:20
(終日展示可能)
- 1G-01
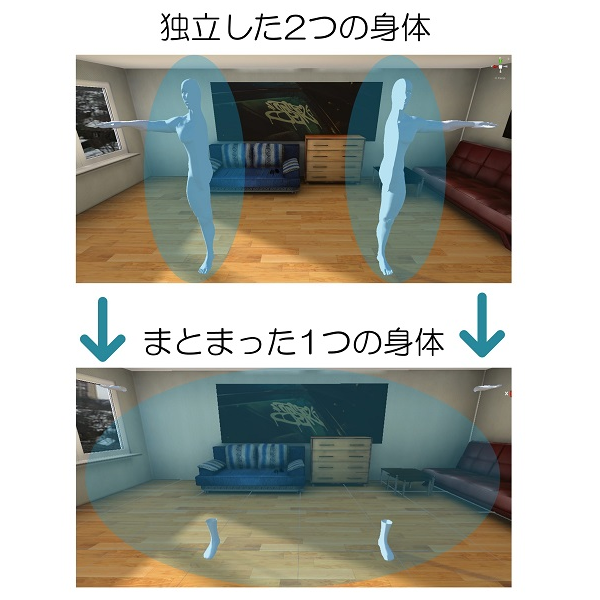
- Invisible Split Body:手足のみの透明身体を用いた1つの身体として知覚される範囲の拡張
〇近藤 亮太(東京大学)、廣瀬 通孝(東京大学) - 分裂した半身の位置を操作することで,自己位置を拡張できる。しかし,多くの体験者が近い距離での分裂以外のレイアウトでは,独立した2つの身体として知覚していた。2つの身体の所有感は,1つのよりも弱いことがわかっている。そこで本研究では,参加者の補完によって全身を知覚する手足のみの透明身体を用い,様々なレイアウトにおいても1つのまとまった身体として知覚させ,身体所有感を維持する方法を提案する。
- 1G-02
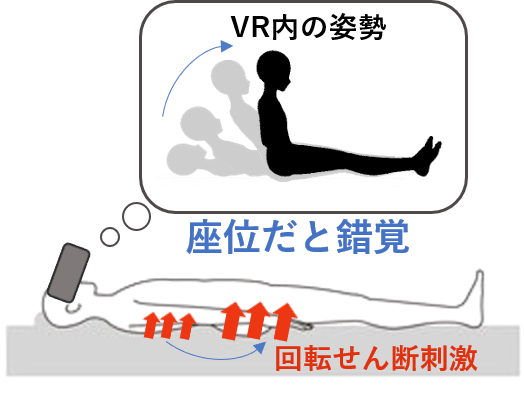
- 仰臥位のVRユーザに対する姿勢錯覚を誘発可能な回転せん断刺激提示ベッド型システムの基礎検討
〇岩崎 晃大(奈良先端科学技術大学院大学)、平尾 悠太朗(奈良先端科学技術大学院大学)、萩森 大貴(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、堀江 新(慶應義塾大学大学院メディアデザイン研究科)、清川 清(奈良先端科学技術大学院大学) - 仰臥位をVR体験に活用するためには,仰臥位のままで立位を認知させる感覚を提示することが課題である.そこで本研究では,仰臥位から立位への遷移を模倣した視触覚刺激を提示することで立位錯覚を誘発し,姿勢認知を一致させることを試みる.触覚刺激には回転せん断刺激を用いる.本稿では,仰臥位から立位への姿勢遷移の第一歩として,仰臥位から座位までの姿勢錯覚を誘発するために試作したベッド型システムについて報告する.
- 1G-03
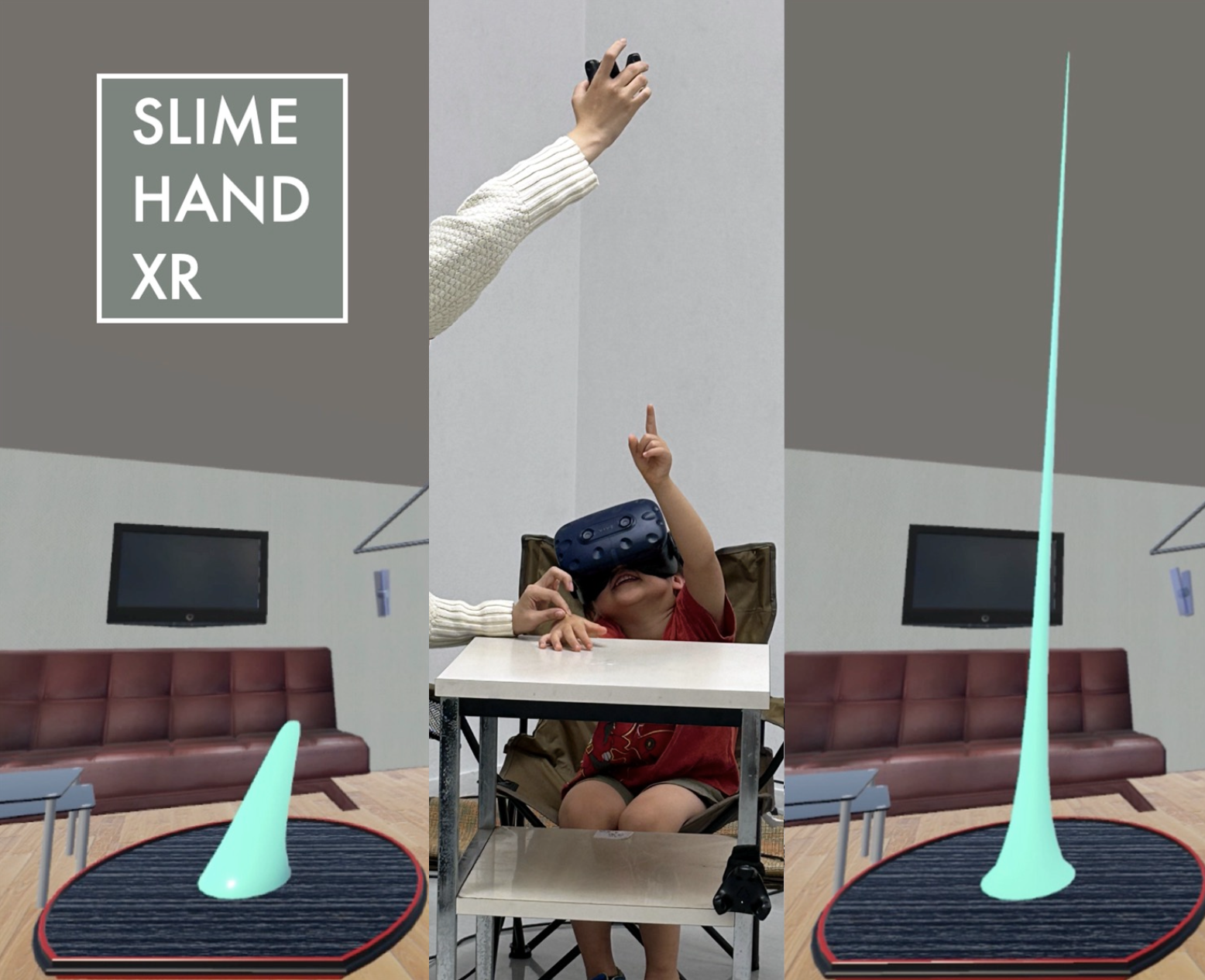
- Slime Hand XR -HMD空間における皮膚変形錯覚の設計-
〇佐藤 優太郎(名古屋市立大学大学院)、伊藤 杏(名古屋市立大学大学院)、元橋 洸佐(名古屋市立大学大学院)、鈴木 剛(保与堂)、小鷹 研理(名古屋市立大学大学院) - スライムハンド錯覚は皮膚の過剰な変形感覚が生起する身体錯覚である。この錯覚を仮想空間上で設計することにより、実空間上の錯覚誘導よりも自在な皮膚形状の知覚が可能となる。本研究では、HMD空間上のCGによるスライムの描写においても、錯覚効果が再現されるかどうかを検証した。主観評価の結果から、仮想空間上においてもスライムハンド錯覚の効果は再現された。さらにはCGを用いることでより自在な皮膚変形が実現した。
- 1G-04
- 多点触覚デバイスの検討
〇鄭 竣勻(東京工芸大学)、曽根 順治(東京工芸大学)、大田原 佑哉(東京工芸大学)、崔 通(東京工芸大学)
- 1G-05
- 取り下げ
- 1G-06
- おとひふ:音を使った肘皮膚の変形錯覚
〇髙橋 奈里(名古屋市立大学大学院)、佐藤 優太郎(名古屋市立大学大学院)、小鷹 研理(名古屋市立大学大学院) - スライムハンド錯覚は、選択的に皮膚イメージを変調させることができる錯覚である。我々は、錯覚が生起する理由として、皮膚が空間的な位置センサを持たない組織であることを挙げている。今回は、位置を視覚でなく、聴覚である音で示すことによっても、皮膚イメージの変調感覚を生起させることができるのか、アンケート調査を行い検証した。その結果、音の周波数の高低で遠近感を表現することで、主観的な皮膚の伸長感が得られた。
- 1G-07
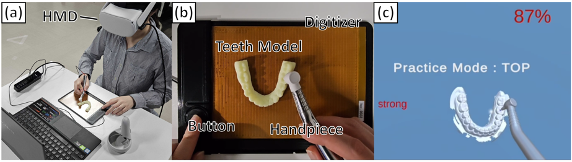
- 電磁誘導計測式ハンドピースデバイスと歯列モデルを用いた小型XR歯科切削訓練システム
王 宇卉(東北大学)、〇高嶋 和毅(芝浦工業大学)、伊藤 雅充(株式会社ワコム)、小堀 武(株式会社ワコム)、朝倉 僚(株式会社ワコム)、藤田 和之(東北大学)、洪 光(東北大学)、北村 喜文(東北大学) - 既存のXR技術を用いた歯切削訓練システムは触覚デバイスを用いるものが多く,全体的にシステムのサイズやコストが大きくなりがちである.そこで本研究では,3Dプリンタで印刷した歯列モデルに直接ハンドピースを当てるパッシブハプティクスのアプローチでその課題の解決を図る.それを活かすために,まず電磁誘導方式を用いて歯周辺で高精度なトラッキングが可能なトラッキングプラットフォーム(デジタイザとハンドピース型デバイス)を開発し,高精度なハンドピース操作を可能とした.また,それらの計測情報をHMD内でVRとして強化表現することで,リアルで臨場感のあるVR歯切削体験を実現した.本技術展示では,そのような小型で低コストなXR歯切削訓練システム
- 1G-08
- XRAYHEAD GARDEN
〇小鷹 研理(名古屋市立大学)、中山 愛唯(名古屋市立大学) - 我々の研究グループは、これまでに、ハーフミラーによって仕切られた二つの空間の光量を調整することによって、身体の一部が透過し、その中に任意のオブジェクトを定位可能な視触覚錯覚システムを発表してきた(XRAYSCOPE、XRAYHEAD)。本発表では、既存の頭部の透視・透触錯覚装置を拡張し、頭蓋骨の内部に侵入した実験者の手によって内部をまさぐられる感覚、および頭内にモノが置かれたままとなる感覚を与えるXRAYHEAD GARDENの展示を行う。

- 1G-09
- Drummed Head:HMD空間における頭部の中動態的な離脱体験
〇加賀美 果歩(名古屋市立大学大学院)、鈴木 剛(HOYODO)、小鷹 研理(名古屋市立大学大学院) - 本研究では、HMDを用いて頭部離脱を体験できるシステムを構築した。身体の最小単位としての頭部に着目し、頭部の着脱をトリガーとした身体所有感を生起させることを目的としている。HMDを装着した体験者が太鼓を逆さまにして机に叩く動作を行うと、それに伴いアバターの頭が吹っ飛ぶことで、自分の頭が吹っ飛んだような感覚が得られる。その感覚に対し主観評価を行ったところ、85%が肯定的であった。

- 1G-10
- 物体の持ち下げを主体とした動作における重量知覚Pseudo-haptics手法の提案
〇島村 一輝(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - Pseudo-hapticsと呼ばれる触覚提示技術を用いた重量提示手法が注目を集めている.一方で,そのほとんどが物体の持ち上げ時に重量提示するものであり,物体を持ち下げる動作によって重量提示可能であるかは明らかでない.我々は従来手法の持ち下げ動作における有効性を検証した後,新たに考案した持ち下げ動作時の重量提示手法の効果について検証する実験を行った.その結果,提案手法の一定の有用性が示された.
- 1G-11
- 取り下げ
- 1G-12
- 歩行の移動量操作によるPseudo-hapticsを用いた風速知覚の増強
〇鷹觜 慧(東京大学)、伊東 健一(Diver-X 株式会社)、細井 十楽(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - ファンによる強風提示では装置の大型化等が問題となる。本研究は、この課題に対しPseudo-hapticsを用いて実際の風を強く知覚させることを提案する。検証のため、VR環境で小型ファンの風を提示し、風速とpseudo-hapticsを変化させた。一部の条件で風と同方向の力錯覚により風が強く知覚される傾向があった。この結果から、風による抗力がpseudo-hapticsで強く知覚されたと推測される。
- 1G-13
- エージェントの表情により生起する力覚の物理量による定量化
〇亀岡 嵩幸(筑波大学)、松山 菜々(筑波大学)、松田 壮一郎(筑波大学)、蜂須 拓(筑波大学) - これまでに我々はディスプレイとマウスで構成された人とエージェントとのインタラクティブシステムにおいて,エージェントの表情がネガティブに変化するとニュートラルな表情と比べて大きい力覚が生起することを示した.本稿では,この力覚を物理量による定量化のため力提示装置を導入した心理物理実験について報告する.
- 1G-14
- 取り下げ
- 1G-15
- 癒し体験:VR/ARエージェントによる心地よい「話しながらなでる」動作
〇新江田 航大(奈良先端科学技術大学院大学)、澤邊 太志(奈良先端科学技術大学院大学)、神原 誠之(奈良先端科学技術大学院大学、甲南大学)、加藤 博一(奈良先端科学技術大学院大学) - ロボットによる「話しながらなでる」動作は人の快感情を増加させ痛みを軽減する効果が確認されている.しかし,人間の感覚は90%以上が視覚情報であるため,どのような人が,どのように「話しながらなでる」かによって,快感情や痛み軽減効果に変化があると考えられる.本研究では,VR/AR環境で人型エージェントによる「話しながらなでる」システムを開発する.このシステムは触覚,聴覚,視覚を統合した上質な心地よい体験を提供する.
- 1G-16
- 映像に基づく運動体感の自動生成に関する研究 第3報:逆動力学による力推定に基づく体感振動の提示
〇赤井 崚真(東北大学)、昆陽 雅司(東北大学)、田所 諭(東北大学) - 本稿では映像内の人物の動作により生じる力に基づいて振動刺激を自動生成し,力に応じて生成した振動刺激が運動体感に一致するかを確かめる.姿勢推定ライブラリを用いて人物の骨格を追い,逆動力学を用いて関節に生じる力を推定する.力を知覚インテンシティに対応付け,振動刺激を生成する.被験者実験で他の変数に基づいて生成した振動刺激と比較し,提案手法の有効性を検証する.
- 1G-17
- 情動体験を拡張する疑似心拍振動提示システム(第4報):eスポーツプレイヤの存在感増強を目指した生理反応の提示
〇森 理樹(筑波大学)、高田 崇天(筑波大学)、梶浦 雅之(筑波大学)、ハサン モダル(筑波大学)、蜂須 拓(筑波大学) - 我々はこれまでに,リモートコミュニケーションにおける社会的信号の触覚的伝達を目的に,感情の時間的変化(情動)を想起させる人工的な心拍を模した振動刺激(疑似心拍振動)の設計に取り組んできた.本発表では,eスポーツにプレイヤの存在感の増強を目指し,生理反応を計測して疑似心拍振動によって遠隔のプレイヤに実時間で相互に伝達するシステムの設計について報告する.
- 1G-18
- 動作変換とその重ね合わせによる動物キャラクタアニメーションの作成
〇山口 周(東京大学)、畑田 裕二(東京大学)、鳴海 拓志(東京大学) - ヒトとは異なる身体構造を持つ動物等のキャラクタのアニメーションは様々な映像媒体で活用されているが,モーションキャプチャのような手軽な作成方法が少ない.本研究では,ユーザの身体動作をキャラクタの特定の身体部位の動作に変換して割り当てたアニメーションを作成でき,それらのアニメーションを重ね合わせることで,複雑なキャラクタアニメーションを手軽に作成できるツールを提案する.ユーザスタディの結果,参加者は概ね10分以内に動物キャラクタの全身アニメーションを作成できた.
- 1G-19
- 陶芸における身体動作の特徴抽出を目的としたFMGシステム〜ハードウェアの基礎検討〜
〇三堀 二知加(慶應義塾大学)、南澤 孝太(慶應義塾大学)、堀江 新(慶應義塾大学) - 身体動作の特徴抽出において筋活動計測が用いられており、その際にはEMGを用いることが一般的である。しかし、装着の複雑さや発汗による皮膚インピーダンスの変化が計測に影響を与えることから、使用シーンが限定的である。FMGを用いた筋活動計測は装着が容易であり、発汗や接触の影響を受けづらいことが報告されている。本研究では陶芸の技能に着目し、FMGによって筋活動の計測を行うシステムを開発し、実際の現場での運用を行った。

- 1G-20
- 取り下げ
- 1G-21
- ブランコ型VRでの体の支持条件が揺動感覚に与える影響の分析
〇潘 虹羽(立命館大学)、安藤 潤人(立命館大学)、李 亮(立命館大学)、野間 春生(立命館大学) - 現在、VR酔いの現象が課題となってきている。本研究ではVR酔いを引き起こす一つの原因と考えられる揺動感覚に着目し、同じコンテンツであっても体験方法の違いが揺動感に及ぼす影響を検証した。先行研究ではブランコ型のVRの体験時に足の接地有無で揺動感覚が大きく変わるという現象を評価した。本報告ではその要因を探ることを目的として、杖や手すりなどの異なる体験条件下で実験を行い、それぞれの揺動感覚を比較評価した。

- 1G-22
- 多様な姿勢に対応したワイヤレス足裏振動デバイスによるバーチャル歩行体験
〇中村 純也(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - 本発表では、バーチャル歩行体験を実現するワイヤレス足裏振動デバイスを開発した。このデバイスは、振動子と圧力センサによるバーチャル歩行の制御とフィードバックを提供する。前足部と踵部の振動子は、歩行に同期して足裏への振動を提示し、歩行する地面質感に応じた振動を提示する。6つの圧力センサは、足裏の荷重変化を捉え、歩行方向を制御する。ユーザーは立位や座位、仰向け姿勢など身体的制約に左右されず体験できる。

- 1G-23
- Tape-ticsを用いた新たな触覚ツールキットの開発と応用
〇パニアグア カルロス(奈良先端科学技術大学院大学)、太田 裕紀(奈良先端科学技術大学院大学)、平尾 悠太朗(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - 「Tape-tics」は、柔軟なフレキシブル基板に小型振動子を配列したテープ型デバイスである。任意の長さに切り取り、任意の場所に貼り付けることができ、特定の部位に合わせた設計や複雑な配線が不要である。開発したGUIコントローラを用いて、任意の触覚表現をプログラムすることが可能。さらに、マイクロコントローラに様々なセンサーを組み合わせることで、多様な用途に対応できる。本論文では、このTape-ticsを用いたさまざまな応用例を紹介する。

- 1G-24
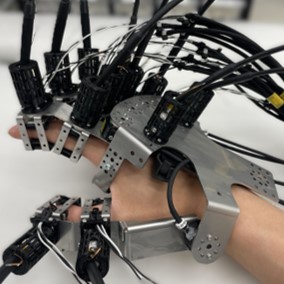
- Motion-Less VRの研究:五指・多自由度運動の実現に向けた基礎開発
〇望月 典樹(日本工業大学) - Motion-Less VRは、実身体の運動を必要としないVRシステムである。このシステムでは、固定された実身体の関節トルクを計測し、動力学に基づいてバーチャル身体の運動を生成し、その結果を感覚器にフィードバックする。これにより、実環境による空間的・物理的な制約を受けずにバーチャル身体の操作が可能となる。本研究では、五指の屈曲・伸展および内転・外転運動を可能とするシステムの開発を行う。
- 1G-25
- 馬の視野角を魚眼カメラを用いてリアルタイムに体験するHMDデバイスの開発
〇齋藤 達也(東京工芸大学)、高村 環(東京工芸大学)、阿部 一直(東京工芸大学) - 本研究では、馬の視野を体験できるHMDデバイス『U-HMD』を提案する。デバイスの左右に2台の魚眼カメラを取り付け、映像を体験者の両眼に提示することで、馬の視野体験を試みる。デバイスの設計には3Dプリンタを用いており、本発表ではリアルな馬型の外装の制作方法も紹介する。また、U-HMDを装着することで、馬の視野の特徴を体験できるかどうかを調査・実験した。

- 1G-26
- 高松塚古墳のデジタル再現と理解支援のためのMRコンテンツ
〇宋 文澤(関西大学)、林 武文(関西大学) - 本研究では,特別史跡の高松塚古墳とその中にある壁画の理解支援を目的として,MRシステムを開発した.体験者はハンドトラッキングを通じて,直観的な操作感覚で壁画を鑑賞し,さらに懐中電灯のインターフェースを開発し,体験者が発掘時の壁画と復元図を同時に観察し見比べることを可能にした.また,天井にある壁画を鑑賞する際の身体負担を軽減する方法も提案した.

- 1G-27
- 生活ログに合わせて動く筆記用具を用いたプレイフルなリフレクション手法「カロモン」の提案
〇大平 桜子(法政大学)、中西 ゆき菜(法政大学)、松浦 奏都(法政大学)、中條 麟太郎(東京大学 大学院学際情報学府)、矢作 優知(東京大学 大学院学際情報学府、日本学術振興会特別研究員DC)、松井 克文(東京大学 産学協創推進本部)、ソン ヨンア(法政大学) - 生活ログの可視化によりリフレクションを支援するデジタルツールが普及しているが、その多くは定量的かつ一方的な情報提供に偏重している。本研究では、デジタルツールを用いた、オルタナティブなリフレクションの可能性を探索することを目的とする。計算機と協働して身体的にリフレクションを行う手法として、生活ログに合わせて物理的に動く筆記用具を用いて、ユーザ自身が生活のログをプレイフルに描画する活動を提案する。

- 1G-28
- VRにおけるテレキネシス感を表現するシステムの構築と評価
廣田 雄大(電気通信大学)、〇中谷 信吾(電気通信大学)、櫻井 翔(電気通信大学)、野嶋 琢也(電気通信大学)、広田 光一(電気通信大学) - テレキネシスは,遠隔にある物体を直接触れずに操作できる能力である.フィクション作品では,テレキネシス使用者は,手等に力を込めて対象を思い通りに操作する描写が見られる.作品の描写からは、物体に触れているわけではないにも関わらず、対象に対する行為主体感を伴っていると予想される.本研究では,VRテレキネシス体験手法を構築し,テレキネシスを体験しているような身体感覚や行為主体感を得ることができるか調査した.
- 1G-29
- 生活を映す分身植物との共同生活に向けたデータマッピング手法の開発
〇PENG HANRUI(慶應義塾大学大学院メディアデザイン研究科)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、Zhou Songchen(慶應義塾大学大学院メディアデザイン研究科)、Liu Tianqi(武蔵野美術大学)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 本研究では、個々の日々の行動と生理反応をデータ化し、自身の生活リズムと同調して成長する分身植物を提案する。このアプローチにより、異なる時間軸のデータを統合し、それに基づいて個人の生活パターンを反映する分身植物を生成する。このシステムは、個人が自らの行動をリアルタイムで視覚化することで、より深い自己理解と自己認識を支援するものである。

- 1G-30
- 星のリリィ
〇小木曽 直輝(岐阜大学)、阪井 啓紀(岐阜大学)、野倉 大輝(岐阜大学) - IVRCチャレンジ枠。<#%BR%#>フェイストラッキングによりモニターの画面が動く擬似VRにより体験者はモニターに向かって口を大きく開け見回すことで、周りの敵キャラクターたちを吸い込むことができる。さらに、吸い込んだ敵キャラクターの能力に応じて、体験者が手に持つ「魔法のステッキ」は見た目と能力が変化し、振ることで攻撃を行うことができる。

- 1G-31
- 飛んでけ鉄拳!Rocket Puncher
〇磯本 惣太郎(東京農工大学)、藤野 創(東京農工大学)、岩永 将樹(東京農工大学)、張替 琢生(東京農工大学)、赤塚 悠斗(東京農工大学)、向原 蒼葉(東京農工大学) - 本企画では自分自身の体から切り離された腕がロケットの様に飛んで行く感覚を再現し,その腕を操作し標的に当てる体験を提供する.体験者はHMDによる視聴覚提示,前腕部に装着したファンとマルチローターによる推力・風覚提示,振動アクチュエーターによる振動覚提示,FESによる筋収縮を使った位置覚・力覚提示によって腕が飛翔する感覚を擬似的に体験する.
OS14:30-15:50
テレイマージョン×生成AI
- OS1A4
- テレイマージョン×生成AI
〇小木 哲朗(慶應義塾大学)、宮地 英生(東京都市大学)、江原 康生(大阪電気通信大学)、石田 智行(福岡工業大学)、伊藤 研一郎(東京大学)、矢向 高弘(慶應義塾大学)、山尾 創輔(富士通株式会社) - 生成AIが注目されている昨今,ビジネスやエンターテインメントなどさまざまな分野での活用が進んでいる.テレイマージョン技術研究委員会のメンバーにおいても,生成AIを活用したアバタ生成等の研究を行っており,本OSではAIに精通されている研究者をお招きし,これら技術の現在の取り組みや今後の展望について議論する.
OS14:30-15:50
Project Cybernetic being 2020-2024
- OS1B4
- サイバネティック・アバターの認知神経科学的展開
南澤 孝太(明治大学)、嶋田 総太郎(明治大学)、柴田 和久(理化学研究所)、平田 仁(名古屋大学)、温 文(立教大学)、脇坂 崇平(慶應義塾大学)、〇畑田 裕二(東京大学) - ムーンショット型研究開発事業・目標1「身体的共創を生み出すサイバネティック・アバター技術と社会基盤の開発(Project Cybernetic being)」では、人々の身体的経験や技能をネットワーク上で流通・共有し、障害当事者や高齢者を含む多様な人々が自在に行動し社会参加できる未来社会を目指して、身体能力の限界を突破するサイバネティック・アバター(CA)技術の研究開発と社会実装に取り組んでいます。本OSでは、特に認知神経科学的手法を用いたCA研究に焦点を当て、今後の研究展望について議論を行います。
OS14:30-15:50
企業研究所で活躍する触覚研究者
- OS1C4
- 企業研究所で活躍する触覚研究者
半田 拓也(NHK放送技術研究所)、小玉 亮(豊田中央研究所)、江口 僚(サイバーエージェント AI Lab)、〇吉元 俊輔(大阪大学)、蜂須 拓(筑波大学)、佐瀬 一弥(東北学院大学)、田辺 健(産業技術総合研究所)、雨宮 智浩(東京大学) - 近年のハプティクス分野では,大学や公的研究機関の研究者のみならず,企業の研究者の活躍が華々しい.そこで,本OSでは,企業研究所に所属する若手からベテランまでの3名の触覚研究者に,企業ならではの研究や大学との違いをご講演いただく.本OSを通して,学生や若手研究者にとってのキャリアパス選択の一助となり,大学等の研究者にとっては,学術界と産業界の橋渡しのきっかけなることを目指す.

OS14:30-15:50
高齢者の生活・医療を支えるVR
- OS1D4
- 高齢者の生活・医療を支えるVR
〇上田 一貴(東京大学大学院)、橋本 尚久(産業技術総合研究所)、蔵田 武志(産業技術総合研究所)、吉岡 京子(東京大学大学院) - 急激な少子高齢化の進行に伴い,高齢者の支援は喫緊の課題となっている.本学会の「超高齢社会のVR活用研究委員会」は,高齢者の生活の質を向上させるVR技術の開拓と普及を目指して活動している.今回のオーガナイズドセッション「高齢者の生活・医療を支えるVR」では,移動支援,遠隔ヘルスケア,地域看護教育に関する講演を通じて,高齢者の生活や医療におけるVR技術の可能性を議論する.
OS14:30-15:50
メディアアートの遺し方・伝え方
- OS1E4
- メディアアートの遺し方・伝え方
柴﨑 美奈(東京都立大学)、山岡 潤一(慶應義塾大学大学院)、〇吉田 成朗(オムロン サイニックエックス)、阪口 紗季(東京都立大学)、土田 修平(お茶の水女子大学)、韓 燦教(東京大学)、クワクボ リョウタ(情報科学芸術大学院大学) - VRやAIといったテクノロジーを使った作品は一見、再現性が高いようで、作者の意図やコンテクストまでを保存するにはまだまだ難しい。一世紀前の絵画のように次の世代へ作品を残すにはどういう形が適切なのか。また、VR作品を制作していると、なぜ現物が良いのかというアナログや実空間の良さも浮かび上がる。AIの出現など新たな技術とアーティストはどのように向き合い、新しいクリエイティビティをどのように見つけ伝えていくか。そんな話をメディアアーティストを迎え、若手研究者と共に議論する。
OS16:00-17:20
他者のリアリティ
- OS1A5
- 他者のリアリティ
〇北崎 充晃(豊橋技術科学大学)、濱田 健夫(東京大学)、佐藤 德(富山大学)
OS16:00-17:20
メタバースフィールドラボ構想
- OS1C5
- メタバースフィールドラボ構想
〇近藤 亮太(東京大学)、櫻田国治(東京大学、慶應義塾大学)、小柳 陽光(東京大学、株式会社HIKKY)、廣瀬 通孝(東京大学)、三浦 慎平(株式会社博報堂DYホールディングス)、エンジンかずみ - メタバースはVRの要素技術に加え,高度な社会性を持つ。多くのユーザがメタバースで長い時間を過ごし,様々なアバタ・空間を通じて生活している。彼らはどのような考えや価値観を持ってメタバースで活動しているのだろうか。本OSではメタバースを社会として捉え,それを調査するための空間,メタバースフィールドラボの構想と現在までの取り組みを紹介する。