Sept. 13 2024
9月13日
口頭発表 09:30-10:10 触覚3
座長:湯川 光(名工大)
- 3C1-01
-
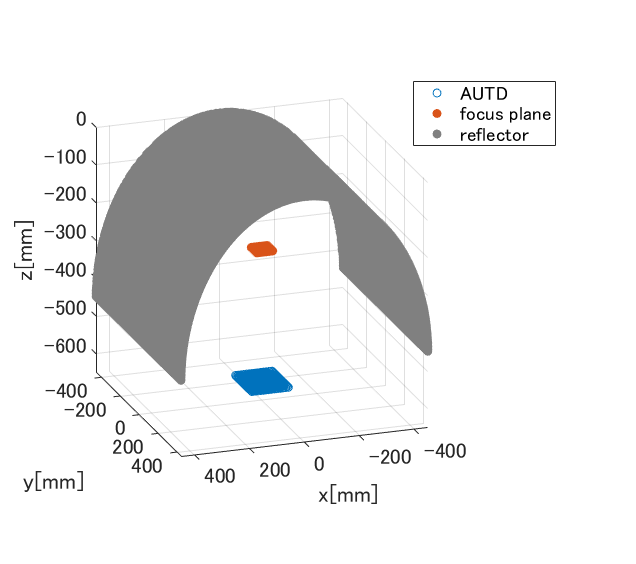
円筒型反射体を用いた空中超音波触覚提示の検証
〇池本 開(東京大学)、大谷 浩太郎(東京大学)、有賀 健太朗(東京大学)、松林 篤(東京大学)、牧野 泰才(東京大学)、篠田 裕之(東京大学) - 本研究では, 円筒型反射体を用いた触覚提示に必要な超音波の位相補正理論とそれを用いた検証結果を述べる. 反射波の収束には, 反射波の位相を揃えるように初期位相を決める必要がある. レンズの公式を円筒湾曲方向に適用し, さらに円筒高さ方向の位置関係から仮想音源の座標を求めることで位相補正を行った. その理論を用いた検証により, 焦点形成面における任意の箇所に焦点を形成できることが確認できた.
- 3C1-02
-
外界を表現する立体振動ディスプレイ 第10報:胴体装着型立体振動デバイスの定位精度評価
〇大原 玄(東北大学)、昆陽 雅司(東北大学)、田所 諭(東北大学) - 立体振動は,外界の振動源を定位させる,従来のファントムセンセーションによる定位を革新する振動触覚技術である.これまでに前腕や足裏の立体振動デバイスを開発したが,定位が装着部位周辺や床面上に限られ,身体周辺を上下左右に定位させることは難しかった.そこで我々は身体周辺を表現するために胴体装着型の振動デバイスを開発し,立体振動のアルゴリズムで駆動した場合の定位精度を測定しその有効性を報告する.

- 3C1-03
-
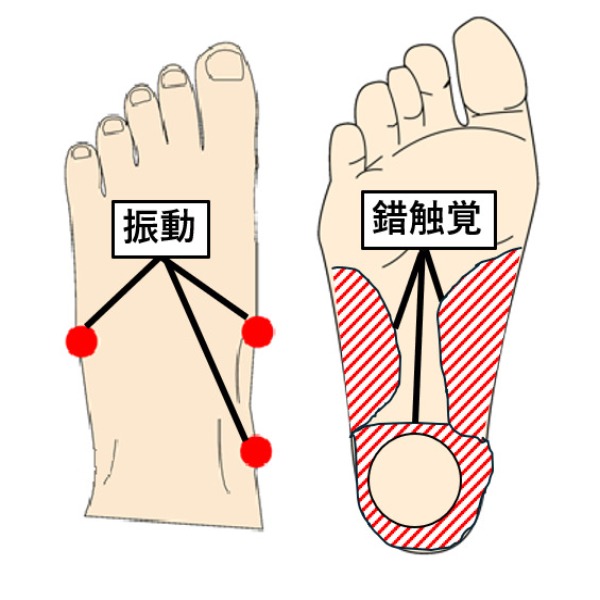
足背部・足根管部への振動刺激による中足部・後足部への足底錯触覚提示
〇鳥谷部 孝大(筑波大学)、橋本 悠希(筑波大学) - 我々は,足背側に振動刺激を加えることにより,足底でその振動を知覚する足底錯触覚提示手法を用いて,歩行時に本来の地面環境を阻害せずに新たな触覚を重畳する取り組みを行っている.これまでの研究では,前足部の広範囲で本錯触覚の生起が確認されているが,中足部および後足部への範囲拡大が課題であった.本稿では,足背部および足根管部への振動刺激に対する本錯触覚の生起有無を検証し,中足部および後足部に対する足底錯触覚提示の可能性について報告する.
- 3C1-04
-
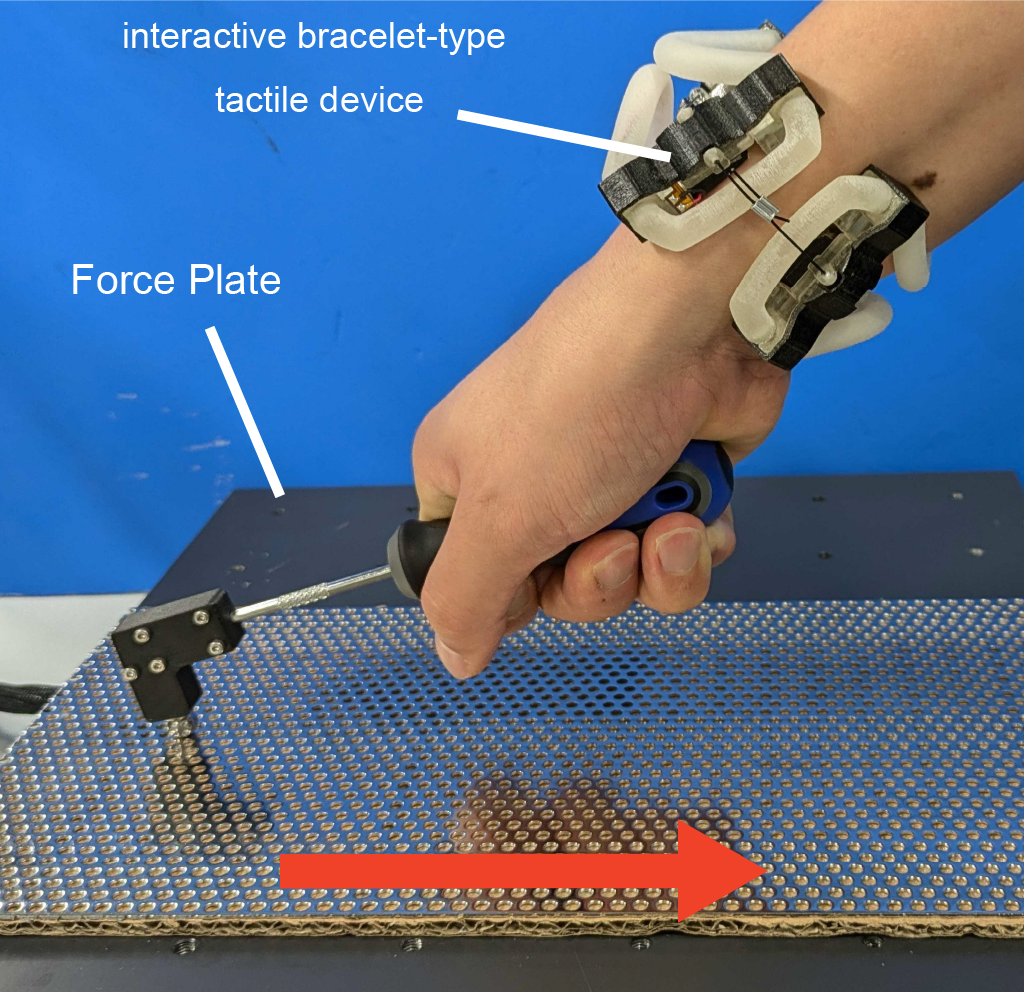
振動分布を再現する腕輪型触覚デバイスによる動作体感の伝達ー第10報:手指伝播特性に基づく個人差補正法を利用した2者間の動作再現
〇新居田 崇家(東北大学)、松原 亨(東北大学)、和賀 正宗(東北大学)、昆陽 雅司(東北大学)、田所 諭(東北大学) - 我々は,これまでに手首に伝わる振動を計測・提示する腕輪型触覚デバイスを提案している.前報では力加減を統制することで,手指伝播特性に基づく個人差補正法が有用である可能性を報告した.本報では,2者間の動作再現において,個人差補正法を適用することで被験者が目標の動作タスクの力加減を上手く再現することができるかについて検証する.
- 3C1-05
-
呼吸運動を模した空中超音波刺激による仮想的な動物とのインタラクション
〇細井 十楽(東京大学)、金 杜(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - 動物とのインタラクションはアニマルセラピーや教育等の観点から需要が大きい。一方で、実際の動物との触れ合いは、アレルギーや外傷との危険性、倫理性の観点から制約がある。本研究では、非接触に触覚刺激を提示可能な空中超音波刺激を用いた仮想的な動物とのインタラクション体験において,呼吸運動を模擬した視触覚刺激を提示することを提案した.猫とのインタラクションを行う実験によって,猫の呼吸運動を視触覚的に提示することで,猫の生き物らしさについての主観評価が向上することを確認した.
- 3C1-06
-
振動・熱刺激を用いたしびれ感覚の提示による衝撃感の向上
〇藤田 光(東京大学)、細井 十楽(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - VRにおいて衝撃感提示に関する多くの研究が行われてきたが,衝撃後の残効に関する研究は少ない.本研究では,残効の一つであるしびれ感覚を再現する振動・熱提示の効果を調査する.野球の打撃を再現した仮想環境と振動・撃力・熱提示が可能なデバイスを作成し,実験を実施した.結果,振動・熱提示がしびれ感覚を再現し,衝撃感を向上させることが確認された.特に高周波の振動がしびれ感覚と衝撃感のリアリティ向上に有意に作用した.

- 3C1-07
-
デジタル空間における複数人触覚インタラクションに向けた間主観性デザインの基礎検討 ~他者の身体への視覚的介入~
〇森田 迅亮(慶應義塾大学大学院メディアデザイン研究科)、パーソン タナー(慶應義塾大学大学院メディアデザイン研究科)、梅原 路旦(慶應義塾大学大学院メディアデザイン研究科)、脇坂 崇平(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科)、堀江 新(慶應義塾大学大学院メディアデザイン研究科) - 現実空間において対象物を通じて触覚のやり取りを行う際,人は他者の意図や感覚を的確に読み取ることができる.一方で,デジタルな空間においては他者の感覚を保証する物理的な制約が存在しないため,他者の感覚状態を推定することは困難である.そこで本研究では複数の主体がXR空間で触覚インタラクションを行う際の体験設計として間主観性デザインを提案し,それを適用した体験の基礎的な検討を行う,特に,相手の身体上に視覚的な表現を加えることによって自己が物体から受ける感覚が変化するかを評価する.

- 3C1-08
-
テレロボットにおける安定した物体把持のための回転中心とモーメントの推定
〇街道 一翔(立命館大学)、柚 空翔(立命館大学)、安藤 潤人(立命館大学)、寒川 雅之(新潟大学)、野間 春生(立命館大学) - 本研究では,テレロボットの物体把持状態を検出して操作者に伝えることを目的とし,圧力と剪断力を計測可能なMEMS触覚センサを4つ用いた,センサの出力から回転中心とモーメントを推定可能なマイクロフォースプレートを開発した.評価実験ではフォースプレート上のある点を中心に回転をかけ回転中心を推定した.実験の結果,フォースプレートの中央付近の回転中心において推定値との誤差は0.7 cmとなり比較的正確に推定できた.
- 3C1-09
-
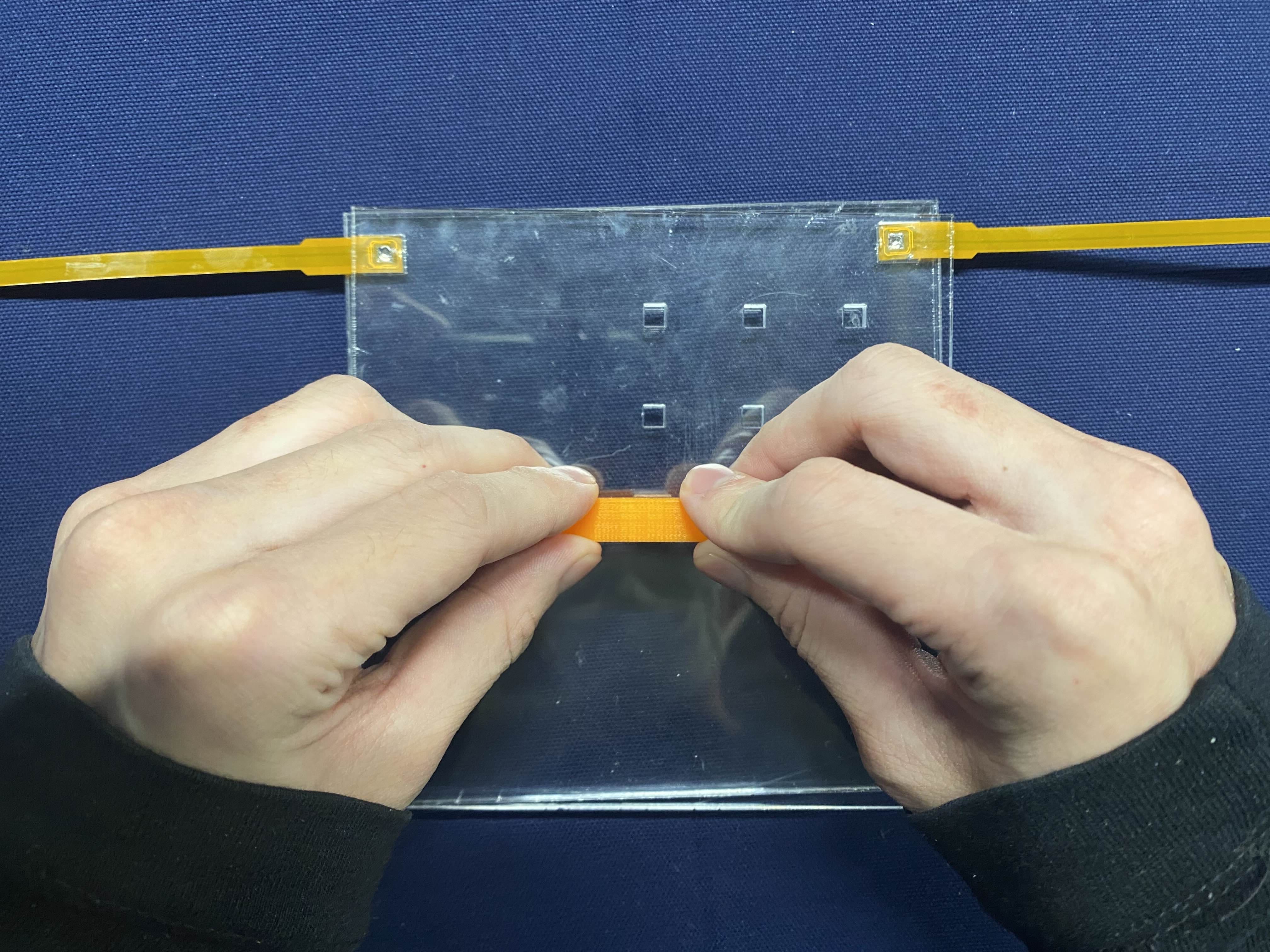
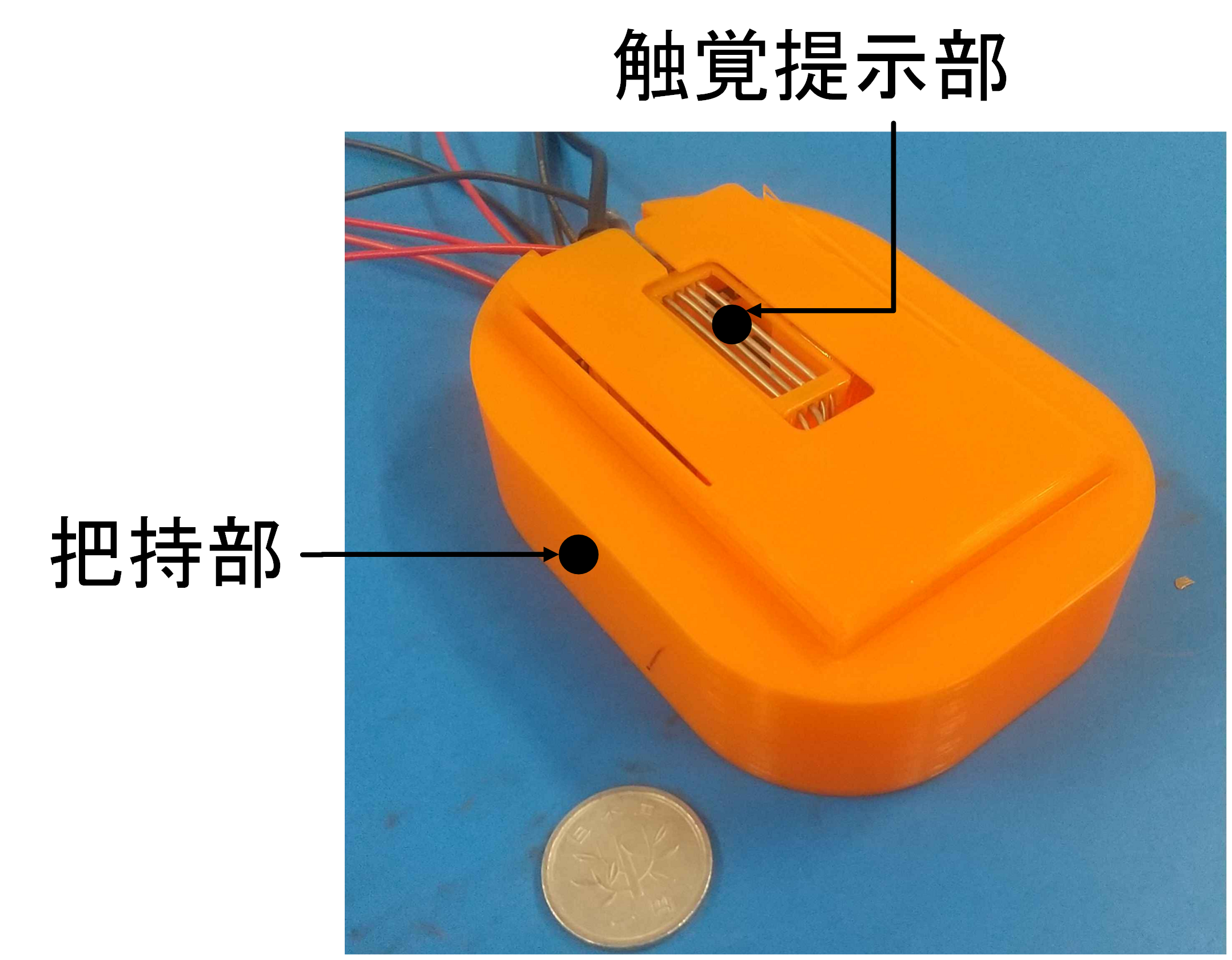
ソフト振動アクチュエータを用いた仮想物体の表面の質感を能動的に探索するための触覚提示システム
〇黒川 朝陽(立命館大学)、清水 真陽(立命館大学)、安藤 潤人(立命館大学)、野間 春生(立命館大学) - 本研究の目的はネット上で仮想物体の表面テクスチャ感を能動的に探索できる触覚提示システムを開発することである.そのために,光学センサと触覚ディスプレイを備えたデバイスと,デバイスの動きに応じて振動を提示するシステムを開発した.評価実験では異なる線幅の縦縞の触覚表現を識別するタスクから,知覚できる細かさを調査した.その結果,線幅が0.16 mm以上で触覚表現の細かさを知覚できることが示された.
- 3C1-10
-
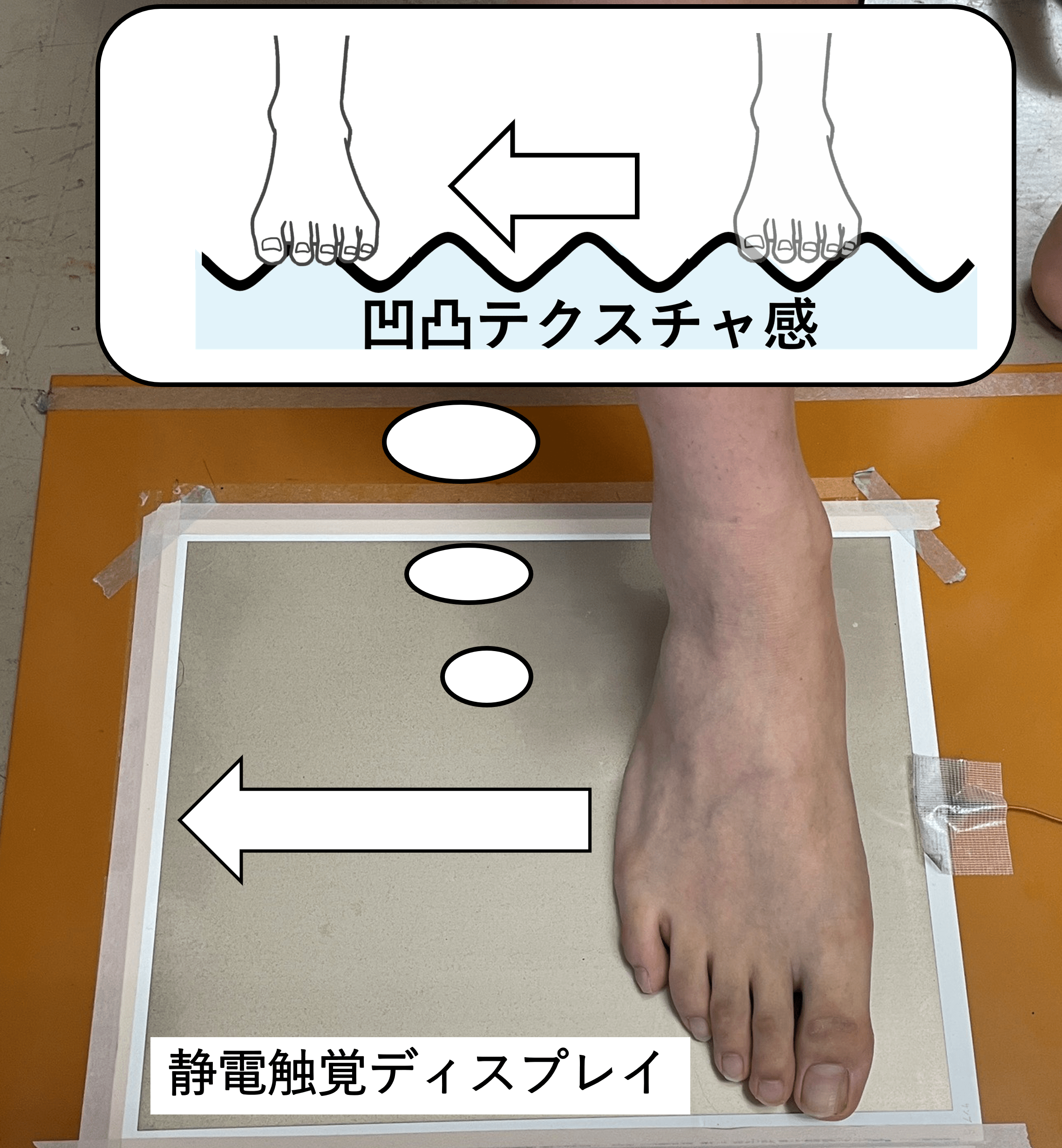
足底への静電触覚刺激における素足と靴下着用時の知覚の違い
〇阿部 瑚南(筑波大学大学院)、橋本 悠希(筑波大学大学院) - 我々はこれまで, 静電触覚技術と紙エレクトロニクス技術を組み合わせたプリンタブル静電触覚ディスプレイを用い, 手部全体を用いた大面積の触覚インタラクションを提案してきた. 本ディスプレイを足底に使用した結果, 素足と靴下を履いた状態でも知覚することができた. 過去に肌の水分保有量が多いと触覚が知覚しにくいと報告された.そのため,実際に本ディスプレイを足底で使用する際には靴下を履くことが望ましいと考えられる.そこで本稿は,素足と靴下(綿100%)の知覚閾値を比較し,靴下(綿100%)を履いた状態での触覚提示の可能性を検証した結果を報告する.
- 3C1-11
-
陶芸技能の伝承に向けた触覚提示システムの応用可能性の検討
〇朱 宇凡(慶應義塾大学大学院メディアデザイン研究科)、堀江 新(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 伝統工芸の職人の技能は身体知となっており、形式知化が難しいためその伝承方法が課題となっている。本研究は、職人の筋肉活動を計測し、感覚情報を直接に触覚によって提示することで、陶芸初心者に対して熟練者の技能への理解を深める技能伝承システムを提案する。提案したシステムを陶芸専門家や一般ユーザーに使用してもらい、システムのユーザー体験の評価に基づき、システムの陶芸技能伝承における応用可能性を論ずる。

- 3C1-12
-
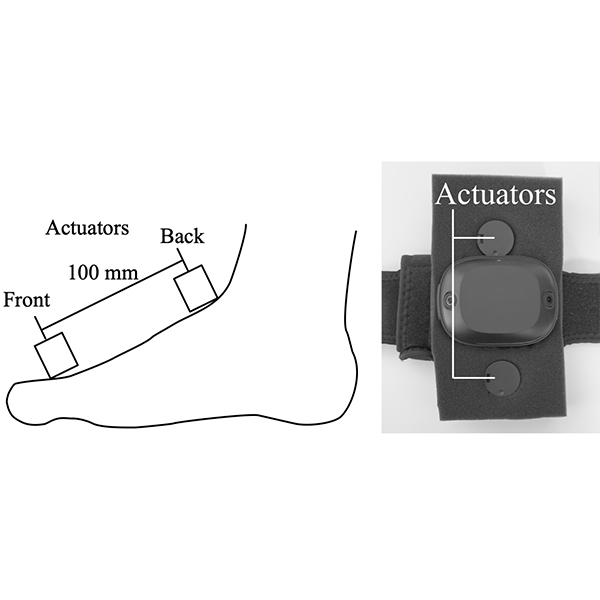
足の甲への振動触覚刺激による歩行感覚の生成
〇伊藤 充(三菱電機株式会社)、小川 勇(三菱電機株式会社)、雨宮 智浩(東京大学) - 我々は足の甲への振動触覚刺激による歩行感覚を調査した.足裏への振動刺激は座位や立位で歩行感覚をもたらすが,圧力で刺激が減衰する.この課題に対し,足の甲を刺激するため片足に2つのアクチュエータを使用し疑似歩行刺激を提示した.本システムは,刺激知覚とエネルギー効率に優れる.予備実験では,被験者が足の甲に装着した触覚デバイスを体験し,触覚的な見かけの動きが歩行感覚を向上させると報告した.