Sept. 13 2024
9月13日
口頭発表 09:30-10:10 モデル・計測・機構
座長:黒田 嘉宏(筑波大学)
- 3B1-01
-
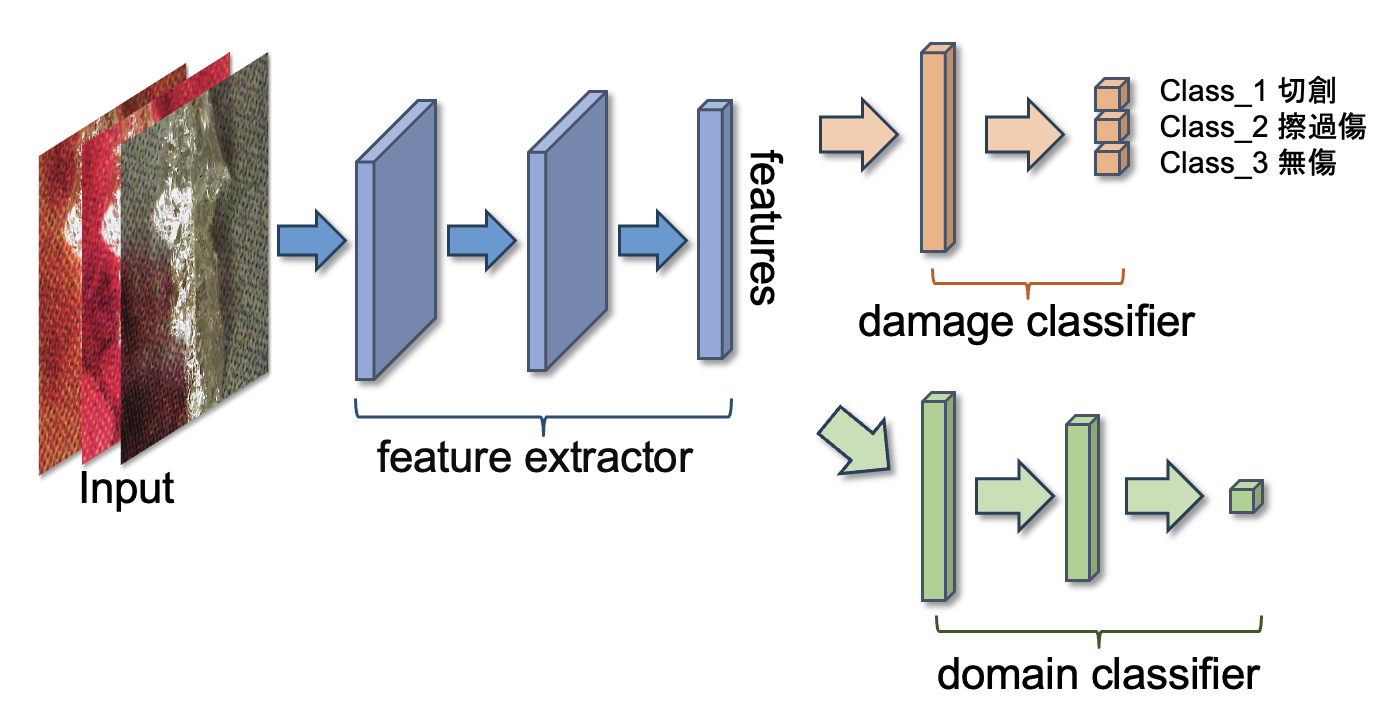
ロボット皮膚のためのゲル痛覚センサ~ドメイン適応技術に基づく傷検出AIシステムの開発
〇周 智威(早稲田大学)、加藤 史洋(早稲田大学)、竹田 隼(早稲田大学)、岩田 浩康(早稲田大学) - 本研究ではロボットハンドへの適用を目指したゲル皮膚の割れや傷を検出するためのドメイン適応技術に基づくDANN手法を提案する。ゲル皮膚の傷は、切創、擦傷、および無損傷の3種類に分類される。NNの訓練のために収集した1440枚の画像を用いて訓練パラメータを最適化し、ドメイン分類器を導入することで、未学習の背景テクスチャにおける識別精度が71.2%から82.5%に向上した。検出された傷位置における傷口の面積を痛みの大きさとして計算することで痛覚センサを構成する手法を提案する。
- 3B1-02
-
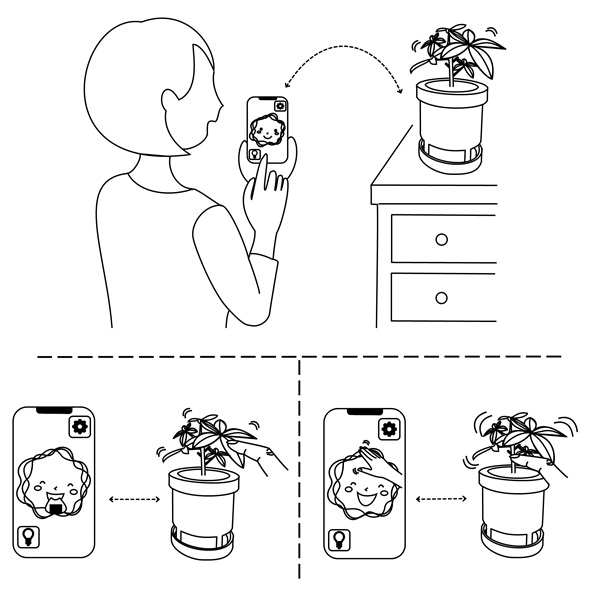
人と植物の物理的接触を拡張するシステム(第2報): 接触により育成する電子ペットの設計と接触部位推定の基礎検討
〇林 海歩(筑波大学)、蜂須 拓(筑波大学) - 我々はこれまでに人と植物との物理的接触を拡張することを目的に,接触を検知して植物から人へ触覚刺激をフィードバックする機能を搭載した植木鉢を開発してきた.しかし,計測は接触の有無の検知にとどまっており,接触位置に応じたフィードバック等のインタラクションの設計が限定的であった.本稿では,容量性センシングを用いた接触計測技術において,接触位置を高精度に推定可能な植物の検討について報告する.
- 3B1-03
-
生体電気インピーダンスを用いた手指状態推定システムの開発- 第2報機械学習システムの構築 -
〇肖 博文(東京工科大学)、高橋 秀智(東京工科大学) - 手指状態の認識はHCIの分野において重要な役割を果たしている。そこで本研究では,3D空間上に手指の姿勢情報を入力できる,データグローブに代わる手指状態計測システムの開発を目指す。 本報では,計測サブシステムからの手指状態データとその状態における手首のインピーダンスデータから,機械学習によりインピーダンスから手指状態の推定を行うシステムの構築・評価を行う。

- 3B1-04
-
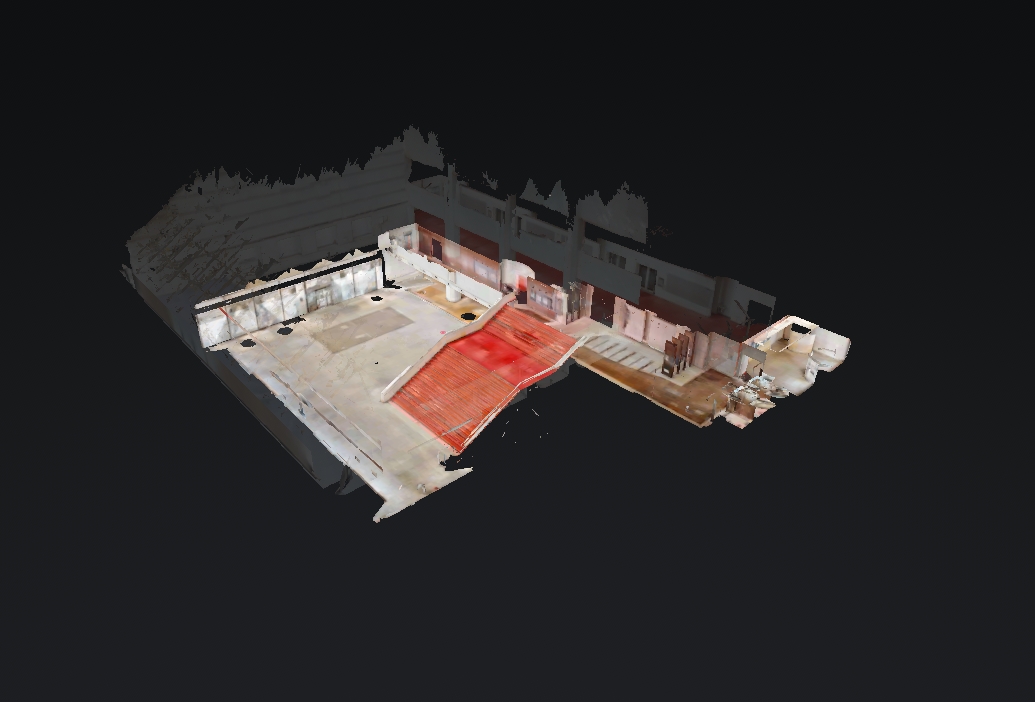
中野サンプラザを事例とした施設のデジタルアーカイブに用いる計測機器の比較評価
〇大和田 彬(国際航業株式会社)、加藤 誉之(国際航業株式会社)、和久津 龍太(国際航業株式会社)、玉川 絢登(国際航業株式会社) - 現実空間をVR空間として再現するにあたり、屋内外空間を精緻に計測した成果はモデル細部の表現・工数削減に大きく寄与できる。一方、三次元計測機器は測量・建設分野向けに多様に展開されており、これら計測機器の活用展開が望まれる。本稿では2023年に閉館した中野サンプラザを対象に、様々な計測機器を用いて屋内外空間を計測した成果を比較し、屋内空間の最適な計測方法について実務的な観点から知見を整理した。
- 3B1-05
-
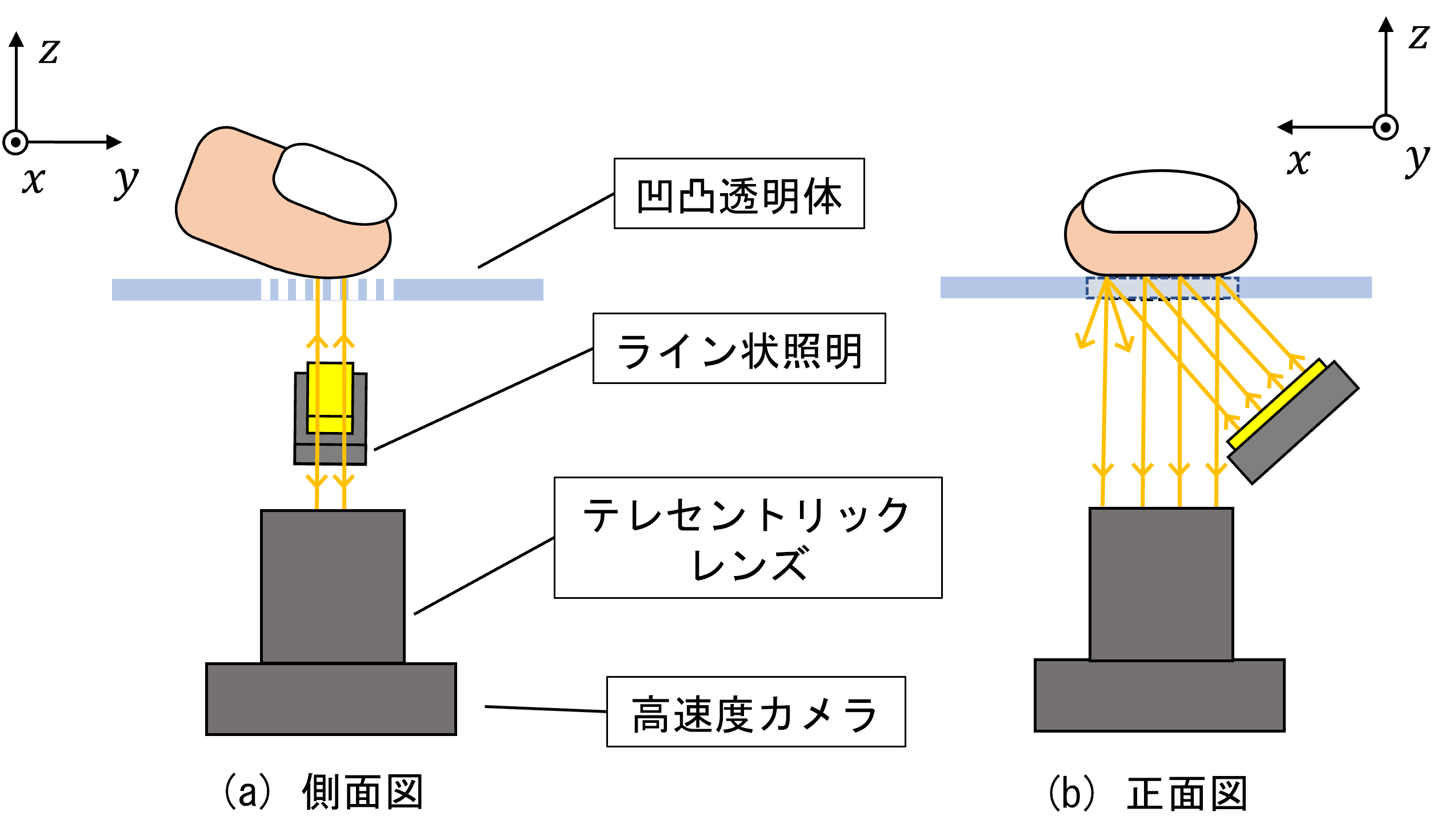
空気中での凹凸面なぞり時の指腹部の挙動の計測システムの精度評価
〇境 侑里(富山県立大学)、田川 和義(富山県立大学) - 筆者らは,指紋を考慮したStick-Slipシミュレータの構築を行っているが,その評価・改良のための指標を得るために,空気中での凹凸面なぞり時の指腹部の挙動の計測を,テレセントリック光学系(テレセントリックレンズ,凹凸透明体,高速度カメラを使用)を用いたシステムにより実現した.しかし,上記のテレセントリック光学系がマーカ追跡に与える影響(変位の誤差)がどの程度であるかの精度評価は行われていなかったため,その評価結果について報告する.
- 3B1-06
-
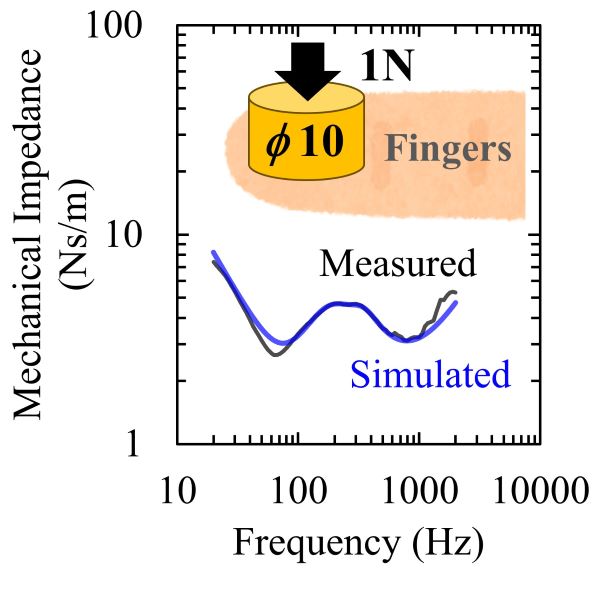
手指提示振動子の評価用カプラにおける機械モデルの構築
〇石川 愼一(リオン株式会社)、舟橋 史考(リオン株式会社)、足立 大(リオン株式会社) - イヤホン性能は装用状態の音響負荷に依存するため、負荷を模擬した音響カプラで性能を評価する。一方、手指の振動感覚を用いた研究が近年盛ん行われているが、使用している振動子を評価する振動カプラが定められていない。今回、手指提示振動子の評価用カプラを開発するために、リファレンスとなる接触面積φ10、静圧1Nにおける人間の指の機械インピーダンスを実測した。また、類推される機械モデルを報告する。
- 3B1-07
-
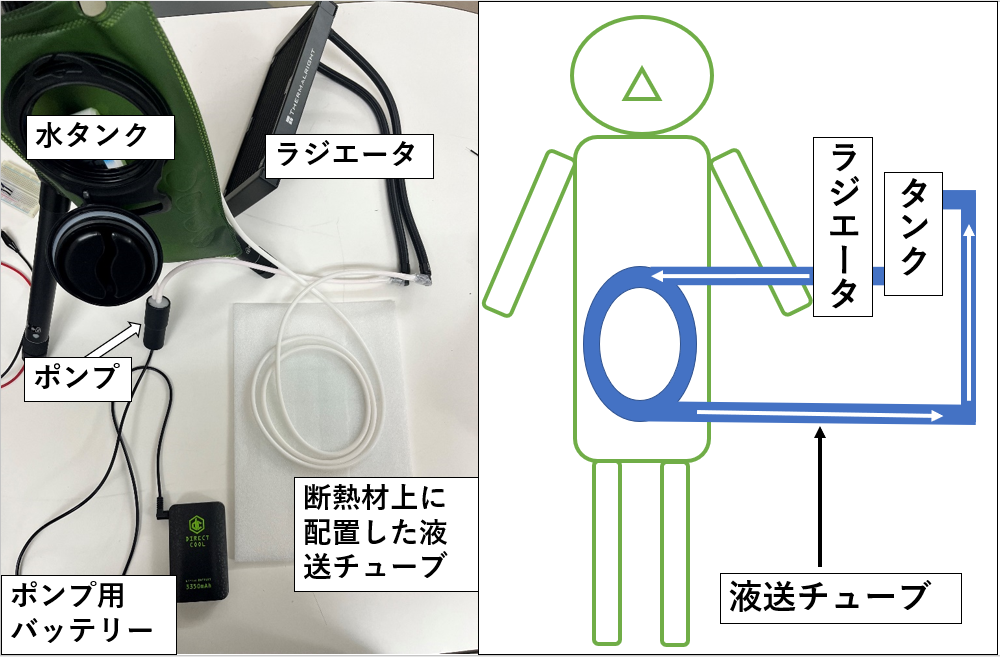
入眠潜時短縮にむけた深部体温調節のための体幹水冷システム
〇江畑 辰諒(筑波大学大学院)、橋本 悠希(筑波大学大学院) - 睡眠不足は心身共に悪影響を及ぼす。この問題を解消するための手段として,我々は入眠にかかる時間(入眠潜時)を短くすることに着目した。睡眠の前後では抹消皮膚温の上昇と深部体温の低下が同時に起きており、両者の体温変化が眠気を引き起こす(Kurt Kräuchi,1999)。本研究では,外部装置からの温度提示によって深部体温の冷却と抹消皮膚温の加熱をそれぞれ行うことで入眠潜時の短縮を目指す。本稿では,深部体温の冷却を行う冷却装置を設計・試作および評価した結果を報告する。
- 3B1-08
-
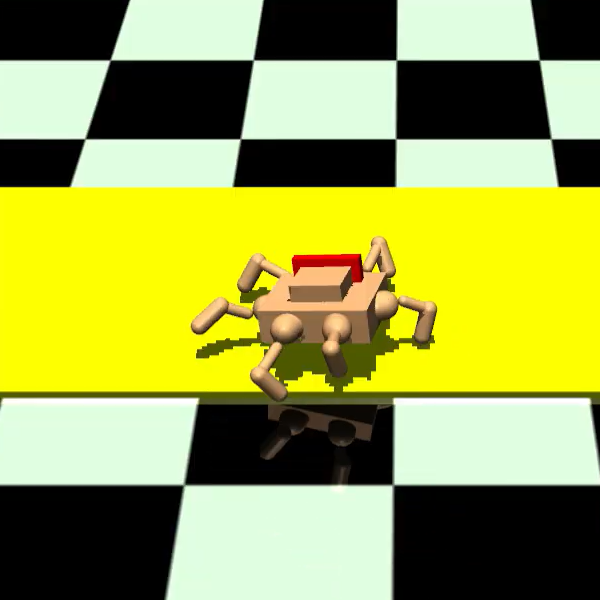
多脚ロボットの遠隔操縦システムの開発‐強化学習による6 脚ロボットの段差対応歩容の獲得‐
〇大山 渓介(東京工科大学)、高橋 秀智(東京工科大学) - ロボットの遠隔操縦で自動化技術の導入が進められている.この研究では,多脚ロボットの遠隔操縦におけるオペレーターの負担を軽減するため,環境に応じた歩行パターンを自動生成するシステムの開発を目指す.本報では,強化学習を用いて仮想空間で6脚ロボットに段差登り動作を学習させ,それを実機に適用した.実機を再現したモデルで高さ3 cmの段差を登る動作を学習させ,実機でその動作を検証した.
- 3B1-09
-
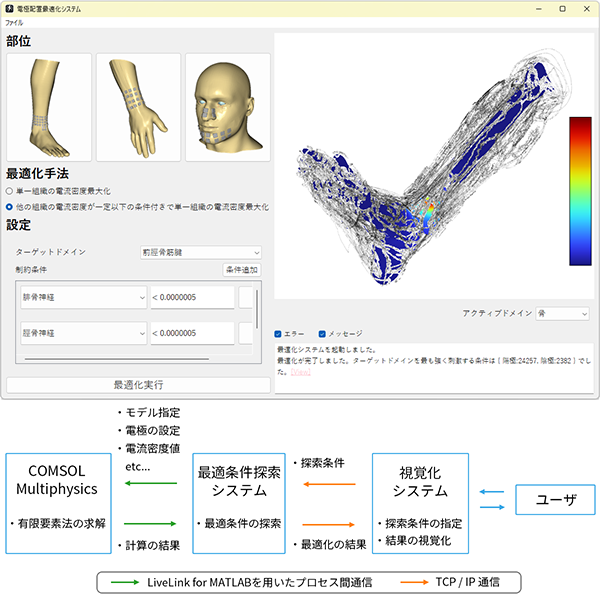
有限要素法を用いた経皮電気刺激の電極配置最適化システム
〇太田 貴士(東京大学大学院)、葛岡 英明(東京大学大学院)、雨宮 智浩(東京大学大学院)、青山 一真(群馬大学) - 経皮電気刺激において,電極配置は重要なパラメータの1つであるが,ヒトの身体は複数の組織が複雑な構造をなしているため,特定の組織を効率的に刺激できる最適な電極配置を直観的に同定することは困難である.本研究では,有限要素法による電流シミュレーション結果の全探索により,膨大な電極配置条件から最適な電気刺激条件を同定するシステムを構築し,筋や腱,神経束などが複雑な配置をなす下肢における電気刺激の電極配置最適化を例に,本システムの有効性を検証した.
- 3B1-10
-
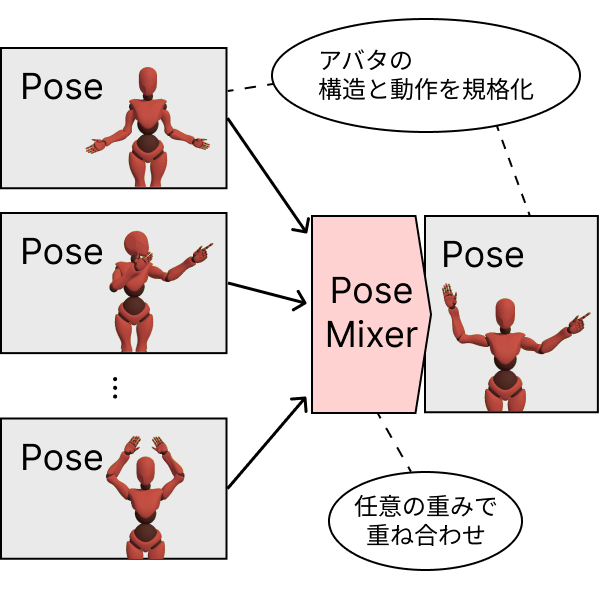
アバタの構造・動作の実装を効率化するツールキット「PoseSynth」の提案
〇山口 周(東京大学)、畑田 裕二(東京大学)、橋浦 健太(東京大学)、鳴海 拓志(東京大学) - 現実の身体のあり方を超越した構造・動作を有するアバタは様々な研究領域で役立てられている一方で,その実装方法は様々であり,再利用が困難である.本研究では,アバタの構造・動作を扱うための規格を策定し,多様な構造を有するアバタの多様な動作を効率良く実装できるツールキット「PoseSynth」を提案する.PoseSynthはアバタの姿勢を変換して別のアバタの姿勢に代入する処理を繰り返すことで,様々なアバタの動作を効率良く実装できる.
- 3B1-11
-
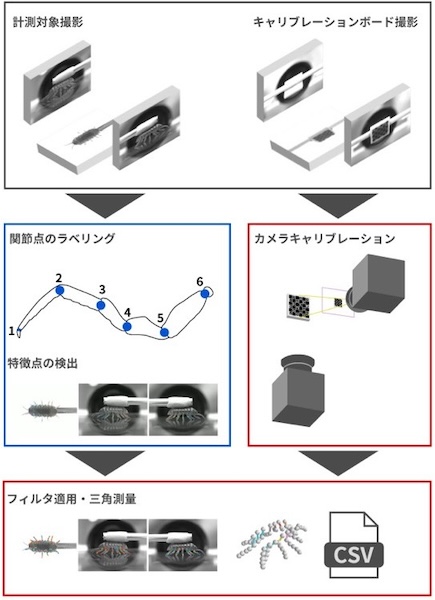
節足動物のための 3D モーションキャプチャシステムの構築
〇荒木 稜雅(京都産業大学)、田邊 匠(京都産業大学)、永谷 直久(京都産業大学) - 本研究は、オカダンゴムシの脚部を対象とした詳細な3Dモーショントラッキングシステムの構築を目指す。従来のシステムでは困難だった小型生物の動きの取得を可能にするため、DeepLabCutとAniposeを用いて腹側からの映像を利用した3次元姿勢推定システムを開発した。これにより、少ないカメラ台数で高精度なモーションデータの取得が可能となり、エンタテインメント分野への応用が期待される。
- 3B1-12
-
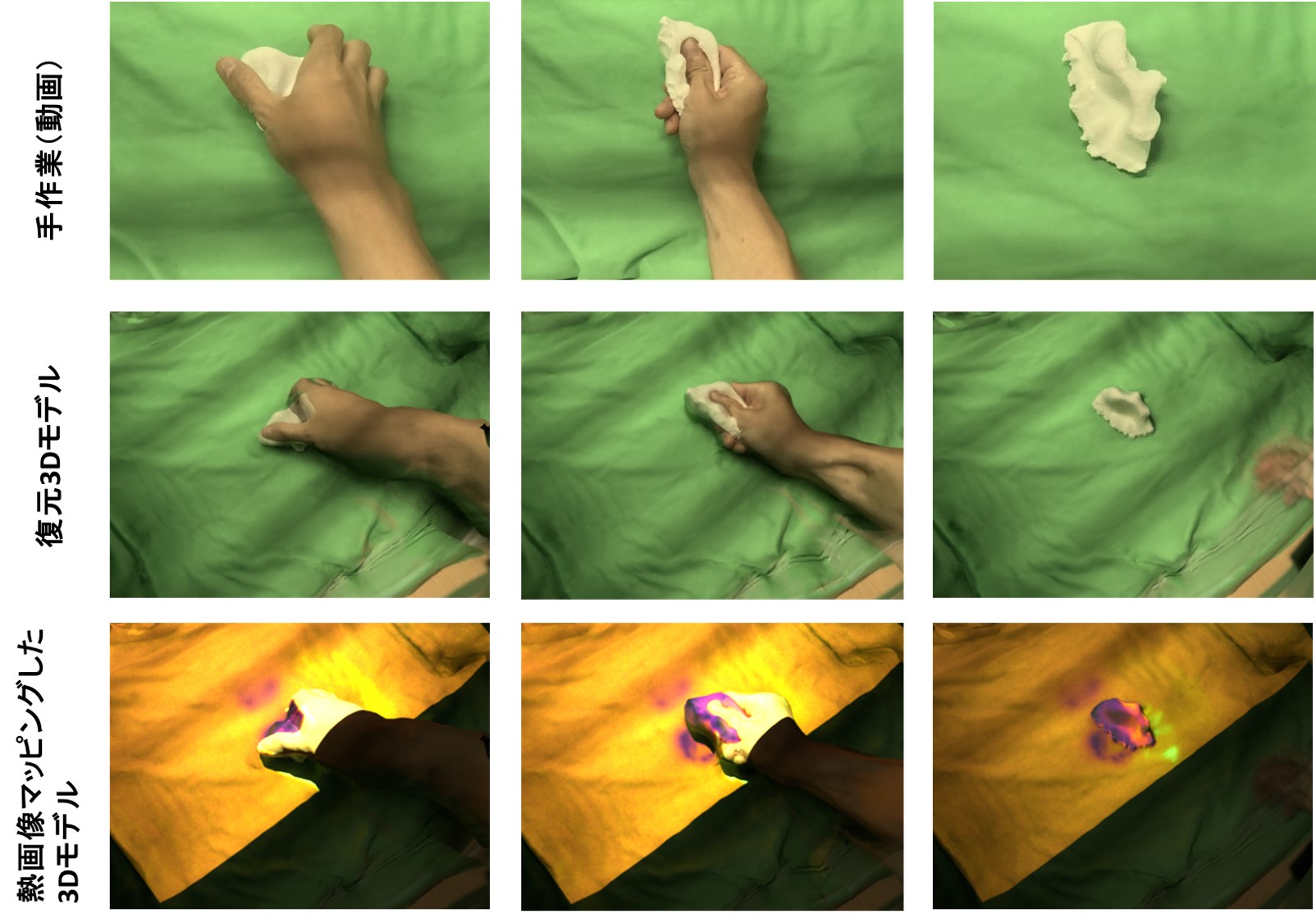
手作業における柔軟な物体表面とその接触領域の3次元復元
〇三浦 康平(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - カメラにより手作業を3次元データとして復元することで,VR/AR技術を用いた熟練者の手作業の追体験・学習が可能になる.対象物体に対し,実際に手が触れていた物体表面上の接触領域を物体にマッピングすることで,物体と手の相対位置の推定精度が向上し,より現実に即したデータが復元できる可能性がある.本発表では,手作業における対象物体の中でも特に,柔軟な物体の表面と表面上の接触領域を復元する手法を提案する.