Monday, 12 September
9月12日(月)
口頭発表 15:30-16:50 クロス・マルチモーダル2
座長:伴 祐樹(東京大学)
- 1B4-1
-
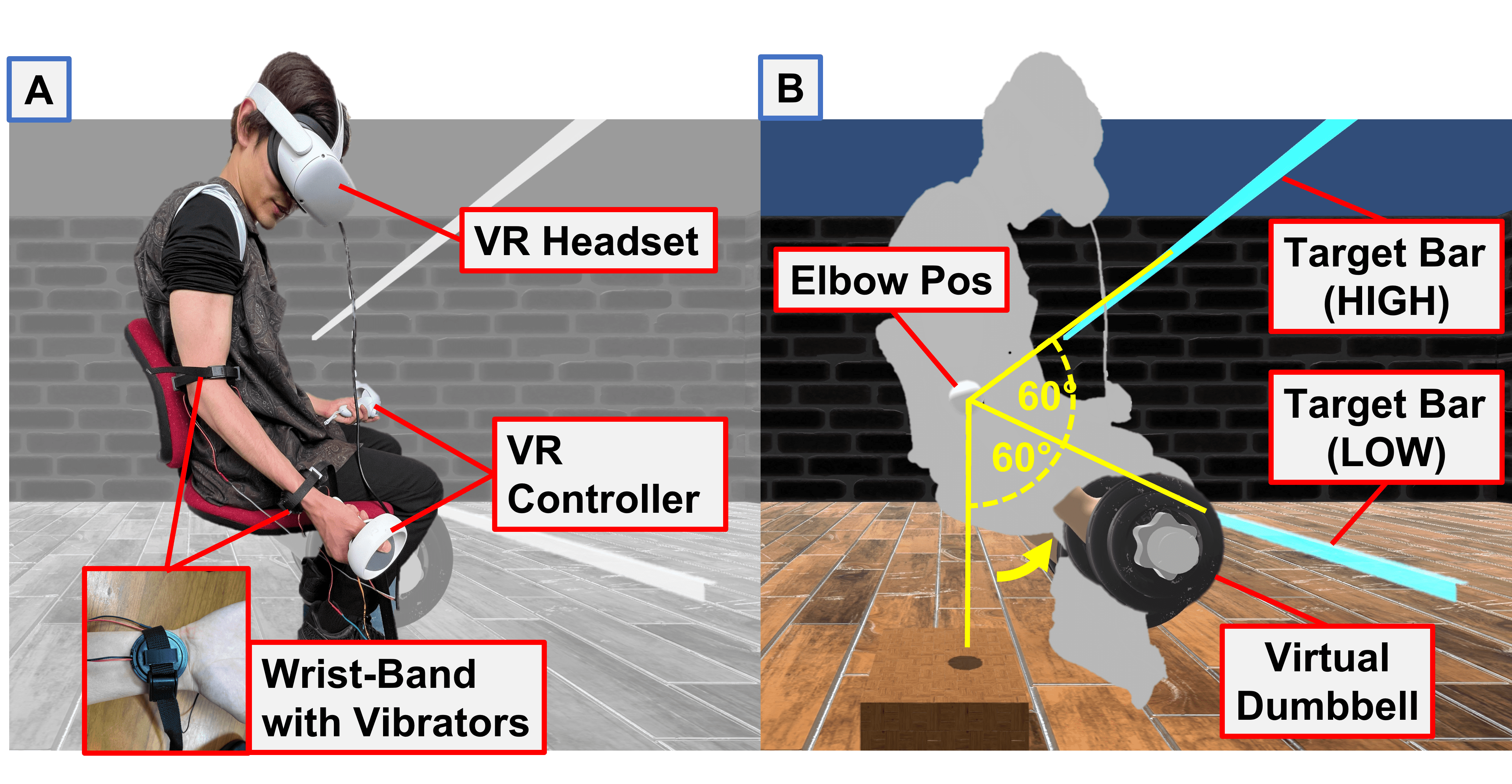
VRにおけるpseudo-hapticsの拡張を目的とした腱振動の活用
〇平尾 悠太朗(東京大学、Inria, France)、雨宮 智浩(東京大学)、鳴海 拓志(東京大学)、Argelaguet Ferran(Inria, France)、Lécuyer Anatole(Inria, France) - pseudo-hapticsとは,身体の動きに対して主に視覚的なフィードバックを適切に変化させることで触知覚を編集する手法である.本研究では,腱への振動刺激が体性感覚に影響を与えるという知見を活用し,腱振動によってpseudo-hapticsの効果を高める手法を提案する.本論文では,腱の振動によって引き起こされる重量知覚と視覚的な運動ゲインによって引き起こされる重量知覚の主観的な等価点を求める実験の結果を報告する.
- 1B4-2
-
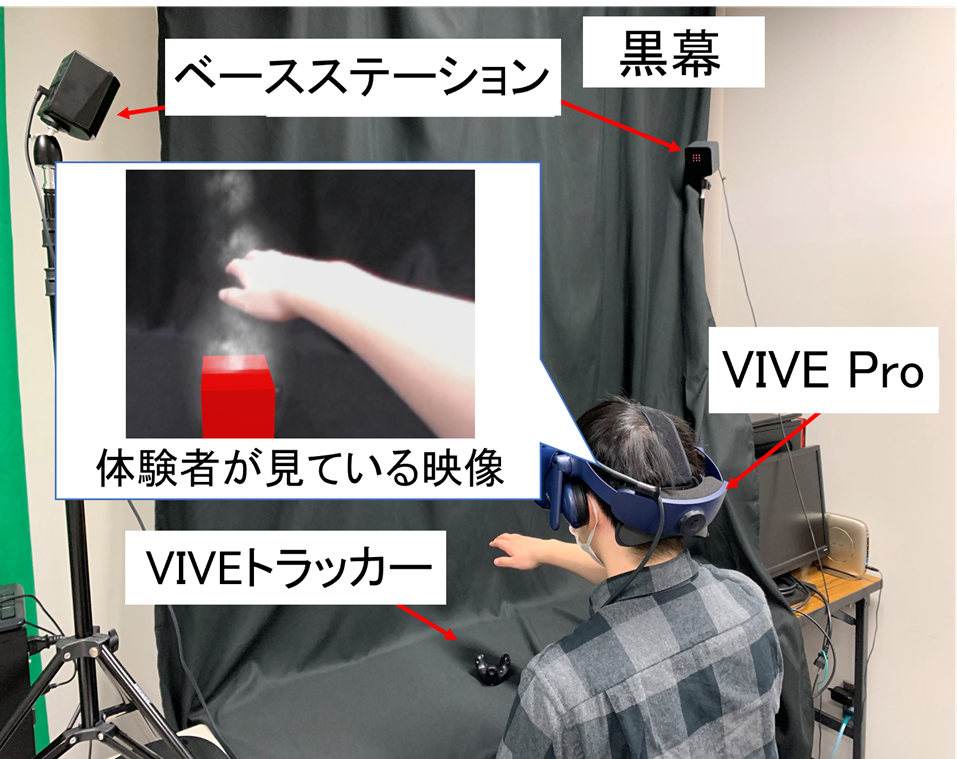
色彩効果を用いた疑似温度感覚に関する基礎実験
〇丸田 千滉(龍谷大学院)、橋口 哲志(龍谷大学院) - VR・AR等の仮想体験時には疑似触覚と呼ばれる複数の感覚モダリティが相互作用し錯覚が生じる場合がある.疑似触覚は主に視覚情報が他の感覚モダリティに影響すると考えられ,重量感や抵抗感等の錯覚が生じる.しかし,温度感の疑似触覚は未だ手法が確立されておらず,不明瞭な部分が多い.そこで本研究では温度感覚に影響を与え得る色彩効果を用いて,温度感を伴う疑似触覚の生起を試み,分析する.
- 1B4-3
-
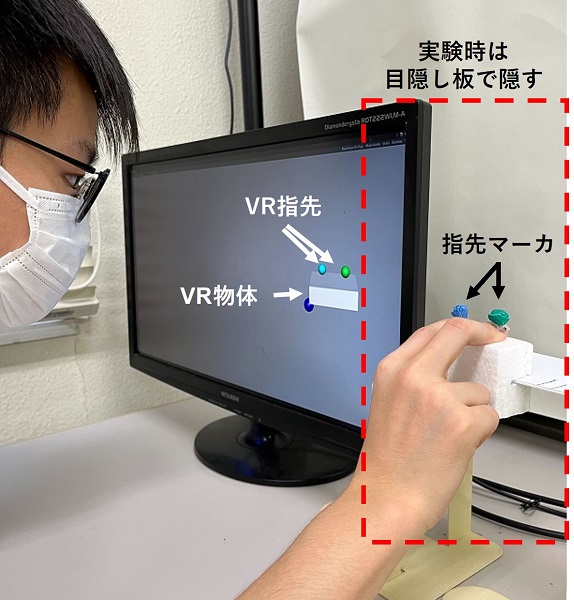
疑似触覚によりVR物体サイズの表現範囲を拡張する受動力覚型ハンドコントローラの検討
〇河野 玄(東京農工大学)、藤田 欣也(東京農工大学) - 本研究では,手指を用いたVR物体操作を実現する小型軽量なコントローラを目標に,実物体を用いた受動力覚とPseudo-Hapticsの併用による,VR物体サイズの改変可能性を実験的に検討した.その結果,1-10cmのVR物体の把持を違和感なく表現するには,3種類の大きさの実物体が必要との知見が得られた.そこで,手指に対して伸展トルクを印加するデバイスを装着したところ,単一実物体が表現可能なVR物体の範囲が拡大する可能性が示唆されたので報告する.
- 1B4-4
-
足底の接地・非接地制御によるVR飛行体験の臨場感向上
〇伴 祐樹(東京大学)、吉田 健人(東京大学)、宇治土公 雄介(日本電信電話株式会社) - 非日常的な体験の提供はVRのコンテンツの一角をなす.非日常的な体験の中でも,何かに乗った状態もしくは身一つの状態で空を飛ぶ体験を提供する手法の研究が様々になされてきており,コンシューマ向けコンテンツも多数開発されている.本研究では,着座時の足底の接地・非接地を切り替えることによりバーチャルな飛行体験の臨場感を向上させられるという仮説を立て,被験者実験を通じてその妥当性を確かめた.
