Sept. 11 2024
9月11日
口頭発表 09:30-10:10 ウェアラブル
座長:小室 孝(埼玉大学)
- 1E1-01
-
多様な姿勢に対応したワイヤレス足裏振動デバイスによるバーチャル歩行体験
〇中村 純也(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - 本発表では、バーチャル歩行体験を実現するワイヤレス足裏振動デバイスを開発した。このデバイスは、振動子と圧力センサによるバーチャル歩行の制御とフィードバックを提供する。前足部と踵部の振動子は、歩行に同期して足裏への振動を提示し、歩行する地面質感に応じた振動を提示する。6つの圧力センサは、足裏の荷重変化を捉え、歩行方向を制御する。ユーザーは立位や座位、仰向け姿勢など身体的制約に左右されず体験できる。

- 1E1-02
-
入出力装置一体型ハンドヘルドXRデバイスのフォームファクタに関する考察
〇小西 遥登(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - 本研究では、HMDの棒状の把持部を取り付け、その下端に入力部を結合した一体型ハンドヘルドXRデバイスを提案する。ユーザは一方の手でデバイスの把持部を把持して自らの頭部に固定し、もう一方の手を入力部に載せる。本デバイスでは、ユーザが入力部に手を置く際に、ユーザの手が把持部に干渉することが問題となる。本発表では、提案システムのモックアップを作成し、提案システムのフォームファクタについての知見を示す。

- 1E1-03
-
胸部装着型XRデバイスにおける腹部平面上のタッチ操作と仮想空間との座標対応に関する考察
〇山内 耀斗(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - 本研究では、歩行や巡回を伴う作業現場でのXR業務を想定した、仮想空間の没入と離脱がヘッドバンドレスで容易な胸部装着型のXRデバイスの構成法を提案する。実工具の把持を想定しているため仮想空間を操作するハンドコントローラは利用できない。そのため、ユーザの腹部付近にタッチパッドを垂直に備える。骨格構造に基づいた直感的なタッチ操作を提供するため、垂直面上のタッチ操作とカーソル移動の座標対応に関する知見を示す。

- 1E1-04
-
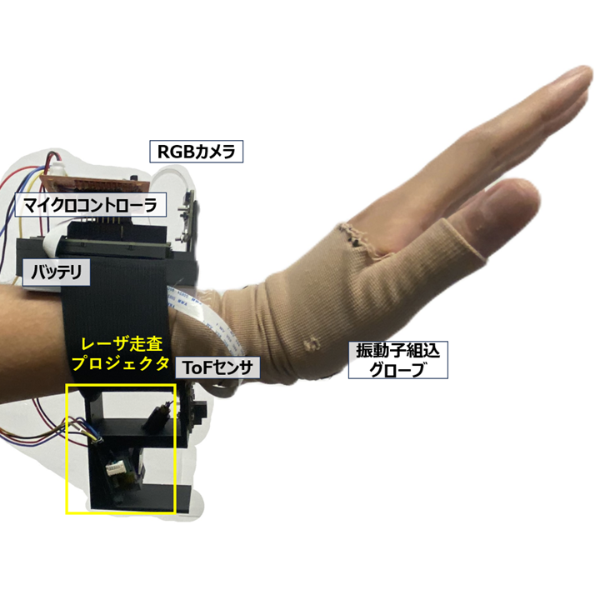
手首装着型拡張手投影における深度センサを用いた遠隔接触感覚
〇竹内 悠人(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - 我々はMEMSミラーを用いた手首装着型のレーザ走査プロジェクタによる拡張手投影システムを提案している.従来システムでは拡張手の投影のみしか行えず,投影による情報の取得が実現されていない.そこで,投影した拡張手の深度情報を深度センサで計測することで,投影位置の凹凸情報を遠隔に取得しユーザにフィードバックし感覚追加を行うシステム構成を提案する.これにより装着型実装における遠隔接触感覚の知見を示す.
- 1E1-05
-
Tape-ticsを用いた新たな触覚ツールキットの開発と応用
〇パニアグア カルロス(奈良先端科学技術大学院大学)、太田 裕紀(奈良先端科学技術大学院大学)、平尾 悠太朗(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - 「Tape-tics」は、柔軟なフレキシブル基板に小型振動子を配列したテープ型デバイスである。任意の長さに切り取り、任意の場所に貼り付けることができ、特定の部位に合わせた設計や複雑な配線が不要である。開発したGUIコントローラを用いて、任意の触覚表現をプログラムすることが可能。さらに、マイクロコントローラに様々なセンサーを組み合わせることで、多様な用途に対応できる。本論文では、このTape-ticsを用いたさまざまな応用例を紹介する。

- 1E1-06
-
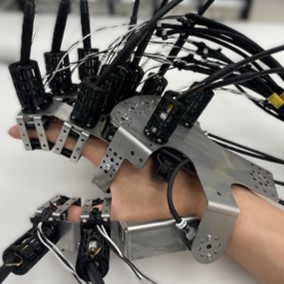
Motion-Less VRの研究:五指・多自由度運動の実現に向けた基礎開発
〇望月 典樹(日本工業大学) - Motion-Less VRは、実身体の運動を必要としないVRシステムである。このシステムでは、固定された実身体の関節トルクを計測し、動力学に基づいてバーチャル身体の運動を生成し、その結果を感覚器にフィードバックする。これにより、実環境による空間的・物理的な制約を受けずにバーチャル身体の操作が可能となる。本研究では、五指の屈曲・伸展および内転・外転運動を可能とするシステムの開発を行う。
- 1E1-07
-
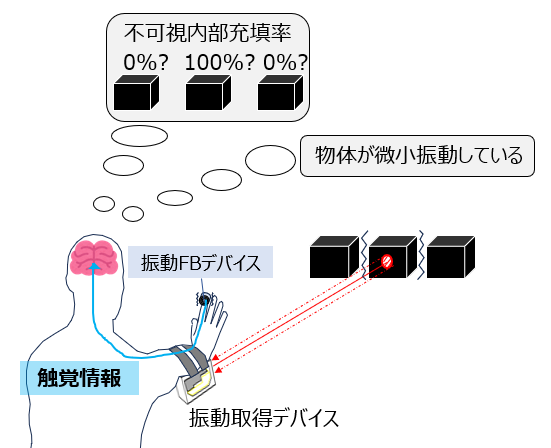
手首装着型レーザスペックル振動計測を活用した触覚拡張による遠方物体の不可視情報識別
〇花井 俊(大阪大学 大学院基礎工学研究科)、岡本 祥宏(大阪大学 大学院基礎工学研究科)、佐藤 優志(大阪大学 大学院基礎工学研究科)、岩井 大輔(大阪大学 大学院基礎工学研究科)、佐藤 宏介(大阪大学 大学院基礎工学研究科) - 我々は、イベントカメラを用いたレーザスペックル振動計測システムを手首に装着し、遠方物体の振動情報の可触化から感覚追加する身体拡張ウェアラブルシステムを提案している。本報告では、遠方物体の外見からでは分からない微細な振動情報や内部充填率等の不可視情報をユーザに振動フィードバックする際の、対象へのプローブ振動の付与の仕方や感度との関係について述べる。
- 1E1-08
-
ユーザの深呼吸の状態を計測するデバイスの提案〜キャラクタ操作としての応用〜
〇羽田 晶一(湘南工科大学)、堀越 力(湘南工科大学) - 本研究では実際の深呼吸の動作を使ったアクションゲームを提案する.リュックサックの両方の肩ベルトにアナログスティックを取り付け,張力でアナログスティックを傾け呼吸を検知するデバイスを考案した.提案デバイスにより深呼吸の僅かな動きの検出が可能となり,ゲーム内のキャラクタの深呼吸の動きを,ユーザの実際の深呼吸の動きとして入力することが可能となった.従来手法と比較し,ゲームの没入感がより高まることを示す.

- 1E1-09
-
狭可動範囲ハンドヘルド力覚提示装置による空間ベクトル場提示
〇山邉 泰雅(筑波大学)、矢野 博明(筑波大学) - 本研究では,ユーザに歩き回れるほどの空間に広がる流れ場のようなベクトル場を指先に力覚提示するためのハンドヘルド力覚提示装置を開発した.位置姿勢計測機能付きグリップを支持点として, 3自由度のリンク機構とサーボモータによって効果器に力ベクトルを提示する.動作確認のためのベクトル場の知覚実験の結果,ベクトル場の可視化と力覚提示を同時に行うことで,大空間でのベクトル場の知覚の可能性を検証した.

- 1E1-10
- 取り下げ
- 1E1-11
-
馬の視野角を魚眼カメラを用いてリアルタイムに体験するHMDデバイスの開発
〇齋藤 達也(東京工芸大学)、高村 環(東京工芸大学)、阿部 一直(東京工芸大学) - 本研究では、馬の視野を体験できるHMDデバイス『U-HMD』を提案する。デバイスの左右に2台の魚眼カメラを取り付け、映像を体験者の両眼に提示することで、馬の視野体験を試みる。デバイスの設計には3Dプリンタを用いており、本発表ではリアルな馬型の外装の制作方法も紹介する。また、U-HMDを装着することで、馬の視野の特徴を体験できるかどうかを調査・実験した。
