Sept. 11 2024
9月11日
口頭発表 10:10-10:50 移動感覚・テレプレゼンス
座長:矢野 博明(筑波大)
- 1B2-01
-
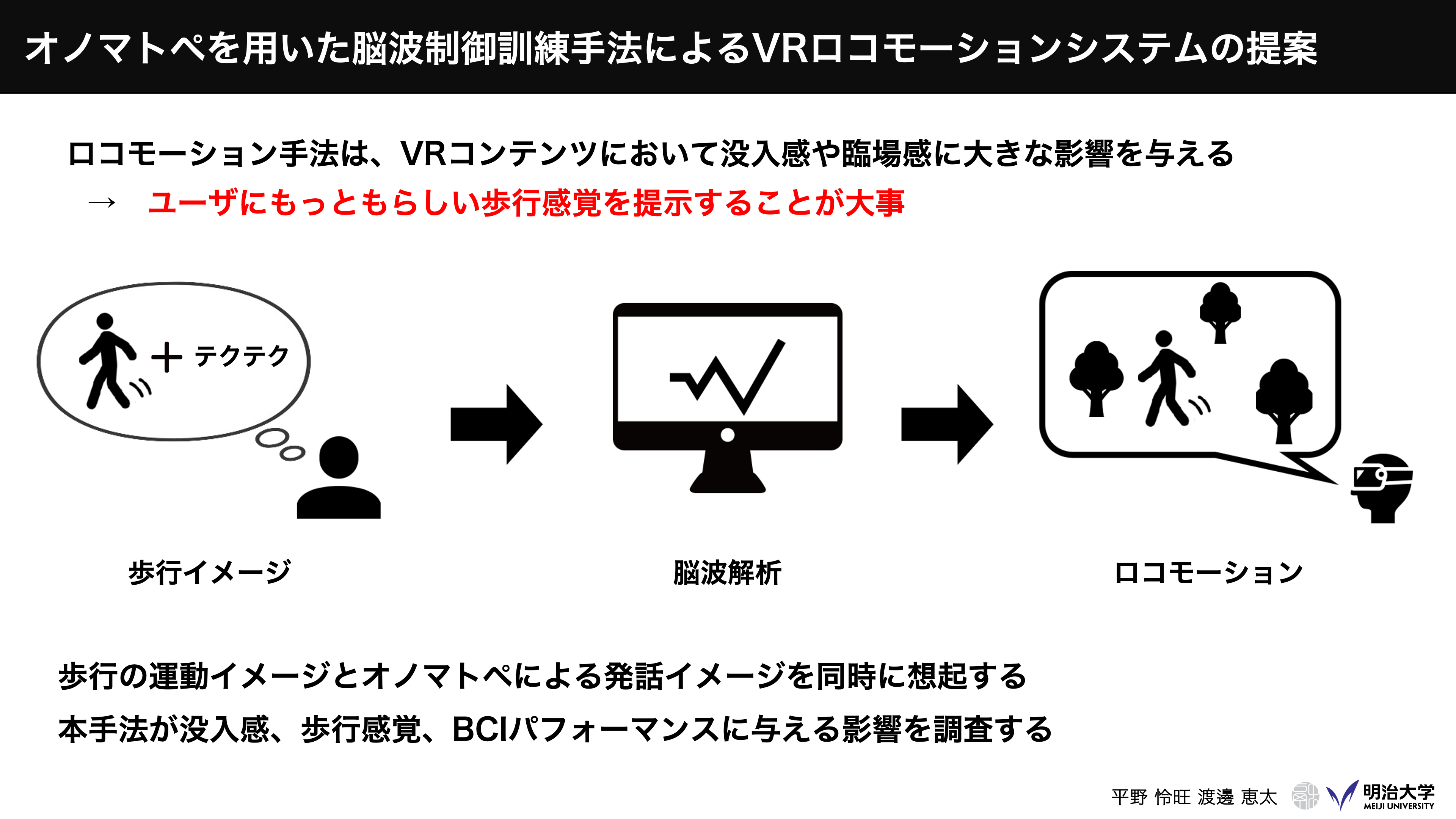
オノマトペを用いた脳波制御訓練手法によるVRロコモーションシステムの提案
〇平野 怜旺(明治大学)、渡邊 恵太(明治大学) - 本研究では,オノマトペを用いた脳波制御訓練手法によるVRロコモーションシステムを提案する.ユーザは歩行の運動イメージと歩行に関連するオノマトペによる発話イメージを同時に想起することにより,バーチャル環境内を歩行できる.このマルチモーダルなアプローチにより,安定した脳波パターンの生成を促し,イメージに基づく移動操作を可能にする.本稿では,本手法がユーザの歩行感覚やパフォーマンスに与える影響を調査する.
- 1B2-02
-
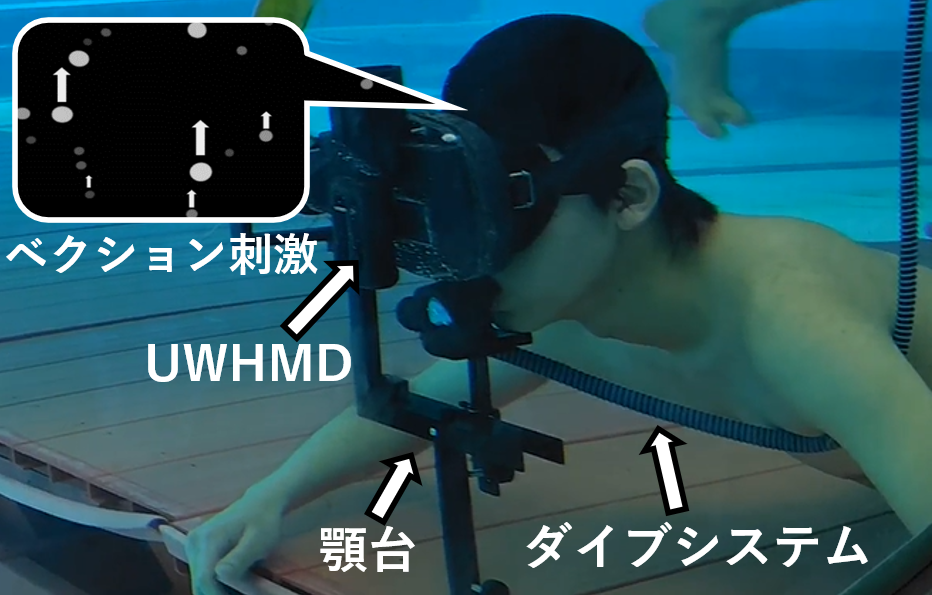
潜水状態がベクションに与える影響
〇関 公一朗(筑波大学大学院)、橋本 悠希(筑波大学大学院) - 本研究では、潜水状態が視覚誘導性自己運動感覚(以下ベクション)に与える影響を明らかにすることを目指す. 潜水状態では擬似的な無重力状態になることから, 自己位置推定を平衡感覚よりも視覚情報に強く頼り、ベクションの増加が予想される.そこで本稿では,陸上状態と潜水状態でベクション刺激を60秒間提示し、生起した自己運動感覚の強度をベクションの強度、ベクション潜時で評価・比較した結果を報告する。
- 1B2-03
-
AMURO、行きまーす!:超加速感を実現する自動運転VRシステムの検討
〇清水 祐輝(奈良先端科学技術大学院大学)、重藤 瞭介(奈良先端科学技術大学院大学)、野口 翔平(奈良先端科学技術大学院大学)、澤邊 太志(奈良先端科学技術大学院大学) - 自動運転車内での没入型エンターテイメント研究は増えており,VR映像コンテンツを車両挙動に同期させ,搭乗者の視覚と体感を一致させることで,没入感向上の効果があることが知られている.これらの既存研究を元に,本研究では,車両挙動を利用した,より没入感の高い自動走行VRエンターテイメント実現のため,まずは車両の加速時の挙動に注目し,加速以上の超加速感を搭乗者に知覚させる新しい自動走行没入型システムを提案する.

- 1B2-04
-
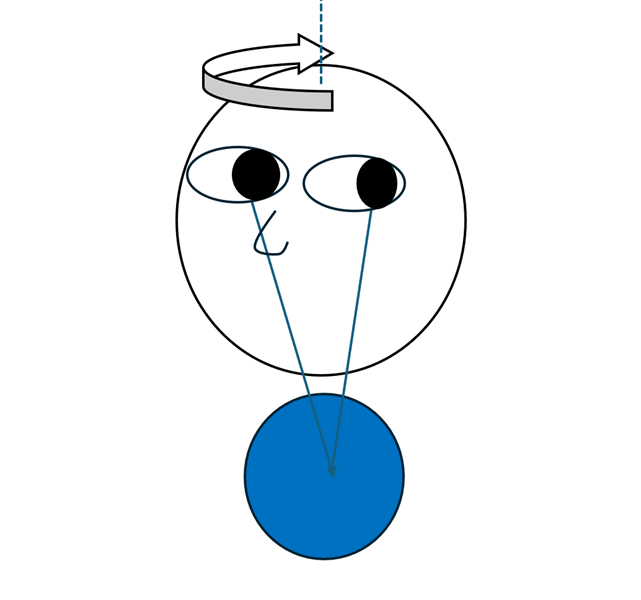
仮想空間内における視線と頭部運動協働によるユーザー回転手法
〇寺田 淳之介(横浜国立大学)、岡嶋 克典(横浜国立大学) - 視線と頭部運動を協働させることでVR空間においてユーザーが自由かつ直感的に連続的に回転できる手法を提案する。ユーザーと相対座標を固定した、目の前のオブジェクトに対してユーザーが視線を送り続けながら頭部運動を行うことで、ユーザーは連続的に回転を行うことができる。視線と頭部を協働させることで誤作動を防ぐ他、ハンズフリーで自由に操作可能でありVR酔いも抑制することができる。
- 1B2-05
-
Walking-in-Placeにおける仮想階段昇段のための垂直運動位相一致手法
〇猿川 聖(横浜国立大学)、岡嶋 克典(横浜国立大学) - Walking-in-Placeによる仮想階段昇段について,垂直方向の下肢運動と視覚的運動の位相を現実の昇段運動と一致させる手法を開発した.提案手法,位相を考慮しない手法,提案手法と同様の視覚的運動が得られるコントローラ操作の3条件について,疑似階段昇段時の歩行感を比較した結果,提案手法が位相を考慮しない手法と比べて下肢動作や視覚的運動をより再現できることが示された.
- 1B2-06
-
自動運転時の移動感覚軽減のためのモーションプラットフォーム設計
〇清水 祐輝(奈良先端科学技術大学院大学)、澤邊 太志(奈良先端科学技術大学院大学)、神原 誠之(甲南大学)、加藤 博一(奈良先端科学技術大学院大学) - 自動運転によって搭乗者は車内で自由な活動が可能となる一方で,車両からの加速度刺激は車内活動の妨げとなる.既存研究では,視覚と体感の制御による搭乗者の移動感覚軽減を提案したが,体感制御で用いたモーションプラットフォームの設計は従来の運転経験に基づいて行っていた.そこで本研究では,実環境の走行で発生する加速度刺激の特性と人の加速度刺激の知覚特性からモーションプラットフォームを再設計する.

- 1B2-07
-
映像視聴時の自動走行酔い軽減のための空間オーディオ情報提示による重心移動の検討
〇澤邊 太志(奈良先端科学技術大学院大学)、神原 誠之(奈良先端科学技術大学院大学、甲南大学)、加藤 博一(奈良先端科学技術大学院大学) - 自動走行化することによって,多くの搭乗者は動画視聴などの映像コンテンツを見ることに時間を費やすことが予測されている.しかし,走行中の予測困難な車両挙動からの複数の刺激により,自動走行酔い発症の増加も懸念されている.よって本研究では,自動走行環境における映像コンテンツ視聴時の酔い軽減を目的とし,空間オーディオを用いた自車挙動の情報提示による重心移動の誘導手法を提案する.

- 1B2-08
-
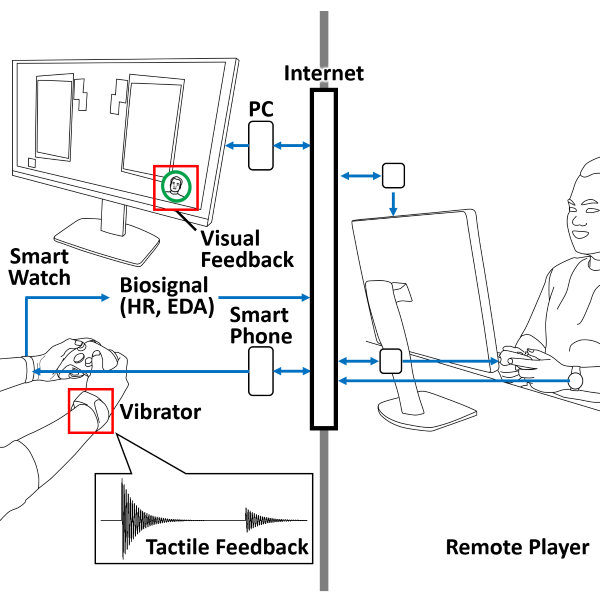
情動体験を拡張する疑似心拍振動提示システム(第4報):eスポーツプレイヤの存在感増強を目指した生理反応の提示
〇森 理樹(筑波大学)、高田 崇天(筑波大学)、梶浦 雅之(筑波大学)、ハサン モダル(筑波大学)、蜂須 拓(筑波大学) - 我々はこれまでに,リモートコミュニケーションにおける社会的信号の触覚的伝達を目的に,感情の時間的変化(情動)を想起させる人工的な心拍を模した振動刺激(疑似心拍振動)の設計に取り組んできた.本発表では,eスポーツにプレイヤの存在感の増強を目指し,生理反応を計測して疑似心拍振動によって遠隔のプレイヤに実時間で相互に伝達するシステムの設計について報告する.
- 1B2-09
-
実空間-VR環境における同時複数個所での会話を実現するためのサウンドループバック防止手法
〇前田 新(明治大学)、三武 裕玄(明治大学) - 実空間とVR空間を接続するシステムにおいて同時複数個所での音声伝達を試みる際に,ハウリングやループバックによって会話が阻害されることがある.本研究では,VR空間側の音声伝達のON/OFFを制御することで,通常のエコーキャンセルマイクスピーカー(1対1のエコーキャンセル能力のみをもつ)を複数使うだけでハウリングやループバックを起こさずに,VR空間と現実空間の間で複数の会話が同時に成立可能な環境を作る手法を提案する.
- 1B2-10
-
話者CGモデルを実空間アバターロボットに提示するXR遠隔対話システム
〇米田 悠人(東京都立大学大学院)、小島 優希也(東京都立大学大学院)、福地 庸介(東京都立大学大学院)、YEM VIBOL(筑波大学大学院)、池井 寧(東京大学大学院)、西内 信之(東京都立大学大学院) - XR技術とアバターロボットを利用した遠隔対話システムを構築している.本システムでは,MRグラス(HoloLens2)を装着した現場作業者とHMD(head mounted display)を装着した遠隔対話者が,現地で空間オブジェクトを含む対話を円滑に行うことを目的としている.遠隔対話者の表情は3Dアバターで再現され,頭部・口元の動き,視線の方向を反映した対話を行える機能を実装した.評価実験では,遠隔対話者と現場作業者が対話をしながら共同作業を行うための本システム構成の有効性とリアルアバターの表情生成の効果を定性的に評価した.

- 1B2-11
-
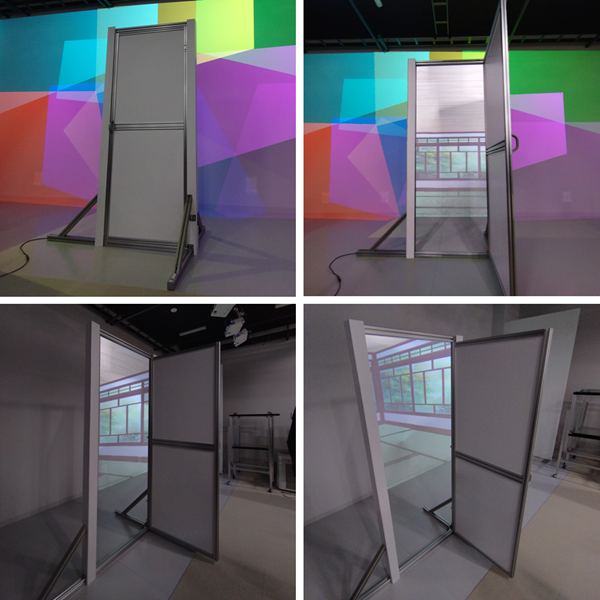
ドアを介して空間の接続を行うプロジェクションマッピングの検討(第2報)
〇稲田 優輝(電気通信大学)、橋本 直己(電気通信大学) - 遠隔コミュニケーション技術の発展により,遠隔地間での対話が可能になった.臨場感の向上を目指し,遠隔地を空間ごと表示するシステムも開発されている.一方で,空間の接続前後の映像切り替えがユーザに提示されると,臨場感に悪影響を及ぼしてしまう.本稿では,遠隔地空間との接続表現において,ドアの開閉による自然な映像切り替えを行うプロジェクションマッピングを提案し,臨場感と娯楽性への効果を検証する.
- 1B2-12
-
遠隔MRロボットアーム制御によるスマートな3Dスキャンシステム
〇宇佐美 龍斗(名古屋大学)、渡邊 企章(名古屋大学)、具志 祐希(名古屋大学)、筒井 秀斗(名古屋大学)、渡辺 圭貴(名古屋大学)、加納 一馬(名古屋大学)、相川 雄也(名古屋大学)、志村 魁哉(名古屋大学)、林田 望海(名古屋大学)、浦野 健太(名古屋大学)、米澤 拓郎(名古屋大学)、河口 信夫(名古屋大学) - VRヘッドセットは広く社会に普及しつつあるが,ヘッドセットを通じた実社会への応用は十分に促進されていない.本研究では,VRヘッドセットを通じて遠隔地のロボットアームを用いた直感的な作業ができる枠組みを構築し,例としてロボットアームにRGB-Dカメラを取り付けて遠隔3Dスキャンを行う.本システムはWebブラウザを介して一般的なVRヘッドセットでアクセスが可能であり,幅広い分野での活用が期待される.
