Tuesday, 12 September
9月12日(火)
口頭発表 09:50 - 10:30 触覚2
座長:田辺 健(産業技術総合研究所)
- 1A2-01
-
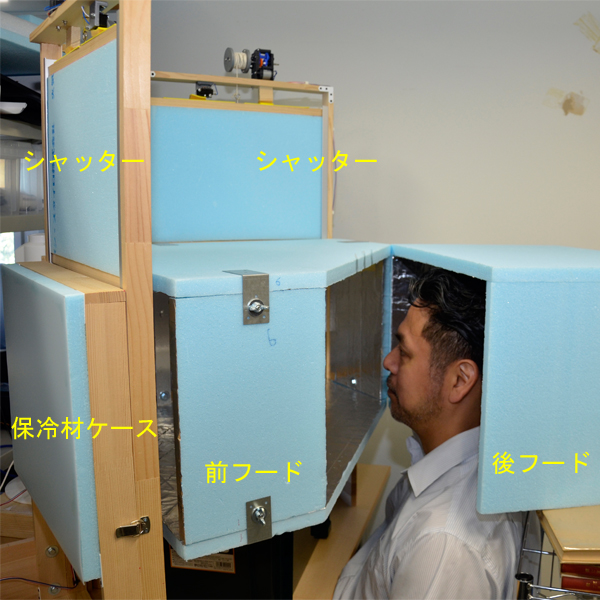
輻射による非接触温度ディスプレイのデモシステムの製作
〇久米 祐一郎(電気通信大学、平由商店研究部)、水野 統太(電気通信大学) - より高度なVRや高臨場感の実現のために,人体より高温と低温の輻射源を用いて体表に温冷感を非接触で連続的に生起できることを明らかにしている.この原理を実用的なシステムへ応用する場合,遠赤外線輻射の制御や輻射源と体表との温度差を考慮したシステム設計が必要である.デモシステム製作に際して輻射源の特性を考慮し,シャッター制御や遠赤外線を反射によって導くフードを検討し,その効果を測定し有効性を確認した.
- 1A2-02
-
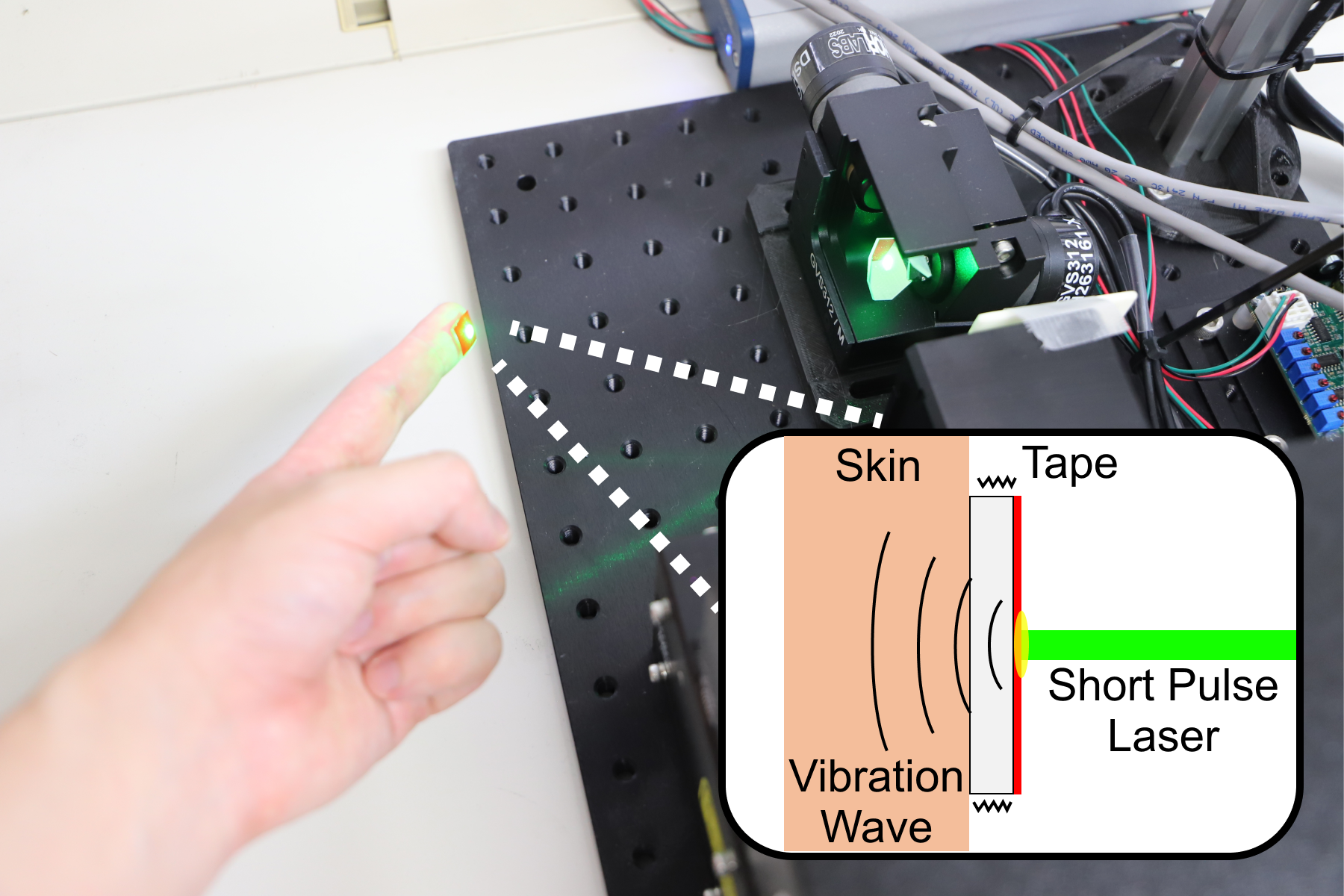
レーザー光照射による熱弾性効果を用いた空中触覚提示の性能評価
〇江口 満国(筑波大学)、松下 幸太郎(筑波大学)、平木 剛史(筑波大学、クラスター メタバース研究所) - 本研究では、高空間解像度をもちつつ周波数・強度を細かく調整可能な振動を提示可能とする空中触覚提示手法を提案する。この手法では、光吸収性の弾性媒体に短パルスレーザー光を照射することによって発生する熱弾性効果を触覚刺激として活用する。本発表ではレーザーのパラメータを変化させた時の弾性媒体の振動の周波数や強度を調査することで、周波数と強度の微細な調整ができるかを確認した。
- 1A2-03
-
指先による毛の知覚における太さと密度の影響に関する調査
〇倉持 直弥(電気通信大学)、櫻井 翔(電気通信大学)、野嶋 琢也(電気通信大学)、広田 光一(電気通信大学) - 仮想空間でリアルな触覚提示を行うために、提示面に毛構造を用いる方法が知られている。しかし、提示面に毛構造を用いると表現できる触覚の種類に限界が生じる課題がある。本研究では、毛構造を用いずに毛を知覚させるための基礎研究として、指先で毛構造に触れた際の人間の認識に着目し、毛構造がもつ特徴のうち毛の太さと毛の密度の2要素について、指先で毛と知覚する定量的条件と毛らしさの認識に与える効果を調査した。

- 1A2-04
-
単一のDCモータによるラケットへの衝撃感と反発感の提示
〇祖父江 迪瑠(電気通信大学)、加藤 総真(電気通信大学)、溝口 泉(電気通信大学)、梶本 裕之(電気通信大学) - HMD 等の普及によりVRスポーツの需要が高まっている。ラケット競技に着目すると、打撃感をはじめとする触覚を再現することは体験の質を向上させる。ラケット競技における打撃感は主に皮膚感覚が関与する衝撃感と、主に力覚が関与する反発感の2つに分解することができる。従来は、それぞれの感覚を提示するために2つの装置が使われることが多い 。それに対して本研究では、 単一のDCモータによって衝撃感と反発感の2つの感覚を提示する手法を提案する。

- 1A2-05
-
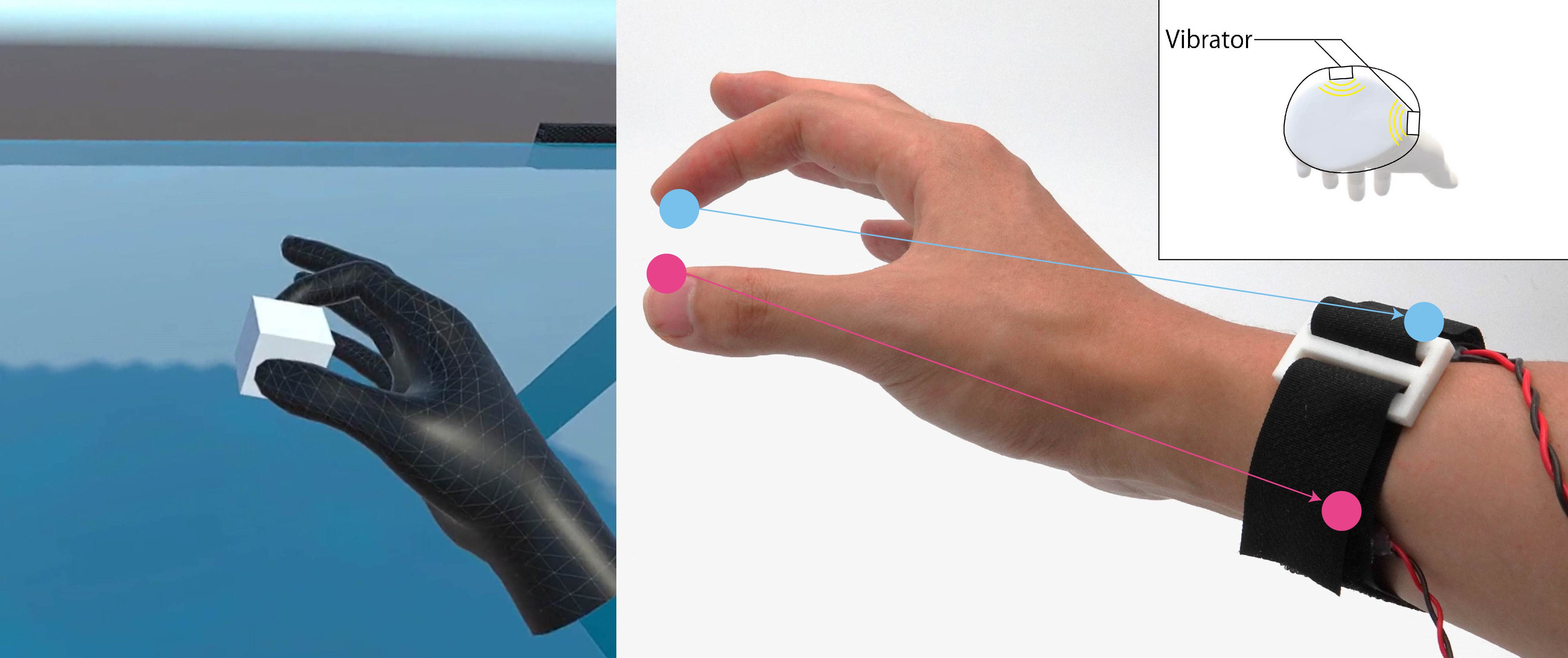
薄型直動アクチュエータを用いた異部位触覚提示デバイスの検討
〇秋葉 優馬(電気通信大学)、中山 翔太(電気通信大学)、溝口 泉(電気通信大学)、梶本 裕之(電気通信大学) - VR体験における触覚を簡便に表現する手法として,本来指先で感じる触覚を手首に提示する異部位触覚提示が多数提案されている.しかしながらこれらの多くは,持続的な圧迫から振動までの広帯域な触覚をコンパクトに実現することが難しいという問題がある.そこで本稿では,小型かつ圧覚と振動の両方を提示可能な薄型直動アクチュエータを用いた腕時計型デバイスを提案し,VR体験における有効性を検証する.
- 1A2-06
-
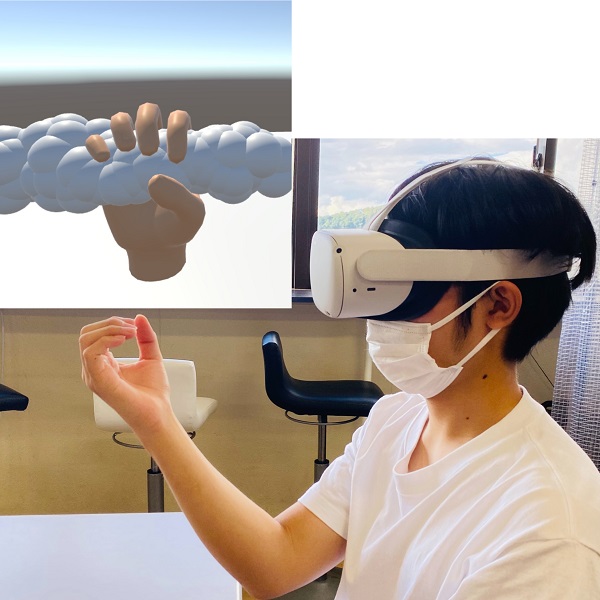
ハンドトラッキングによる多指へのPseudo-Haptics生起時における空中オブジェクト把持時の感覚知覚変容の調査
〇榮 晃太郎(熊本大学)、嵯峨 智(熊本大学) - 自発的な運動において自己受容感覚とずれのある視覚情報を提示することで,擬似的な触覚を生成できるPseudo-Hapticsが知られている.HMDと各指の独立したハンドトラッキングを用いて,多指にPseudo-Hapticsが生起した状態で棒状の空中オブジェクトの把持動作を行う.その際に,指ごとのC/D比の違いにより知覚される感覚分布の変化についての調査と,感覚分布に与える影響を考察する.
- 1A2-07
-
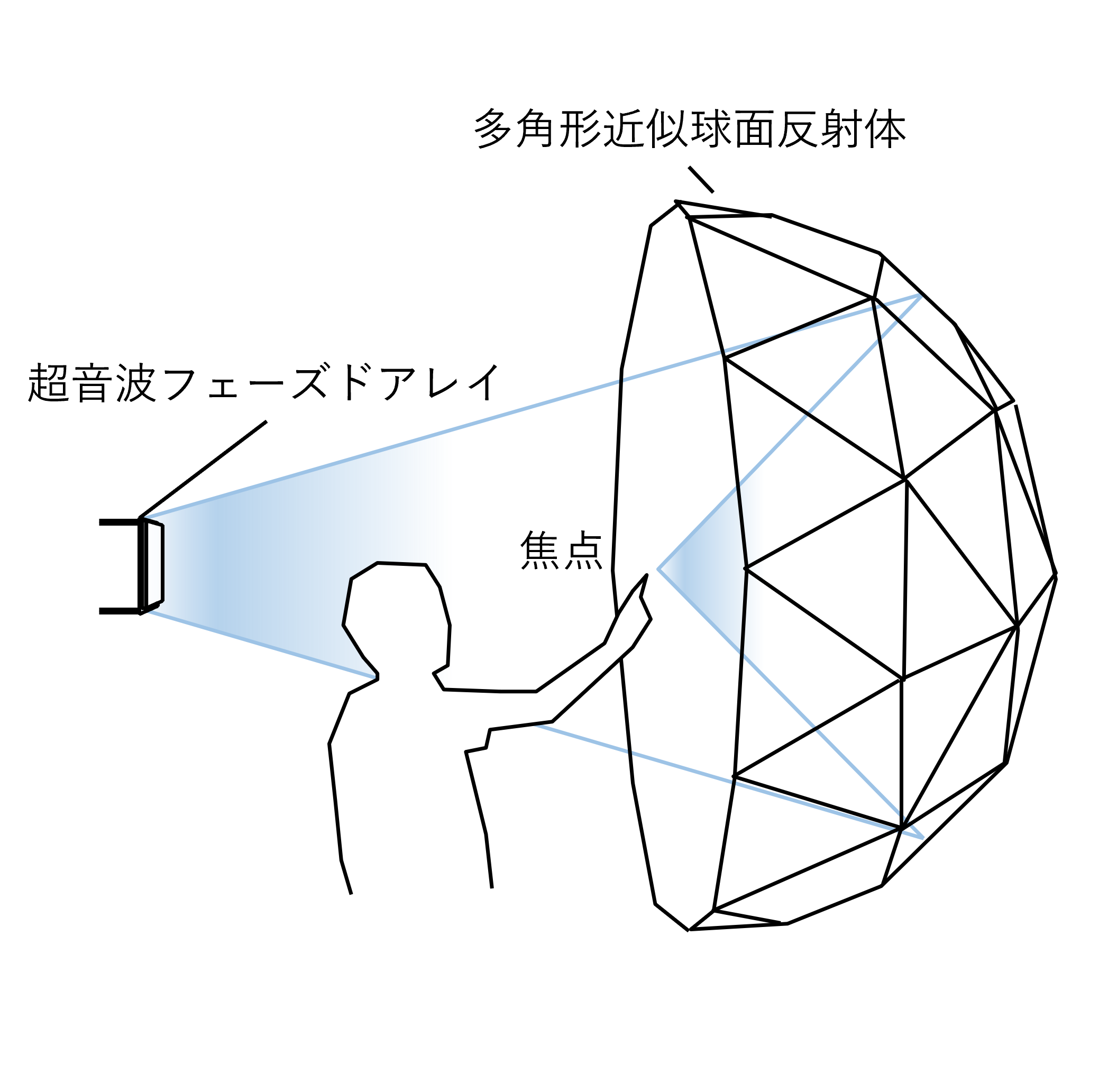
多面体近似球面反射体を用いた空中超音波触覚提示
〇有賀 健太朗(東京大学)、松林 篤(東京大学)、牧野 泰才(東京大学)、篠田 裕之(東京大学) - 空中超音波触覚提示に関して、凹面反射板を用いることでアレイ開口サイズ以上の位置に触覚を提示することが可能である。本研究では多面体近似球面反射体で代用する場合の集束性を検証する。反射波が一点に集束可能であるためには、導出された近似精度の条件を達成する必要がある。実機実験において、近似精度条件を満たした状態で反射波が一点に集束しかつ十分に知覚できるレベルの焦点音圧を達成することを確認した。
- 1A2-08
-
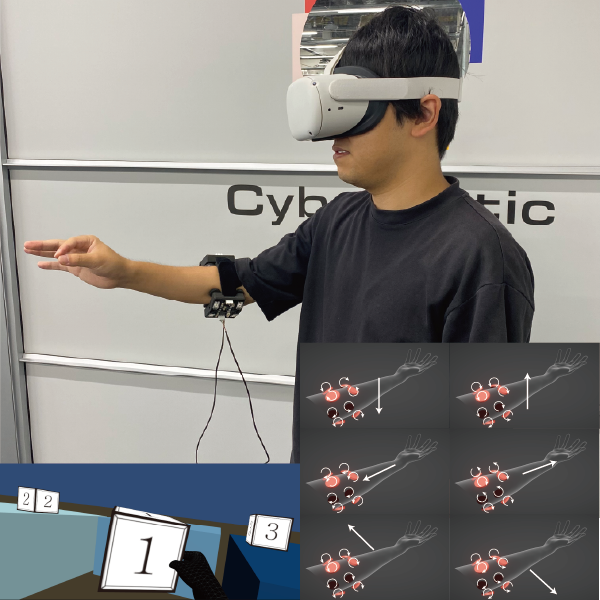
装着型Skin-Stretchデバイスを用いた物体の重量感提示に関する基礎検討
〇梅原 路旦(慶應義塾大学大学院メディアデザイン研究科)、堀江 新(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - xR体験において,物体の重量感を感じることは体験の質の向上に繋がる.皮膚のせん断による皮膚変形分布を提示するシステムが提案されている.一方,どのような皮膚変形分布を前腕部に提示することが重量感を生み出すかは自明でない.本研究では皮膚変形分布を提示可能な装着型Skin-Stretchデバイスを用いてバーチャルな物体の重量感を提示することを目指す.本稿では重量感を生み出す皮膚変形分布の基礎検討を行う.
- 1A2-09
-
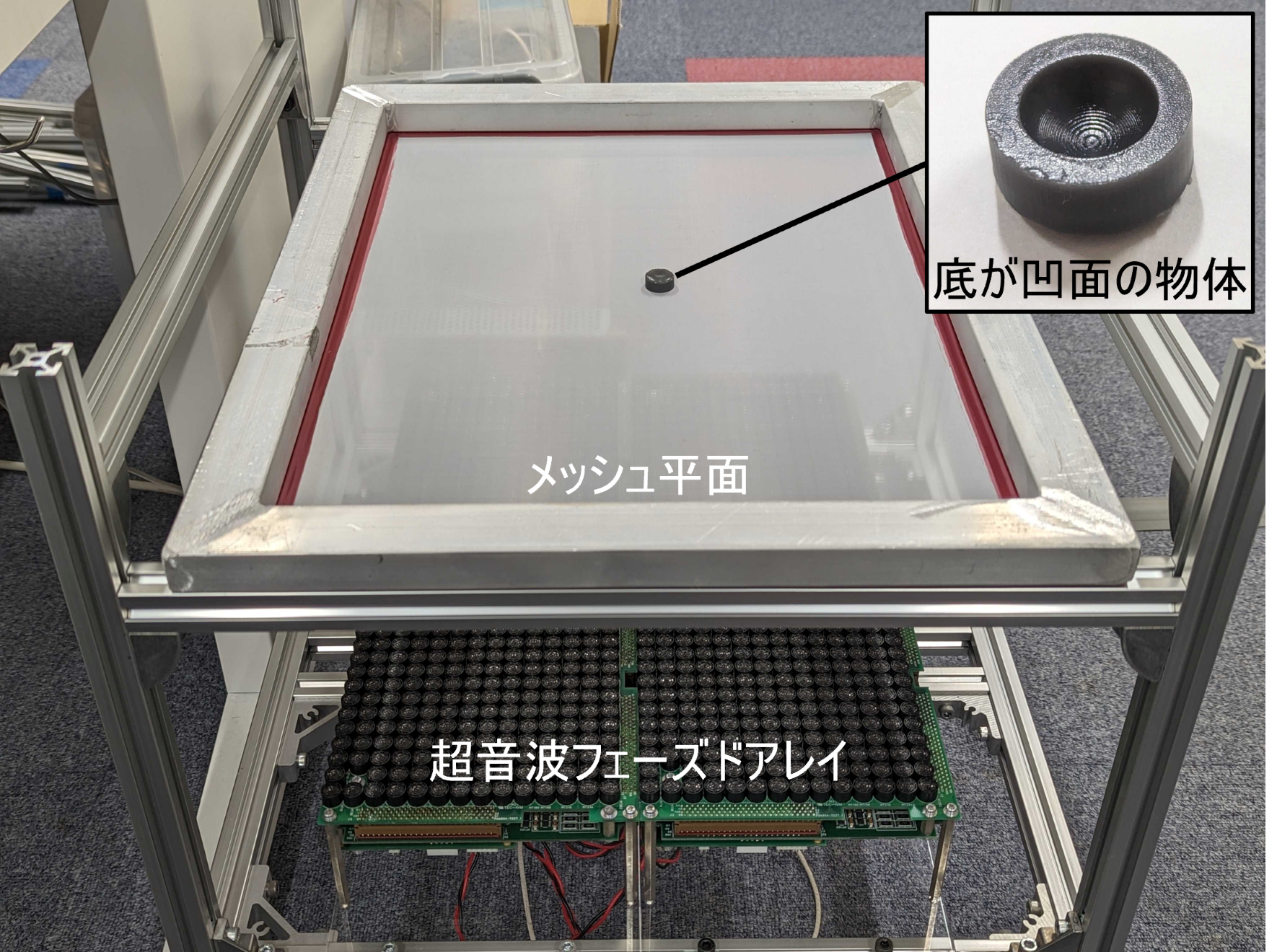
空中超音波によるメッシュ平面上の物体位置操作
〇荒川 岳斗(東京大学)、神垣 貴晶(東京大学)、牧野 泰才(東京大学)、篠田 裕之(東京大学) - 空中超音波フェーズドアレイを用いて,メッシュ平面上に置いた実物体を位置操作する手法を提案する.本手法は物体の底を特定の凹面形状に設計しておくことで,単一焦点の位置制御のみで物体を操作する簡便な方法である.操作対象に特殊な性質を必要とせず,またフェーズドアレイをメッシュ平面の下方に設置するためユーザの視野を遮らない.実験により提案手法の原理を検証し,操作の安定性を確かめた.
- 1A2-10
-
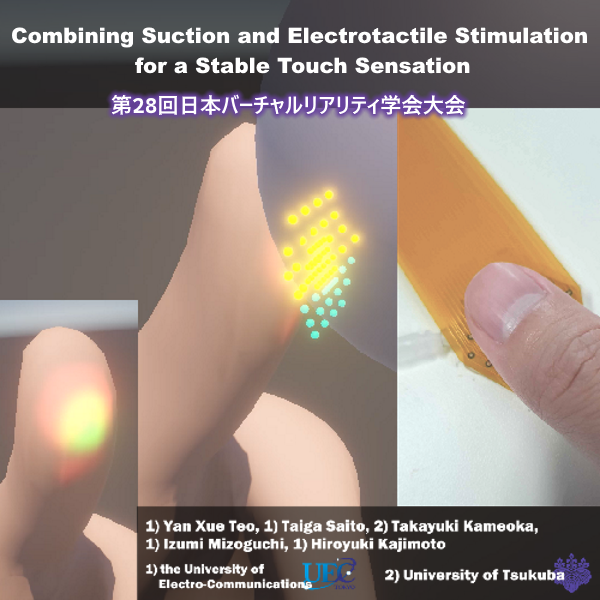
Combining suction and electrotactile stimulation for a stable touch sensation
〇張 延学(電気通信大学)、齋藤 大雅(電気通信大学)、亀岡 嵩幸(筑波大学)、溝口 泉(電気通信大学)、梶本 裕之(電気通信大学) - To create a compact haptic device to enhance interactivity, this study combined the high spatial and temporal resolution of electrotactile stimulation and the stable pressure sensation of suction pressure. It can of presenting enhanced contact sensation with surface area distribution with minimal discomfort.