Wednesday, 14 September
9月14日(水)
口頭発表 17:00-18:20 計測・認識・センサ
座長:北原 格(筑波大学)
- 3F5-1
-
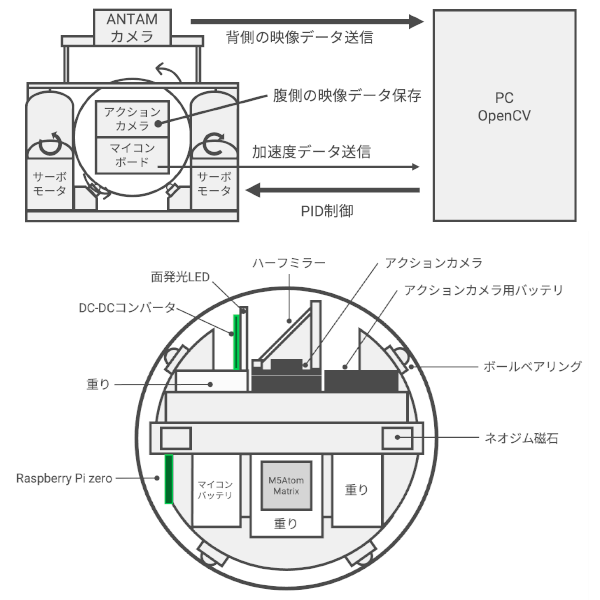
回転球殻内に配したカメラ姿勢安定化と振動計測による評価
〇田邊 匠(京都産業大学)、岡 凌平(京都産業大学)、森下 仁(京都産業大学)、永谷 直久(京都産業大学) - 腹側からの行動観察を可能にする装置の開発において、問題であった振動の抑制を行うために、回転球体内に配したカメラの姿勢を安定化させる機構の提案を行う。球体内に搭載する機体を磁石を使用して外側4点から固定し、手ぶれ補正機能の付いたカメラを搭載することで映像のブレを抑制する。 加速度センサを使用した球体内の機体本体振動と、球体内のカメラで撮影したマーカの重心座標の変化から振動の評価を行った。
- 3F5-2
-
ガラスを挟んだハンドトラッキングセンサの補正について -壁面ケースにおける展示方法の拡張-【オンライン発表】
〇荒屋 成美(富山大学)、辻合 秀一(富山大学) - 本研究では博物館・美術館の展示の幅を拡げるために,現在使用されている壁にガラスをはめ込んだ壁面ケースに対してハンドトラッキングセンサを併せて利用することができないか調査した.実際の展示にも用いられる高透過ガラスを使用した再現実験を基に,トラッキングセンサの一般的な利用環境とは異なる点から手の認識範囲にどの様な変化や問題が生じるか比較を行った.
- 3F5-3
-
DeeplabCut を用いたオカダンゴムシの腹側からの行動解析
〇岡 凌平(京都産業大学)、田邊 匠(京都産業大学)、永谷 直久(京都産業大学) - 動物の行動解析ツールとして、従来の手法よりも少ない学習コストで所望の身体部位の位置推定を実現するDeepLabCut(DLC)が注目されている。しかし、多関節の節足動物の運動に対して、DLCがどこまで適応可能かに関する実証例は少ない。本研究では、DLCをオカダンゴムシの腹側からの撮像データに対して適応する際の、撮像解像度と位置推定の精度の関係や、歩行に関わる付属肢の連動性に着目して解析を行った。

- 3F5-4
-
映像遅延および空間情報を制御可能な手の高速撮像・投影システムの構築
〇蛭間 友香(東京大学)、早川 智彦(東京大学)、石川 正俊(東京大学、東京理科大学) - 没入環境での身体感覚と視覚情報の差異がユーザーパフォーマンスに与える影響を評価するため,本研究では先行研究で開発された映像遅延制御装置に加え,新たに空間情報を制御するシステムを構築した.撮像された手を背景で上書きしCGに置き換える処理を行い,OpenCVとHALCONでは,後者が10倍高速で適切だと明らかにした.システムの最短遅延時間は約10msで様々な没入システムの仕様設計への利用が期待される.

- 3F5-5
-
Predicting finger position during midair visual-haptic interaction.
〇ZHANG Yue(東京大学)、藤原 正浩(東京大学)、牧野 泰才(東京大学)、篠田 裕之(東京大学) - This paper proposes a method to utilize the prediction of finger movement in haptic interaction through airborne ultrasound. Using the Autoregressive model confirmed that the predicted position of the fingertip at 200ms ahead can be estimated with an accuracy of 5mm or less.
