Monday, 12 September
9月12日(月)
口頭発表 15:30-16:50 力覚・体性感覚3
座長:佐瀬 一弥(東北学院大学)
- 1F4-1
-
カトラリーを介して手で感じる食品の触感再現システム
〇王 夫君(横浜国立大学)、岡嶋 克典(横浜国立大学) - VR空間内でカトラリーを用いる際の手で感じる食品の触感を再現可能なハプティックシステムを開発した。自動サーボスタンドを用いて実際の食品(豆腐、ケーキ、ステーキ等)のテクスチャ特性を測定し、触覚フィードバックデバイス(PHANTOM 1.0 Premium)の触覚定数に変換し、デバイスにナイフを取り付けて切る動作をすることで、実際に食品を切る触感を精度よくシミュレートできることを確認した。

- 1F4-2
-
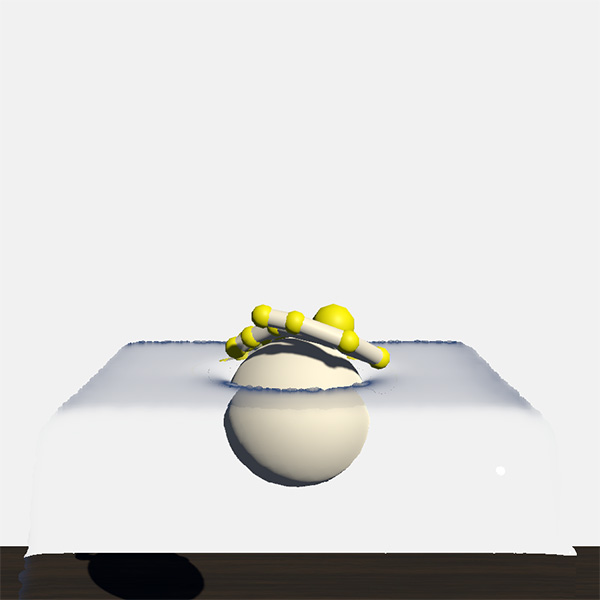
流体と剛体の連成シミュレーションを利用した視覚情報提示による浮力の疑似触知覚の生起
〇深谷 陸(明治大学)、福地 健太郎(明治大学) - 本研究では液体との作用を含めた仮想物体の力覚提示に関するPseudo-Hapticsの生起可能性を,浮力の力覚提示システムを構築することで検討した.提示する視覚情報に説得力を持たせるために流体と剛体の連成シミュレーションを用いることで,浮力力覚の強度を高めている.さらに,仮想物体に生起した浮力の力覚に対して視覚情報の調整を行うことで,仮想物体の力学的特性にバイアスをかけることへの可能性も検討した.
- 1F4-3
-
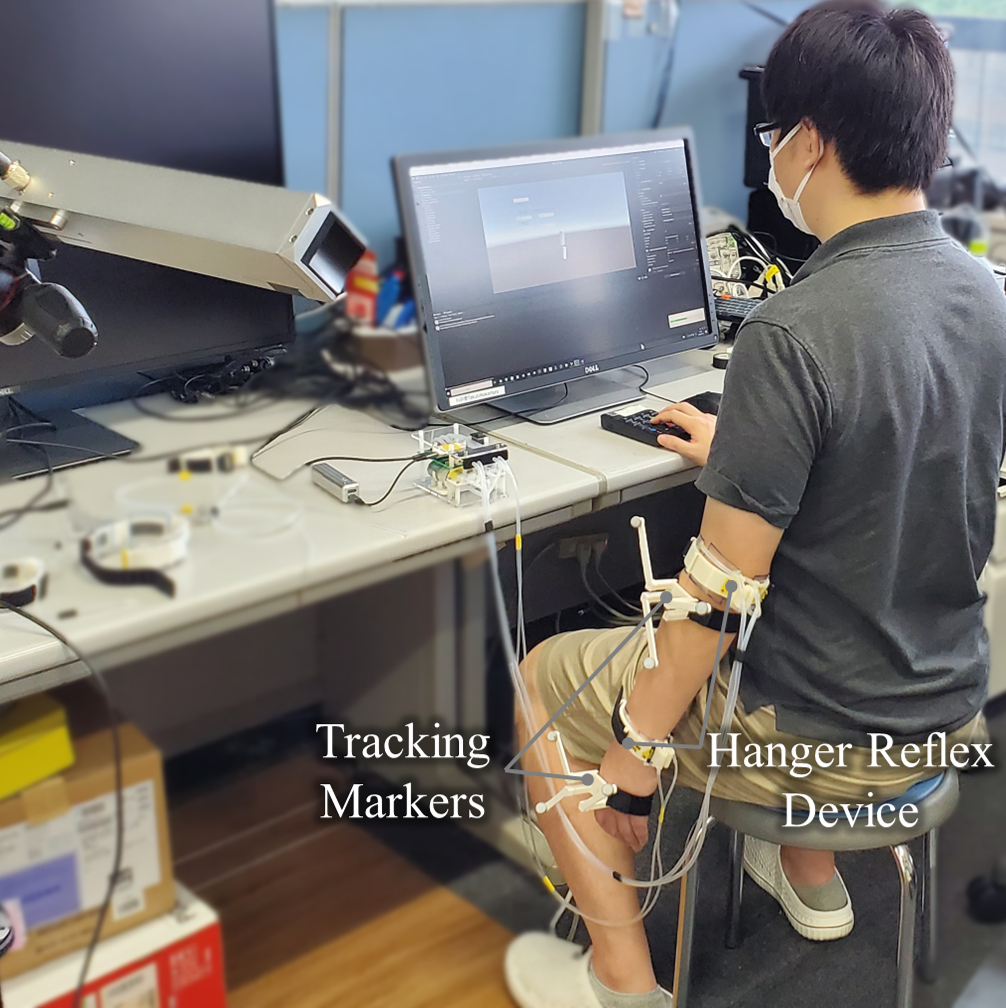
手首と肘でのハンガー反射同時提示時の腕計測
〇中村 拓人(東京大学) - ハンガー反射は強力な力覚を生起させる錯覚現象であり,身体の複数部位での発生が確認されている.一方,複数部位への同時提示による影響はあまり調べられていない.将来的な動作教示での協調利用などを考慮すると,同時提示時の特徴は必要な情報となる.よって,本研究では手首と肘へのハンガー反射を同時提示した際の腕の動きや被験者の知覚力覚方向を調査する.
- 1F4-4
-
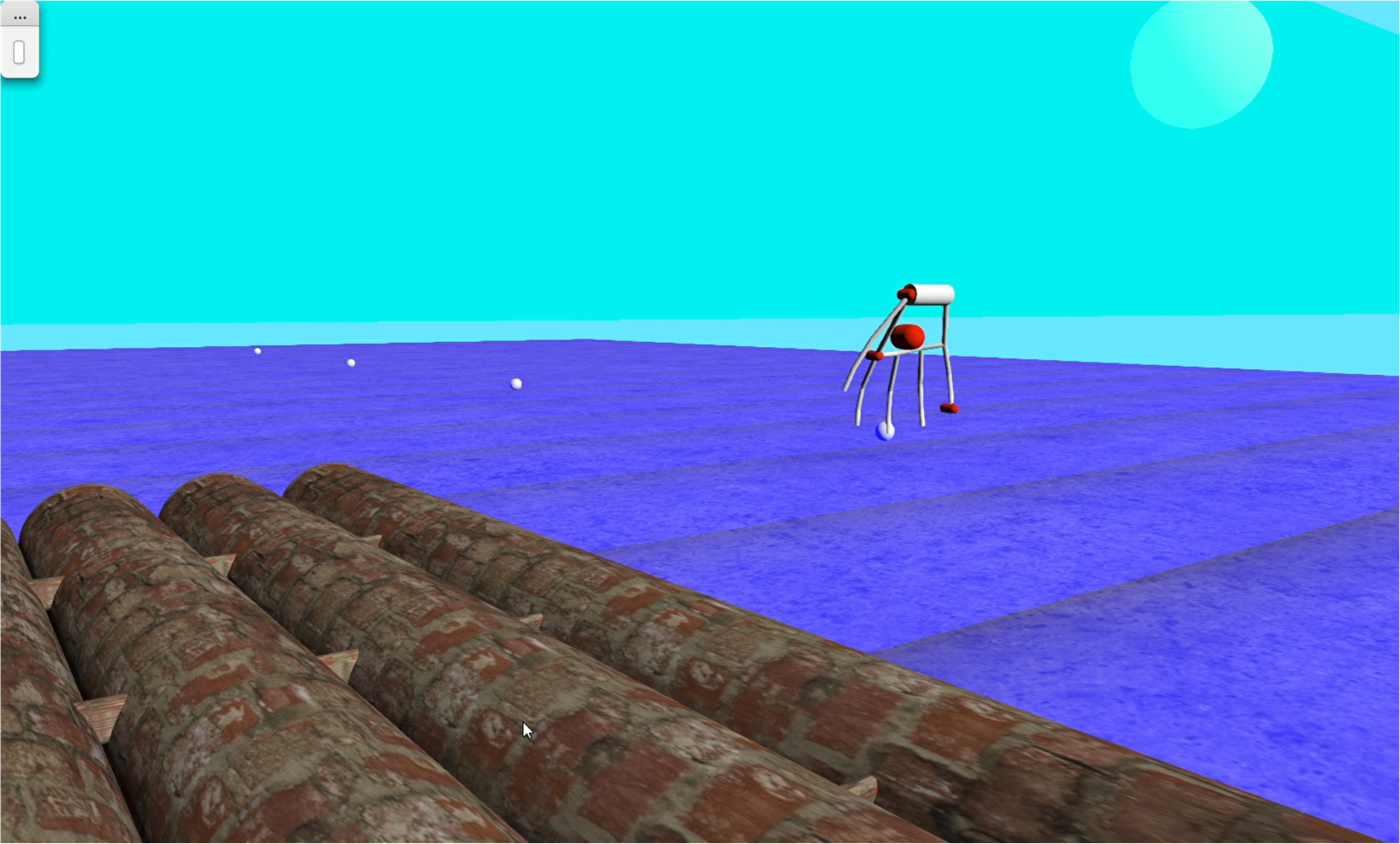
受動的運動による視覚刺激を用いた疑似力触覚提示に関する検討
〇阿部 法寛(公立千歳科学技術大学)、中山 雄介(公立千歳科学技術大学)、青木 広宙(公立千歳科学技術大学) - 視知覚と自己の運動との間に不整合が発生させることを視覚刺激として疑似力触覚の提示が行われるが,一般には,能動的運動時に視覚刺激の制御が行われる.本研究では,受動的運動による視覚刺激を用いた疑似力触覚提示について提案する.Leap Motionを用いて川の流れを体験する試作システムを構築し,同一の受動的運動による視覚刺激を制御した際の疑似力触覚生起に関して評価実験を行った.
- 1F4-5
-
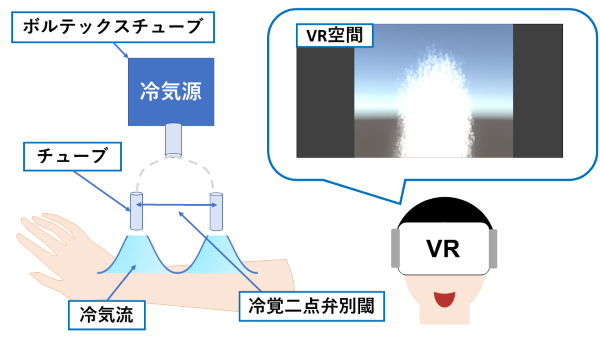
冷気流群による一体感のある冷空間VRシステムの開発
〇牧野 皓陽(筑波大学)、許 佳禕(筑波大学)、家永 直人(筑波大学)、金子 暁子(筑波大学)、黒田 嘉宏(筑波大学) - VRにおいて視覚に合わせた温度感覚提示を非接触で行えれば, 接触による違和感なく温度感覚を知覚できるためユーザのVR空間への没入感向上が期待される. 本研究では, 滝に腕を入れたような冷空間再現を目指し, 冷気流群による冷空間VRシステムの開発を目的とする. 本稿では, 一体感のある冷覚提示のため測定システムを用いて冷覚弁別限界の距離である二点弁別閾を調査し, それに基づき構築した冷空間VRシステムについて報告する.