Monday, 12 September
9月12日(月)
口頭発表 11:00-12:20 力覚・体性感覚1
座長:小玉 亮(豊田中央研究所)
- 1F2-1
-
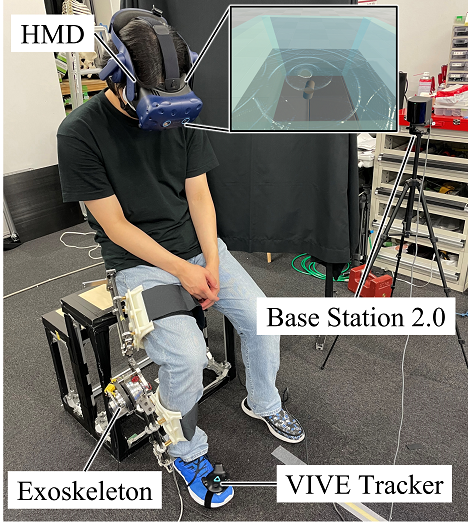
MR流体ブレーキを用いた下肢外骨格型力覚提示装置の開発と座位における水中での膝の運動感覚の評価
〇澤橋 龍之介(中央大学)、増田 大貴(中央大学)、西濵 里英(中央大学)、奥井 学(中央大学)、中村 太郎(中央大学) - VR 空間における現実感を向上させることを目的とした下肢外骨格型力覚提示装置の片足試作機を開発した.MR流体ブレーキを関節部に配置しており,トルク制御することにより摩擦力や粘性力を提示できる.本発表においては,簡易的な水中動作モデルを提案し,本装置により水中で膝を屈曲伸展したときの運動感覚について,現実感と抵抗力の観点から評価した.
- 1F2-2
-
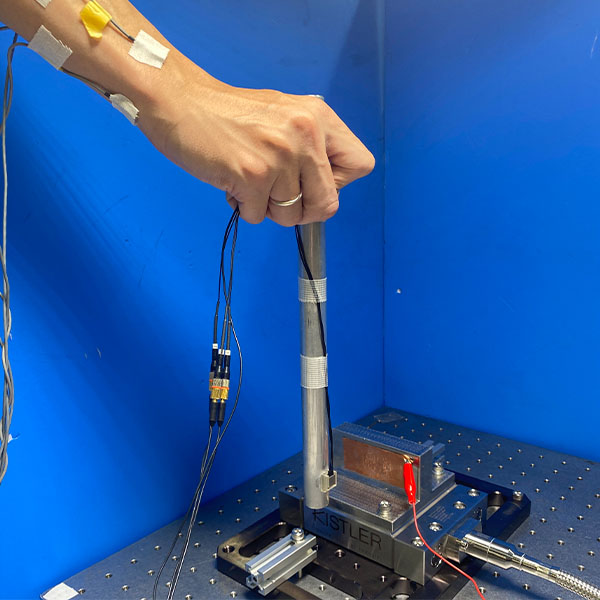
振動分布を再現する腕輪型触覚デバイスによる動作体感の伝達 ー第3報:振動分布の再現が接触力の弁別に及ぼす影響
〇松原 亨(東北大学)、昆陽 雅司(東北大学) - 本研究では,技能などの動作体感を伝える方法として,手先から手首に伝播する空間的な振動分布を取得し,再現として複数点刺激を用いるで,その効果を示してきた.前報では数種類の異なる接触動作において発生する振動の空間分布を利用することで,動作の弁別が向上することを確認した.本稿では接触の強度を識別する際に,空間分布の再現が弁別能力にどう影響するのかを調査した.
- 1F2-3
-
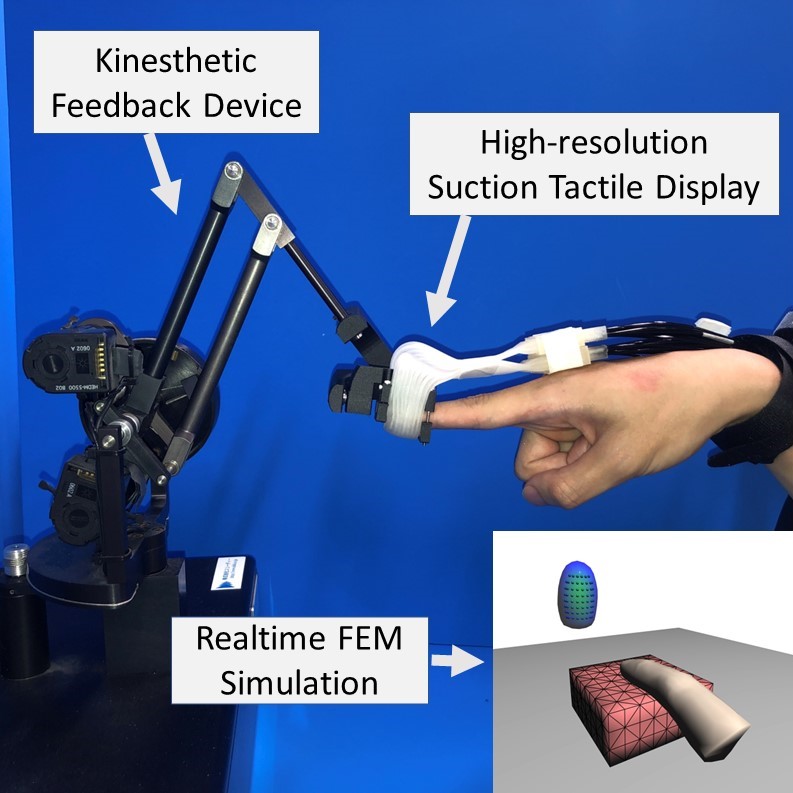
指腹部高解像吸引ディスプレイによる把持感覚の再現 第4報:1指への力触覚同時提示と硬軟感提示性能の評価
〇一條 暁生(東北大学)、森田 夏実(東北大学)、永野 光(神戸大学)、佐瀬 一弥(東北学院大学)、昆陽 雅司(東北大学)、田所 諭(東北大学) - 本稿では,一指における高解像吸引型皮膚触覚ディスプレイと力覚ディスプレイを統合することで, 触覚と力覚の独立提示が可能なディスプレイを開発した. 指腹部にかかる反力及び接触面圧力分布をシミュレーションによりリアルタイムで計算し,ディスプレイに反映させる事で力触覚を提示する. 硬軟感提示実験では触覚・力覚のみを提示した場合と力覚と触覚を同時に提示した場合を比較することで,力触覚統合の評価を行った.
- 1F2-4
-
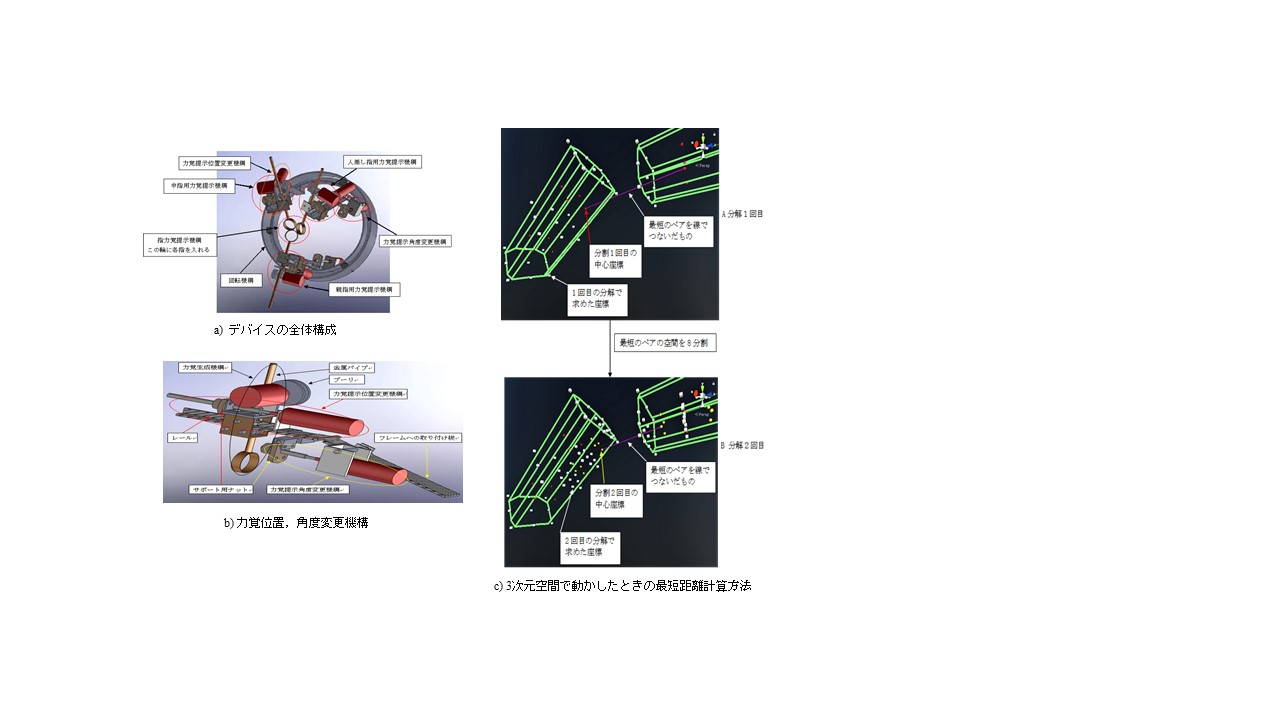
多重解像度モデルを活用した遭遇型力覚提示システムの開発
〇曽根 順治(東京工芸大学)、夏目 未来(東京工芸大学)、正田 大知(東京工芸大学)、長谷川 晶一(東京工業大学) - 3本の指に力覚を提示するシステムを開発している。このシステムは、力覚提示位置や力覚の角度を変更できる遭遇型のシステムである。力覚提示位置を効率良く実現するために、多重解像度モデルを活用して、接触前から接触位置を推定しながら、力覚提示位置を変更する機能を開発した。
- 1F2-5
-
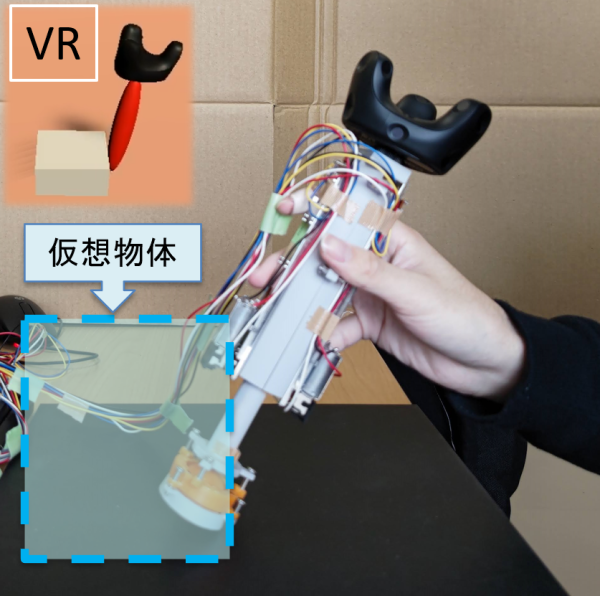
先端伸縮型仮想物体接触デバイスExtickTouchの拡張 -平面方向へのブレーキ機構の導入-
〇林 佑一(立命館大学)、クルス クリスチャン(立命館グローバル・イノベーション研究機構)、柴田 史久(立命館大学)、木村 朝子(立命館大学) - 我々は,仮想物体に触れた際に得られる接触感を再現するデバイス「ExtickTouch」の研究・開発を行ってきた.これは仮想物体の表面に合わせてデバイス先端が伸縮することで接触感を提示する.しかし,既開発のデバイスでは伸縮方向にしか力が提示できないという問題があった.そこで本稿では,デバイスの平面方向への移動に対して抵抗を発生させるブレーキ機構を導入し.これにより伸縮方向以外への接触感提示が可能となったので報告する.