Monday, 12 September
9月12日(月)
口頭発表 9:30-10:50 作業支援・評価
座長:脇田 航(広島市立大学)
- 1F1-1
-
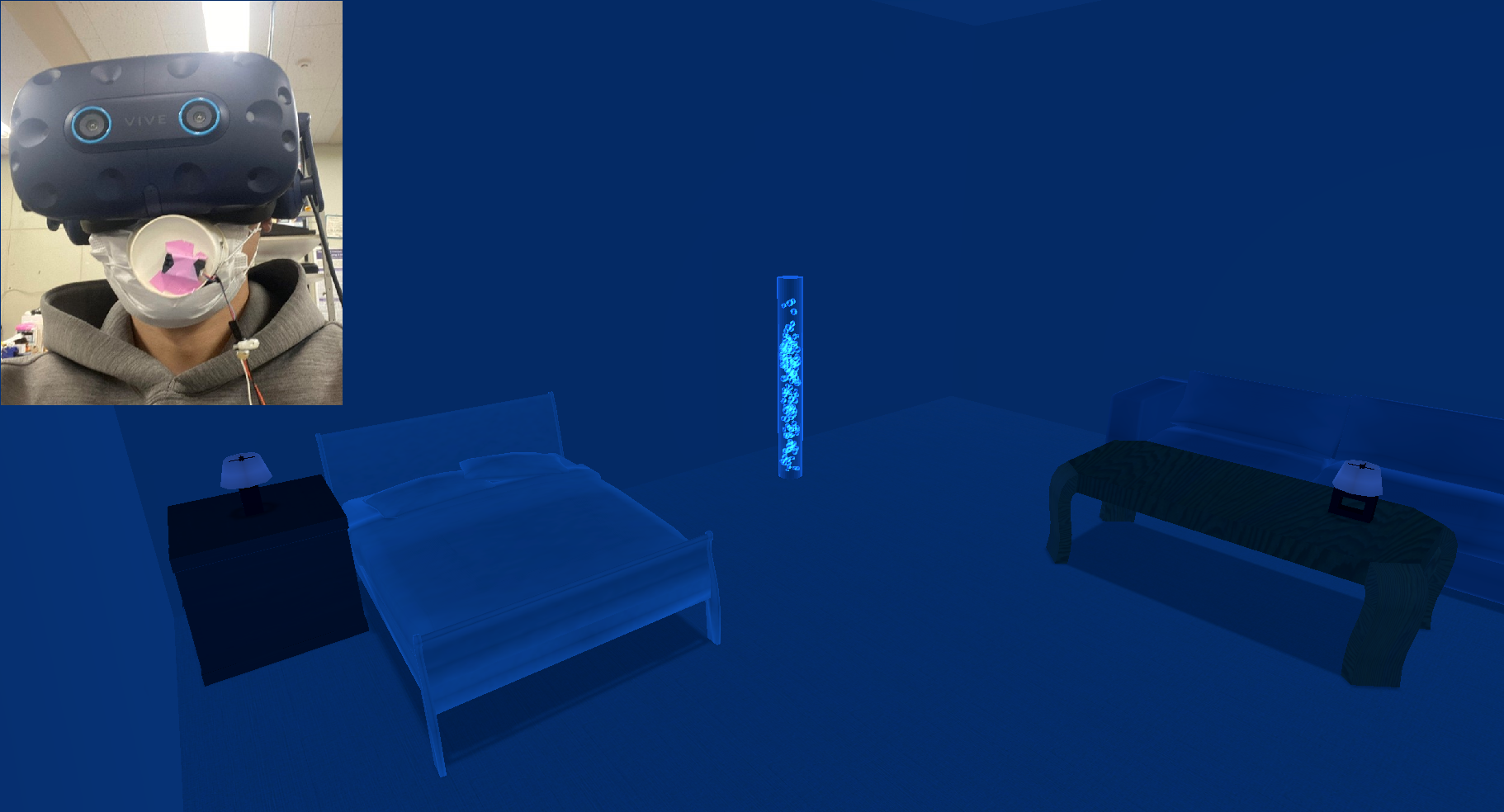
呼吸情報を用いたインタラクティブバーチャルセンサリールームの開発
〇大川 和己(筑波大学) - 感覚過敏の人たちへの支援方法の一つとして, センサリールームの利用が知られている. 本研究では, 呼吸情報に着目しインタラクティブに照明が変化するバーチャルセンサリールームを開発した. 評価実験として, 心拍情報を用いることで副交感神経活動への影響を評価し, 個人差はあるものの副交感神経活動優位の反応が生じ, システムの有効性が示唆された.
- 1F1-2
-
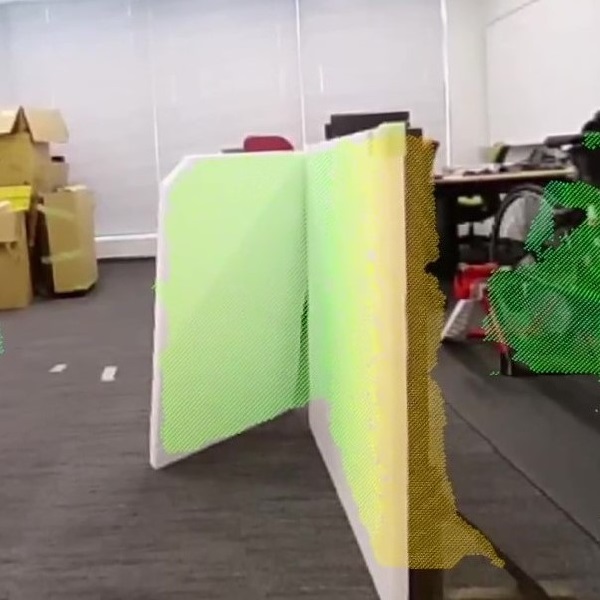
実物体と仮想物体のインタラクションを用いたMRコンテンツの提案
〇田中 昴(龍谷大学大学院)、橋口 哲志(龍谷大学大学院) - 現実空間と仮想空間を融合させる複合現実(MR)は仮想と現実を同時に認識できることから高い情報提示能力や表現能力を有している.このことから,アート・エンターテインメント分野のみならず多くの分野で注目されているが,このMRの強みを生かすことができる表現方法が確立されていない.そこで,本研究ではMRの表現方法を一事例として,現実と仮想の間で相互通信により,互いの状態に応じて制御し合うシステムを提案する.
- 1F1-3
-
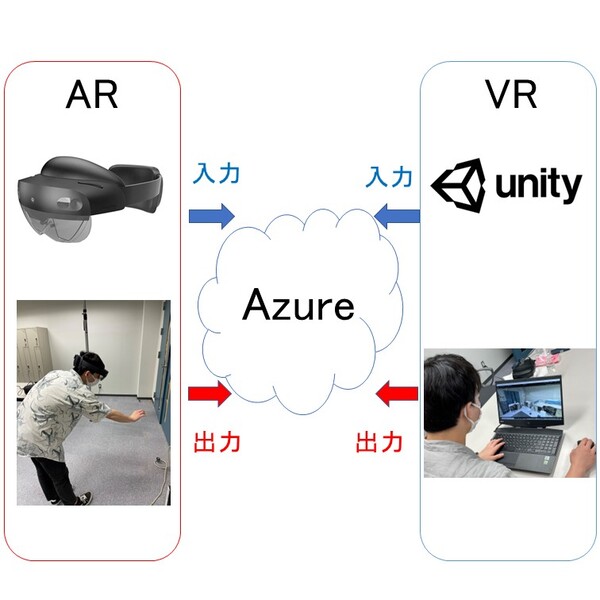
現実・仮想空間の双方を用いたナビゲーションシステムの提案
〇高島 祐輔(龍谷大学)、橋口 哲志(龍谷大学) - 近年,AR技術は観光などでナビゲーションとして応用されている.ナビゲーションは主に専門を有する技術者が作成するが,その場所に精通したナビゲーションを作成するには初心者でも作成できることが望ましい.そこで,HoloLens2とAzure spatial anchorsを用いて,初心者視点でのナビゲーション作成支援システムを開発した.加えて,現実空間で作成したナビゲーションを仮想空間にも反映させることで,オンラインで利用可能なシステムを提案する.
- 1F1-4
-
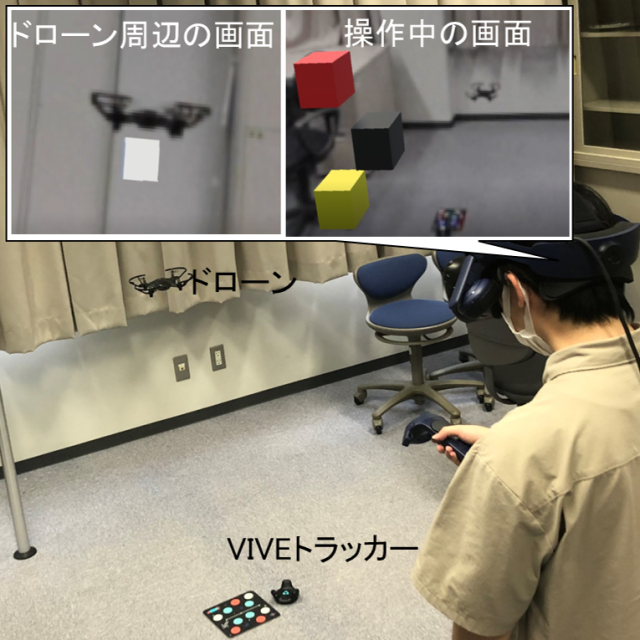
ロボットのVR遠隔操作における衝突危険度提示システムの開発
〇竹本 航亮(東京理科大学)、岡部 太亮(東京理科大学)、中村 文一(東京理科大学) - HMDを用いた360度映像体験は,ロボットの遠隔操作に際する没入感の向上に大きく寄与している.しかし,HMDで360度映像を見る際に用いられる球体の内側に画像を貼り付ける手法では,運動視差を得られず,衝突可能性のある近距離領域の距離感を掴みにくい.本研究では,深度センサによる3次元再構成と,制御バリア関数に基づく安全性指標による評価によって,遠隔操作時の衝突回避を目的とした危険度提示システムの開発を行う.
- 1F1-5
-
触覚ディスプレイの比較評価を目的とした共通体験サンプルの試作と検討
〇岡 拓也(明治大学大学院)、森本 浩輔(明治大学)、簗瀨 洋平(ユニティ・テクノロジーズ・ジャパン株式会社)、渡邊 恵太(明治大学) - ユーザに触覚フィードバックを与えるディスプレイが多く提案されているが,実験環境の違いからディスプレイ間での比較が難しい.そこで,既存研究調査を基にフィードバックするものの特性を分類し,各々の特性の表現に必要な仮想オブジェクトやシーンを集めた共通体験サンプルを試作する.さらに,提案サンプルを用いたディスプレイの評価手法を検討し,複数ディスプレイ間の比較評価を目指す.
