Wednesday, 16 September
2020/9/16(水)
一般発表 13:00-14:20 触力覚(体性感覚・疑似力覚)
座長:田中 由浩(名古屋工業大学)
- 1D3-1
-
- 力覚提示時に視覚刺激による誘導によって重畳される疑似力覚の定量化
〇船引 大輝(関西学院大学大学院 理工学研究科)、山﨑 陽一(関西学院大学 感性価値創造インスティテュート)、井村 誠孝(関西学院大学 理工学部) - 疑似力覚提示を利用した力覚提示デバイスの開発において,視覚刺激による誘導が多く利用されているが,複合提示した際に体験者に知覚される力の大きさを定量的に決定する要因は明らかではない.本研究では,視覚刺激による誘導を付与した力覚提示の主観的な力の大きさを,体験者に力覚提示のみで再現させ,各条件の力覚提示デバイスの出力の大きさの差から,視覚刺激の誘導によって知覚される力の大きさを定量化する.
- 1D3-2
-
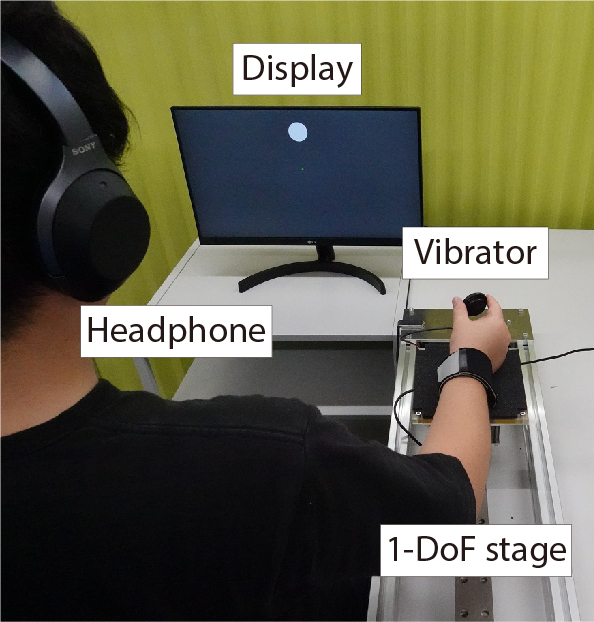
- 到達運動における牽引力錯覚の基礎的検討
〇田辺 健(国立研究開発法人産業技術総合研究所)、近井 学(国立研究開発法人産業技術総合研究所)、遠藤 博史(国立研究開発法人産業技術総合研究所)、井野 秀一(国立研究開発法人産業技術総合研究所) - ヒトは非対称な振動を指先に提示された時,振動を一方向に牽引される力として錯覚する(牽引力錯覚).これまで牽引力錯覚は皮膚感覚由来の錯覚現象であることが議論されてきたが,上肢の能動的な運動によって錯覚の感度が高まることも報告されている.つまり,牽引力錯覚時には感覚系のみならず運動系を含めて情報が処理されていると考えられる.そこで本研究では,牽引力錯覚が上肢運動に与える影響を明らかにすることを目的とし,上肢運動の中でも到達運動に着目した予備実験を行った.予備実験の結果,牽引力錯覚は運動の軌跡には影響しなかったが主観的な運動の随意性には影響する可能性が示唆された.
- 1D3-3
-
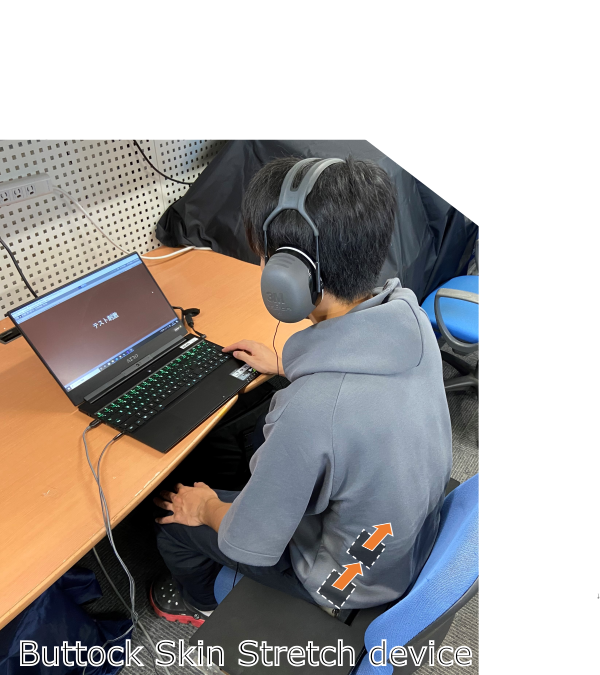
- 臀部スキンストレッチにおける定常刺激に対する順応の調査
〇矢内 智大(東北大学)、昆陽 雅司(東北大学)、堀江 新(東京大学)、田所 諭(東北大学) - 我々はこれまで臀部スキンストレッチと呼ばれる,臀部皮膚の一部をせん断変形させることで臀部に疑似力覚を提示する手法を研究してきた.本研究では,臀部スキンストレッチで定常刺激を提示する際の順応の影響について調査を行った.その結果,一定の皮膚変位を提示し続けると知覚される刺激量が減少することが示唆された.また,皮膚変位を少しずつ大きくすることで知覚的に一定の刺激が提示出来る可能性が示唆された.
- 1D3-4
-
- テープと輪ゴムを使用したハンガー反射現象再現の検討
〇宮上 昌大(電気通信大学)、梶本 裕之(電気通信大学) - 頭に針金ハンガーを装着することで頭部が不随意に回旋するハンガー反射現象が報告されている.ハンガー反射現象は頭部の対抗する2点を圧迫し,その圧迫によって生じた皮膚のせん断変形によって生起すると考えられている.本稿では,頭部に対する刺激をテープと輪ゴムによる皮膚せん断変形のみに限定した場合のハンガー反射現象の生起頻度等を検討する.

- 1D3-5
-
- 手首関節の運動錯覚に及ぼす筋腱の緊張状態の影響
〇小村 啓(九州工業大学)、久保 拓夢(名古屋大学)、本多 正計(静岡県工業技術研究所)、大岡 昌博(名古屋大学) - 脳血管疾患に対するリハビリロボットの開発が期待されている.本研究では,運動錯覚を利用したリハビリシステム構築のために,運動錯覚を最大化する刺激条件の調査を実施する。運動錯覚は振動刺激を腱に与えることで生起するという特性上,腱の振動特性と運動錯覚の刺激条件の間に重要な関係があると考え調査を実施した.調査の結果,両者に相関は確認されず,腱の状態によらず最適な振動刺激条件は一定であることが分かった.
- 1D3-6
-
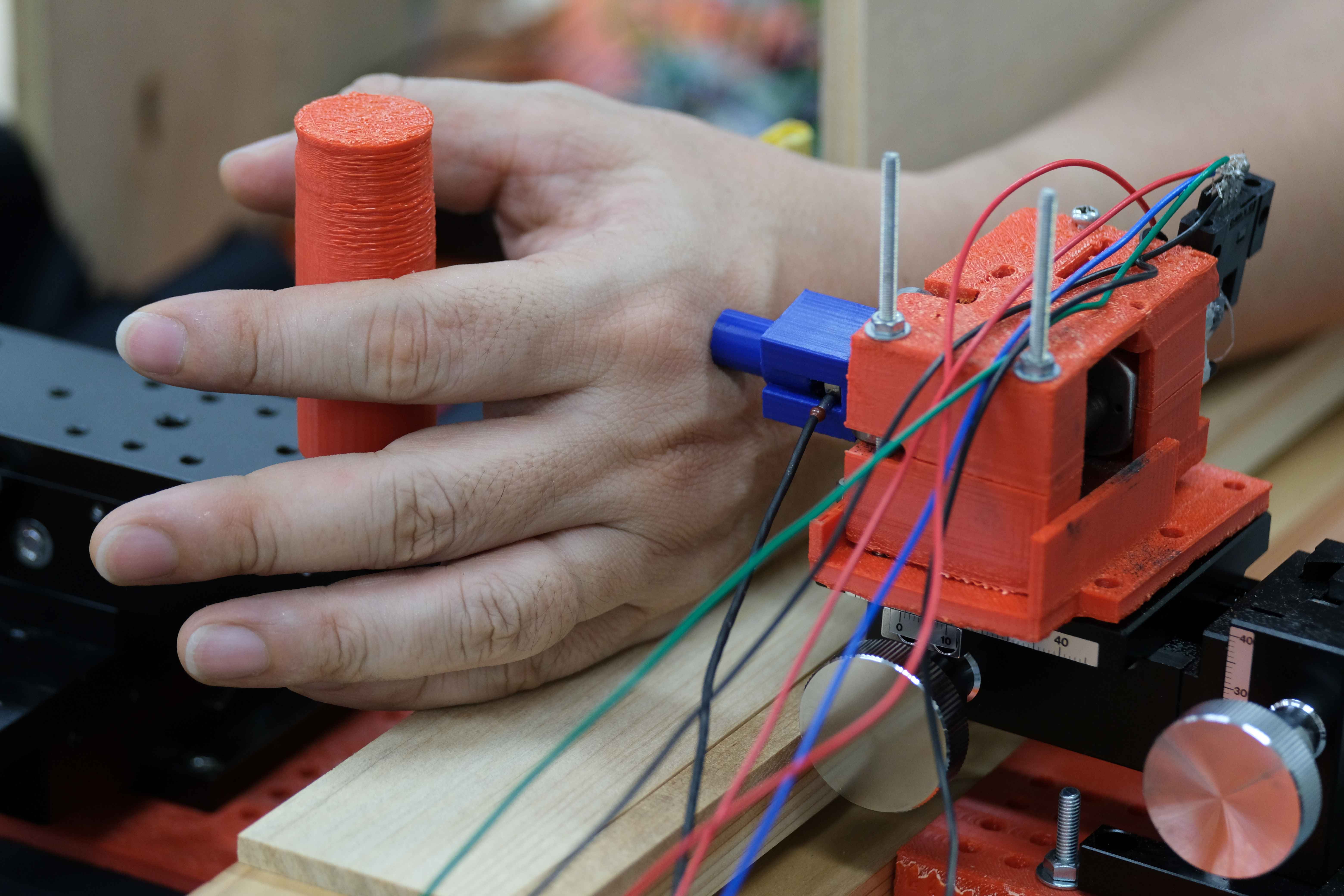
- 腱振動刺激による運動錯覚の物体接触による質的制御の検討
〇與野 航(関西学院大学大学院 理工学研究科)、山崎 陽一(関西学院大学 感性価値創造インスティテュート)、井村 誠孝(関西学院大学 理工学部) - 本研究の目的は,腱への振動刺激により体が動いたように感じる運動錯覚を利用した力触覚提示技術の確立である.振動刺激提示時に体の一部が物体に接していると異なる複合的な錯覚が生起することに着目し,運動錯覚と他刺激の統合による錯覚の内容と生起条件を明らかにする.左手示指第3関節屈曲運動錯覚と同指末節への物体接触感覚を同時提示する実験の結果、物体接触位置に応じて物体から受ける抵抗感に有意な差が見られた.
- 1D3-7
-
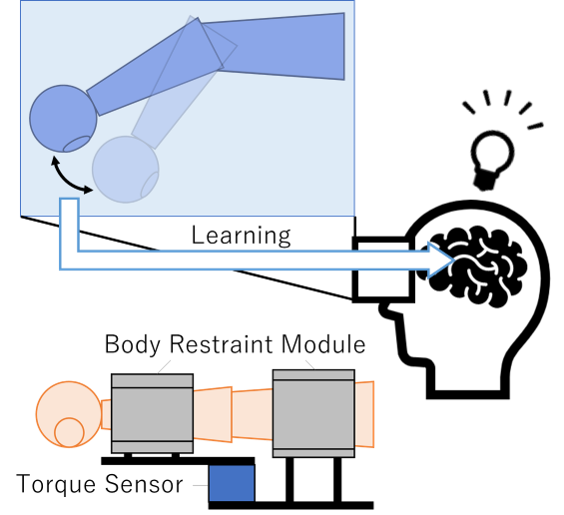
- Motion-Less VRの研究:バーチャル腕における肘関節の粘弾性変化に対するユーザの適応能力の調査
〇小山 千皓(法政大学)、望月 典樹(法政大学)、中村 壮亮(法政大学) - リアル身体での運動を必要としない身体没入型VRシステム「Motion-Less VR」では,身体固定状態での関節発揮トルクを入力とした動力学によりバーチャル身体の運動が実現される.このとき動力学モデルの関節には運動の安定化や可動域表現のために粘弾性が付与されるが,これを変更した際の影響について先行研究では言及されていない.本研究では初期検討として,多様な粘弾性に対するユーザの適応能力の調査を行った.