Sept. 13 2024
9月13日
口頭発表 10:10-10:50 身体性認知2
座長:柴田 史久(立命館大)
- 3D2-01
-
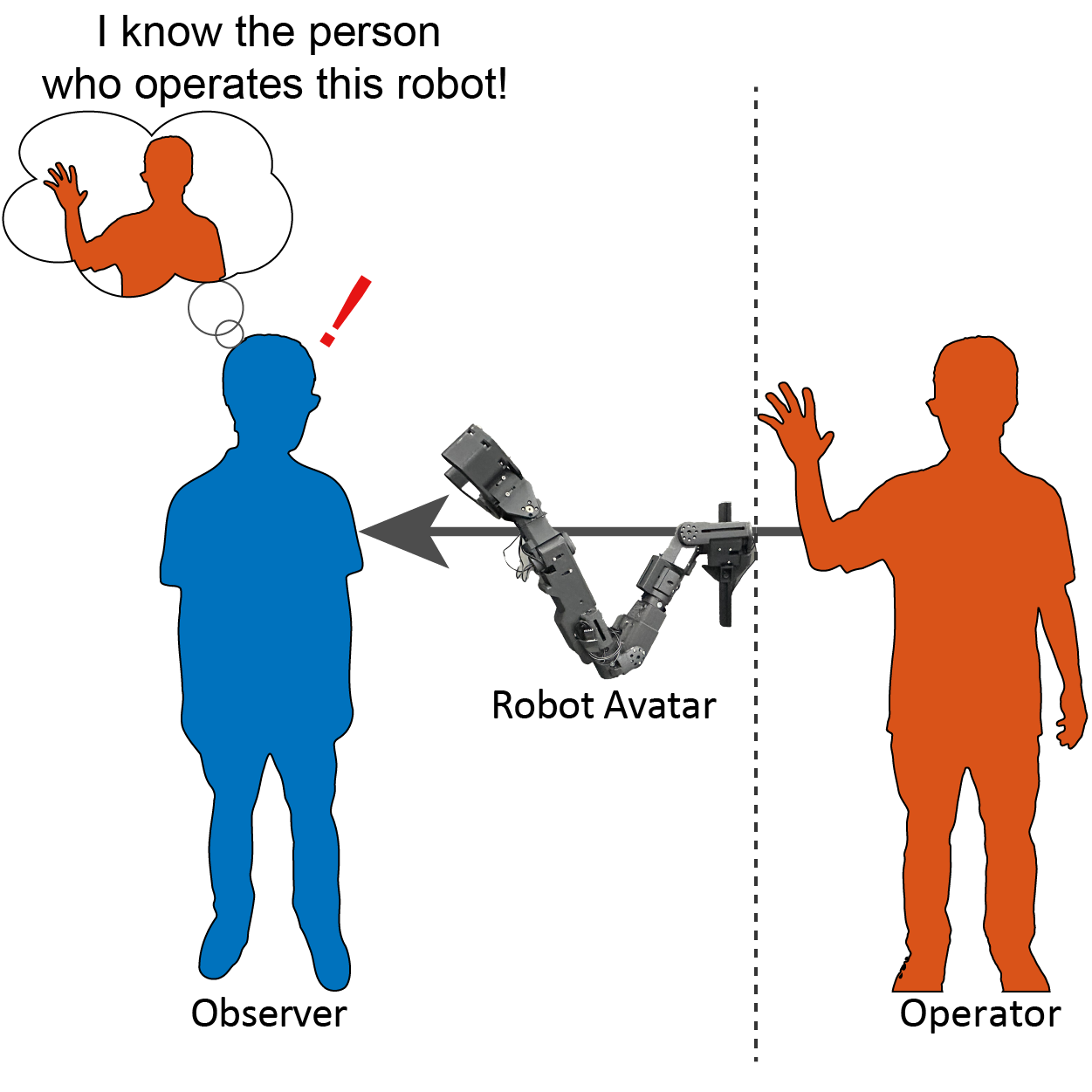
ロボットアバターの設計における個人の運動特性の反映による存在感表出の予備的検討
〇味岡 俊嘉(慶應義塾大学大学院メディアデザイン研究科)、萩原 隆義(慶應義塾大学大学院メディアデザイン研究科)、安藤 良一(慶應義塾大学大学院メディアデザイン研究科)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、脇坂 崇平(慶應義塾大学大学院メディアデザイン研究科)、吉藤 健太朗(株式会社オリィ研究所)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - ロボットアバターは操作者の存在を他者に感じさせることができる.しかし,他者から見て操作者が誰なのかを認識できるような,個性の表出が可能な条件については明らかではない.本研究では,ロボットアームを手動で動かすことによって動作を記録,再生し,操作者の存在感を提示するシステムを開発した.その動作から他者が操作者の存在を感じるか,認知的変化が生起するかについて予備的検討を行った.
- 3D2-02
-
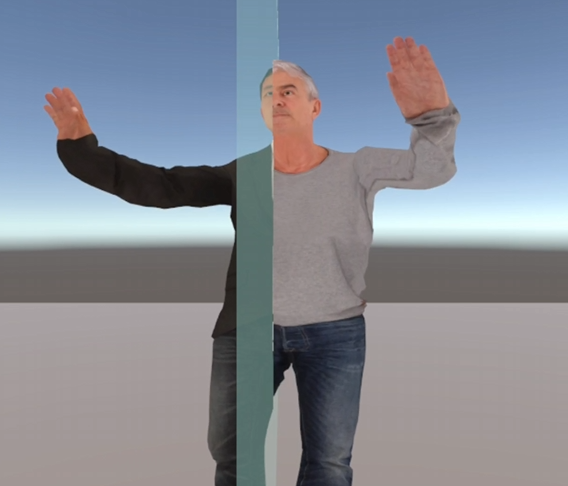
能動的なアバタ―変身がバーチャル身体化に及ぼす影響
〇村上 太一(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - これまでの身体化研究では、実世界の身体とは異なる外観をもつアバタへ身体化することによる変身の可能性が示されてきた。一方で、それらのアバタはユーザへ受動的に突然与えられており、ユーザが変身そのものへ作用する方法については調べられていない。そこで、本研究ではユーザの意図や能動性を変身に反映可能な変身プロセスを作成し、身体化感覚とユーザビリティへ与える影響について調べた
- 3D2-03
-
手足のみアバターによる疑似軟体所有感の誘発
〇廣瀬 修也(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - 手と足のみが自己身体と連動して動くアバターを観察すると、透明な身体が補間されて知覚され、それに身体所有感を感じる。ただし、手と足のアバターの位置をスクランブルすると全身所有感が失われ、部位所有感のみが生じる。本研究では、手と足の空間的配置は崩さずにそれらの間を線で繋ぐことで、疑似的な軟体所有感を誘発できることを報告する。

- 3D2-04
-
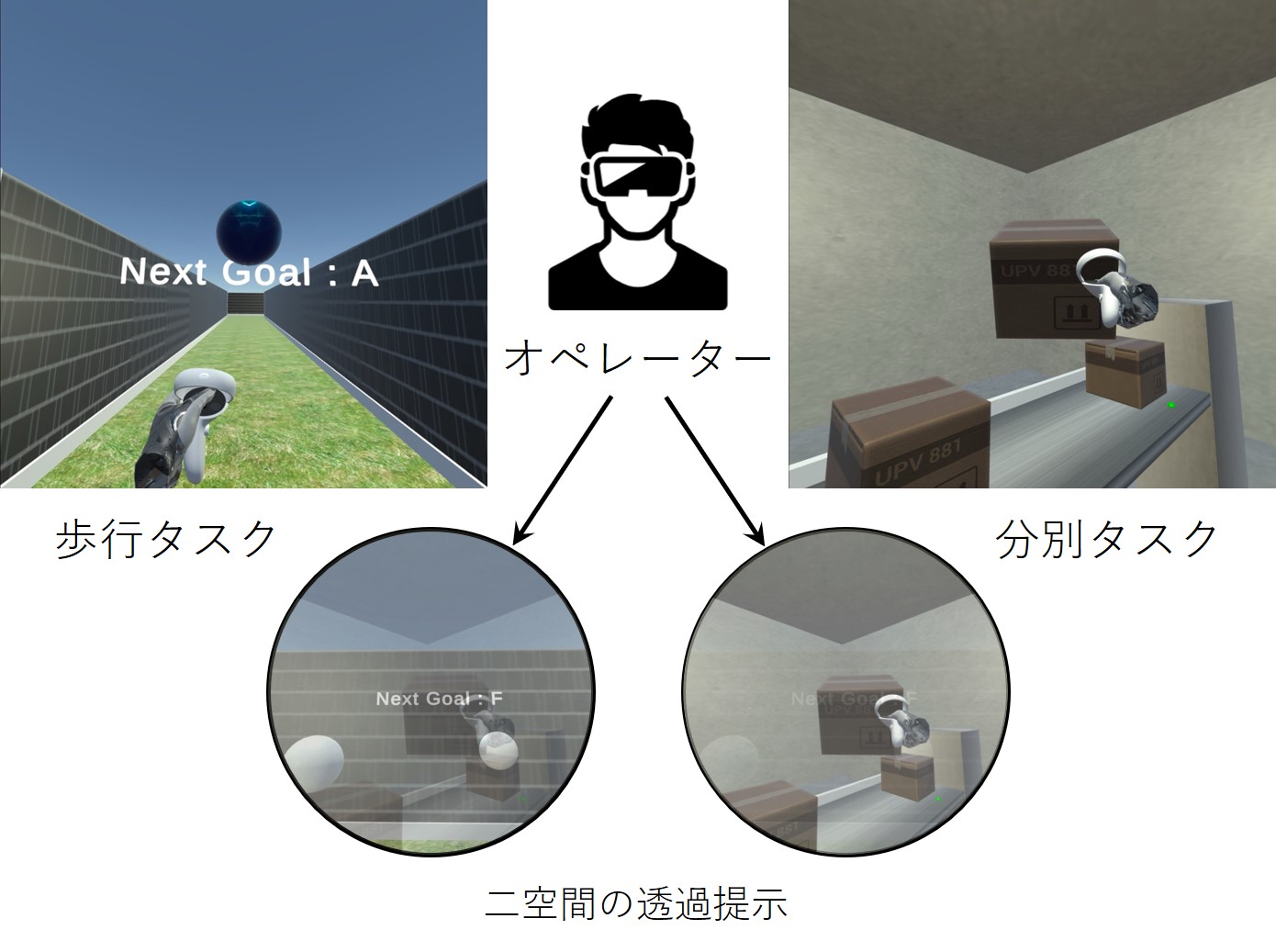
空間提示手法と指令入力手法の違いがVR空間での多重身体認知に及ぼす影響
〇芹澤 尚舜(東京都立大学大学院)、西内 信之(東京都立大学大学院)、福地 庸介(東京都立大学大学院)、YEM VIBOL(筑波大学)、池井 寧(東京大学) - 一人のオペレータが複数の遠隔空間の代理身体を操作するシステムが可能となれば,時間効率向上等の観点から社会的意義が大きい.そこで複数空間の提示手法(同時,切替,透過)及び代理身体に対する指令の入力方法(ボタン,音声)に依存した,多重身体認知の特性解明を目的としてユーザスタディを行った.質問紙で評価した結果,空間提示手法における透過提示が複数空間に存在する感覚を向上させていることが確認された.
- 3D2-05
-
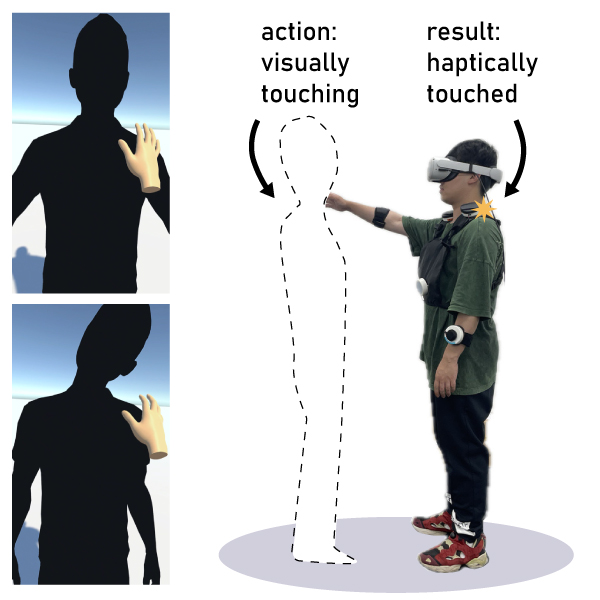
ユーザーと異なる動きをするアバターへの身体性錯覚の予備的検討
〇中村 壮一(慶應義塾大学大学院メディアデザイン研究科)、脇坂 崇平(慶應義塾大学大学院メディアデザイン研究科)、梅原 路旦(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - ユーザー自身と同様の動きをするアバターへと身体性を転移することを目的とした様々な身体錯覚手法がこれまで提案されてきた.だがユーザーと同じ動作をしない人型アバターへと身体性を転移する手法開発は進んでいない.本研究では,ユーザーが自身とは異なる動作をする人型アバターに対しユーザー側から能動的に触れ,アバター側が感じるであろう触覚をユーザーにフィードバックするという手法を提案する.そのアバターとのインタラクションから生じるユーザーの身体錯覚および応用について予備的検討を行った.
- 3D2-06
-
自動表情変化アバタが及ぼす身体化感覚への影響
〇岡田 稜(明治大学)、三武 裕玄(明治大学) - アバタの表情は手の操作や顔トラッキングにより使用者が動作させるのが普通であるが, 他人からの接触を検知して自動で表情が変化するアバターも最近活躍している。こうした自動動作はアバターの身体化感覚を低下させ没入感を削いでしまう可能性がある。本研究では自動表情変化の使用時の身体化感覚について, 手の操作による表情変化の習熟度合や顔トラッキング使用の有無等の条件間で比較し, 影響を明らかにするとともに, 身体化感覚の低下が少ない自動表情変化を検討する。

- 3D2-07
-
半拘束型掌力触覚提示デバイスの基礎的検討 ー 示指の多様な動きへの対応化
〇吉田 大葵(富山県立大学)、田川 和義(富山県立大学) - 本研究では,1) 手指の複雑かつ多様な動作を許容しつつも, 2) 掌全体への力触覚提示をも可能とする新たな力触覚提示デバイスの実現を目指し,1) と 2) を両立させる方法として, 実際には自分の手は少ししか動いていないが, 仮想の手が大きく動く視覚情報を与えることで, 自分の手が大きく動くような運動知覚へと変容させる方法を用いる.これにより,掌全体への力触覚提示の難易度を軽減する.本稿では,示指の伸展・屈曲・内転・外転の運動知覚変容に関する実験を行った結果について述べる.

- 3D2-08
-
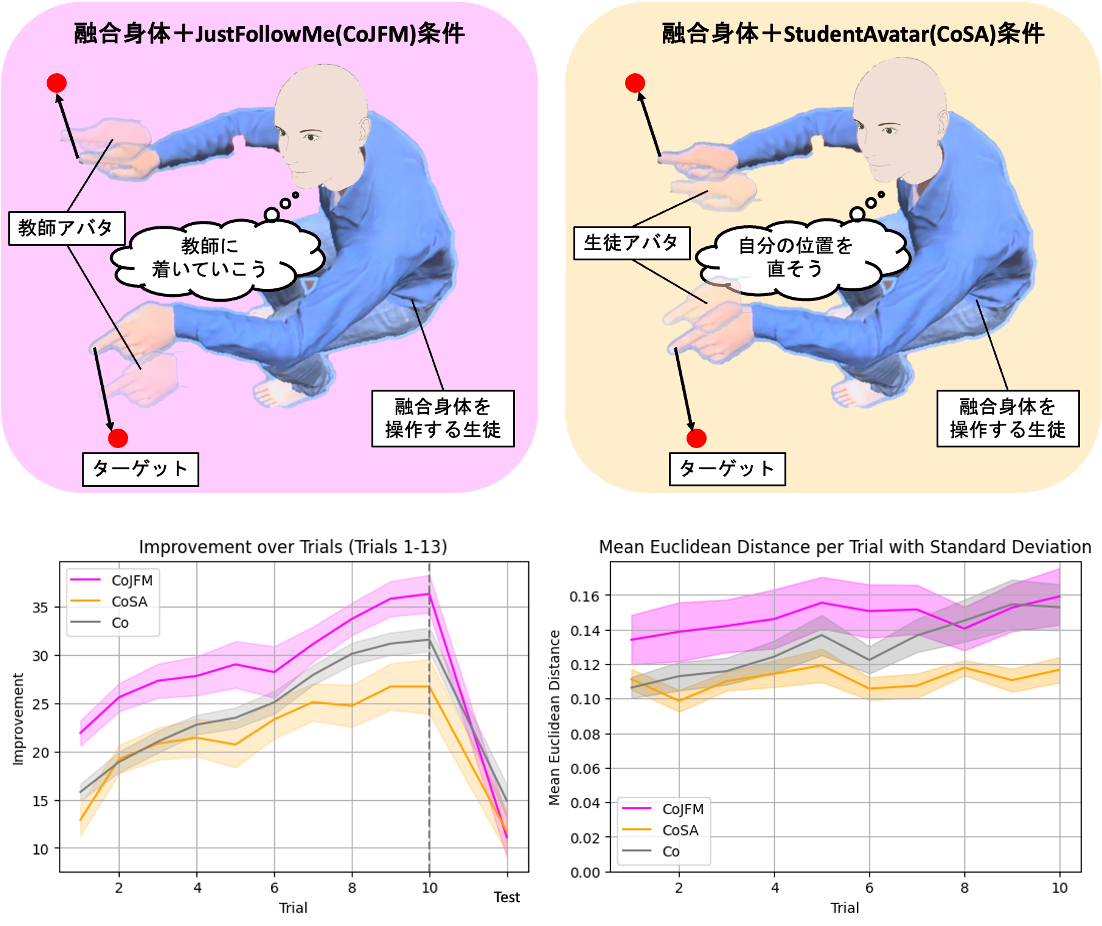
教師アバタの視覚フィードバックの付加が融合身体の運動学習に及ぼす影響
〇井上 大地(東京大学)、橋本 健(東京大学)、橋浦 健太(東京大学)、峯 大典(東京大学)、谷川 智洋(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学) - 加重平均型の融合身体は運動の学習を促すが、学習後に生徒が一人で融合時の動作を十分に再現できないという課題がある。原因として、融合中に教師の動作が先行することで生徒から離れ、生徒の動作が十分に教師と同期できないことが考えられる。本研究では既存の融合身体に教師アバタの動作の視覚フィードバックを付加し、融合中の生徒に教師の手を追従させることで、学習時の両者の動作の同期や学習効果への影響を調べた。
- 3D2-09
-
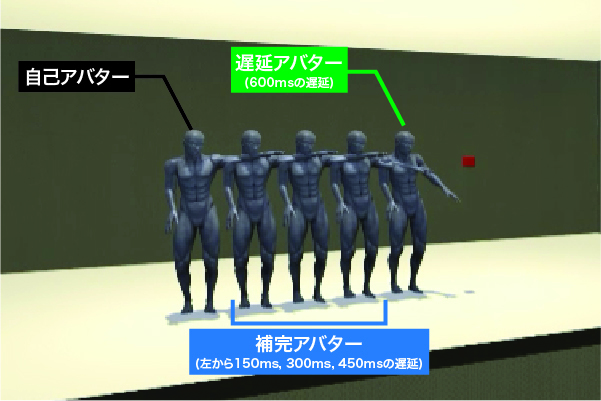
複数身体を介して遅延制御対象に運動主体感を生起させる手法
〇高田 一真(沖縄科学技術大学院大学)、近藤 亮太(東京大学)、杉本 麻樹(慶應義塾大学) - 自己の身体運動と制御対象の間に遅延が生じると,我々の運動主体感は減衰することが先行研究から明らかになっている.本研究では,遅延のある制御対象に運動主体感を生起させるために,自己身体と遅延の生じる制御対象の間に複数の異なる遅延を与えた身体を配置し,視覚的に運動を伝播させる手法を提案する.本手法を検証するために,バーチャルリアリティ環境下でのリーチング課題を実施し,運動主体感を測定する指標として主観的評定と意図的結合を用いた.結果,本研究の実験条件においては運動の伝播は必ずしも遅延のある制御対象に対する運動主体感を生起させるわけではないことが示唆された.
- 3D2-10
-
バーチャル分身所有感における課題特性の効果
〇成川 駆武人(豊橋技術科学大学)、HAPUARACHCHI HARIN(豊橋技術科学大学)、小野寺 琉(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - 身体運動に対して遅延時間の異なる複数のアバターを同時に操作するバーチャル分身を実装した。そして、遅延のあるアバターに機能性を与えることで遅延による身体性の低下を軽減できるという仮説(機能性仮説)を立て、実験による検証を行った。遅延のあるアバターでも、創造的運動を課し機能性を持たせることで、遅延の無い身体でしかできないリーチング課題に対して、身体所有感の低下を軽減できることが示された。

- 3D2-11
- 取り下げ
- 3D2-12
- 取り下げ