Sept. 14 2021
9月14日(火)
このプログラム速報版は7月30日更新版です。座長は掲載していません。
一般発表 9:00-10:20 感覚・知覚(視覚)
- 3B1-1
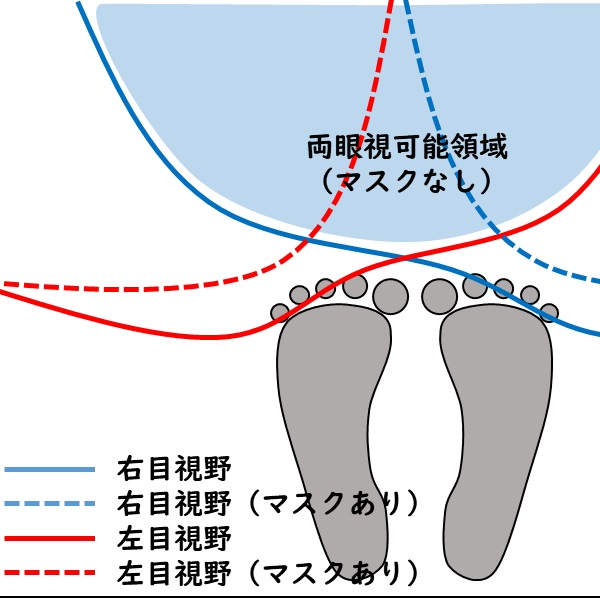
- マスク装着時の地面視野領域の変化
〇徳永 翼(電気通信大学)、梶本 裕之(電気通信大学) - 近年、ほとんどの人が外出時にマスクを着用している。マスク着用による変化の一つに地面の見え方の変化があげられる。両眼視可能領域が狭まることで地面をうまく認識できなくなると転倒の危険性が増すと考えられる。本研究ではどの程度視野が狭まるのかを調べるため、正面を向いたときの周辺視野による地面視野領域を測定した。結果、マスク着用時は非着用時と比較して20㎝程度地面の視野領域が前方に狭まることが確認できた。
- 3B1-2
- 車載用ヘッドアップディスプレイの設計パラメータとヒトの視覚情報処理負荷の関係
〇山田 和佳(東京大学)、上田 一貴(東京大学)、髙田 真也(東京大学)、中尾 政之(東京大学) - 車載用ヘッドアップディスプレイを自動車の運転中に安全に使用するためには,短い時間で映像から情報を受容できるよう,運転者の視覚情報処理を考慮した設計を行う必要がある。装置の設計パラメータである映像投影方法と,提示する映像の情報量を変化させ,視覚情報処理にかかる時間を眼球運動と脳波の計測により評価した。

- 3B1-3
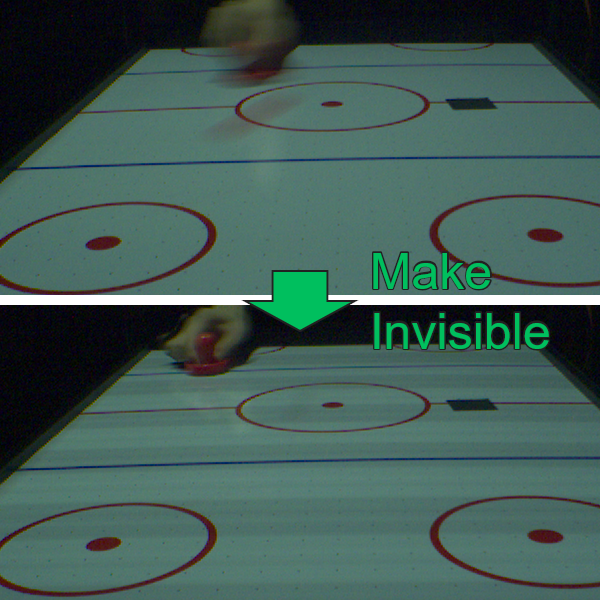
- 追跡型構造化光による運動物体の不可視化の検証
〇佐藤 健吾(東京工業大学)、渡辺 義浩(東京工業大学) - 人間の視覚の時間分解能を超える速度の高速プロジェクタと,高速カメラを用いたトラッキングにより,未知の運動をする物体に遅れなく追従する投影が可能である.本稿では,対象に光が当たらない状態を維持する投影によって,物体の色や位置に対する不可視化を検証する.同時に,この際発生する背景の変化を補正する投影を,視覚的持続が保たれている間に行うことによって,同変化に対する不可視化を検証する.
- 3B1-4
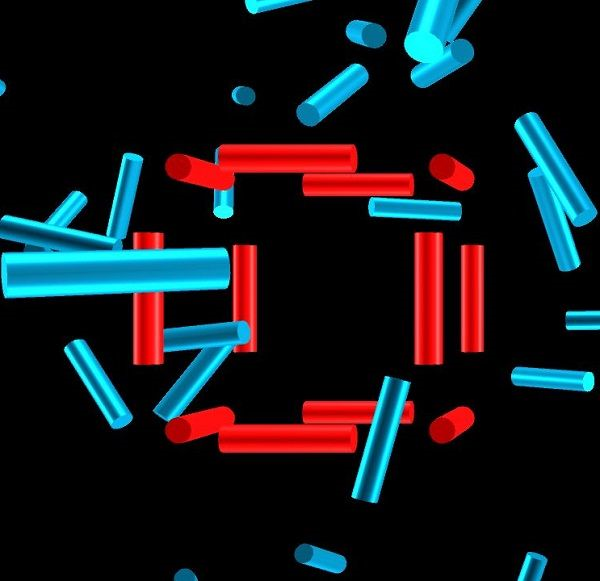
- 3次元形状認識における輪郭線統合
〇和崎 夏子(日本女子大学、日本学術振興会特別研究員)、竹内 龍人(日本女子大学) - 3次元空間における形状認識の機構を明らかにするために、多数の円柱がランダムに配置された妨害刺激の中から、円柱で構成した立方体を検出する課題をVR空間上で行った。その結果、円柱が平行であり端点が接しない形状の方が、端点が接続する場合よりも検出しやすいことがわかった。この結果は、2次元平面上の場合(Hessら、2003)とは異なり、3次元空間では、同一方位の要素の統合により形状認識がなされていることを示唆している。
- 3B1-5
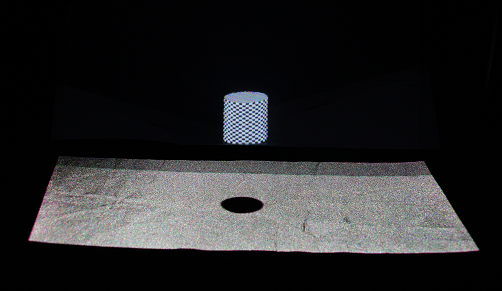
- 影プロジェクションによる空中像の立体感錯視
〇矢野 裕太郎(電気通信大学)、星 彩水(電気通信大学)、小泉 直也(電気通信大学) - 物体の位置や形状の知覚において影は重要な要素であり,影は物体の位置や形状の知覚に効果を与えることが知られている.本研究では現実空間に映像が表示されている空中像に形状の異なる影を投影することにより,影が空中像の形状の知覚にどのような効果を与えるかを調査した.その結果,影の形状によって空中像の形状の知覚が変化することがわかった.
- 3B1-6
- ビデオシースルーと光学シースルーを用いた複合型HMDの基礎検討
〇今村 達哉(大阪工業大学)、中泉 文孝(大阪工業大学)、大須賀 美恵子(大阪工業大学) - 既存のARに用いられるHMDには2つの課題が存在する.中心視野には輻輳とその調節に矛盾があるため焦点が合わないという課題と,CGの提示範囲が人間の視野に比べて狭いという課題である.そこで本研究では中心視野にビデオシースルー型を用いることで輻輳と調節の矛盾の問題を解決しつつ,周辺視野に光学シースルーを用いることでCGの提示範囲の拡大を行う.本発表では,この手法の実現に向けて基礎的検討を行った結果を報告する.

一般発表 9:00-10:20 コミュニケーション1
- 3C1-1
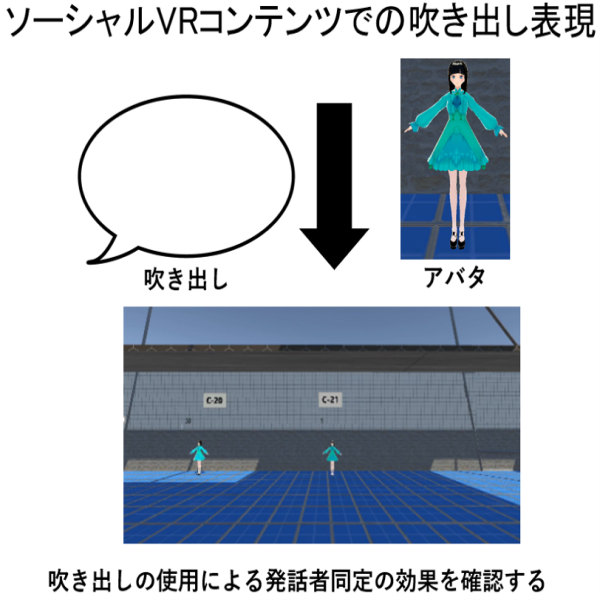
- ソーシャルVRコンテンツにおけるアバタへの吹き出し表現の付与による発話者同定手法の提案
〇楊 光(立命館大学)、松村 耕平(立命館大学)、野間 春生(立命館大学)、大井 翔(大阪工業大学) - ソーシャルVRコンテンツでは、VR空間においてアバタを媒介として音声によるユーザ同士のコミュニケーションが可能である。このコンテンツにおける問題点として、発話中のユーザを特定することが難しいことや、どのユーザがなんの会話をしているのかの同定が難しいことがある。本研究では、発話中のアバタに吹き出しを付与することでこれらの問題を解決することを目指す。
- 3C1-2
- 非言語情報を用いたアバターの親近感を高める手法に関する研究
〇船木 烈(東北学院大学大学院)、物部 寛太郎(東北学院大学) - 現在,新型コロナウイルスの感染拡大を防ぐために,Zoomなどのオンラインツールを用いた遠隔授業やテレワークが行われている.そこでは,自分の顔の代わりに,アバターを映して参加することがある.アバターの親近感を高めるためには,うなずきやまばたきなどの非言語情報が重要となる.そこで本研究では,Unityを用いて非言語情報をアバターに実装することで,オンラインでの円滑なコミュニケーションに必要な親近感の向上を目指した.

- 3C1-3
- CGエージェントを利用したビデオ会議の退出支援
〇西田 知生(東京大学)、Foong Eureka(東京大学)、山下 直美(NTTコミュニケーション科学基礎研究所)、葛岡 英明(東京大学)、Jamieson Jack(NTTコミュニケーション科学基礎研究所) - ビデオ会議では、次の予定のために会議を退出する必要がある場合でも議論の流れを妨げずに退出することが難しく、必要以上に会議により長く残ってしまうという問題がある。本研究ではCGエージェントの介入によって会議からの退出を支援する事を提案する。エージェントの介入方法として、参加者全員が介入を観察可能か否かという要因と、エージェントが退出者の最後の発言を促すか否かの要因について比較する実験を行った。

- 3C1-4
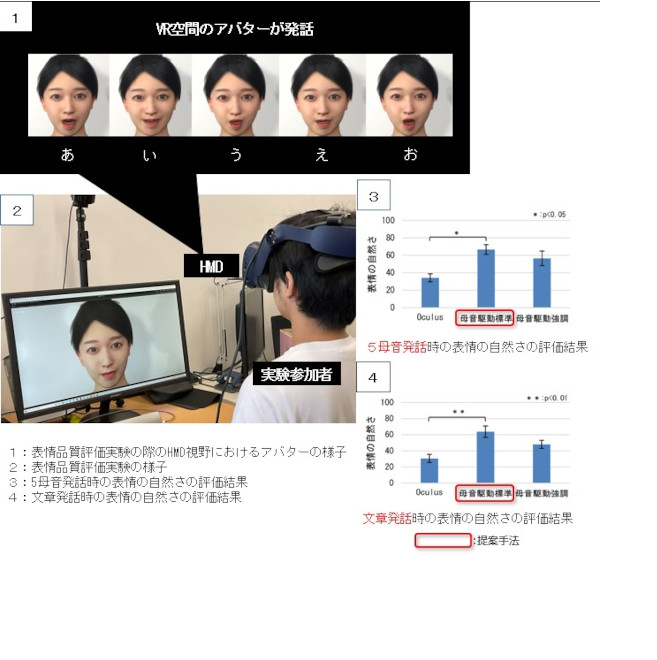
- VRアバターの表情生成手法に関する研究
〇加藤 綾斗(東京都立大学)、菊地 勇輔(東京都立大学)、YEM VIBOL(東京都立大学)、池井 寧(東京大学) - 対話を含む活動をVR空間で行う場合には,対話者を表わすアバターが有用である.本研究では,フォトグラメトリで構築した頭部モデルを有するアバターが,日本語の発話を行う際に自然な表情を与える手法を開発している.本論文では,テキストから発話・表情変化を与えるシステムの構成と予備実験の結果について述べる.
- 3C1-5
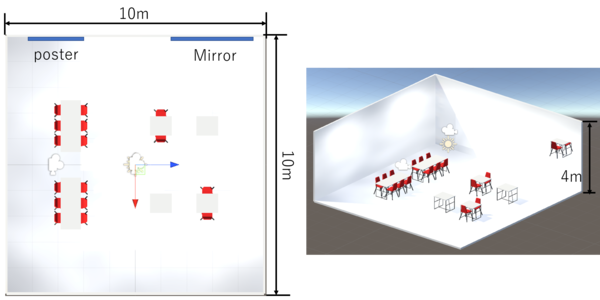
- VR環境でのコミュニケーションにおける鏡の効果
〇亀岡 嵩幸(電気通信大学 大学院)、金子 征太郎(電気通信大学 大学院) - VRSNSにおいてユーザーが鑑の前に集まる現象が知られている。VR空間上の鑑はアバターに対する自己身体性を生起させることが知られているが、我々は鑑の存在が他者へのプレゼンスを向上させ、ひいてはコミュニケーションの円滑化に繋がるのではないかと考えた。本発表ではVR空間における鑑の存在がユーザーにどのような行動を誘発するのか実験的に調査した結果を報告する。
- 3C1-6
- ツンデレインタラクション〜行動変容を目的とした計測振舞データを用いたツンデレARエージェントの評価〜
〇田井中 渓志(奈良先端科学技術大学院大学)、児玉 哲哉(奈良先端科学技術大学院大学)、川瀬 寛也(奈良先端科学技術大学院大学)、澤邊 太志(奈良先端科学技術大学院大学)、神原 誠之(奈良先端科学技術大学院大学) - 行動変容を促すことを目的として,これまでオペラント条件付けに基づき利用者が好意を持つエージェントによる冷たい振る舞いと優しい振る舞いを組み合わせたツンデレインタラクションを提案してきた.本稿では,実際に商業利用している人によるツンデレの振る舞いデータを計測し,それに基づくツンデレARエージェントによるインタラクションシステムを構築する.実験では本提案手法による作業の継続意欲に対する効果検証を行う.

- 3C1-7
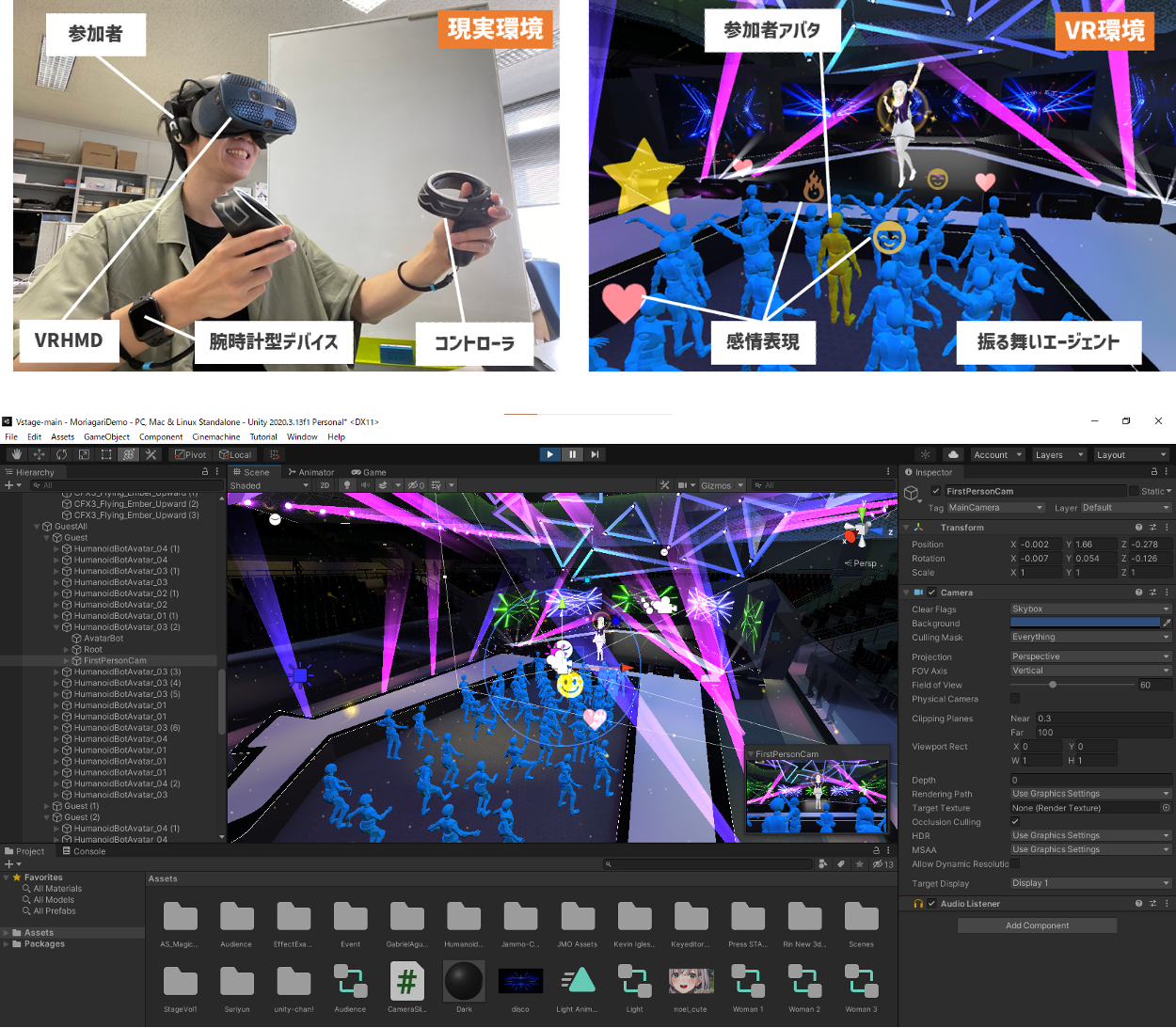
- Hype Live:生体情報によるエージェント振る舞いと 感情表現を用いた一体感向上VRライブシステム
〇阿部 将士(奈良先端科学技術大学院大学)、秋吉 拓斗(奈良先端科学技術大学院大学)、Butaslac Isidro(奈良先端科学技術大学院大学)、Zhou Hangyu(奈良先端科学技術大学院大学)、澤邊 太志(奈良先端科学技術大学院大学)、藤本 雄一郎(奈良先端科学技術大学院大学) - VR ライブにおいて参加者同士の反応の共有は困難であるが一体感を向上させる要素の一つであ る.しかし参加者の感情表現に着目した一体感の向上に関する研究は未だ多くない.そこで,本研究で は VR ライブ参加者の脈拍情報をもとに推定された感情に基づくエージェントの振る舞い動作と,感情 を表す絵文字や記号をエージェントの頭上に表示させることで一体感を向上させるシステムである Hype Live を提案する.
一般発表 9:00-10:20 アバタと身体性
- 3D1-1
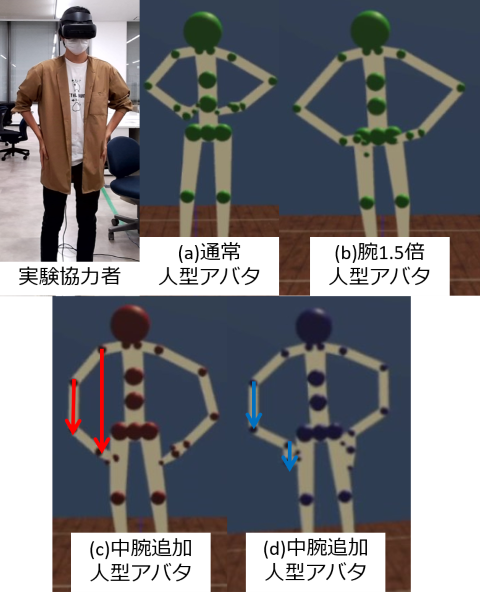
- 第二の肘関節を追加した人型アバタへの身体所有感生起に関する研究
〇本多 誼海(大阪工業大学大学院)、中泉 文孝(大阪工業大学)、大須賀 美恵子(大阪工業大学) - 身体所有感とは,視覚や自己受容感覚などの感覚情報を統合して,ある身体を「自分の身体」だと知覚する感覚である.VR空間のアバタに対しては,使用者とアバタの身体運動を同期させ,あたかも自分の身体のように動作させることで身体所有感を生じさせる手法がある.本研究では,アバタの骨格が人と異なる場合において,身体所有感にはどのような影響があるのかについて,第二の肘関節を追加した人型アバタを用いて検証を行う.
- 3D1-2
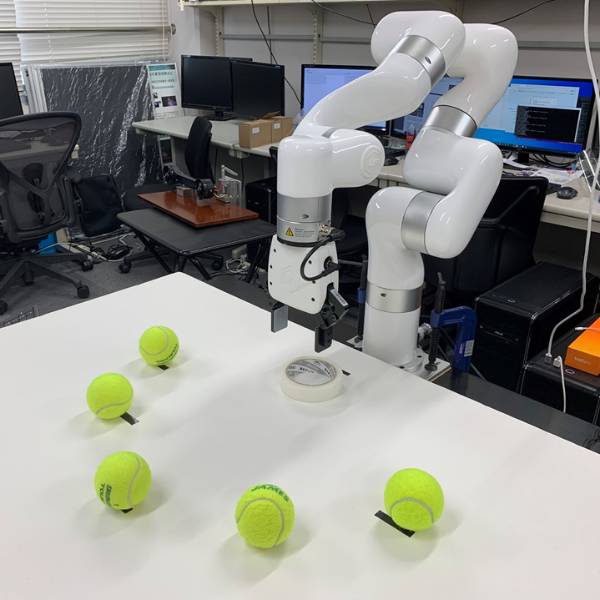
- プログラムと人間の運動の融合・タスクの自動化による運動主体感, 身体所有感の変容
〇武智 通(慶應義塾大学)、中村 文彦(慶應義塾大学)、福岡 正彬(慶應義塾大学)、Ganesh Gowrishankar(LIRMM - Laboratoire d'Informatique de Robotique et de Microélectronique de Montpellier)、家永 直人(慶應義塾大学)、杉本 麻樹(慶應義塾大学) - 運動主体感とは, まさに自分が運動を引き起こしているという感覚であり, 身体所有感とは, その身体, またはその身体の一部は自己に帰属するという感覚である. 本研究では, ロボットアームを用いてピックアンドプレイスタスクを行う際に, プログラムにより制御するロボットの運動と人間の運動を融合, また, タスクを自動化する条件で運動主体感, 身体所有感がどのように変化するかを調査した.
- 3D1-3
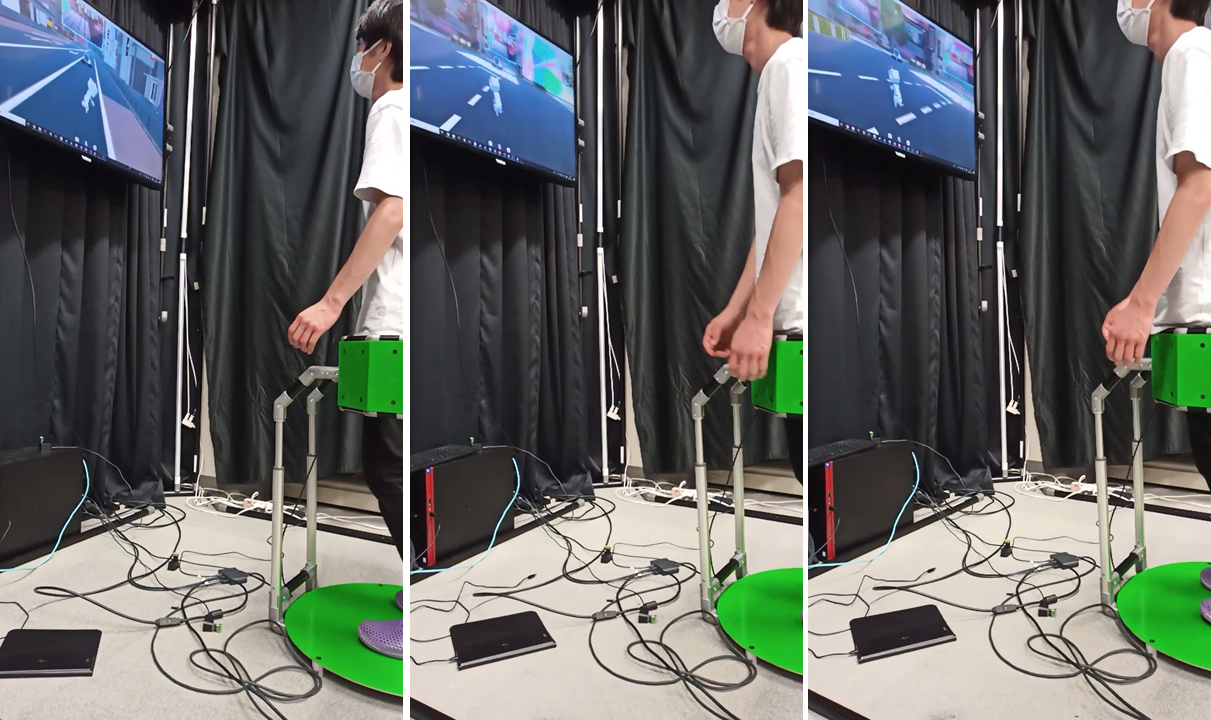
- 簡易没入型VR歩行システムによるVRSNSへの入力機器エミュレーション
〇木戸 功了(広島市立大学)、脇田 航(広島市立大学) - VRChatやCluster等のVRSNSではフルボディトラッキングによってVR空間内を自身の足で歩き回ることができるが,歩行可能な空間の確保の問題やVR酔いの問題がある一方,VR空間内を歩行するための装置についてもコストや安全性等の問題がある.そこで本研究では,ユーザの進行方向に大腿部を支持し,推定した歩行動作に応じて映像呈示することで歩行感覚を錯覚可能な簡易没入型VR歩行システムを用いて既存のVRSNSへの入力機器エミュレーションを行う.
- 3D1-4
- VRChat内実験室における不可能身体所有感の研究
〇石本 浩気(豊橋技術科学大学)、杉本 麻樹(慶應義塾大学)、稲見 昌彦(東京大学)、北崎 充晃(豊橋技術科学大学) - VRChat内に実験環境を構築し,不可能な関節運動を行うアバタ身体に,自己運動と連動することで身体性が獲得されるかを調べた。被験者の頭部及び両手の動きを計測し,IKを用いてリアルタイムに連動(同期,非同期)するアバタと関節が逆に曲がるアバタを体験させた。その結果,不可能身体アバタであっても,同期の場合に非同期よりも高い身体所有感と行為主体感が得られ,不可能身体が獲得可能であることが示唆された。

- 3D1-5
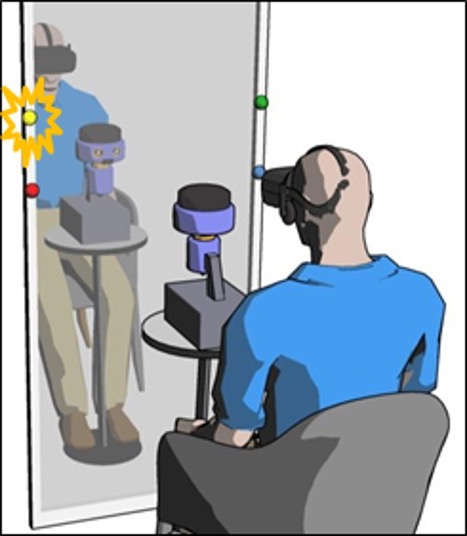
- アバターと自己身体の視点シフトによる身体感覚の変化
〇中川 航太朗(豊橋技術科学大学)、井上 康之(豊橋技術科学大学)、杉本 麻樹(慶應義塾大学)、稲見 昌彦(東京大学)、北崎 充晃(豊橋技術科学大学) - 仮想空間におけるVRアバターや実世界にあるアバターロボットの1人称視点(1PP)映像を用いた没入VR体験は,自己位置の変化と自己意識の変化を引き起こす.また,体験者と同じ姿勢や動きのアバターを鏡により3人称的な視点から見ることで,アバターを1人称視点で観察する場合と同じように全身所有錯覚が起きる.本研究では,視野中心を目の位置から変更することによる,鏡に映る身体への自己身体感覚の変化を調べた.
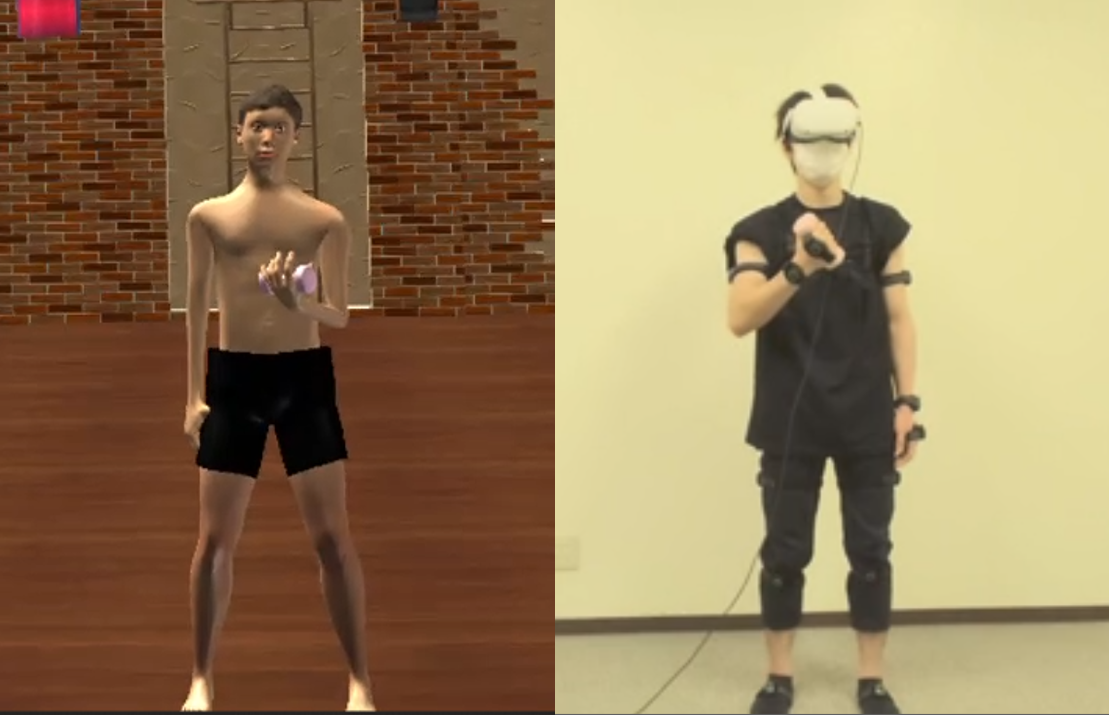
- 3D1-6
- VRツイスターにおける自身のアバタの外見が相手とのインタラクションに及ぼす影響
〇後藤 拓海(電気通信大学)、櫻井 翔(電気通信大学)、野嶋 琢也(電気通信大学)、広田 光一(電気通信大学) - VR空間内において全身運動を伴うインタラクションを行うゲームでは、アバタの外見が身体図式に影響し、さらに相手がいる場合、互いの外見は互いの印象形成や行動にも作用すると考えられる。本研究では、全身運動を伴い至近距離で相手と対戦するツイスターゲームに着目し、VR環境でアバタを用いて2人で対戦できるシステムを構築、自己アバタの外見の変化によりゲームプレイや対人心理などに与える影響について検証した。

- 3D1-7
- ユーザの筋運動に随伴して変化するアバタの視覚的な筋肉量が身体性に与える影響の基礎調査
〇木村 信人(電気通信大学)、櫻井 翔(電気通信大学)、野嶋 琢也(電気通信大学)、広田 光一(電気通信大学) - VR空間でユーザの代替身体となるアバタは様々な外見(容姿,体格,人体比率等)の獲得を可能にする.この時,ユーザと全く異なる外見のアバタにも身体所有感や運動主体感が生じることがわかっている.しかし,ユーザの運動に対応してアバタの外見が変化していく場合の影響は未解明である.本稿では,筋肉量を例題に,ユーザの運動に伴ってアバタの外見が変化する時,身体所有感や運動主体感への影響と生起条件を調査した.
研究委員会OS 9:00-10:20 グローバルな触覚研究者像を探る
- 3E1
- グローバルな触覚研究者像を探る
〇蜂須 拓(筑波大学)、川添 杏 (カリフォルニア大学)、Salazar Jose(東北大学)、北田 亮(神戸大学) - 技術開発や研究活動が加速する現在,多くの分野において横断的な研究開発,グローバル化が求められており,研究者自身も自身の姿勢を見直す必要がある.そこで本オーガナイズドセッションでは,研究者として海外で働いた経験のある方,現在海外で研究活動している方,逆に海外から日本にいらして研究されている方の研究や体験談から,グローバルな研究者像を探る.

研究委員会OS 13:00-14:20 災禍体験の伝承とVR
- 3A2
- 災禍体験の伝承とVR
〇雨宮 智浩(東京大学)、大田 真一郎(株式会社フジタ)、石川 大樹(株式会社理経)、廣瀬 通孝(東京大学)、岡本 真希(株式会社キャドセンター)、松本 学(株式会社キャドセンター) - 災害や戦争の過酷さを伝えるだけでなく,そうした状況をインタラクティブに体験するとこで,体感的な理解だけでなく,普段の生活においても視点や行動の変化が起こることが期待される.そのようなインタラクティブな体験の作り方や成立させる条件について,複数のコンテンツの実例をふまえながら議論していく.
一般発表 13:00-14:20 感覚・知覚(時間)
- 3B2-1
- 暗闇シーン挿入によるVR酔い軽減方法の研究
〇小川 直輝(松江工業高等専門学校)、橋本 剛(松江工業高等専門学校) - 近年,VRコンテンツの増加にともない,VRが身近なものとなってきている.その一方で「VR酔い」はVRコンテンツの利用を阻む原因となっており,様々な対策が講じられている.本研究では対策の選択肢を増やすことを目的に,暗闇シーン挿入による酔い軽減方法を提案し,検討する.実験により,暗い時間が長いほどVR酔い軽減効果が高くなることに加え,明るさの切り替え間隔によって効果が増減する可能性が示唆された.

- 3B2-2
- VRヘッドマウントディスプレイによる視覚刺激呈示の正確性と精度
〇立花 良(東北大学)、松宮 一道(東北大学) - VR HMDの普及によってVR環境における知覚認知の心理学研究が増加する一方、HMDに視覚刺激を呈示する際の呈示時間の正確性や呈示遅延の安定性は明らかでない。本研究では、HTCやOculusなど近年主流のHMDを使用し、フレーム単位で視覚刺激呈示する際の正確性と精度を網羅的に検討した。実験1ではBlack-to-White Test、実験2ではGray-to-Gray Test、実験3でVR Scene Testを実施し、呈示時間の正確性はHMDによって異なる一方で、呈示遅延は共通して約20ミリ秒生じると解明した。
- 3B2-3
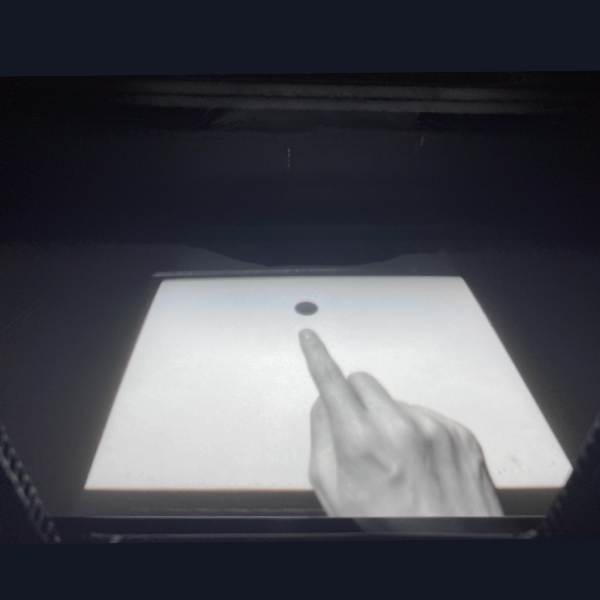
- 身体感覚と視覚情報にずれが生じる低遅延没入環境における映像遅延とターゲットの加速度がユーザへ与える影響
〇栃岡 陽麻里(東京大学)、早川 智彦(東京大学)、石川 正俊(東京大学) - 100 ms 以下の低遅延没入環境であっても,映像遅延がタスクパフォーマンスを低下させると示した先行研究に加え,本研究では1000 fps でユーザの手を任意の映像遅延を伴って投影する実験装置を用い,遅延環境下においてターゲットの加速度がユーザに与える影響を調査した.指定した加速度に応じ移動するターゲットをユーザがタップするまでの所要時間を計測し,ターゲットの加速度が大きいとタスクパフォーマンスが低下することを明らかにした.
- 3B2-4
- VR空間における時間圧縮の伸長
〇金城 大輝(琉球大学工学部)、山田 孝治(琉球大学工学部) - VR空間でコンテンツを体験した際に時間圧縮効果が発生することは通説として知られていたが、GraysonMullenらによって実証がなされた。本研究はそのVR空間における時間圧縮を、視界情報によって変化させることができるかを実験・評価する。
- 3B2-5
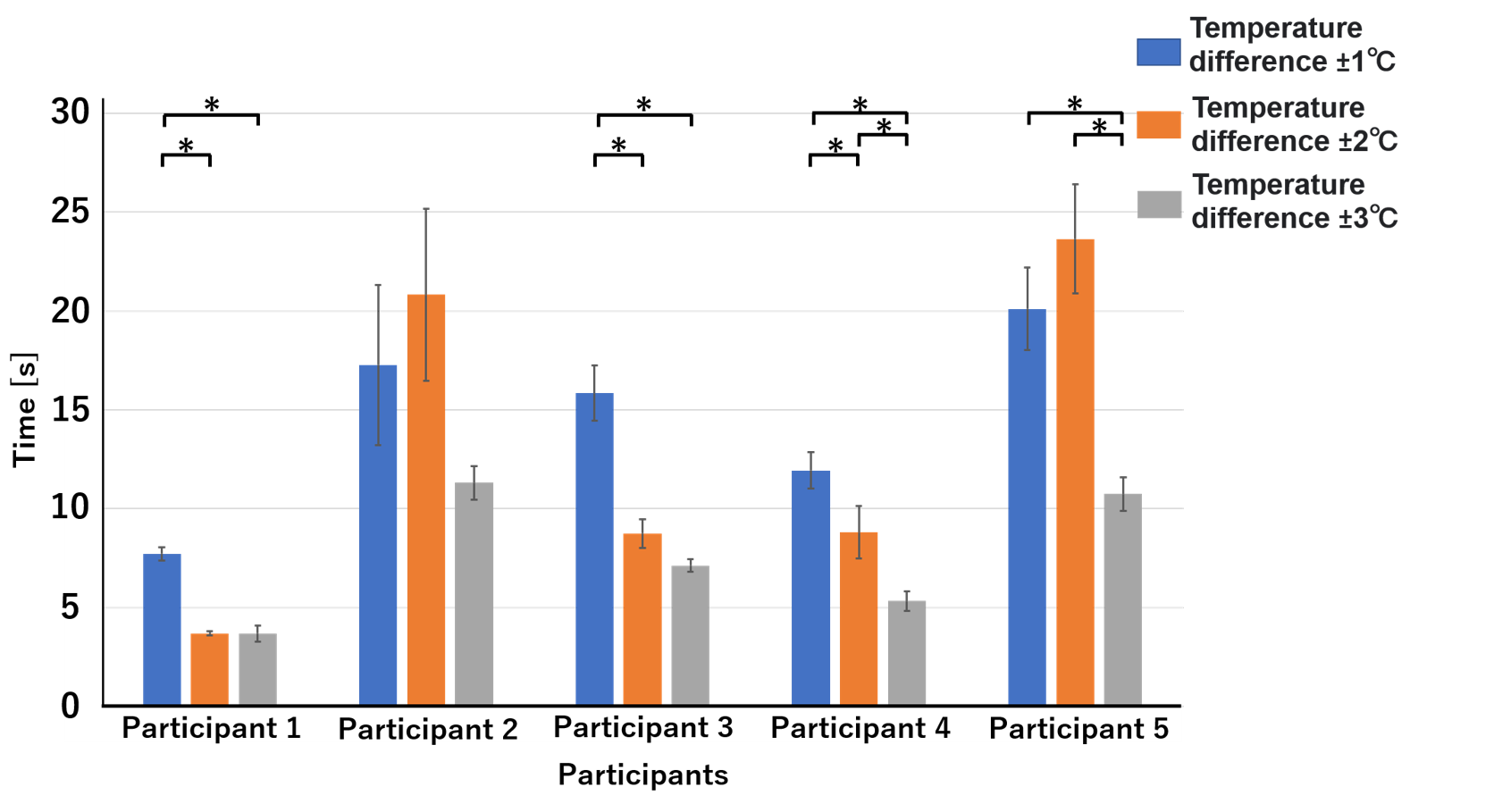
- 無関帯での予冷予熱温度の差によるThermal grill illusion発生時間の変化
〇木本 涼太郎(熊本大学院)、嵯峨 智(熊本大学院) - 我々の以前の研究では予熱予冷を行いThermal grill illusionを行うと痛みを知覚するまでの時間が短縮されることがわかった。そこで人が温覚冷覚共に順応する無関帯と言われる温度帯である30℃から36℃の間で予熱予冷の温度の差を±1℃、±2℃、±3℃と大きくして行った場合の痛みを知覚するまでの時間変化を定量的に評価する。
- 3B2-6
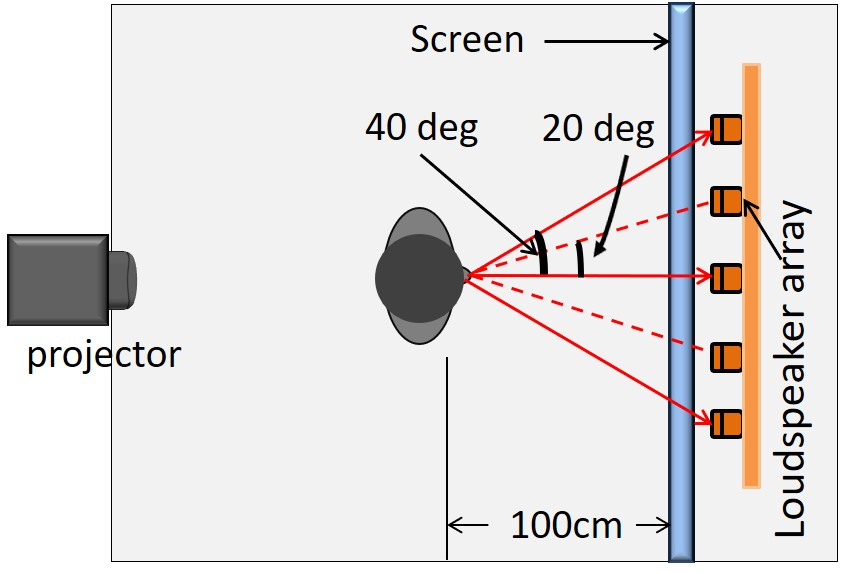
- 音刺激の諸特性がベクション知覚時の音像定位に及ぼす影響
〇山高 正烈(愛知工科大学)、坂本 修一(東北大学)、寺本 渉(熊本大学) - 音像定位を行うためには,自己と音源との相対位置関係に加えて,自分自身の位置情報が重要である.本研究では,視覚刺激により誘導されるベクション知覚時に,提示する音刺激の諸特性が音像定位にどのような影響を及ぼすかについて調べた.実験結果,音刺激の長さが増加するにつれ音像定位の精度が向上した.音の種類をパラメータに検討した結果,動的意味を含む音の場合は音像定位が自己運動の方向にシフトされることが分かった.
一般発表 13:00-14:20 コミュニケーション2
- 3C2-1
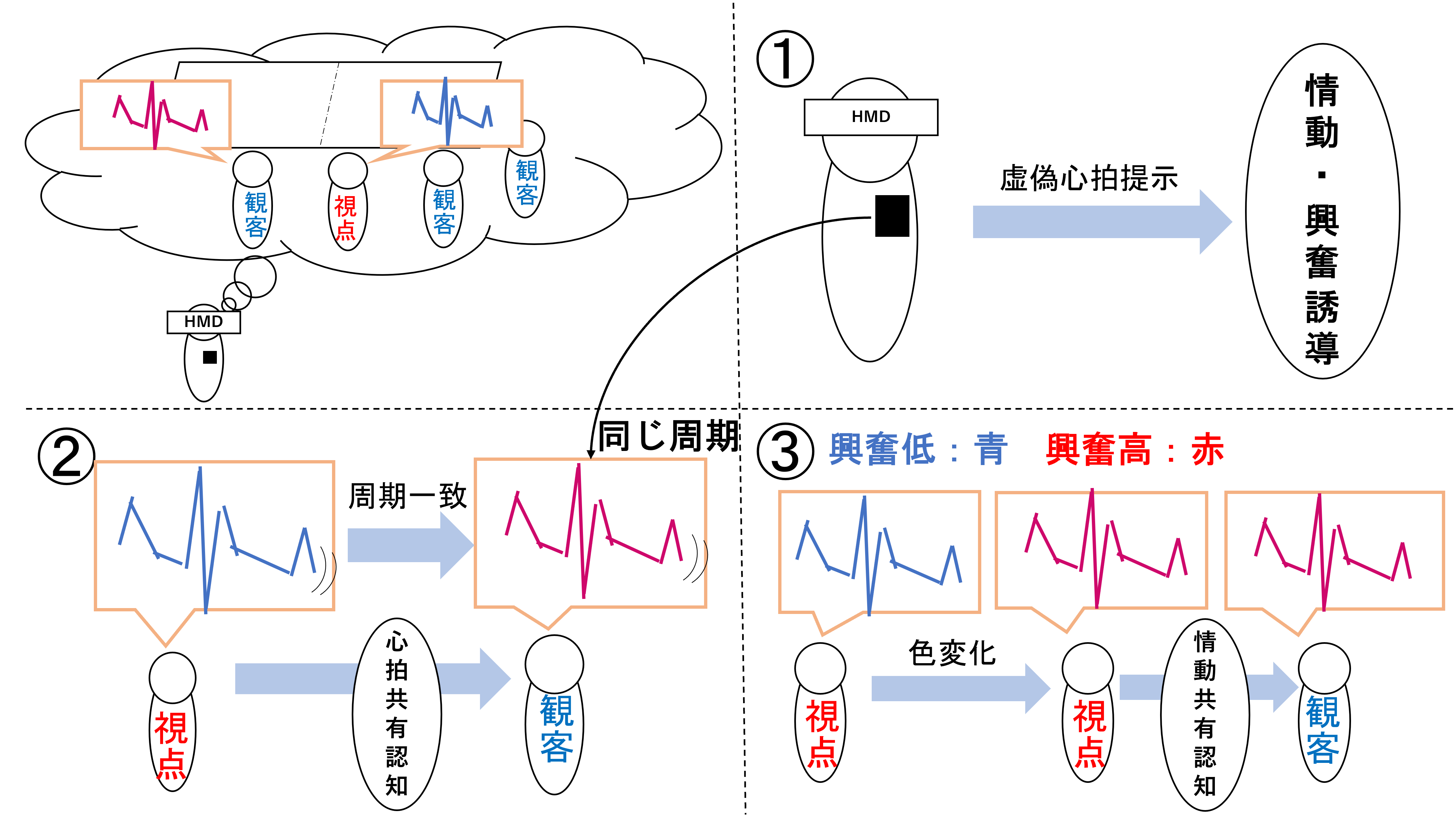
- 遠隔地のスポーツ観戦者同士の一体感醸成手法に関する提案
〇樫村 侑樹(電気通信大学大学院)、櫻井 翔(電気通信大学大学院)、広田 光一(電気通信大学大学院)、野嶋 琢也(電気通信大学大学院) - 遠隔地でのスポーツ観戦は現地観戦よりも観客同士の一体感の体験が難しいという課題が存在している.そこで,遠隔観戦における観客同士の一体感の醸成を促進するため,本研究では引き込み現象に着目をし,遠隔観戦者に現地観戦者と等価な状況を実現可能な手法の実現を目指す.具体的には,心拍提示を通じて自身の情動状態を客観的に捉える状態とし,自身が他者と同じ情動状態にあると認知させることで一体感の醸成を狙う.
- 3C2-2
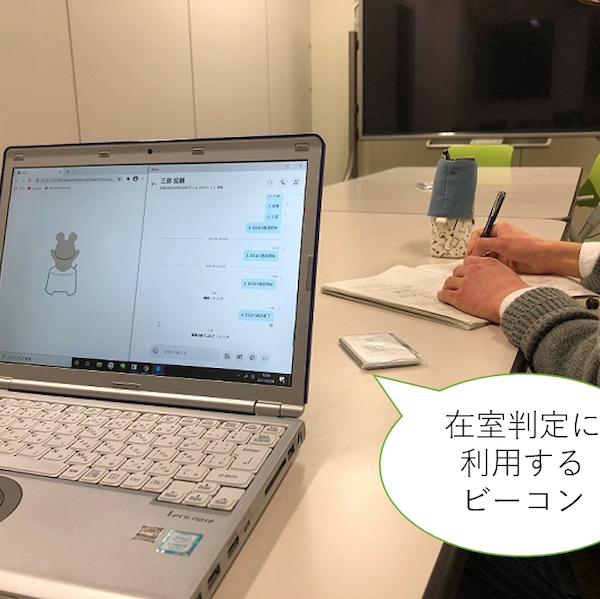
- 施設入所高齢者の環境変化によるストレス軽減を目指すバーチャルリビングシステムの提案
〇瓜生 賢輝(名古屋工業大学)、舟橋 健司(名古屋工業大学) - 高齢者は施設に入ることで家族と離れて暮らすことがあり、環境変化のストレスによりせん妄になることがある。本研究ではそのような高齢者のストレスを軽減するために「バーチャルリビングシステム」を提案する。このシステムはビデオ通話機能を持つソフトとiBeaconを用いて、離れた場所で暮らす高齢者とその家族とを適度な関係でつなぐ。実際にシステムを作成し、実験で効果を確認する。
- 3C2-3
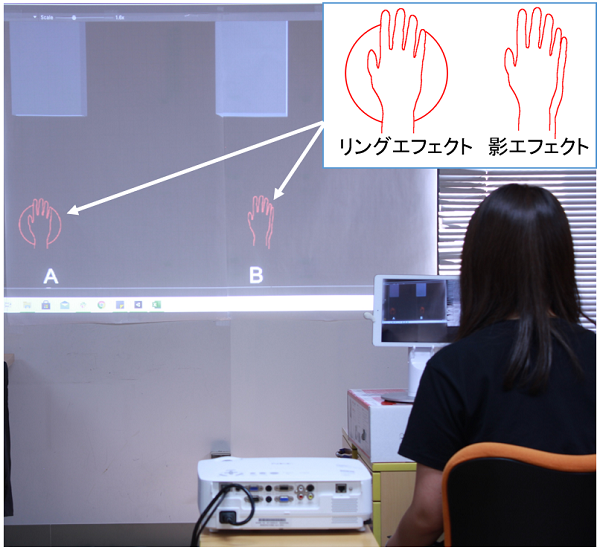
- レーザ走査プロジェクタにおける拡張手の浮遊および接触表現
〇渡邊 あきら(大阪大学)、内田 琢也(大阪大学)、佐藤 優志(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - ウィズコロナ時代における様々な非接触コミュニケーションが求められている中,本研究では,ビデオ通話システムと投影拡張手を組み合わせる手法を提案し,簡便にも存在感ある遠隔コミュニケーションの実現を目指す.拡張手の投影には持ち運びが容易で明室でも高輝度投影可能な走査型のレーザプロジェクタを想定する.そのため,浮遊状態と接触状態を表現した輪郭投影拡張手を使用した際のユーザ心理を調査する.
- 3C2-4
- 在宅勤務における気分の切り替えを支援するバーチャル休憩空間の提案
〇塩崎 敬祐(東京大学)、浅川 香(三菱電機株式会社)、大澤 想(三菱電機株式会社)、葛岡 英明(東京大学)、鳴海 拓志(東京大学)、和田 有史(立命館大学) - COVID-19の影響により在宅勤務時間が増えたが,リアルなコミュニケーションが制限されたことにより,気分の切り替えが困難になったと考えられる.そこで,本研究では,気分の切り替えのタイミングとしておやつ休憩に着目し,おやつ休憩を他者と共有するためのバーチャル休憩空間を利用することによって気軽なコミュニケーションの誘発や気分の切り替えを促す手法の提案と,その有効性の検証を行う.

- 3C2-5
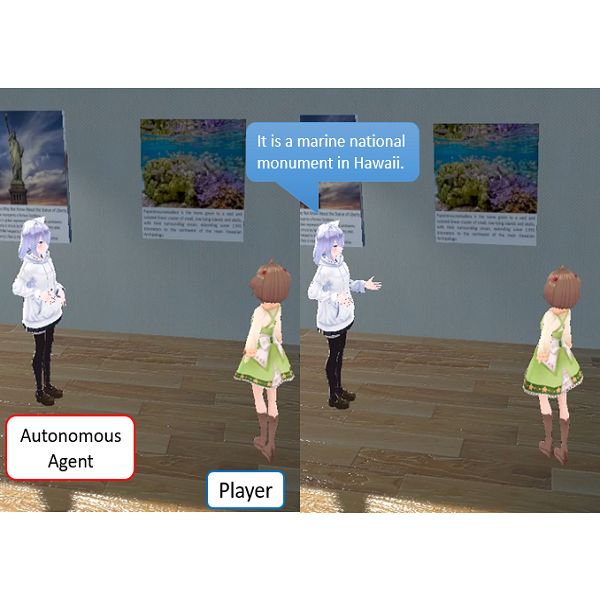
- A Model for Virtual Guiding Agent based on People’s Visual Attention Estimation for Actively Open Interactions
〇陳 品蓉(東京工業大学)、三武 裕玄(東京工業大学)、長谷川 晶一(東京工業大学) - The research proposes a model to make autonomous agents more active in guiding using eye-tracking device to collect detailed gaze information of the player to estimate attention amount and find timing and target to explain.
- 3C2-6
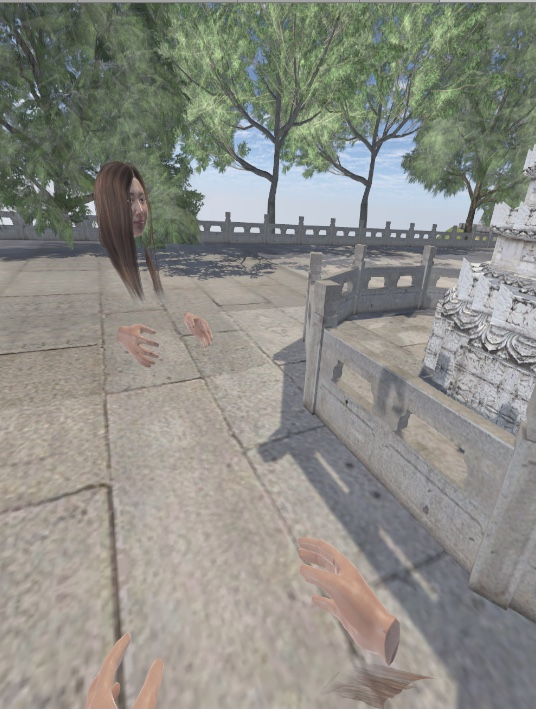
- Shared Virtual Reality Tourism System with Emotional Connections
〇王 思媛(慶應義塾大学)、小木 哲朗(慶應義塾大学) - This study describes a new shared VR tourism system, which allows multiple users to immerse themselves in the travel experience together and interact through non-verbal communication realized by eye-tracking and lip tracking technology to build emotional connection effectively.
- 3C2-7
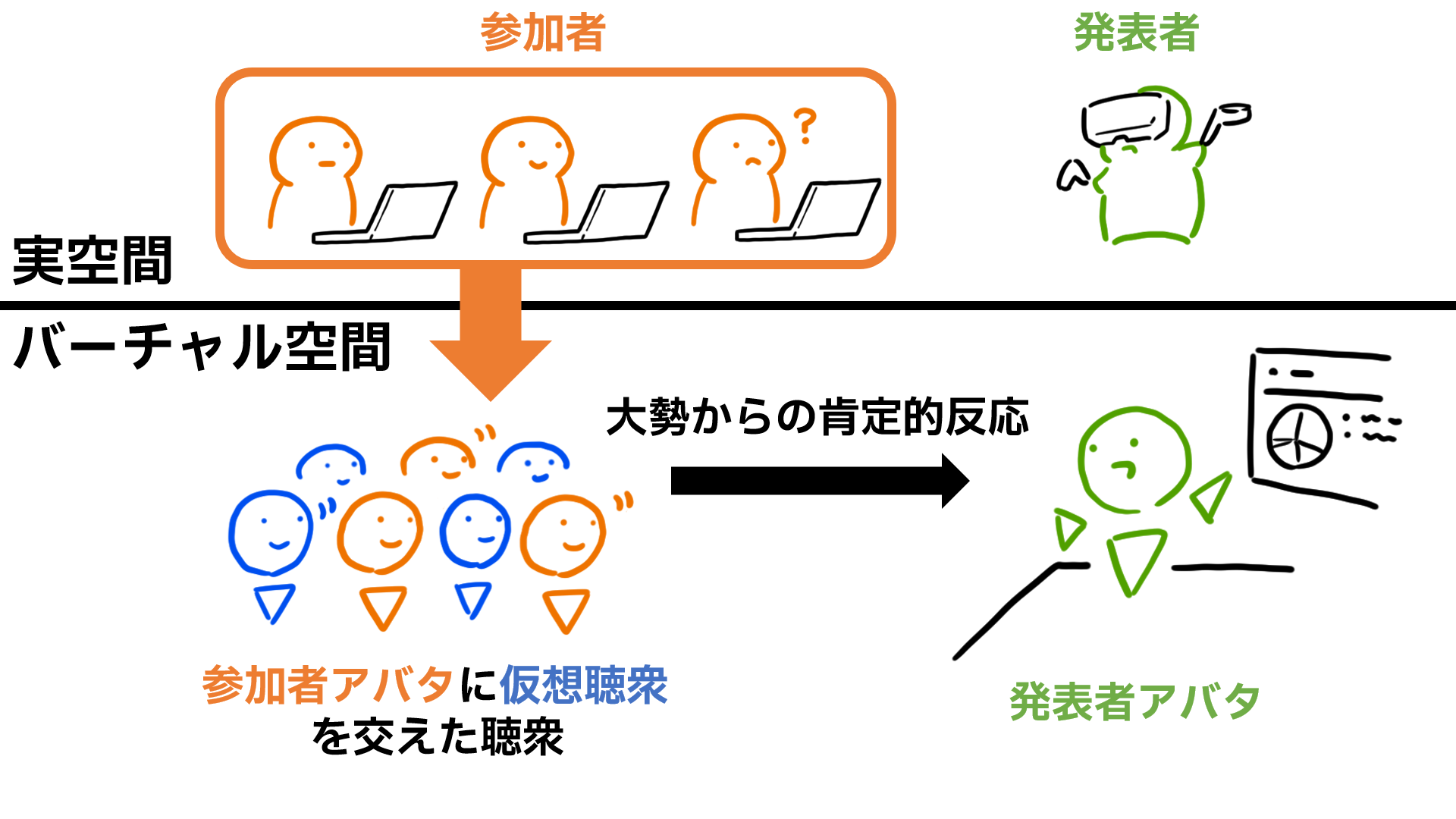
- バーチャル環境における発表者の被視聴感増幅による発表者支援
〇谷口 智生(大阪工業大学大学院 ロボティクス&デザイン工学研究科)、中泉 文孝(大阪工業大学 ロボティクス&デザイン工学部) - 既存のバーチャル環境を用いた発表は聴衆の身体動作や表情といった反応の多くが反映されず、発表者は自身の発表への手ごたえを感じることが難しい。また、これらの反応の意図を正確に汲み取り参加者アバタに反映することもまた困難である。そこで本研究では、聴衆の身体動作や見かけの人数をユーザ側ではなくシステム側で変化させ、発表者の被視聴感や聴かれている感覚を増幅させて心理的支援を行う手法を提案する。
一般発表 13:00-14:20 テレプレゼンス・融合身体
- 3D2-1
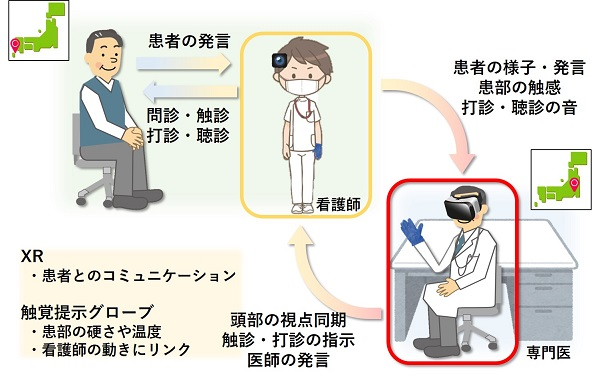
- 遠隔触診システムの研究 (第1報) ~遠隔診療の調査と医師ヒアリングまとめ~
〇神島 海音(早稲田大学)、加藤 史洋(早稲田大学、東京大学)、半田 匠(早稲田大学)、岩田 浩康(早稲田大学、東京大学) - 本報告では遠隔診療の現状を俯瞰するため、医療、バーチャルリアリティ、ロボット分野の関連研究を調べた。また、臨床の医師のヒアリングを経て、遠隔触診システムに求められる要求仕様をまとめた。遠隔診療ではビデオ通話による問診が行われているが、触診ができないために症状の見逃しリスクがある。患者の近くにいる看護師が患部を触れ遠隔の専門医と共有することによるシナリオが現実的な解の一つであることを考察した。
- 3D2-2
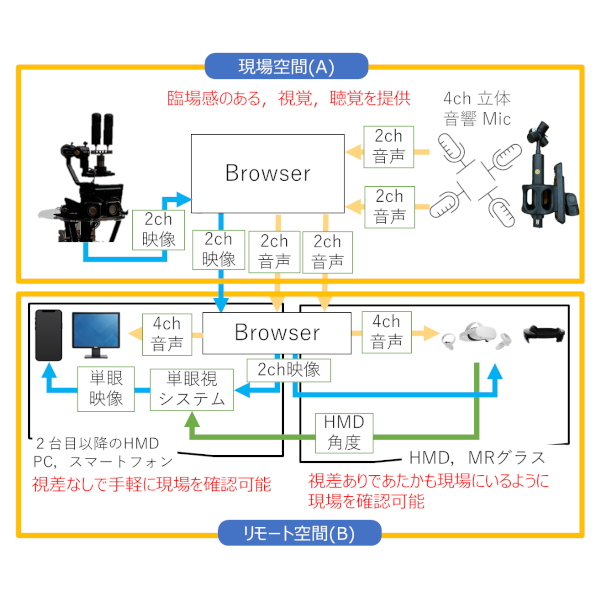
- XRによる対話支援テレエクスペリエンスシステムに関する研究
〇菊地 勇輔(東京都立大学)、加藤 綾斗(東京都立大学)、YEM VIBOL(東京都立大学)、長井 超慧(東京都立大学)、池井 寧(東京大学) - 遠隔地間で空間を共有し,共同作業を行うためには,空間の全方位に対する<#%BR%#>映像・音声を同時に複数人で共有することが必要である.アバターの<#%BR%#>表現も複数を定位させた提示により,XR空間においても自然な対話に近づける<#%BR%#>ことが可能となる.これらの機能を与えるシステム構成について紹介する.
- 3D2-3
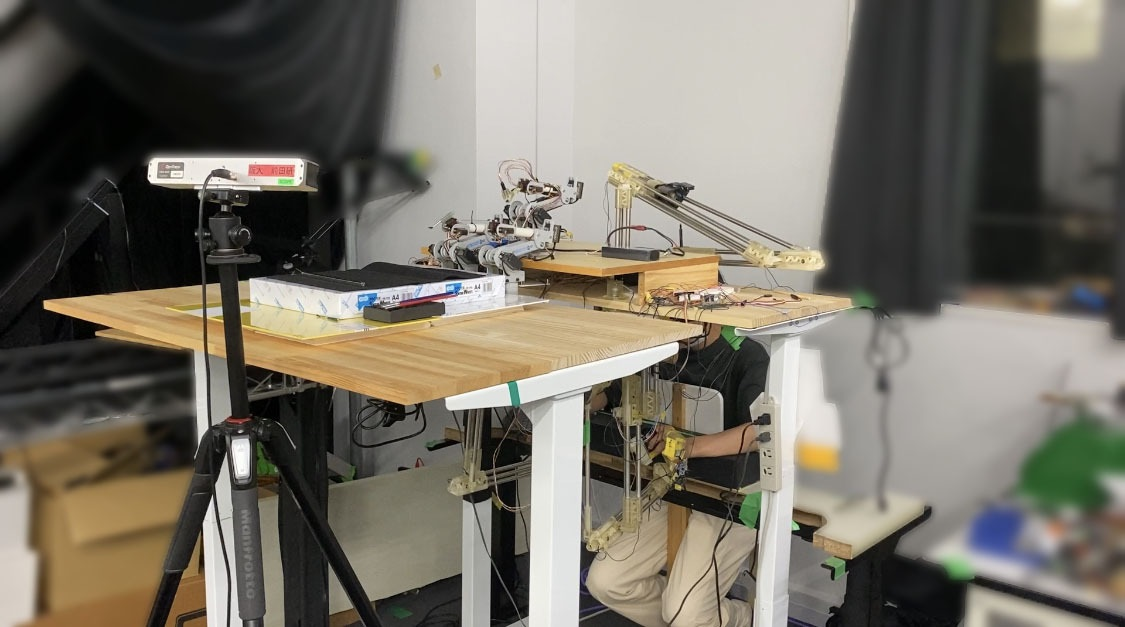
- スケールダウン環境下へのスキル伝達 ―拡張テレイグジスタンスへの挑戦 第2報―
〇平山 智貴(大阪大学 大学院情報科学研究科)、宮本 拓(大阪大学 大学院情報科学研究科、日本学術振興会)、松岡 哲平(大阪大学 大学院情報科学研究科)、大石 つぐみ(大阪大学 大学院情報科学研究科)、古川 正紘(大阪大学 大学院情報科学研究科、脳情報通信融合研究センター)、前田 太郎(大阪大学 大学院情報科学研究科、脳情報通信融合研究センター) - 従来のテレイグジスタンスは人間と等身大のフォロワを用いて実現していた.しかし人間と等身大という制約が利用可能な環境を制限しているといえる.本研究では,フォロワをスケールダウンしたテレイグジスタンスシステムを構築した.本報告では,このシステムを用いて実空間で習得したスキルがスケールダウン環境下でも発揮されることを、習字スキルの伝達実験を用いて示すことで,テレイグジスタンスの拡張可能性を提案する.
- 3D2-4
- 能動運動視による絶対奥行き知覚 ―拡張テレイグジスタンスへの挑戦 第1報―
〇松岡 哲平(大阪大学大学院)、黒川 正孝(大阪大学大学院)、宮本 拓(大阪大学大学院、日本学術振興会(DC2))、中谷内 優人(大阪大学大学院)、古川 正紘(大阪大学大学院、脳情報通信融合研究センター)、前田 太郎(大阪大学大学院、脳情報通信融合研究センター) - 人間の空間把握において両眼視と運動視がある.両眼視は図の理解,運動視は地の理解を得意としている.運動視,特に能動運動視が地の理解に必要不可欠である.しかし,従来のテレイグジスタンスにおいて,運動視は重視されておらず,奥行き知覚が十分にできなかった.そこで能動運動視による奥行き知覚の条件について整理し,実際に条件をそろえた場合,連続視点ではない映像提示でも絶対奥行き知覚が出来ることを示す.
- 3D2-5
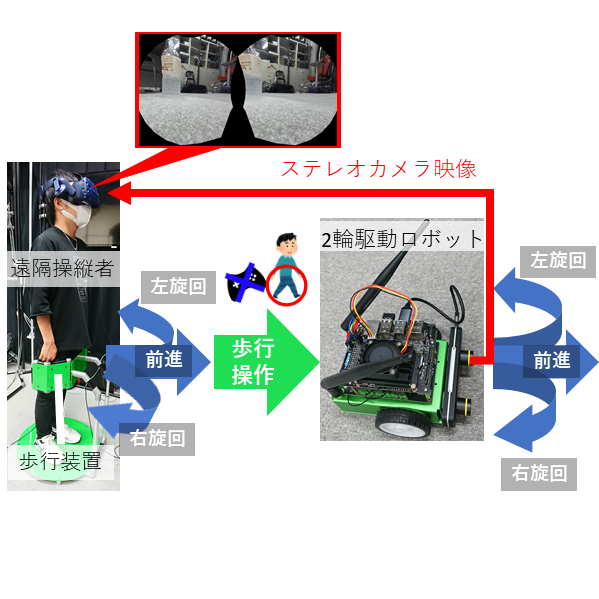
- 歩行感覚呈示可能なテレイグジスタンスシステム
〇野村 柾貴(広島市立大学)、脇田 航(広島市立大学) - 従来のテレイグジスタンスシステムでは,モーションベースによる移動感覚の呈示やコントローラによる操作が行われているが,歩行移動可能なものはあまり例がない.ユーザの歩行動作に応じて移動ロボットを操作できれば,歩行感覚をともなう高臨場なテレイグジスタンスが実現できる.そこで本研究では,手始めに歩行装置を用いて操縦者の歩行動作から2輪駆動ロボットを移動操作可能なテレイグジスタンスシステムを構築した.
- 3D2-6
- ロボットアバターを介した身体融合における運動共有の基礎検討
〇萩原 隆義(慶應義塾大学)、片桐 拓海(名古屋工業大学)、湯川 光(名古屋工業大学)、田中 由浩(名古屋工業大学)、南澤 孝太(慶應義塾大学)
- 3D2-7
- ロボットアバターを介した身体融合における役割分担に関する基礎検討
〇片桐 拓海(名古屋工業大学)、小倉 樹(名古屋工業大学)、棚田 亮平(名古屋工業大学)、西村 匠生(名古屋工業大学)、湯川 光(名古屋工業大学)、南澤 孝太(慶應義塾大学)、田中 由浩(名古屋工業大学)
- 3D2-8
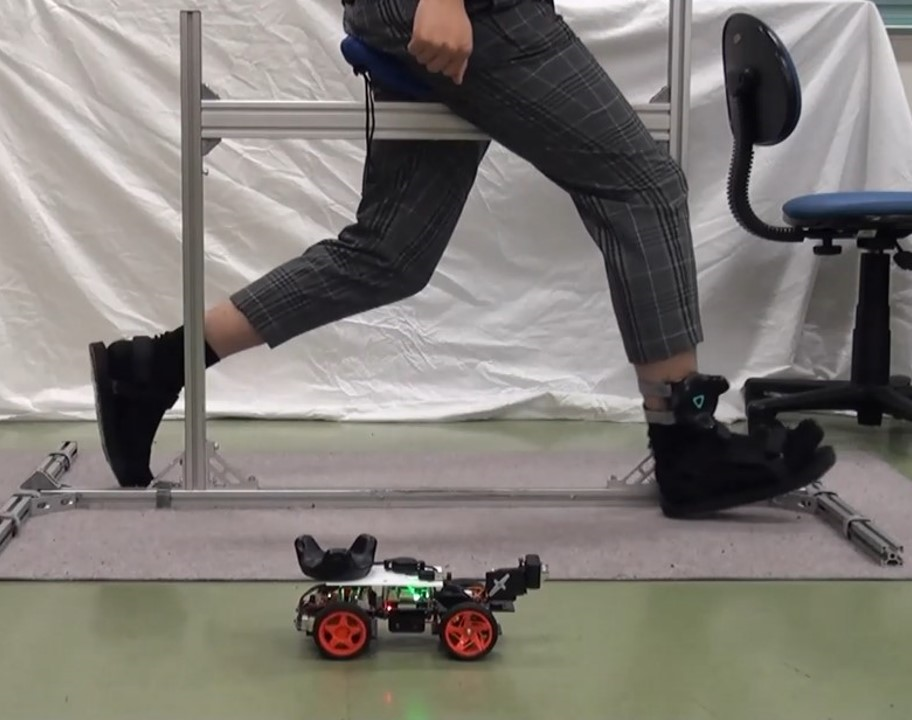
- サドル型歩行デバイスを用いた移動ロボットの遠隔操作に関する研究
〇坂口 正道(名古屋工業大学)、久米 俊輔(名古屋工業大学) - 我々は,サドルに座り体重を免荷しながら実際の歩行と同様の動作が可能なサドル型歩行デバイスを開発した.本研究では,サドル型歩行デバイスを用いた歩行動作による移動ロボットの遠隔操作を行った.本発表では,開発したシステムの概要や制御アルゴリズムについて発表する.
一般発表 13:00-14:20 モデル・計算
- 3E2-1
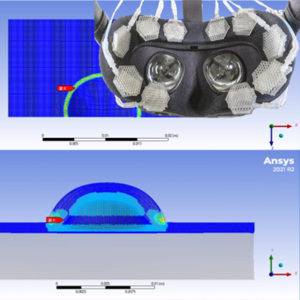
- 顔面での皮膚吸引触覚刺激における有限要素解析
〇亀岡 嵩幸(電気通信大学 大学院)、梶本 裕之(電気通信大学 大学院) - 頭部搭載型ディスプレイ(HMD)の普及とともにHMDに触覚提示装置を内蔵し,顔面へ感覚提示を行う研究が多く存在する.部位としてこれまでVR環境における指先触覚情報を顔に提示するという異部位触覚提示技術の開発に取り組んできた.そこで種々の理由により吸引触覚を利用していたが,吸引部形状および吸引気圧により異なる触覚強度,触覚の質が感じられた.本稿ではFEMシミュレーション用いることで顔面における皮膚吸引触覚刺激提示を行うために皮膚内部に発生するひずみエネルギーを観察した結果を報告する.
- 3E2-2
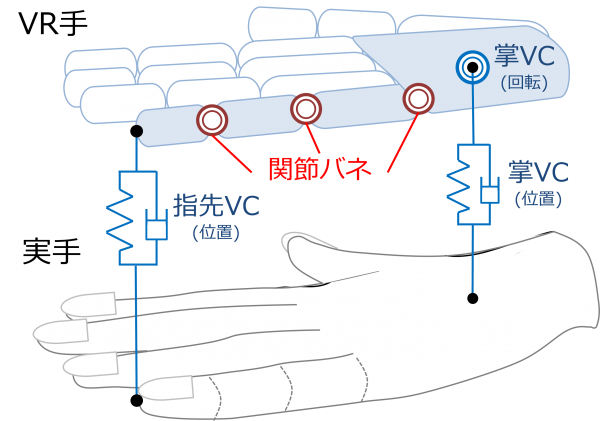
- 連成振動の抑制によるリンク構造を持つ5指VRハンドの操作性の改善
〇松木 倫太郎(東京農工大学)、高橋 拓夢(東京農工大学)、藤田 欣也(東京農工大学) - 現実の手と同様に直感的で追従性の高い指を使ったVR物体操作を目標に、我々は、リンク構造を有し、指先のみをVCで実手に追従させ、各VR指関節にバネを設置してIK法で関節角を決定する5指VRハンドを開発してきた。しかし、リンク構造に起因する連成振動の抑制が課題であった.本研究では、関節角速度に比較して指節の並進速度が安定であることに着目し、各指節の末節部に並進ダンパを設置した結果、指先への追従性を維持しつつ安定性を改善することができたので報告する。
- 3E2-3
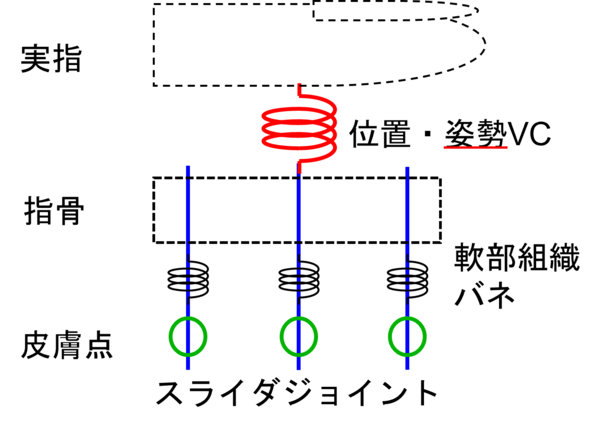
- 二指での高い物体把持剛性を実現する柔軟なVR指先モデル
〇高橋 拓夢(東京農工大学)、松木 倫太郎(東京農工大学)、藤田 欣也(東京農工大学) - 剛体物理シミュレータ上での手を用いた物体操作において,把持物体と安定に接触するために,我々は複数の皮膚点をバネによって接続した指先で構成されるVR手モデルを開発してきた.しかし,指腹面でのねじれ剛性が低く,VR指先が把持物体とともに回転することが課題であった.本研究では,皮膚点の指腹に対する接線方向運動を拘束することで,ねじれ回転を抑制した.これにより物体端部を二指把持しての姿勢維持が可能になった.
- 3E2-4
- 回転拘束および摩擦を有する粒子群による仮想レオロジー物体の変形表現
〇木村 怜(愛知工科大学)、田川 和義(愛知工科大学)
- 3E2-5
- 埋め込み変形モデルの実時間多重化処理による効率的な切断表現の提案
〇藤北 隆史(愛知工科大学)、田川 和義(愛知工科大学)
- 3E2-6
- MR画像に基づくヒト指先のモデリングと評価
〇木田 昌希(愛知工科大学)、田川 和義(愛知工科大学)
- 3E2-7
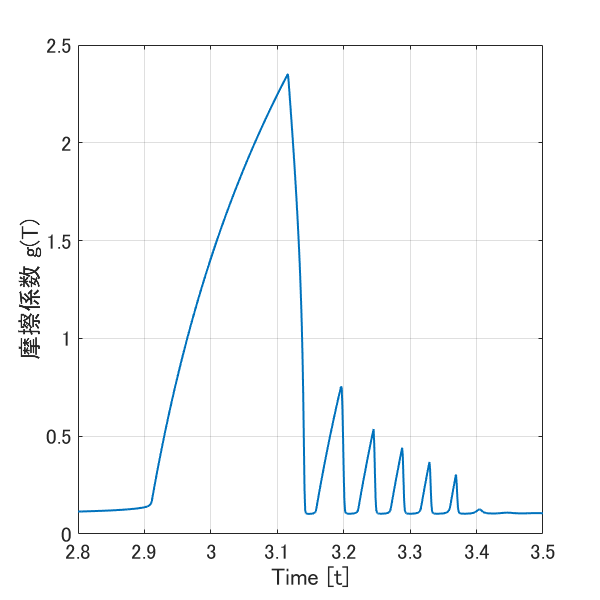
- 様々な摩擦現象を再現する力触覚レンダリングのための摩擦モデルの提案
〇中原 線(東京工業大学)、長谷川 晶一(東京工業大学) - 従来の力触覚レンダリング手法で提示される摩擦は、静止摩擦と動摩擦からなるCoulomb摩擦であった。しかし、現実にはそれ以外にも様々な摩擦現象が存在し、これらを再現することができればVRシステムにおける触覚提示の向上が期待できる。本研究では、Stribeck効果や部分滑りなどの摩擦現象を再現するLuGreモデルを拡張して、時変静止摩擦をも再現できる力触覚レンダリングのための摩擦モデルを提案する。
研究委員会OS 16:00-17:20 No Motion VRの挑戦
- 3A3
- No Motion VRの挑戦
〇雨宮 智浩(東京大学)、青山 一真(東京大学)、松本 啓吾(東京大学)、松田 勇祐(豊橋技術科学大学) - 新型コロナウイルス感染症(COVID-19)が世界中で猛威を振るう中,産業構造も変革を迫られている.サービス産業においても従来の対面型・店舗型から,遠隔型・在宅型へシフトする検討が進んでいる.本オーガナイズドセッションでは,人が家からサービスを享受することになる近未来において,重要度を増す在宅型のVRのあり方の一例として,動かないでできるVRに関する取り組みを紹介し,その技術がもたらす社会像を議論する.
一般発表 16:00-17:20 感覚・知覚(身体)
- 3B3-1
- 視覚・力覚フィードバックで拡大した手指運動によって運動イメージの増強を図るリハビリ支援システム
〇池田 開(広島大学)、木村 浩彰(広島大学)、平田 和彦(広島大学)、来間 千晶(広島大学)、栗田 雄一(広島大学) - 自発的な運動により脳機能を効率的に改善することを目的としたニューロリハビリ技術が期待されている。本研究では、筋電信号をトリガーとした空気圧人工筋による手指運動のアシストが可能なシステム、ならびに仮想空間内においてバーチャルハンドの動きとして表示できるシステムを開発した。本稿では、バーチャルハンドの手指を、実際の手指よりも大きく動作させたときに、運動の一致感へ与える影響を評価する。

- 3B3-2
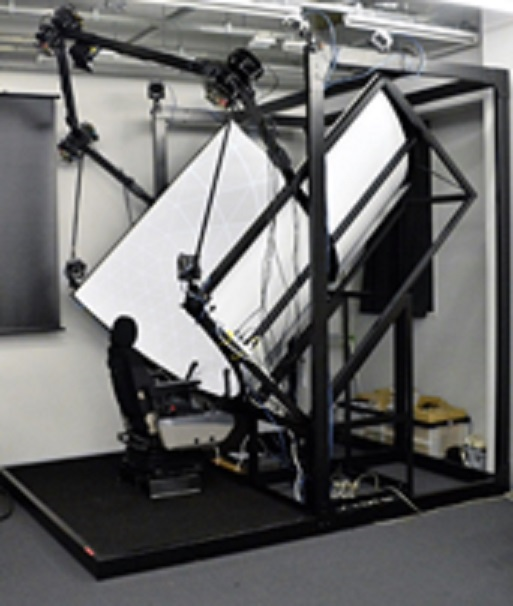
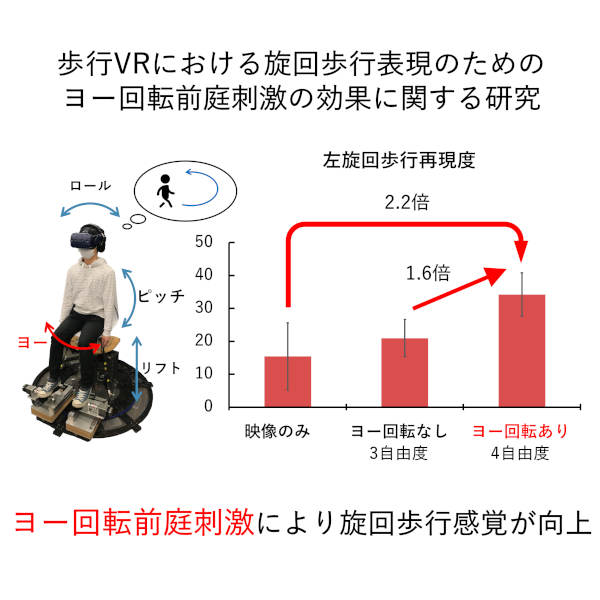
- 歩行VRにおける旋回歩行表現のためのヨー回転前庭刺激の効果に関する研究
〇海野 みのり(東京都立大)、YEM VIBOL(東京都立大)、雨宮 智浩(東京大学)、北崎 充晃(豊橋技術科学大学)、佐藤 誠(東京都立大)、池井 寧(東京大学) - 本研究では、ヨー回転を含む4自由度の前庭感覚ディスプレイ(可動座席)によって、VR歩行時の旋回歩行感覚の再現を目的とする。調整法により左旋回歩行時に最適なヨー回転刺激量を求め、調整した最適値を用い、歩行感覚の再現強度を評価した。その結果、ヨー回転刺激により、旋回歩行感覚が1.6倍~2.2倍にまで向上することが示唆され、実際歩行時の約34.2%の再現が可能となった。
- 3B3-3
- HMD装着時の主観的水平面に対する視点の高さと地面の色の影響
〇須藤 聡(名城大学 理工学研究科)、中野 拓哉(名城大学 理工学部)、柳田 康幸(名城大学 理工学部) - 直立以外の姿勢でVRを体験する際、提示映像から知覚する水平面の傾きは胴体角度に追従する事が判明しているが、それ以外は十分に検討されていない。<#%BR%#>過去研究で多くの被験者が水平面判断に地面の情報を利用していた事から、本研究では、映像内の地面の見え方を変える事でリクライニング姿勢における視覚刺激に基づく水平知覚に影響が及ぶか調査した。その結果、地面の色が視覚刺激に基づく水平知覚に影響を及ぼす事が判明した。
- 3B3-4
- 多電極システムを用いた運動点探索
〇鈴木 大河(東京大学)、松原 晟都(東京大学)、脇坂 崇平(東京大学)、青山 一真(東京大学)、稲見 昌彦(東京大学) - 電気刺激による筋収縮はリハビリテーションから力覚提示まで広く用いられているが,運動点(刺激に適した位置)はミリ単位で同定する必要があり,時間と手間がかかるという問題がある.我々は多電極システムを用いて,筋駆動に必要な最小電流量の皮膚上空間マップを作成した.結果,運動点を底とした連続的勾配を観測した.最適な電極サイズの同定実験と合わせて,ユーザーの運動を阻害しない自動的な運動点検出手法を提案する.
- 3B3-5
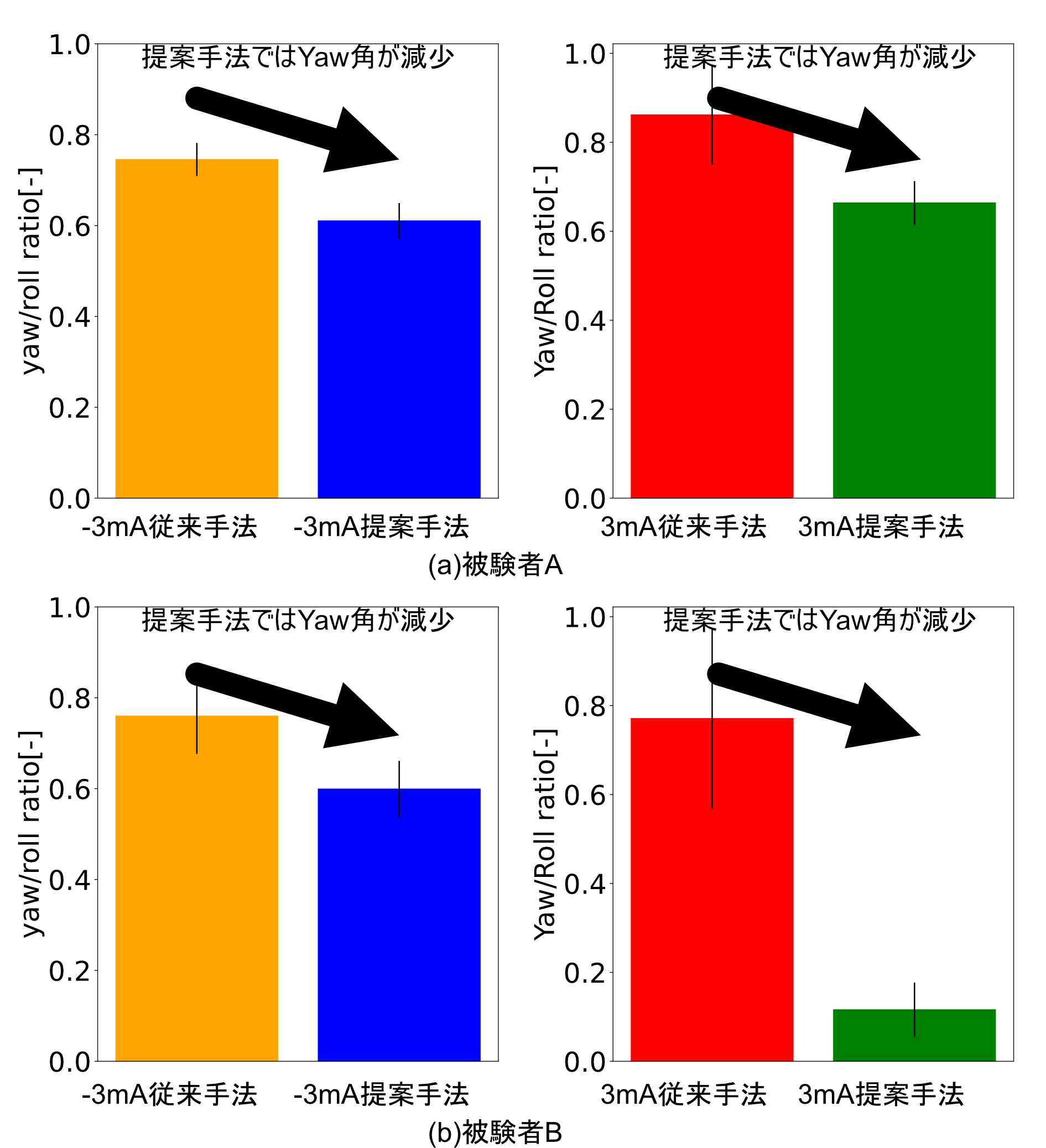
- GVSにおける加速度感覚提示の際の電極間ショートによる回り込み電流の抑制手法の提案
〇渡邉 理翔(大阪大学工学部電子情報工学科)、原 彰良(大阪大学大学院情報科学研究科、日本学術振興会特別研究員)、古川 正紘(大阪大学大学院情報科学研究科、独立行政法人 情報通信研究機構 脳情報通信融合研究センター)、前田 太郎(大阪大学大学院情報科学研究科、独立行政法人 情報通信研究機構 脳情報通信融合研究センター) - GVSは加速度感覚を提示したい方向に向けて前庭器官に貫通電流を流すことによって,感覚提示を実現する.Roll軸回りの回転感覚提示をGVSで行う際に,Roll軸回りの回転感覚に加え,期待されない方向への漏れ電流によるYaw軸回りの回転感覚が生じてしまう.本稿では,副次的な方向への感覚印象を抑制するために,漏れ電流を抑制する『電極間ショートによる回り込み電流の抑制手法』を提案し,従来手法と比較を行う.
- 3B3-6
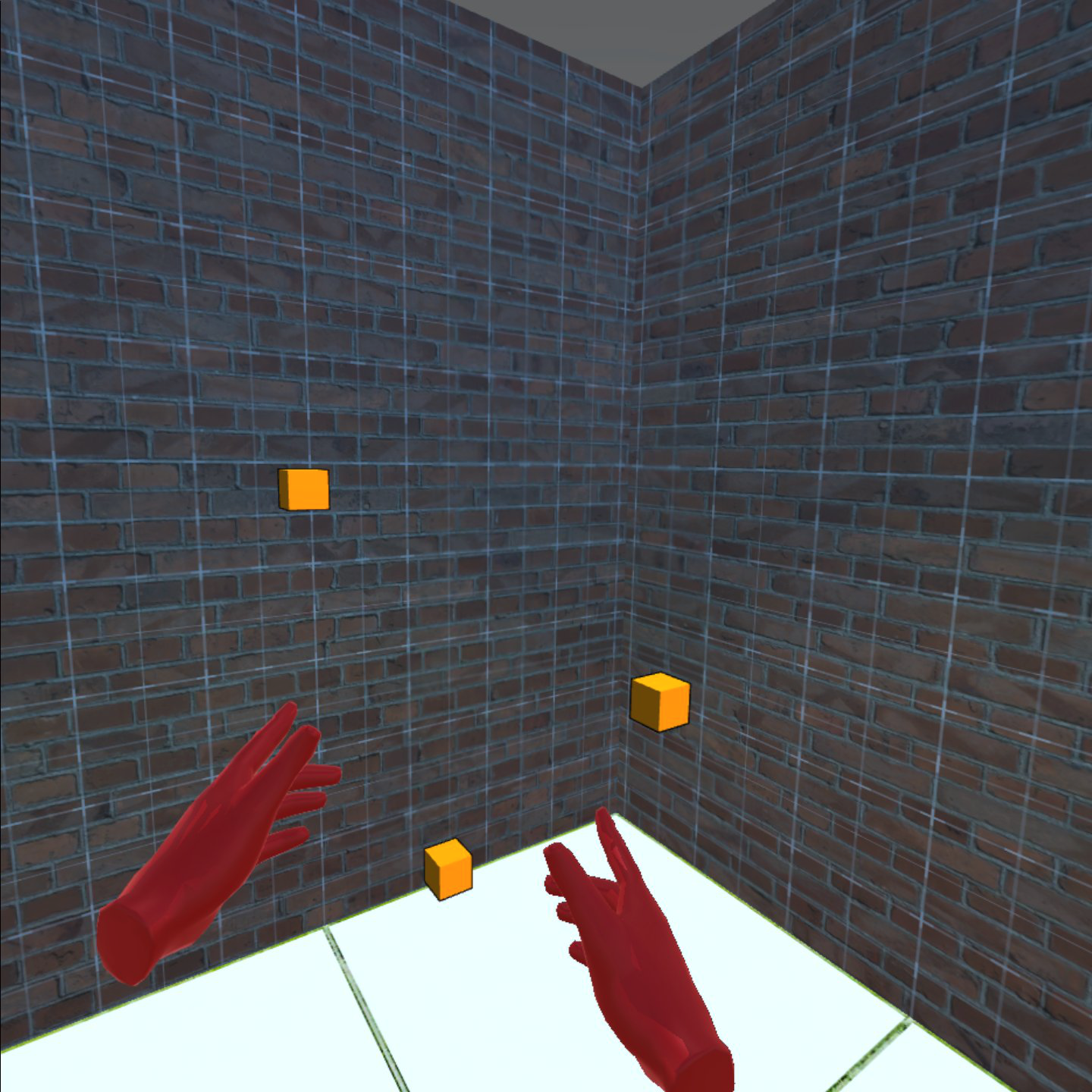
- VR空間内における近接感覚の生成に関する研究
〇松村 悠司(電気通信大学)、櫻井 翔(電気通信大学)、広田 光一(電気通信大学)、野嶋 琢也(電気通信大学) - 「近接感覚」とは,物体の接近後その衝突の回避時に得られる緊張感と達成感が混ざり合った感覚である.この感覚は身体近傍空間で得られるものとは異なり,接近体が身体を侵害する可能性がある空間で生起され、同時に快感情が得られる.この感覚を構成する要素の仮説として,接近体の軌道予測,衝突可能性,身体制御,衝突判定の4つを挙げ,実験により近接感覚がVR空間内において生成される条件を明らかにする.

- 3B3-7
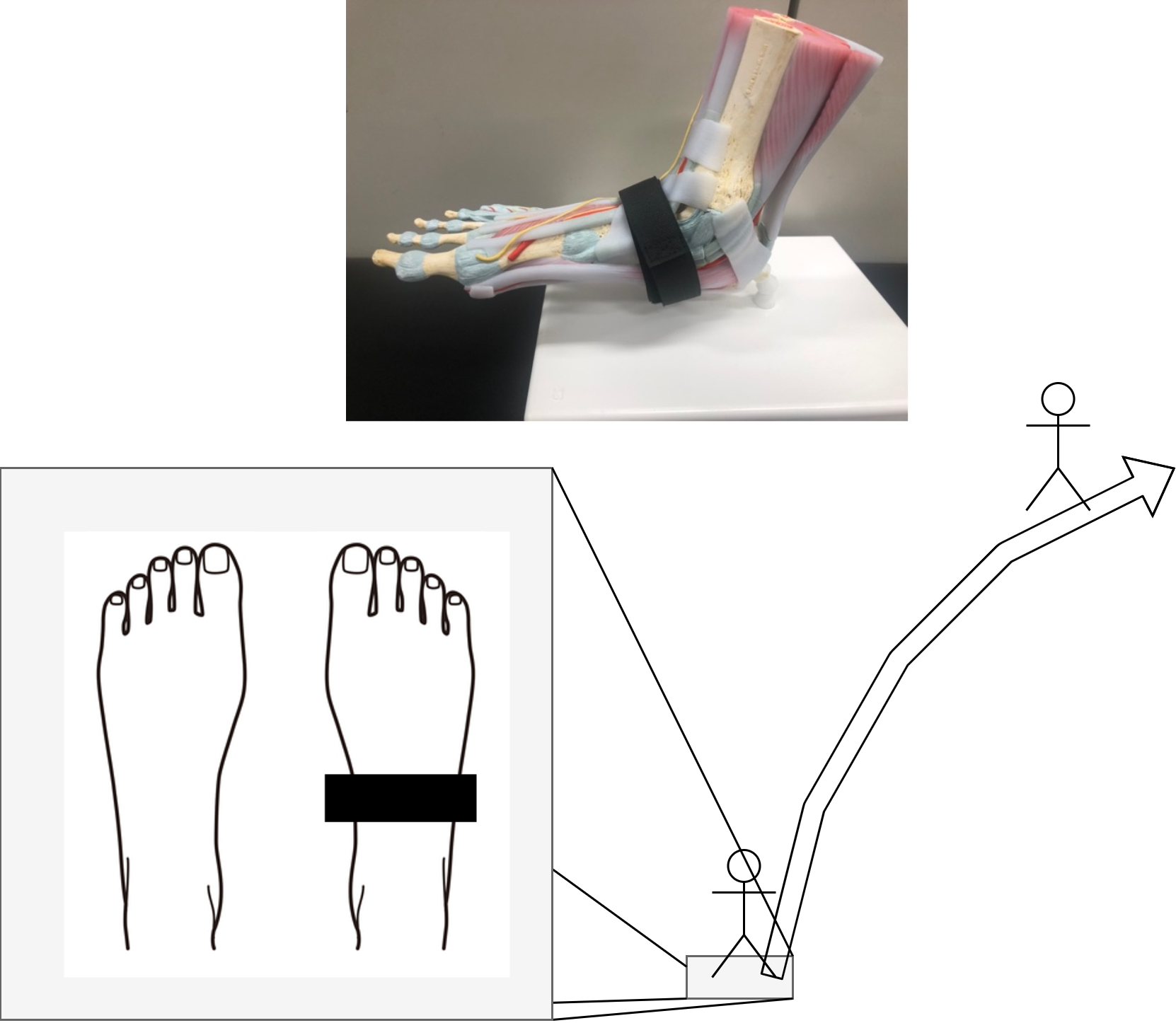
- 足部の締め付けによる歩行軌跡の操作
〇赤瀬 稔尚(東京大学)、松本 啓吾(東京大学)、吉田 成朗(東京大学)、葛岡 英明(東京大学) - 実環境・VR環境の双方で,ユーザの進行方向を無意識的に変化させる手法が求められている.一方で進行方向を変化させる手法の多くは,ユーザに進行方向の変化を意識される,特殊な装置を必要とするなどの課題が存在する.本稿では,足趾把持力と歩幅の関係性に基づき,足部の締め付けにより足趾把持力を変化させ,歩行の軌跡を操作する簡易的な手法を提案した.また,締め付けに有効な部位および原理の予備的検証を行った.
研究委員会OS 16:00-17:20 CHI 2021 振り返り,そしてこれから
- 3C3
- CHI 2021 振り返り,そしてこれから
〇北村 喜文(東北大学)、林 鋭志(Google)、高橋 哲史 (電気通信大学)、池松 香(ヤフー株式会社 / 東北大学)、山下 直美(NTT) - コンピュータヒューマンインタラクションの分野で最大かつ最も権威がある国際会議 CHIは,その39回の歴史の中で初めて,2021年5月に日本で開催される予定でした.コロナ禍で残念ながらフル・オンラインでの開催となりましたが,世界中から過去最高の5147名の参加があり,おかげさまで成功を収めることができました.運営面でそれを支えたのは約100名からなるOrganising Committeeですが,そのうち約1/3は日本の研究者コミュニティに属するメンバーでした.また,日本から例年よりも多くの方に,最新の研究成果を論文の口頭発表やデモンストレーションなどでの発表やスポンサーなどとして,ご参加いただきました.Papersの採択率は26.3% (749/2844)でした.
本オーガナイズドセッションでは,毎年,トップコンファレンス採択論文の内容を,各著者の方々にいろいろなご経験と共に紹介いただくプログラムを中心に企画してきました.今年は,我々のコミュニティでの歴史的ビッグイベントがあったということも踏まえ,その経験を次に活かすために,CHI 2021に焦点を当てることとしました.まず,CHI 2021 Papers 全投稿の上位1%(今年は28件)に送られるBest Paper を受賞された論文から2件を,それぞれ第1著者の林さんと高橋さんにご紹介いただきます.いずれも,海外の研究拠点での研究・共同研究で,その経緯などについても興味深いお話が伺えると思います.続いて,CHI 2021を含むトップコンファレンスで最近続けて論文を発表される若手のお1人で,CHI 2021 Assistant to General Chair を勤められた池松さんに,運営面でのご苦労などもお話しいただきます.最後に,ACM SIGCHIの選挙で選ばれ,2021 年7月から日本から初めてACM SIGCHI Executive Committee でご活躍中の山下さんに,これからSIGCHIはどうなるのか,私たちへの影響は?等についてお話しいただきます.国際的な学術団体の中心で幹部としてご活躍中の方のお話を伺える絶好のチャンスです.
1. 日本企業研究者からアメリカPhDを経てGoogleへ
林 鋭志(Google, recipient of CHI 2021 Best Paper Award)
2. CHIcagoで頑張った甲斐
高橋 哲史 (電気通信大学, recipient of CHI 2021 Best Paper Award)
3. CHI2021 運営と完全在宅で進めたCHI2021 Paper
池松 香 (ヤフー株式会社 / 東北大学, CHI 2021 Assistant to General Chair)
4. SIGCHI Vice President At Large になってしまって思うこと
山下 直美 (NTTコミュニケーション科学研究所, CHI 2021 Language Inclusion Chair, recepient of CHI 2021 Honarable Mention Award, SIGCHI Executive Committee Vice-President at Large)
研究委員会OS 16:00-17:20 VR空間とアバターの構築技術とVRシリーズ書籍
- 3D3
- VR空間とアバターの構築技術とVRシリーズ書籍
〇池井 寧(東京大学、都立大学)、北崎 充晃(豊橋技術科学大学)、大下 岳志(Unity Technologies)、雨宮 智浩(東京大学) - 近年,グラフィックス関連技術の進展により,VR空間の臨場感がますます高められている.さらに,アバタの利用も多様化が進んでいる.これらについて,Unity Technologies社の最近の進展を紹介いただくとともに,アバターの利用例等を提示する.また,バーチャルリアリティ関連書籍の進行状況について紹介を行う.
一般発表 16:00-17:20 ウェアラブル
- 3E3-1
- 筐体および回転軸を皮膚に固定したDCモータを用いた振動提示(第3報)
〇真鍋 光希(電気通信大学)、牛山 奎悟(電気通信大学)、髙橋 哲史(電気通信大学)、梶本 裕之(電気通信大学) - 本研究では,モータの筐体と回転軸を皮膚に固定することで,振動と牽引が提示可能な手法を提案している.前報では,振動刺激の主観的な強度と消費電力を測定し,提案と既存手法の性能を比較した.しかし既存の提示手法との比較は強度のみに留まっており、感覚の質については考慮されていなかった。本稿では提案手法を改良するとともに感覚の質の評価について述べる。

- 3E3-2
- 皮膚に固定した磁石とコイルによる触覚提示の検討
〇真鍋 光希(電気通信大学)、牛山 奎悟(電気通信大学)、髙橋 哲史(電気通信大学)、梶本 裕之(電気通信大学) - 従来のウエアラブルを前提とした小型触覚提示素子の多くは、振動子タイプでは圧覚を含めた低周波を提示することが難しく、押すタイプのものはフレームやベルトで手指全体を覆う必要があった。本稿では,皮膚に磁石とコイルを接着し、磁石とコイル双方が皮膚を駆動する部分として作用することにより,小型軽量に幅広い周波数の振動を提示でき、さらに皮膚を引き上げる方向まで含めて提示できるデバイスを提案する.
- 3E3-3
- 指先の力触覚を身体の他部位に提示するウェアラブルデバイスの開発(第4報): 左右の前腕及び足首における検討
〇森山 多覇(電気通信大学)、梶本 裕之(電気通信大学) - VR空間内の物体に対する指先への触覚提示デバイスは,指の動きを妨げてしまう問題がある.そこで,本研究では本来指先で知覚する物理的な力触覚を,身体の他部位に転移するデバイスを提案する.本稿では,親指と人差し指の指先に加わる力の大きさと方向を,左右の前腕と足首の合計4か所に,5節リンク機構を用いたデバイスで提示した.4か所の内でVR物体を操作する時に最も違和感なく,触覚を提示可能な部位について調べた.

- 3E3-4
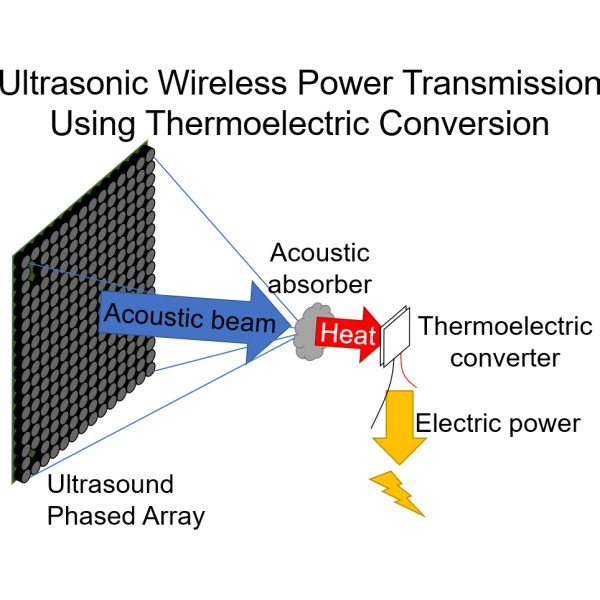
- 熱電変換を利用した集束超音波による遠隔給電
〇安藤 諒一(東京大学)、鈴木 颯(東京大学)、藤原 正浩(東京大学)、牧野 泰才(東京大学)、篠田 裕之(東京大学) - 集束超音波により, 例えば, ウェアラブル機器へ遠隔給電を行い, バッテリをなくすこと等ができる. 従来の超音波給電では, 超音波振動子に照射することで電力を取り出していた. 一方, 本研究では, 綿に集束超音波を照射した際に生じる熱を利用して発電する手法を提案する. この手法は, 受信部の指向性が存在しないといった利点がある. 本論文では, 綿とペルチェ素子を用いて提案手法の性能を評価し, 振動子を用いた手法と比較する.
- 3E3-5
- 空間認知支援のための筋電気刺激による手先誘導システム(第2報):奥行方向への誘導の基礎検討
〇木村 圭佑(筑波大学)、蜂須 拓(筑波大学)、鈴木 健嗣(筑波大学) - 本研究では高次脳機能障害者の空間認知を支援するために,筋電気刺激を用いた手先を三次元目標位置へ誘導する手法の確立を目的とする.これまでに著者らは筋電気刺激で回内・回外・掌屈・背屈運動を提示することで,二次元目標位置への誘導が可能であることを示した.本稿では皮膚電気刺激による仮現運動を用いた奥行方向への誘導手法について検討し,3自由度の手先誘導アルゴリズム,システム開発,性能評価実験について述べる.

- 3E3-6
- 皮膚塗布型素材を用いたデジタルスキンインタフェースの検討
〇谷地 卓(慶應義塾大学)、南澤 孝太(慶應義塾大学)
- 3E3-7
- 頬への触覚提示を利用したVR空間における方向誘導手法
〇中村 文彦(慶應義塾大学)、Adrien Vehulst(ソニーコンピュータサイエンス研究所)、櫻田 国治(慶應義塾大学)、福岡 正彬(慶應義塾大学)、杉本 麻樹(慶應義塾大学)
IVRC 14:30-17:20
- IVRC-1
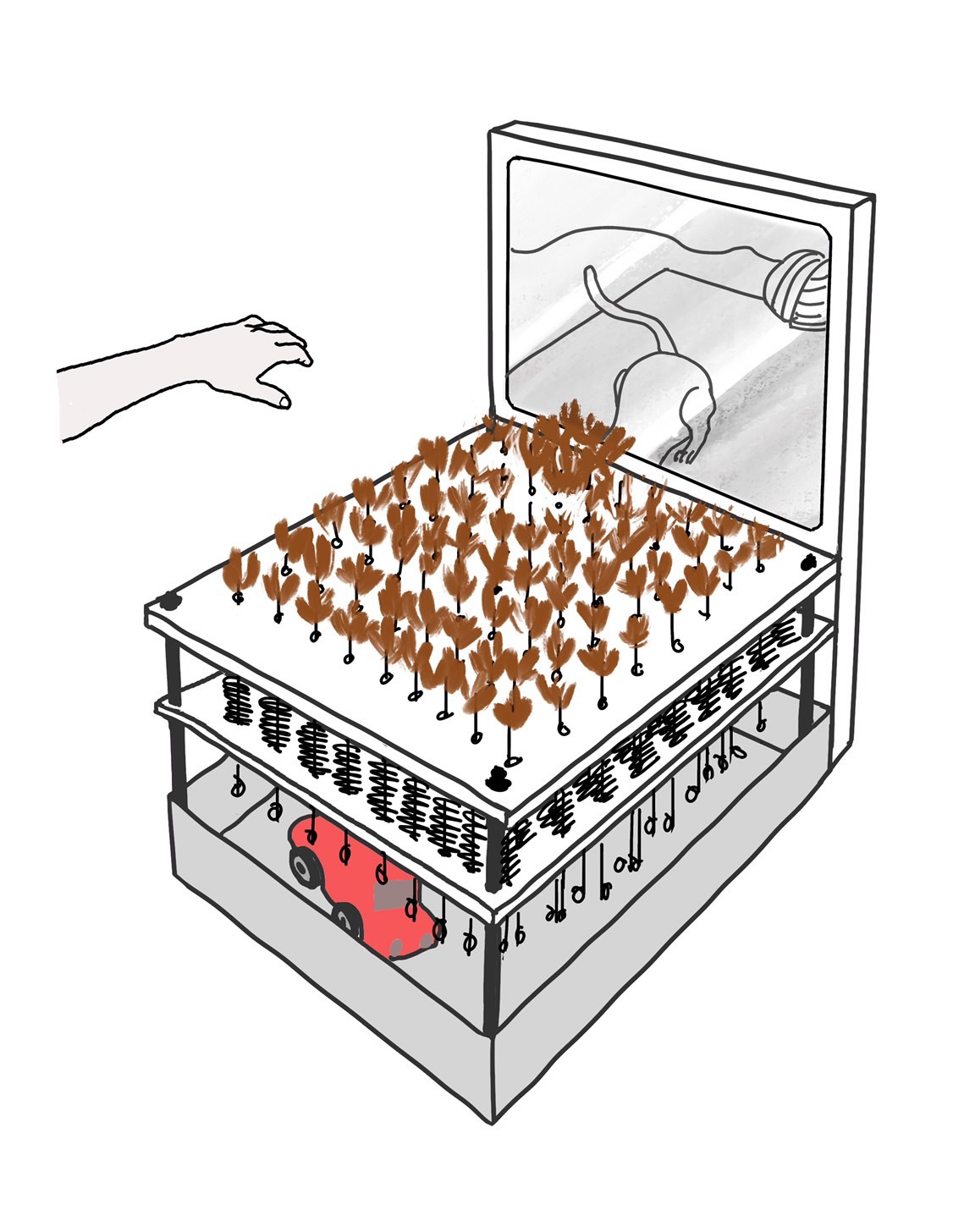
- Meta Dog
〇佐藤 尚之(筑波大学)、中村 一貴(筑波大学)、大木 郁人(筑波大学)、真保 智博(筑波大学)、平野 廉真(筑波大学)、有吉 駿太郎(筑波大学)、芝 夏穂(筑波大学) - 手間をかけずにペットを飼う手段として、バーチャルペットやペットロボットがある。本企画では、バーチャルペットとペットロボットの利点を組み合わせ、ペットとなる犬が画面上と現実空間をシームレスに行き来するペットシステムを作成する。具体的には、画面上では犬の容姿や鳴き声を再現し、現実空間では犬が飛び出してくる臨場感や疾走感、毛並み、柔らかさを表現する。「犬は飼うことができないが、飼ってみたい。」「今あるペット飼育体験のゲームやアプリでは物足りない。」といった声に我々は応える。
- IVRC-2
- ストレスをぶっ壊す!:言葉の可視化 と触覚提示を伴う破壊によるカタルシス効果の増強
〇高見 太基(電気通信大学)、安藤 将平(電気通信大学)、齋藤 旭(電気通信大学)、須賀 悠偉(電気通信大学)、中山 翔太(電気通信大学)、浜崎 拓海(電気通信大学)、矢野 裕太郎(電気通信大学) - 負の感情を口に出すことでストレスが緩和されて安心感を得られる「カタルシス効果」という心理効果がある.一方で,ストレスを軽減することができる体験として,電動シュレッダーで裁断,炎で焼却,水洗することなどが挙げられる.そこで本稿では,カタルシス効果に加え,口に出す言葉を具現化し破壊する体験をつくることで効果を増大することを目的とする.システムとしては音声入力マイク,モニタ,振動提示部で構成される.

- IVRC-3
- もう一人の自分探し
〇三谷 桃子(国立大学法人名古屋工業大学)、安田 隆哉(国立大学法人名古屋工業大学) - 本企画では、質問に答えていくことによって自分を見つめなおす体験と、アバターをパーツごとに選んで作成する体験の2つを簡単なストーリーを通じて組み合わせ、自分自身にあったアバター(もう一つの自分の姿)とはどのような姿なのかを体験者に感じてもらうことを目的としている。VR空間内でこれらを行うことにより、2つの体験を別々に行うよりもより自分に向き合って得られた気づきをアバター制作に反映させられると考える。

- IVRC-4
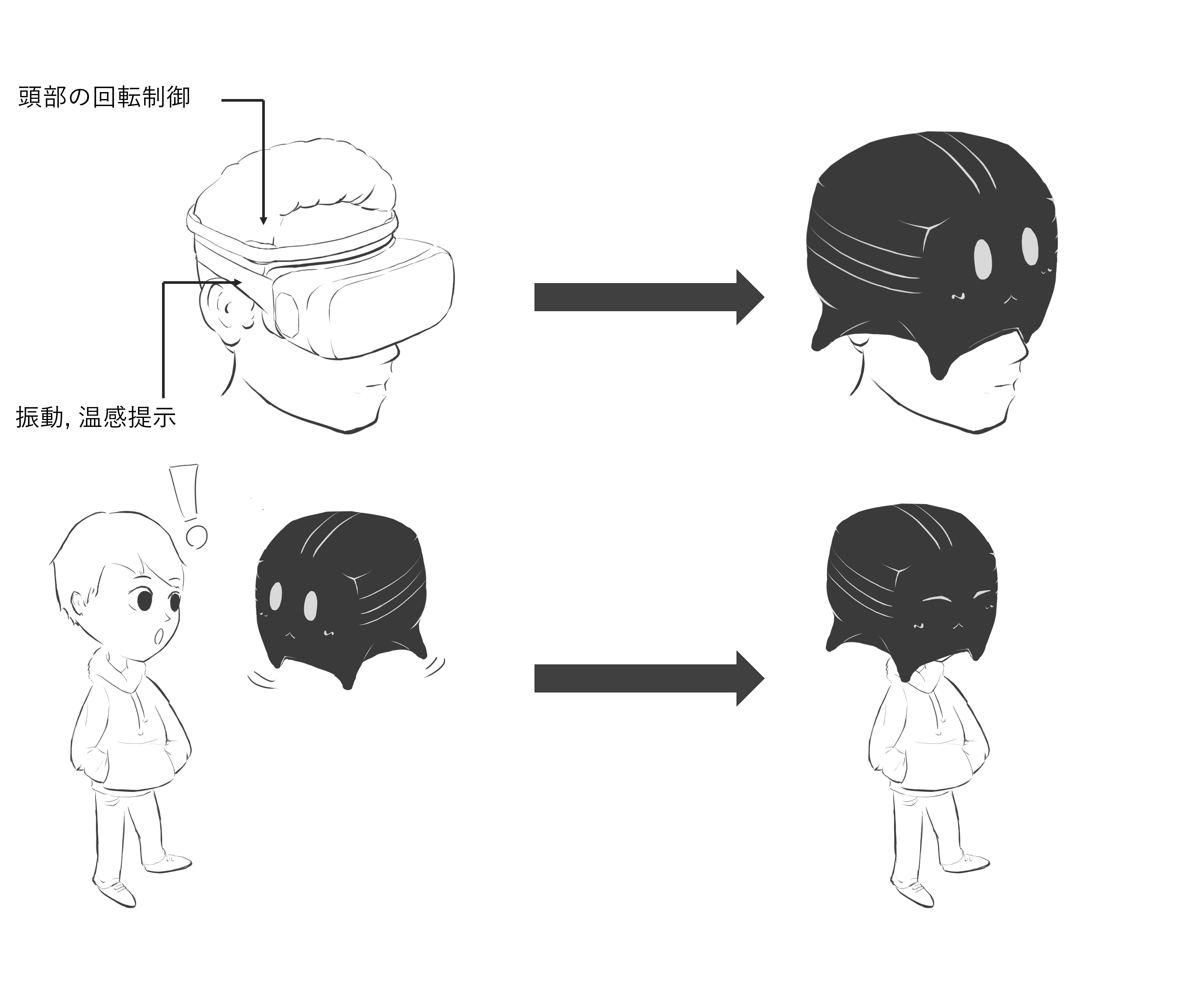
- HMD生物
〇矢野 裕太郎(電気通信大学)、齋藤 旭(電気通信大学)、須賀 悠偉(電気通信大学)、浜崎 拓海(電気通信大学)、安藤 将平(電気通信大学)、高見 太基(電気通信大学)、中山 翔太(電気通信大学) - 本稿では,ヘッドマウントディスプレイ (Head-mounted display, HMD)を生物に見立て,その生物に頭部を乗っ取られる,つまり寄生されてしまう体験を提案する. 体験者はHMDと空気圧バルーンが付いたバンドを装着する.HMD で生物の世界の知覚の仕方を,空気圧バルーンを用いたハンガー反射で頭の動きのコントロールを,スピーカーとペルチェ素子で生物の鼓動と温もりを表現する.
- IVRC-5
- 合成獣(キメラ)の錬金術師
〇福島 力也(大阪大学大学院)、松田 一武輝(大阪大学大学院)、名富 太陽(大阪大学大学院)、中谷内 優人(大阪大学大学院)、松尾 快(大阪大学大学院) - 本企画では,2種類の動物を合成することで新しい動物を生み出し,生まれた動物から合成元の動物の面影を感じる体験を提供する.ユーザは,仮想空間上で動物を吸収して体内で合成する体験を通して,動物の外見・鳴き声・体内での動きといった特徴を,視覚・聴覚・触覚から知覚する.これら3つの特徴において,合成後の動物に合成元の動物の特徴を引き継がせることで,ユーザは合成後の動物から合成元の動物の面影を感じられる.

- IVRC-6
- 体験! 指助くん ~Put your finger on me~
〇田邊 匠(京都産業大学)、板谷 佳奈(京都産業大学)、中村 陸(京都産業大学)、足立 大希(京都産業大学)、関口 湧馬(京都産業大学) - 指を「置く」、「離す」といった簡単な操作により指スケートボードの技を決めている感覚を提示する。ユーザの操作とディスプレイに映し出される指スケートボードの動作が連動し、デバイスに搭載されたキャタピラが動作し、ボードの体勢が変化する。デバイスに指を置いているだけで摩擦や振動による走行感が提示され、指をデバイスから離し、再び置くことで、指スケートボードが空中回転するような技を決めている感覚が提示される。

- IVRC-7
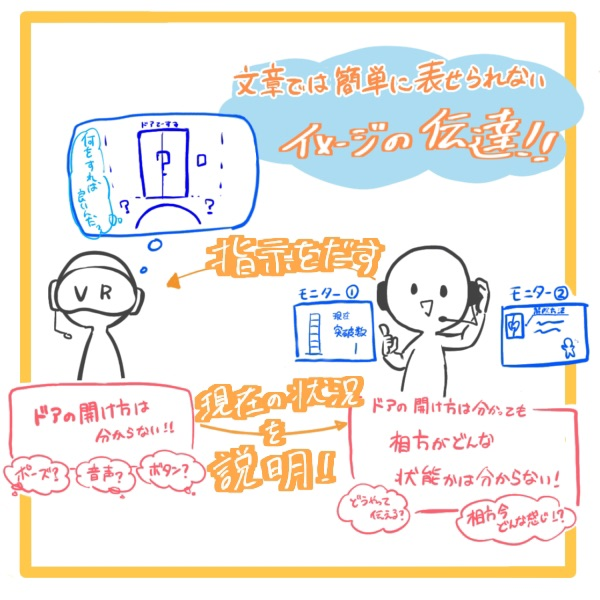
- 「言語は必ずしも万能ではない」ことのエンタメ性
〇茂木 遥(湘南工科大学情報工学科)、山根木 遼(湘南工科大学情報工学科)、佐久間 大輔(湘南工科大学情報工学科)、岡村 衛(湘南工科大学情報工学科) - 言語化の難しい事象を「ステージをクリアする陣営(スパイ側)」と「それをサポートする陣営(ナビゲーター側)」のプレイヤー二人で情報共有しつつ、ステージを進めていくVRゲームを作成した。言語化の難しい事例を現段階では3つ(後に進捗を見て増やす予定)上げてゲームに組み込み、プレイヤーたちにはその問題解決に励んでもらう。その過程の説明と実際のゲームの内容をメインに発表予定
- IVRC-8
- 今から君の手は 深海探査艇の一部です
〇飯塚 祐史(湘南工科大学)、池 海音(湘南工科大学)、本荘 大和(湘南工科大学)、竹内 裕貴(湘南工科大学) - 現実の世界では、手をロケットパンチのように飛ばすことは不可能である。我々は、深海という舞台を通じて、手を飛ばす感覚を提示するシステムを制作した。本システムは、4つのデバイスから構成され、手を発射する感覚を体験させることを目的としている。本発表を通じて、工夫や技術を駆使すれば、本来は出来ない体験が可能になることを知ってもらいたい。本企画は、子供の頃の夢を実現するための物である。
- IVRC-9
- 未然たるあなた
〇根本 悠樹(京都大学大学院) - 日本の芸術作品には古来より、「かすかな表象を以て、今目の前に見えている以上のものが感得される」という、”幽玄”と呼ばれる知覚体験がある。本企画”未然たるあなた”では、幽玄という知覚体験に根差し、受け手の自律的な想像に委ねられた情報の受け取り方を模索する。半透明な面で内部が遮蔽された箱型の装置を現実空間に据え置くことで、人の”気配”そのものとの対面を体験できる装置環境を構成する。
- IVRC-10
- ヘッドスピン体験
〇小川 泰正(慶應義塾大学大学院 メディアデザイン研究科)、応 博文(慶應義塾大学大学院 メディアデザイン研究科)、千嶋 広恵(慶應義塾大学大学院 メディアデザイン研究科)、西浦 弘美(慶應義塾大学大学院 メディアデザイン研究科)、王 七音(慶應義塾大学大学院 メディアデザイン研究科) - ブレイキン(ブレイクダンス)は2024年からオリンピックの新競技として採択された,世界でも人気のあるスポーツである.<#%BR%#>ヘッドスピンや逆立ちなどに代表される超人的な技を音楽にのせて披露し,その技の完成度や音の表現方法を競う.<#%BR%#>本企画では頭を使って回転するヘッドスピンというブレイキンの技に着目をして,座るだけで逆さまになって回転するヘッドスピンを体験できる装置を開発する.

- IVRC-11
- 夢のもふもふ
〇時枝 朋史(熊本大学)、榮 晃太郎(熊本大学)、白川 款大(熊本大学) - 現代社会は様々な動物を見かけたり,ペットを飼ったり,施設で触れ合ったりする機会が増えている.しかし新型コロナウイルスが流行り外出する機会が減り,ペットを飼っている人以外動物と触れ合う機会が減ってしまっている.動物と触れ合い,コミュニケーションを行うことで癒しや日々のストレスの解消が期待できる.さらに抱きつくという行為もストレス解消の効果があるとされている.そこで我々は家にいても巨大動物と触れ合うことができるデバイスの開発を行い,癒しの提供とストレスの解消を目指す.
- IVRC-12
- Arm Energy Blaster
〇赤塚 真仁(明治大学)、渡邊 健杜(明治大学)、濱田 紀(明治大学)、張 シズイ(明治大学)、清海 直希(明治大学)、松瀬 曉岳(明治大学)、山田 浩輝(明治大学)
- IVRC-13
- 肩り手
〇大谷 涼音(電気通信大学)、竹中 裕子(電気通信大学)、桑 雨川(電気通信大学)、大原 優祐(電気通信大学)、飯泉 謙人(電気通信大学) - 身体的な障害を抱える人々も楽しめるゲームデザインを指す「アクセシブル・ゲーミング」が近年注目されている.主に目線や声による操作が使われているが、限界がある.そこで本企画では,より自由度の高い動作が可能な肩による操作を提案する.簡単に体験できるよう市販のJoy-Conを利用し,肩を上げる,ひねる,回す動作を認識できるシステムを開発する.そして,操作入力が複雑なカーゲームにこのシステムを応用する.

- IVRC-14
- mimiclear
〇百道 ひかる(関西学院大学)、松尾 直紀(関西学院大学大学院)、池谷 駿弥(関西学院大学大学院)、岡本 裕大(関西学院大学大学院)、鳥越 麻由果(関西学院大学大学院) - 本企画はプレイヤーの体から出る普通の影とプロジェクタによって投影されるバーチャルな影が混在するスクリーンで影とのインタラクションを楽しむコンテンツである.バーチャル影はプレイヤーの影と全く同じ見た目,動きをするためプレイヤーはスクリーンに映る影が自分自身の影かバーチャル影かがわからなくなり,プレイヤーの影もインタラクションできるコンテンツの一部として利用可能になる.また,バーチャル影として「過去のバーチャル影」「現在のバーチャル影」「未来のバーチャル影」を投影することで,過去・現在・未来という違う時点の自分の姿とインタラクションでき,従来のプロジェクションコンテンツにはない時空を超えた体験を可能にする.
- IVRC-15
- mirror ⇄ ɿoɿɿim
〇池谷 駿弥(関西学院大学大学院)、松尾 直紀(関西学院大学大学院)、百道 ひかる(関西学院大学)、岡本 裕大(関西学院大学大学院)、鳥越 麻由果(関西学院大学大学院) - 本企画では,一般的なHMDを装着したまま終始VR空間内で体験するコンテンツとは違い,現実空間とVR空間の両方の空間を使用するコンテンツ体験を目指し,HMDのつけ外しによる「現実世界」と「鏡の世界」の自由な行き来が積極的に呼び起こされるコンテンツを制作する.「鏡の世界」において行動感覚の左右反転などの現実では不可能なVRならではの感覚を提示することで,プレイヤーは現実空間とVR空間の行き来の中で現実空間の感覚とVR空間の感覚の違いを強く感じ,特殊なVR空間への没入感が増幅される.また,「現実世界」と「鏡の世界」が相互に影響していると感じさせることで,現実空間とVR空間の両方を楽しむことのできるコンテンツ体験を可能にする.

- IVRC-16
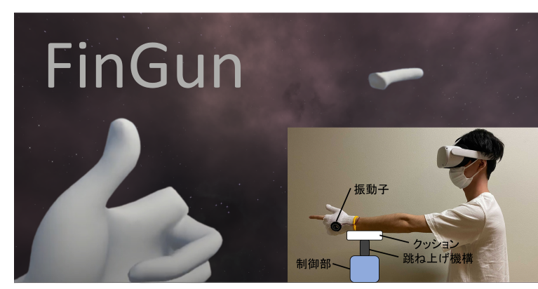
- FinGun
〇藤澤 岳瞭(奈良先端科学技術大学院大学)、音納 陸(奈良先端科学技術大学院大学)、佐々木 卓也(奈良先端科学技術大学院大学)、宮崎 滉己(奈良先端科学技術大学院大学)、磯山 直也(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - 普段気軽に行う指鉄砲の仕草をVR機器を用いた視覚的なアプローチと跳ね上げ機構によりアップグレードし,銃を撃ったようなフィードバックを生み出す.実際に手が銃になり指が飛んでいくような感覚を提示するようなシステムを開発する.また,近年ロボットアームなどの拡張身体の自己身体感についての研究が行われているが,指が飛んでいくような感覚を提示できればそういった研究分野への貢献も期待できると考えられる.
- IVRC-17
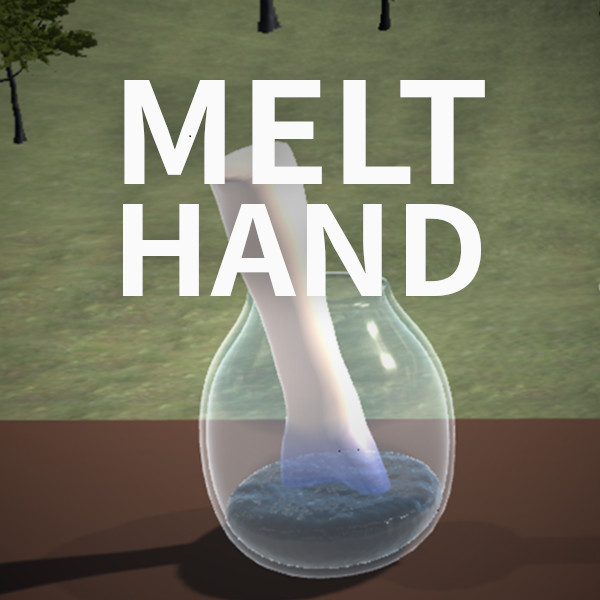
- 人間は液体と固体の両方になり得るか?
〇杉野森 拓馬(奈良先端科学技術大学院大学)、青木 大典(奈良先端科学技術大学院大学)、大塚 真帆(奈良先端科学技術大学院大学)、宮脇 亮輔(奈良先端科学技術大学院大学)、磯山 直也(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - 「猫は液体である」というジョークがある.これは,猫の身体は柔軟性が高く,体を変形させて小さい容器に収まることに由来する.このジョークから着想を得て,人体が液体になる体験が出来ないかと考えた.そこで本稿では,視覚と触覚の提示によって液体に対して身体所有感を獲得し,仮想現実での「溶ける」という新しい表現を提案する.具体的には,自分の手が高い柔軟性を持ち,液体のように容器に収まる体験を提案する.
- IVRC-18
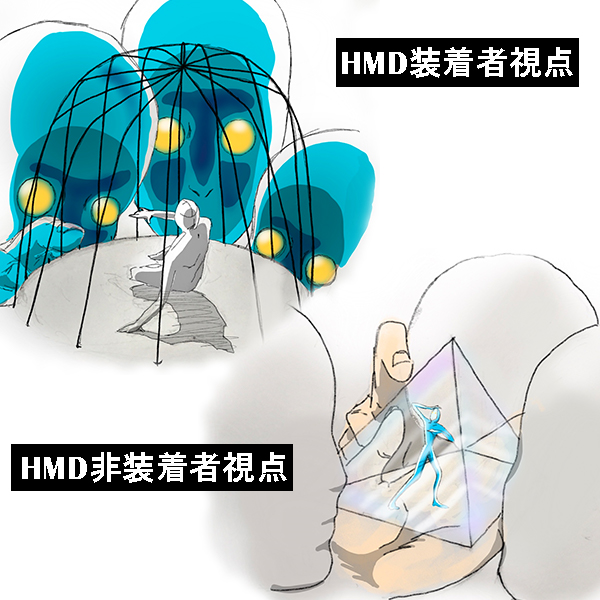
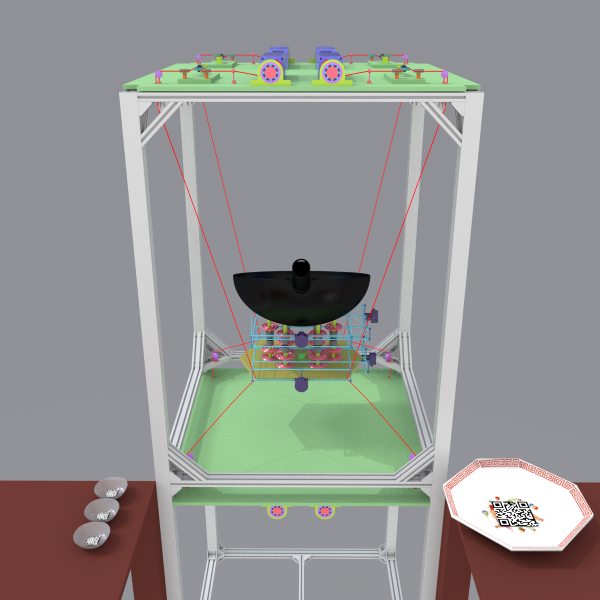
- Captured Alien
〇小川 時央(筑波大学) - HMDを装着するコンテンツは,プレイヤーは単独あるいはHMDを装着した者同士がほとんどで,それ以外の者は鑑賞者という構図が一般的である.本稿では,HMD装着者を捕らわれた宇宙人,周囲の人々を捕らえた地球人とした,バーチャル空間と実空間の相互作用が可能な体験型システム「Captured Alien」を開発する.HMD装着者は空間立体ディスプレイに投影され,周囲の人々はバーチャル空間に身体化される.
- IVRC-19
- 「転生したらコウモリだった件」
〇肱岡 希実(熊本県立大学)、石本 友里愛(熊本県立大学)、井上 可奈子(熊本県立大学)、後藤 秀輔(熊本県立大学)、田口 航大(熊本県立大学)、秦 健太郎(熊本県立大学)、平山 由馬(熊本県立大学)、深川 みのり(熊本県立大学)、藤永 由宇(熊本県立大学)、満島 成美(熊本県立大学)、山口 瑠菜(熊本県立大学)、吉島 真央(熊本県立大学) - 暗闇の中でコウモリは,超音波を発することによって対象の位置などを把握し自由自在に飛ぶ。対して人間は文明の利器を使わなければ何もできない。本企画ではVRを使うことによって,超音波で物を見るということを体験することができる.プレイヤーが声を出すと,映像内では超音波にによって物体を視認できるようになる.本企画は,プレイヤーが体重移動によって安全な道を選択し、ゴールを目指すというゲーム性を有する.

- IVRC-20
- 炒飯道 ~MRと磁力を用いた炒飯体験~
〇坂口 文哉(和歌山工業高等専門学校)、山本 泰雅(和歌山工業高等専門学校) - 炒飯道は、MRデバイスを通して体験者が手に持っている中華鍋の動きに合わせて中華鍋の中にチャーハンの描写を行い、視覚的に現実に近い挙動のチャーハン作りを再現する視覚フィードバックと、磁力により中華鍋を握ったとき、まるで本当にチャーハンが入っているかのような触覚を再現する触覚フィードバックの二つの技術を組みあわせる事により、現実に近いチャーハン作りを再現するシステムである。
- IVRC-21
- Took Target(トカゲ)
〇篠原 壮貴(甲南大学)、末吉 将也(甲南大学)、下崎 安紋(甲南大学) - 本企画では、トカゲの性質を体感する。口呼吸を促す装置を作成することで、口で匂いを感知させる。また、呼吸制御の装置を作成することで、歩くと呼吸が制限される。他にも、HMDやトラッキング装置等を用いた視覚再現や、温感提示装置による臨場感の発揚、尻尾が切り離される間隔の再現等を行う。複合的にトカゲの性質を盛り込むことによって、トカゲの生態について理解を深める体験を提供する。

- IVRC-22
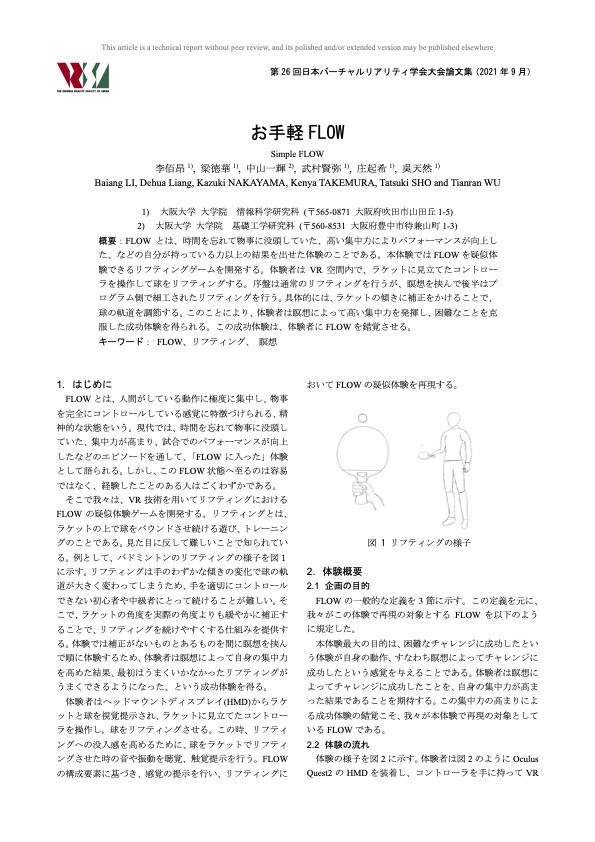
- お手軽FLOW
〇武村 賢弥(大阪大学)、吳 天然(大阪大学)、梁 徳華(大阪大学)、中山 一輝(大阪大学)、李 佰昂(大阪大学)、庄 起希(大阪大学) - FLOWとは、自分が持っている力以上の結果を出せた体験のことである。本体験ではFLOWを疑似体験できるリフティングゲームを開発する。体験者はVR空間内で、ハンドデバイスを操作して球をリフティングする。序盤は通常のリフティングを行うが、瞑想を挟んで後半は細工されたリフティングを行う。このことにより、瞑想によって困難なことを克服した成功体験を得られる。この成功体験は、体験者にFLOWを錯覚させる。
- IVRC-23
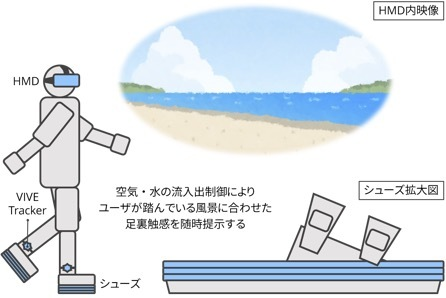
- なぎさんぽ
〇松尾 彰太(奈良先端科学技術大学院大学)、押見 洋土(奈良先端科学技術大学院大学)、窪田 太一(奈良先端科学技術大学院大学)、横路 海斗(奈良先端科学技術大学院大学)、磯山 直也(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - 本企画では,自宅にいながら海岸散歩を体験できるシステムを提案する. コロナ禍により,リモート会議等外出を省略するサービスが流行したが,旅行など外出自体を楽しむ行為に代わるサービスは少ない.VR旅行体験などが存在するが,実際の旅行では歩行を伴うため,臨場感を得るには視覚だけでなく,場所に応じた足裏感覚の提示が重要であると考える.そこで,幅広い表現が求められる海岸散歩を実現するシステムの開発を目指す.
- IVRC-24
- 水上忍者アメンボでGO
〇福島 史道(立教池袋高等学校)、林 幸希(立教池袋高等学校) - アメンボの姿に幼い頃の温かな記憶が思い起こされる。この風情・文化が現在、様々な要因によって消滅の危機に追い込まれているという。文化を後世に遺し、伝えていくことが我々の役割である。本体験ではその文化をアメンボの視点に立ち、川を下る疑似体験をもって伝承する。体験中には様々な外敵や人工漂流物、餌となる虫に遭遇する。アメンボの五感を再現し、体感することで自然界を肌で感じることが最大の目的である。

- IVRC-25
- ウォーキングデッ登山
〇増田 桜日(長野県松本工業高校)、續木 信吾(長野県松本工業高校)、横山 良真(長野県松本工業高校)、筒井 健翔(長野県松本工業高校)、朝倉 拓也(長野県松本工業高校)、太田 定治(長野県松本工業高校)、北澤 一途(長野県松本工業高校)、竹内 啓吾(長野県松本工業高校)、柳澤 健太(長野県松本工業高校) - 座ったまま歩行感覚を提示する装置の仕組みとウォーキングデッ登山のゲーム概要を発表します。
技術・芸術展示 14:30-15:50 技術・芸術展示
- 3G-1
- 簡易没入型VR歩行システムによるVRSNSへの入力機器エミュレーション
〇木戸 功了(広島市立大学)、脇田 航(広島市立大学) - VRChatやCluster等のVRSNSではフルボディトラッキングによってVR空間内を自身の足で歩き回ることができるが,歩行可能な空間の確保の問題やVR酔いの問題がある一方,VR空間内を歩行するための装置についてもコストや安全性等の問題がある.そこで本研究では,ユーザの進行方向に大腿部を支持し,推定した歩行動作に応じて映像呈示することで歩行感覚を錯覚可能な簡易没入型VR歩行システムを用いて既存のVRSNSへの入力機器エミュレーションを行う.
- 3G-2
- 歩行感覚呈示可能なテレイグジスタンスシステム
〇野村 柾貴(広島市立大学)、脇田 航(広島市立大学) - 従来のテレイグジスタンスシステムでは,モーションベースによる移動感覚の呈示やコントローラによる操作が行われているが,歩行移動可能なものはあまり例がない.ユーザの歩行動作に応じて移動ロボットを操作できれば,歩行感覚をともなう高臨場なテレイグジスタンスが実現できる.そこで本研究では,手始めに歩行装置を用いて操縦者の歩行動作から2輪駆動ロボットを移動操作可能なテレイグジスタンスシステムを構築した.
- 3G-3
- 様々な摩擦現象を再現する力触覚レンダリングのための摩擦モデルの提案
〇中原 線(東京工業大学)、長谷川 晶一(東京工業大学) - 従来の力触覚レンダリング手法で提示される摩擦は、静止摩擦と動摩擦からなるCoulomb摩擦であった。しかし、現実にはそれ以外にも様々な摩擦現象が存在し、これらを再現することができればVRシステムにおける触覚提示の向上が期待できる。本研究では、Stribeck効果や部分滑りなどの摩擦現象を再現するLuGreモデルを拡張して、時変静止摩擦をも再現できる力触覚レンダリングのための摩擦モデルを提案する。
- 3G-4
- 指先の力触覚を身体の他部位に提示するウェアラブルデバイスの開発(第4報): 左右の前腕及び足首における検討
〇森山 多覇(電気通信大学)、梶本 裕之(電気通信大学) - VR空間内の物体に対する指先への触覚提示デバイスは,指の動きを妨げてしまう問題がある.そこで,本研究では本来指先で知覚する物理的な力触覚を,身体の他部位に転移するデバイスを提案する.本稿では,親指と人差し指の指先に加わる力の大きさと方向を,左右の前腕と足首の合計4か所に,5節リンク機構を用いたデバイスで提示した.4か所の内でVR物体を操作する時に最も違和感なく,触覚を提示可能な部位について調べた.
- 3G-5
- 無関帯での予冷予熱温度の差によるThermal grill illusion発生時間の変化
〇木本 涼太郎(熊本大学院)、嵯峨 智(熊本大学院) - 我々の以前の研究では予熱予冷を行いThermal grill illusionを行うと痛みを知覚するまでの時間が短縮されることがわかった。そこで人が温覚冷覚共に順応する無関帯と言われる温度帯である30℃から36℃の間で予熱予冷の温度の差を±1℃、±2℃、±3℃と大きくして行った場合の痛みを知覚するまでの時間変化を定量的に評価する。
- 3G-6
- ソーシャルVRコンテンツにおけるアバタへの吹き出し表現の付与による発話者同定手法の提案
〇楊 光(立命館大学)、松村 耕平(立命館大学)、野間 春生(立命館大学)、大井 翔(大阪工業大学) - ソーシャルVRコンテンツでは、VR空間においてアバタを媒介として音声によるユーザ同士のコミュニケーションが可能である。このコンテンツにおける問題点として、発話中のユーザを特定することが難しいことや、どのユーザがなんの会話をしているのかの同定が難しいことがある。本研究では、発話中のアバタに吹き出しを付与することでこれらの問題を解決することを目指す。
- 3G-7
- VR環境でのコミュニケーションにおける鏡の効果
〇亀岡 嵩幸(電気通信大学 大学院)、金子 征太郎(電気通信大学 大学院) - VRSNSにおいてユーザーが鑑の前に集まる現象が知られている。VR空間上の鑑はアバターに対する自己身体性を生起させることが知られているが、我々は鑑の存在が他者へのプレゼンスを向上させ、ひいてはコミュニケーションの円滑化に繋がるのではないかと考えた。本発表ではVR空間における鑑の存在がユーザーにどのような行動を誘発するのか実験的に調査した結果を報告する。
- 3G-8
- サドル型歩行デバイスを用いた移動ロボットの遠隔操作に関する研究
〇坂口 正道(名古屋工業大学)、久米 俊輔(名古屋工業大学) - 我々は,サドルに座り体重を免荷しながら実際の歩行と同様の動作が可能なサドル型歩行デバイスを開発した.本研究では,サドル型歩行デバイスを用いた歩行動作による移動ロボットの遠隔操作を行った.本発表では,開発したシステムの概要や制御アルゴリズムについて発表する.
- 3G-9
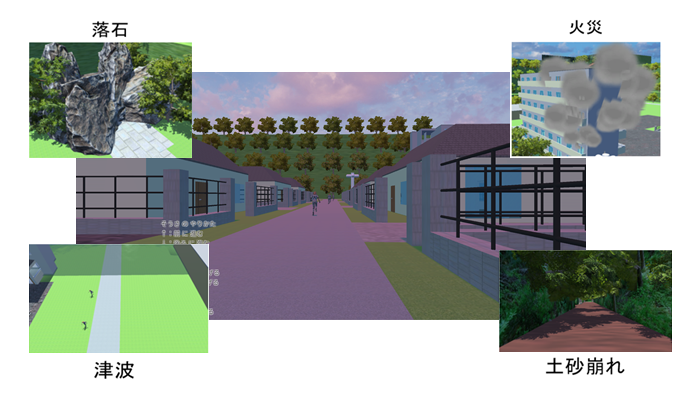
- 避難訓練アプリケーションDeVAを活用した避難者行動の傾向調査
〇福本 考生(大阪工業大学)、大井 翔(大阪工業大学)、松下 智晴(大阪工業大学)、菊池 晶陽(大阪工業大学)、佐野 睦夫(大阪工業大学)、後藤 壮史(奈良県王寺町立王寺小学校) - 我々はこれまでに避難者を対象とした災害体験アプリケーションDeVAの開発を行っている.DeVAはNPCによる災害心理モデルを組み込み,様々なシナリオを体験し、避難者の行動とその評価を振り返ることで,避難者に防災意識を定着させるアプリケーションである.しかし,一部の避難者の体験を確認したところ,同じ行動パターンで作業的に体験している避難者がいた.そこで,本研究ではDeVAによって災害時における避難者の防災行動を調査する.
- 3G-10
- 授業訓練システムにおけるマルチエージェントプランニングに関する検討
〇桝本 智絵(大阪工業大学大学院)、大井 翔(大阪工業大学)、佐野 睦夫(大阪工業大学) - 教員志望者が実習など実際の現場で授業を訓練する機会は少ない。実践経験が少ないまま現場に出ることで、自身の想定と違う出来事にギャップを感じストレスになる可能性がある。そこで本研究では、仮想的な教室をスクリーンに映し出し授業の訓練ができるシステムを提案する。授業の評価をリアルタイムで行い外部パラメータを操作する。また生徒エージェントが他のエージェントに干渉して動作することで教室の雰囲気を作り出す。

- 3G-11
- フライ捕球における苦手原因を気づかせるVR支援システムの提案
〇上田 浩嗣(大阪工業大学)、橋本 渉(大阪工業大学)、西口 敏司(大阪工業大学)、水谷 泰治(大阪工業大学) - 野球のフライ捕球において何が苦手意識(恐怖心)を生む原因になっているかをVR空間上でフライ捕球を行うことで気づかせることを目的とする。また、その原因の改善のためにVR空間で適切な支援が可能かどうか検討する。
