Sept. 13 2021
9月13日(月)
このプログラム速報版は7月30日更新版です。座長は掲載していません。
研究委員会OS 9:00-10:20 ポストコロナ×テレイマージョン
- 2A1
- ポストコロナ×テレイマージョン
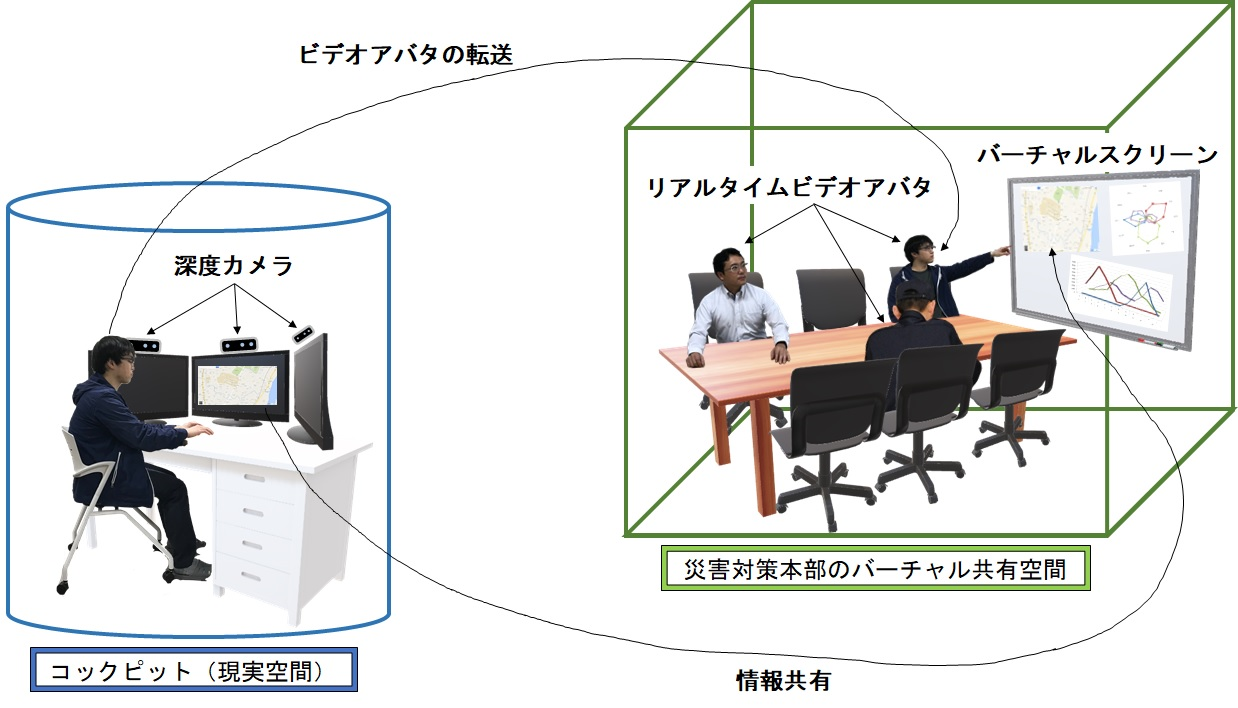
〇小木 哲朗(慶應義塾大学)、宮地 英生(東京都市大学)、江原 康生(大阪電気通信大学)、石田 智行(福岡工業大学) - 依然として新型コロナウイルス感染症(COVID-19)が世界中で猛威を振るう中,テレイマージョン(Tele-Immersion)技術は重要性が増していると考えられる.従前のテレイマージョンは,没入型表示装置や大画面・高精細表示システムを用いた遠隔利用者とのコミュニケーションが主であったが,5Gの登場や安価なヘッドマウントディスプレイ(HMD : Head Mounted Display)が注目を集めている昨今,多彩なテレイマージョンの実現が可能となっている.本オーガナイズドセッションでは,テレイマージョン技術研究委員会のメンバーが取り組んでいるテレイマージョンの現状と展望を紹介する.
一般発表 9:00-10:20 心理
- 2B1-1
- 鼻部皮膚温度刺激を介した緊張感制御による作業能率向上手法の提案
〇森 万由花(名城大学)、藤嶋 英治(名城大学)、柳田 康幸(名城大学) - 作業時の適度な緊張が高いパフォーマンスをもたらすとするヤーキーズ・ドットソンの法則,情動が外部刺激による身体反応の知覚により発生するというジェームズ・ランゲ説,および緊張と鼻部皮膚温度の関連性に基づき,鼻部皮膚の温度制御によって作業能率を向上させる手法を提案する.精神負荷課題のパフォーマンスを調査したところ,適度な鼻部冷却によるパフォーマンスの向上が示唆された.

- 2B1-2
- ジェンダー・アイデンティティが同性または異性のアバターの身体化に及ぼす影響
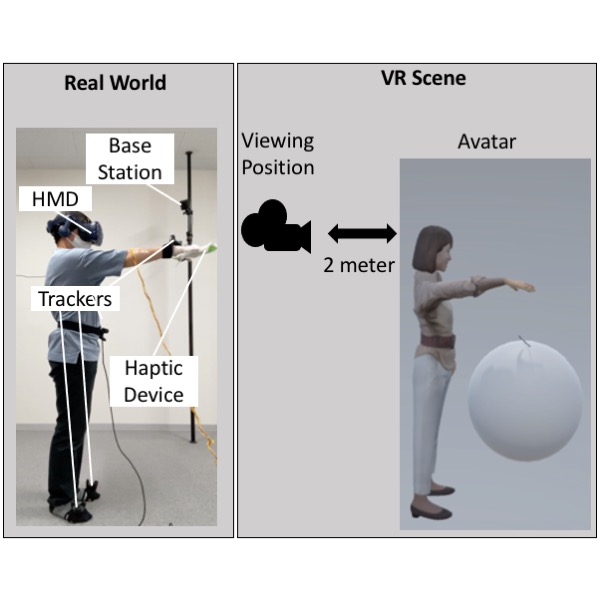
〇花島 諒(産業技術総合研究所、筑波大学)、大山 潤爾(産業技術総合研究所、筑波大学) - アバターを実際の自身の身体のように感じる身体化には、視覚と触覚の同期や視覚と運動の同期や外見の類似性に加え、自己概念が関わることが示唆されている。本研究では、性別に関する自己概念であるジェンダー・アイデンティティが、アバターの身体化にどのように関わるのかを顕在指標および潜在指標を用いて検討した。
- 2B1-3
- VR空間で提示する視覚刺激の時間速度が体感時間に与える影響の検証
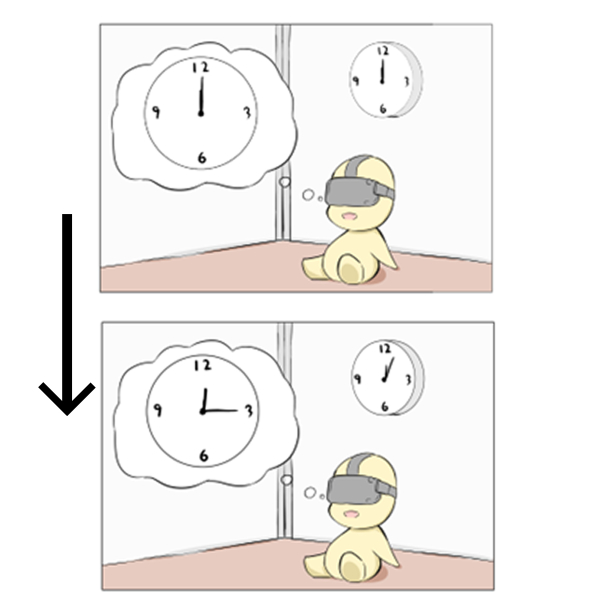
〇小池田 樹(立命館大学 理工学研究科)、神長 伸幸(ミイダス株式会社HRサイエンス研究所)、山田 悟史(立命館大学 理工学部) - 人の体感時間は視界に入る物体の移動速度や情報量、タスク等、様々な事象から影響を受け変化する。そして、没入感の高い経験が可能なVRでは、体感時間がより強い影響を受ける可能性がある。そこで本研究では、VR空間における映像刺激に着目し、異なる時間速度を持つ視覚刺激が体感時間に与える影響を検証する。
- 2B1-4
- バーチャルマッサージロボットの動作と形状による心理的効果
〇加藤 優貴(豊橋技術科学大学)、井上 康之(豊橋技術科学大学)、原口 岳丸(豊橋技術科学大学)、田崎 良佑(青山学院大学)、秋月 拓磨(豊橋技術科学大学)、真下 智昭(豊橋技術科学大学)、本名 敦夫(株式会社リッコー)、北崎 充晃(豊橋技術科学大学) - 本研究では,VR空間でマッサージロボットの社会的印象に動作(不連続,滑らか)と手の形状(ボール,ロボットハンド,人の手)が及ぼす効果を社会的属性尺度(RO-SAS)で調べた。その結果,マッサージロボットが滑らかな動きをする場合の方が,より有能で暖かく快適であると認知され,ボールエンドエフェクタよりも人の手の方が,より暖かい印象を受けることが分かった。

- 2B1-5
- 時間的差異のある複数アバター映像呈示の自己身体認識に対する影響に関する研究
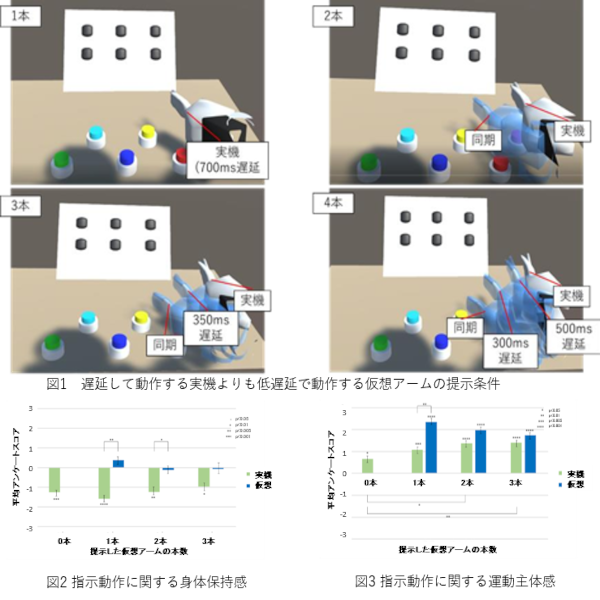
井岡 裕也(明治大学)、〇大山 英明(産総研)、岡田 浩之(玉川大学)、嶋田 総太郎(明治大学) - テレイグジスタンス型ロボット操縦において,ロボットの動作の遅延は、ロボット機体に対する自己身体認識を劣化させる.700ms遅延して動作する,実機を模擬したVR空間中のロボットアームに対して,遅延無く動作する予測アームや実機よりも遅延が少ない分身アームを呈示した状態でタスクを行うと,どのように自己身体認識が変化するかを実験により調査した.仮想アームの提示により運動主体感が強化されることが判明した.
- 2B1-6
- バーチャル環境における人とロボットに対する羞恥の共感
〇東畑 健斗(豊橋技術科学大学大学院)、佐藤 徳(富山大学)、板倉 昭二(同志社大学)、北崎 充晃(豊橋技術科学大学大学院) - 他人が恥ずかしい様子を見て自分が恥ずかしいと感じることを羞恥の共感という。人はロボットの痛みにも共感できるが、恥ずかしさに共感するかは明らかになっていない。そこで、ロボットの恥ずかしさについて共感できるかをバーチャル環境で検証した。その結果、人とロボットのどちらに対しても恥ずかしさの共感を示したが,人よりもロボットの方が恥ずかしさが低減していることが分かった。

一般発表 9:00-10:20 ユーザインタフェース
- 2C1-1
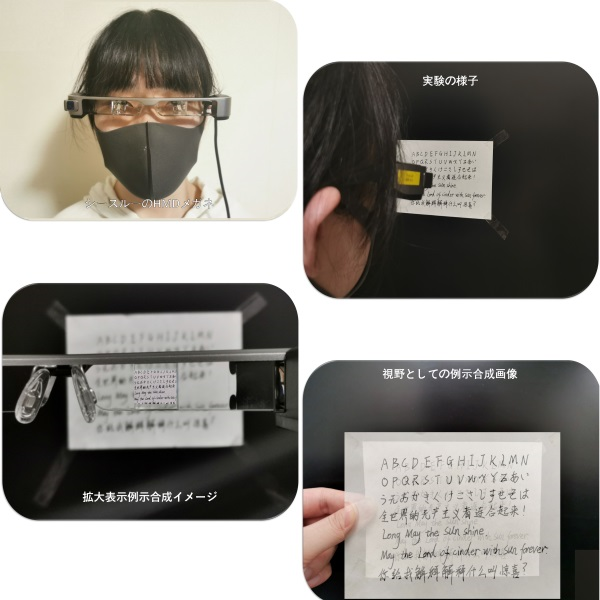
- 老視者のための実際の紙が拡大されたように見えるARドキュメント拡大眼鏡
〇顔 晟裕(名古屋工業大学)、舟橋 健司(名古屋工業大学)、秋元 遼太(名古屋工業大学) - 年齢の高い人はデジタル文書よりも印刷された文書を読む傾向がある。しかし、作業を行いながらの文書確認が必要な場合には老眼鏡の着脱などが煩雑である。本研究ではメガネ型シースルーHMDを用いたAR紙文書ズームシステムを提案する。本システムを利用することで、拡大された紙の文書をメガネ越しに簡単に読むことが可能である。老眼鏡よりも他の仕事をする場合などに有用であることが期待される。
- 2C1-2
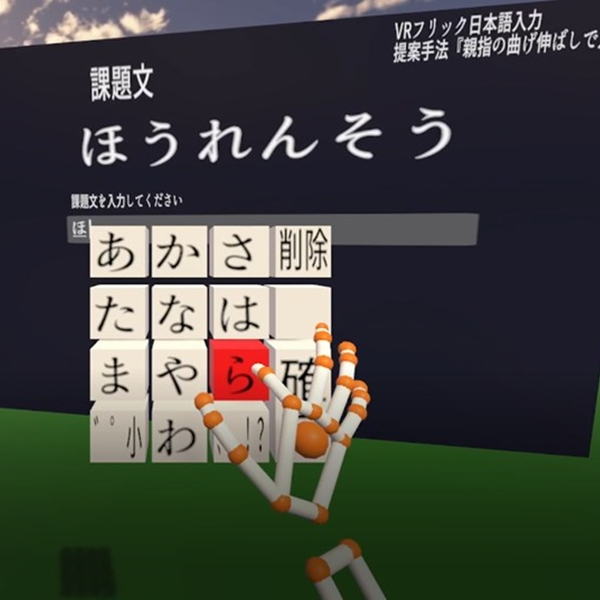
- VRにおけるハンドトラッキングを用いた日本語入力手法の検討
〇大石 真佐貴(東北学院大学大学院)、物部 寛太郎(東北学院大学) - 近年,OculusQuest2 のようにハンドトラッキング機能を搭載するものや,LeapMotion などのハンドトラッキングセンサーによって,VR 空間に自分の手を表示する手法が確立してきている.しかし,現在VRにおいてのハンドトラッキングを用いた文字入力手法の速度や精度は高くない.そこで,本研究では仮想キーボードを入力する際,接触判定だけではなく,指を曲げる動作を組み合わせることで, 手の疲労を軽減することや,速度や精度の向上を目指す.
- 2C1-3
- 全景提示により見逃しの不安を緩和する360°動画視聴インタフェース
〇山口 昌馬(東京大学)、小川 奈美(東京大学、DMM.com)、鳴海 拓志(東京大学) - 360°動画視聴時には,何かを見逃しているのではという不安(Fear of Missing Out, FOMO)が生じる.この不安を低減させるため,本研究ではHMDを用いて360°動画を視聴する際に手元に動画の全景を提示する手法を提案する.通常の視聴と比較した結果,提案手法によりFOMOを低減できることがわかった.また,一部の動画について視聴体験の質が向上し,条件間でプレゼンスに有意差は見られなかった.

- 2C1-4
- 会話エージェントにおける視線とフィラーを組み合わせた非言語的な質問認識開始手法の研究
〇郭 正雄(東京大学)、葛岡 英明(東京大学)、吉田 成朗(東京大学)、川口 一画(筑波大学)、鳴海 拓志(東京大学)、雨宮 智浩(東京大学) - スマートスピーカのような音声操作型の会話エージェントは、特定の単語(ウェイクワード)を最初に言うことで質問の認識を開始する。一方で、この方法では対話の構造が不自然になることや,エージェントの数だけウェイクワードが必要になるといった問題が考えられる。本研究では、視線や会話の間に挟む音声表現であるフィラーといった非言語的手がかりを組み合わせた自然なウェイク手法を提案し、その有効性を検証した。
- 2C1-5
- 群ロボットの身体化に関する予備検討
中川 雅人(東京大学)、〇柏野 善大(東京大学)、吉田 成朗(東京大学)、稲見 昌彦(東京大学) - 複数の個体群が協調して動作するシステムを、群ロボットシステムと呼ぶ。このようなシステムは高い頑強性・柔軟性・拡張性を備えている。ヒトの身体が群ロボットで構成されればヒトもこれら性質を獲得することができる。本研究ではヒトの身体全て、もしくは一部を群ロボットで代替する「群身体」を提案しコンセプトを検証するプロトタイプの構成、群ロボットの身体化に必要な条件を探る実験の結果を報告する。

- 2C1-6
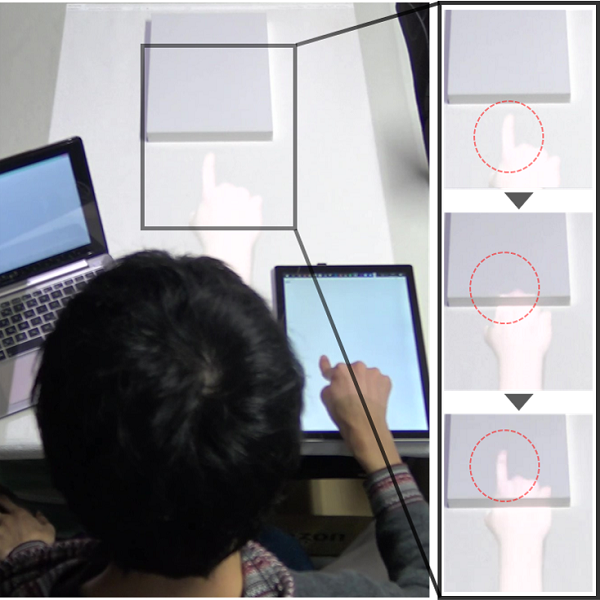
- Leap Motionを用いた既存展示施設の拡張
〇荒屋 成美(富山大学)、辻合 秀一(富山大学) - 現在,公共施設やショッピングモールをはじめ,あらゆる場所で新型コロナウィルス感染症対策が執られている.その過程で,「非接触」というキーワードが注目されるようになった.赤外線センサーを用いた機器が様々な場所で目にするようになる中で,非接触型のセンサー機器が博物館の展示に活用できないかと考えた.本研究では,ガラスケース内のLeap Motionを活用した展示についての考察を踏まえ,これからの展望について発表する.

- 2C1-7
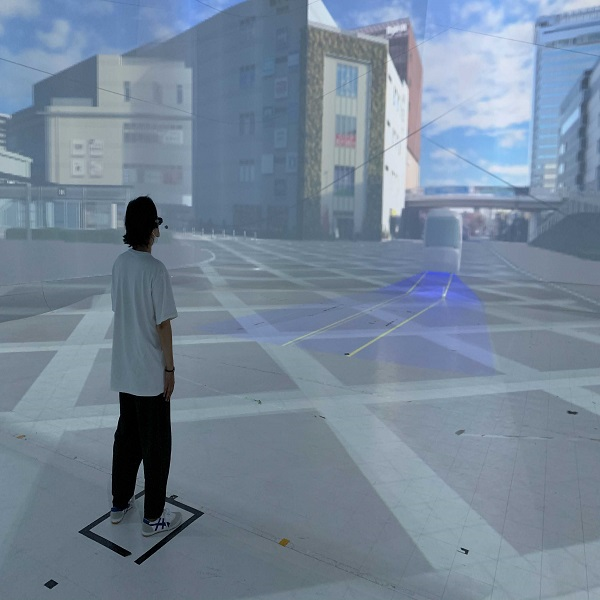
- 歩行者に車両の存在予測範囲を提示するeHMI
〇児玉 拓郎(筑波大学)、矢野 博明(筑波大学) - 歩車混在空間において人や車両の安全快適な移動を支援するための外向けHMI(eHMI)の研究が行われている.我々は,車両空間と歩行者空間を物理的に別々に作成し,バーチャル空間で統合するシステムの構築を行った.この空間を使用して,車両から歩行者に対するeHMIとして,歩行者が車両の進行方向及びその存在確率の高い領域の予測を支援するeHMIを設計し、バーチャルなeHMIとして実装した.対面通行タスクによる評価実験を行い,歩行者の通行動作への有効性を検証した.
- 2C1-8
- サドル型走行デバイスを用いたバーチャルランニングにおけるVR映像の効果
〇坂口 正道(名古屋工業大学)、田山 滉士(名古屋工業大学) - 我々は,サドルに座り体重を免荷しながら実際の走行と同様の動作が可能なサドル型バーチャル走行デバイスを開発した.本デバイスは安全性に優れ,フィットネス,インタフェース,トレーニングなど多様な分野に応用可能である.本発表では,開発したデバイスを用いたバーチャルランニングにおけるVR映像の影響について発表する.

一般発表 9:00-10:20 拡張・複合現実1
- 2D1-1
- RV-XoverKit:エデュテインメント分野でのMRコンテンツ制作に適したツールキット
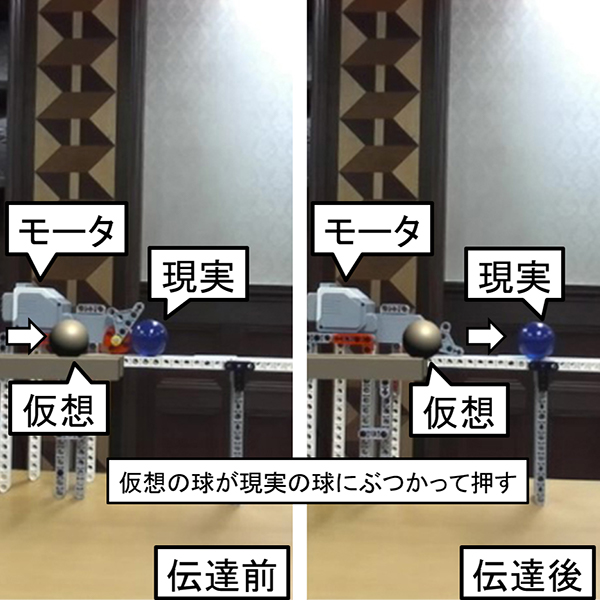
〇敷島 歩(立命館大学大学院)、石田 隼也(立命館大学大学院)、福田 裕美(立命館大学)、木村 朝子(立命館大学)、田村 秀行(立命館大学)、柴田 史久(立命館大学) - 先にMRコンテンツの表現力を増すために,現実空間と仮想空間の相互間で移動物体の動きを伝達できるRV-TransitionKitを開発した.その発展形として,創造的コンテンツ制作を支援するRV-XoverKitの概念とツール体系を整理し,機能設計に着手した.その第1段階として,LEGO社のマインドストームⓇを活用したRV-MessengerKit Ver.1を開発したので,その実装例を紹介する.
- 2D1-2
- 三代目MRピタゴラ兄妹 with RV-XoverKit ~エデュテインメント作品制作に適したツールの利用例~
〇福田 裕美(立命館大学)、敷島 歩(立命館大学大学院)、石田 隼也(立命館大学大学院)、木村 朝子(立命館大学)、田村 秀行(立命館大学)、柴田 史久(立命館大学) - 複合現実感(MR)の導入により,エデュテインメント作品を独創性に富んだものすることが期待できる.筆者らは,現実空間・仮想空間の相互遷移や両空間でトリガーをかけ合う機能を実現するツールキットRV-XoverKitの提供により,作品制作者の創造力を発揮しやすくすることを目指している.その利用事例として,現実空間と仮想空間を往き来する体験型デモ作品を制作したので,その動作の模様を技術展示する.

- 2D1-3
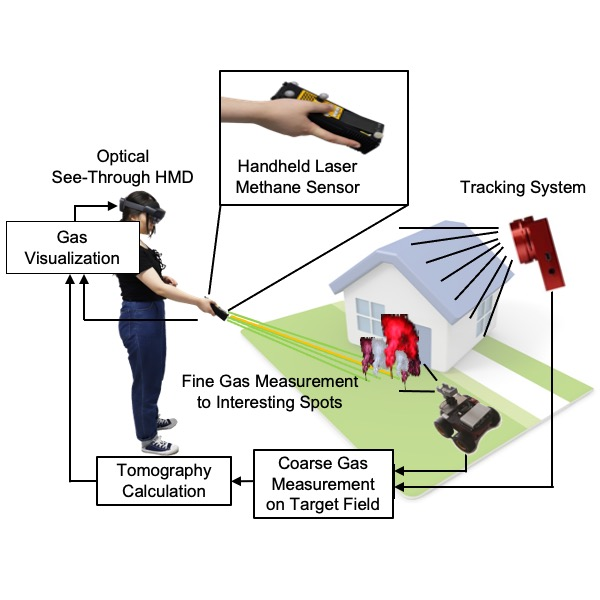
- Superimposing methane gas visualization over a real environment using optical see-through augmented reality
〇Duan Liyuan(大阪大学)、松倉 悠(電気通信大学)、プンポンサノン パリンヤ(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - An augmented reality system with Microsoft HoloLens for visualization of methane gas distribution overlaying real environments is proposed. Gas distribution is calculated with readings of a laser methane gas detector. Results of preliminary experiments will be shown in the presentation.
- 2D1-4
- ⻭科インプラント治療におけるAR式サージカルガイドの開発 -マーカの認識精度を向上させる環境の調査-
〇安黒 翔(東京理科大学大学院 工学研究科 情報工学専攻)、加納 徹(東京理科大学 工学部 情報工学科)、竹林 晃(医療工学研究所)、赤倉 貴子(東京理科大学 工学部 情報工学科)
- 2D1-5
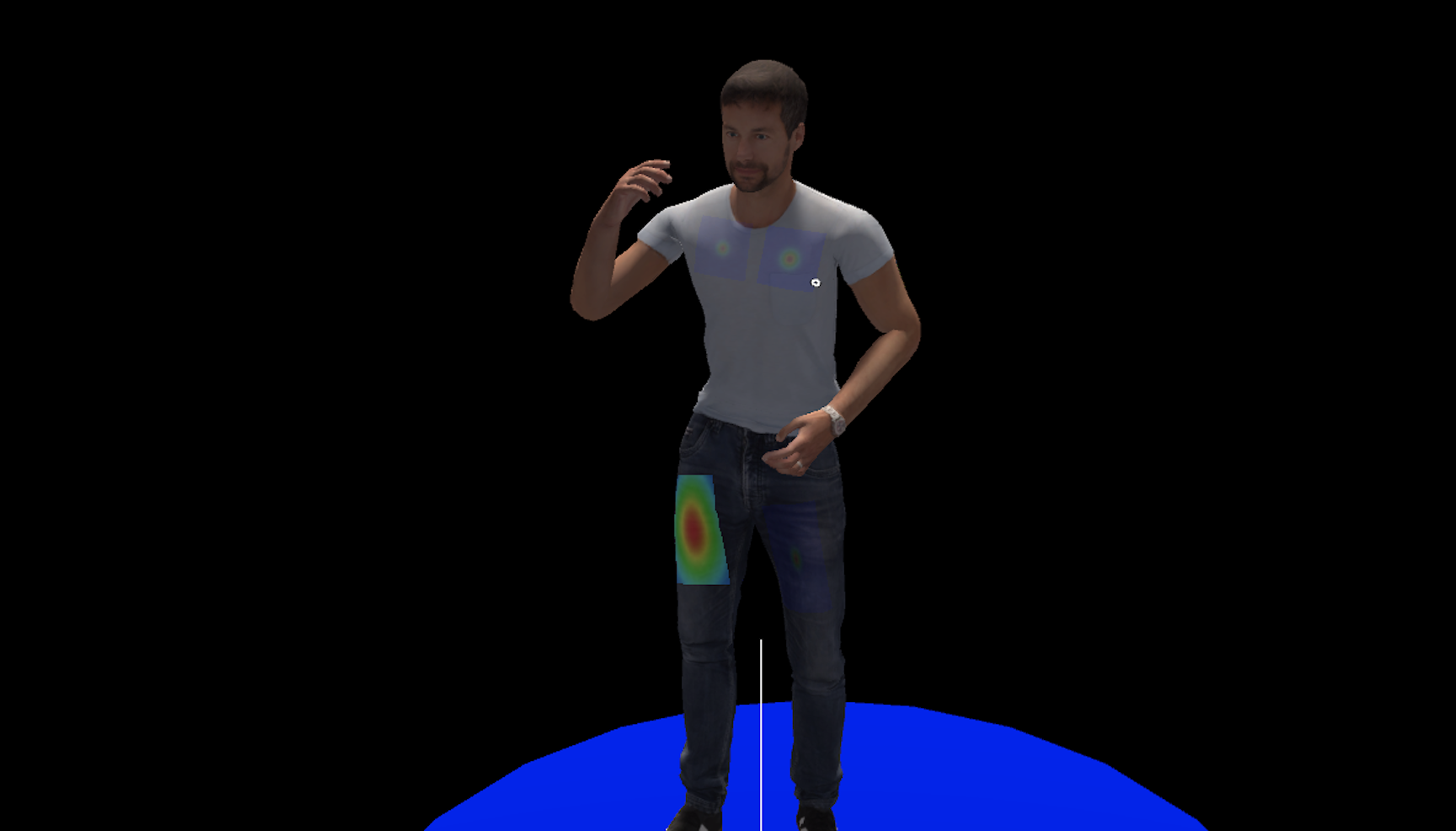
- HoloLense2を用いたアバターへの筋電情報重畳表示
〇山﨑 駆(九州工業大学)、鴻上 図南(九州工業大学)、飯田 稜悟(九州工業大学)、柴田 智広(九州工業大学) - VRやAR,MRの利用により,3次元情報の可視化や現実世界への情報付加を行うことができるようになった.これらは,エンターテイメントや医療をはじめとして多く活用されている.本研究では,複合現実デバイスを用いた筋電情報重畳表示システムを開発し,ポップダンスの計測データを利用してシステムの動作を確認した.本論文では,提案する筋電情報のマッピング方法について述べ,マッピング方法の課題について議論する.
- 2D1-6
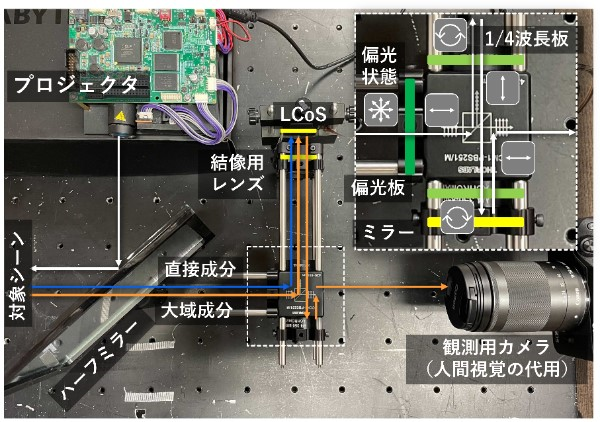
- 光学シースルー型大域反射成分観察スコープにおける投影パタンの検討
〇牧田 整明(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - 照明光の物体表面での反射が、その物体の見えを決定する。反射光を、一次反射である直接反射成分と、それ以外の表面下散乱等の大域反射成分に分離することは、物体の質感の解析に有用であることが知られている。本研究では、高周波パタン投影と反射型液晶パネルを用いた空間遮蔽を組み合わせることで、大域反射成分のみを選択的に肉眼で観察できる光学シースルー型デバイスを構築し、投影パタンに応じた分離性能を調査した。
一般発表 9:00-10:20 触力覚(応用)
- 2E1-1
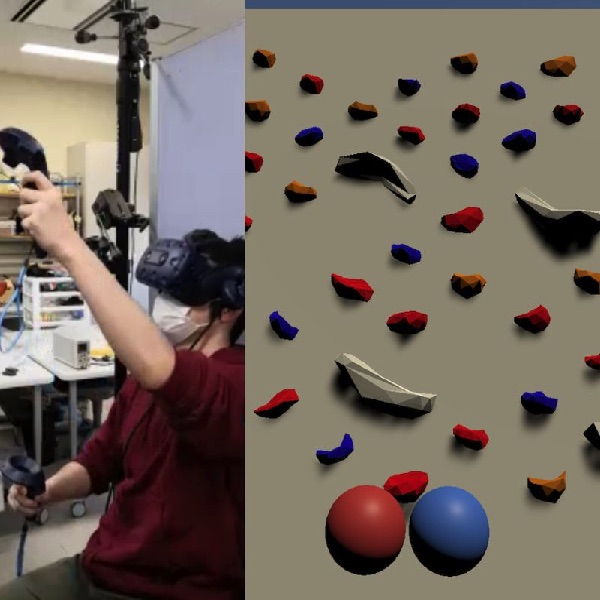
- 力覚を提示するVRボルダリングシステムの開発
〇戸田 貴仁(立命館大学)、臼井 裕貴(立命館大学)、満田 隆(立命館大学) - 突起を掴んで登る力覚が得られるVRボルダリングシステムを開発した。実際の手の動きよりVR空間上の手の動きを遅く表示して力覚を提示する手法と、手首を空気圧カフで圧迫して力覚を提示する手法を比較した結果、重量感覚、突起を掴んだ感覚、登攀感覚のいずれも、2つの手法を同時に用いた場合が、それぞれの手法を単独で用いたときよりも高く評価された。
- 2E1-2
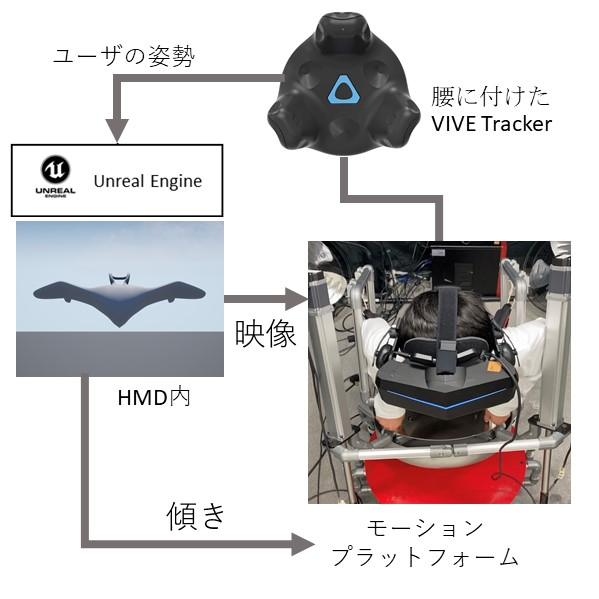
- 体幹トレーニングのためのインタラクティブに揺動可能な飛行システム
〇福山 陸(広島市立大学)、脇田 航(広島市立大学) - 近年,VRトレーニングシステムに関する研究開発がいくつか行われているが,モーションプラットフォームを用いてユーザの体の動きに応じてインタラクティブに操作可能なものはあまり例がない.そこで本研究では,モーションプラットフォームによるインタラクティブな体幹トレーニングを実現するため,VR空間内の環境変化および体験者の荷重移動操作によって慣性力等の外力や機体の傾きを呈示可能な飛行システムを構築した.
- 2E1-3
- 確率共鳴効果を用いた肌触感の感度向上に関する研究
〇今野 萌音(東京大学大学院)、吉田 成朗(東京大学)、雨宮 智浩(東京大学)、鳴海 拓志(東京大学) - スキンケアによる肌改善効果はスキンケアを長期的に行わないと実感しにくい。よって日々のスキンケアで肌状態の変化を実感することは難しく、スキンケアを継続して行うモチベーションが保たれにくい恐れがある。本研究では肌状態の微細な変化を感じやすくするために、肌触感の感度を向上させる手法を提案する。手に振動を加えることで指先の感度を向上させられる確率共鳴効果に着目し、この効果が肌触感の感度向上に貢献するか調査した。

- 2E1-4
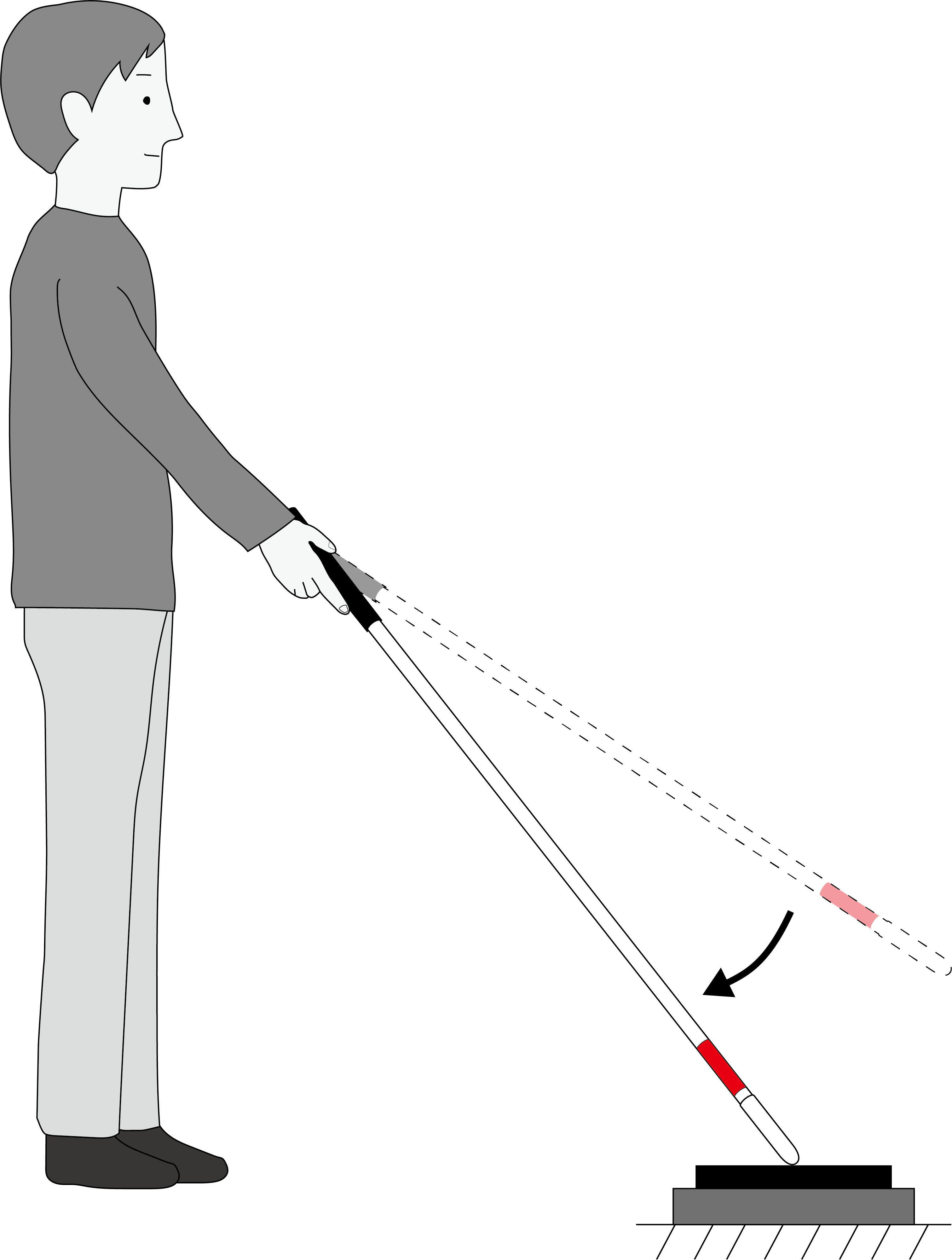
- 白杖を用いた間接的なタッピングによって発生する振動・打撃音・反力と硬さ知覚の関係
〇田辺 健(国立研究開発法人産業技術総合研究所)、布川 清彦(東京国際大学)、土井 幸輝(国立特別支援教育総合研究)、井野 秀一(国立研究開発法人産業技術総合研究所、大阪大学) - 白杖は視覚障害者が単独で移動する際に最も広く利用される補助具であり,白杖の主な役割の一つに情報の収集が挙げられる.本研究では,現状の白杖が伝える情報を明らかにするために,視覚障害者が白杖を介して判断した対象物の主観的な硬さと白杖と対象物が接触することで発生する振動・打撃音・反力との関係を多変量解析によって明らかにした.解析の結果,振動よりも打撃音と反力が硬さ知覚への寄与が大きいことが示された.
- 2E1-5
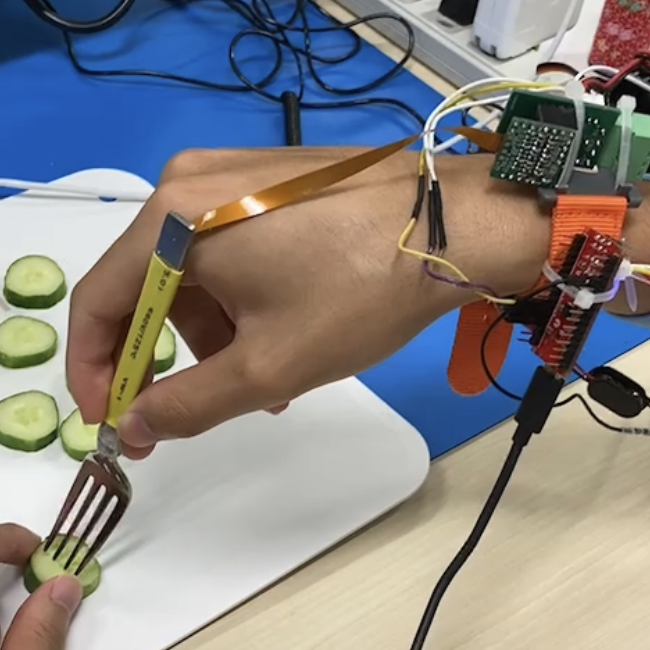
- MEMS触覚センサを用いたフォークによる食材刺突時の把持力に基づく食材判別
〇坪倉 奏太(立命館大学)、柴田 結衣(立命館大学)、安藤 潤人(立命館大学)、寒川 雅之(新潟大学)、渡邊 淳司(NTTコミュニケーション科学基礎研究所)、野間 春生(立命館大学) - 我々が開発している圧力と剪断力を計測できる超小形MEMS触覚センサは道具と手の間に作用する力の計測が可能である。本研究では触覚センサをフォークの柄の裏に取り付け,食材刺突時において中指がフォークに及ぼす把持力を計測した.その計測結果をもとに刺突した食材の判別を,サポートベクターマシンやディープラーニングなど様々な機械学習方式を用いて実施し,それらのモデルの違いによる判別精度の比較検討を行なった.
- 2E1-6
- 複数人の触覚共有に向けた同時知覚可能人数の調査
〇北道 広大(名古屋工業大学)、柴﨑 美奈(慶應義塾大学)、湯川 光(名古屋工業大学)、南澤 孝太(慶應義塾大学)、田中 由浩(名古屋工業大学) - 触覚伝送技術の発展により、人―人間で触覚共有が可能になりつつある。複数人の触覚を一度に感じられれば、遠隔地を始め広い範囲の対象知覚や同時の比較が可能になり、複数人による感覚の時空間的拡張が期待できる。本研究では、指先の触覚情報を取得して他者の上腕に提示を行い、複数人の振動触覚を共有するシステムを構築した。基礎検討として、運動を伴わない触知覚を対象に、共有人数と知覚性能との関係を検討する。

研究委員会OS 13:00-14:20 アート・エンタテインメントをアウトプットする ー論文・作品への展開事例ー
- 2A2
- アート・エンタテインメントをアウトプットする ー論文・作品への展開事例ー
〇山岡 潤一(慶應義塾大学)、吉田 成朗(東京大学)、阪口 紗季(東京都立大学)、土田 修平(神戸大学)、村松 充(東京大学)、河野 通就(バンダイナムコ研究所) - メディアアートやエンタテインメントコンテンツの普及に伴い、それらを学術的な研究として扱う事例が増えている。本セッションでは、これまで学術分野として扱うことが多くなかったこれらの領域を、どのように研究として成り立たせ、論文として纏めるかについて、A+E研究委員会のメンバーを中心に、過去の事例を紹介しながら理解を深める。さらに研究をアート作品として展開する取り組みについても紹介する。

一般発表 13:00-14:20 医療&QOL
- 2B2-1
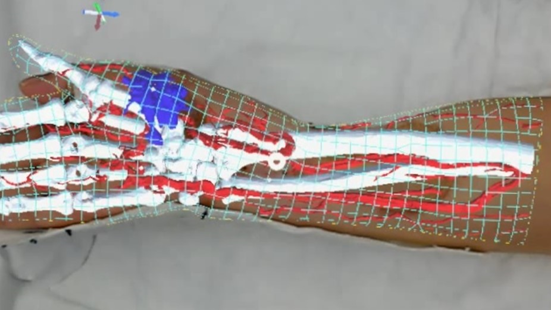
- 深部臓器AR表示における体表メッシュ表示の有用性
〇光野 乃祐(大阪医科薬科大学形成外科)、上田 晃一(大阪医科薬科大学形成外科)、片山 美里(大阪医科薬科大学形成外科)、廣田 友香(大阪医科薬科大学形成外科)、塗 隆志(大阪医科薬科大学形成外科) - 医療分野ではAR技術を用いて深部臓器データを体表に投影する試みが盛んに報告されているが、深部にある臓器が体表に重なって表示されるため、奥行き認識のずれがしばしば問題となる。解決法として窓開け法等が既に報告されているが、我々は体表データをワイヤーフレームで同時表示する手法で対応している。ワイヤーフレームが体表に正確に重なっている事が深部データ表示位置の正確性の担保にもなり有用と考える。
- 2B2-2
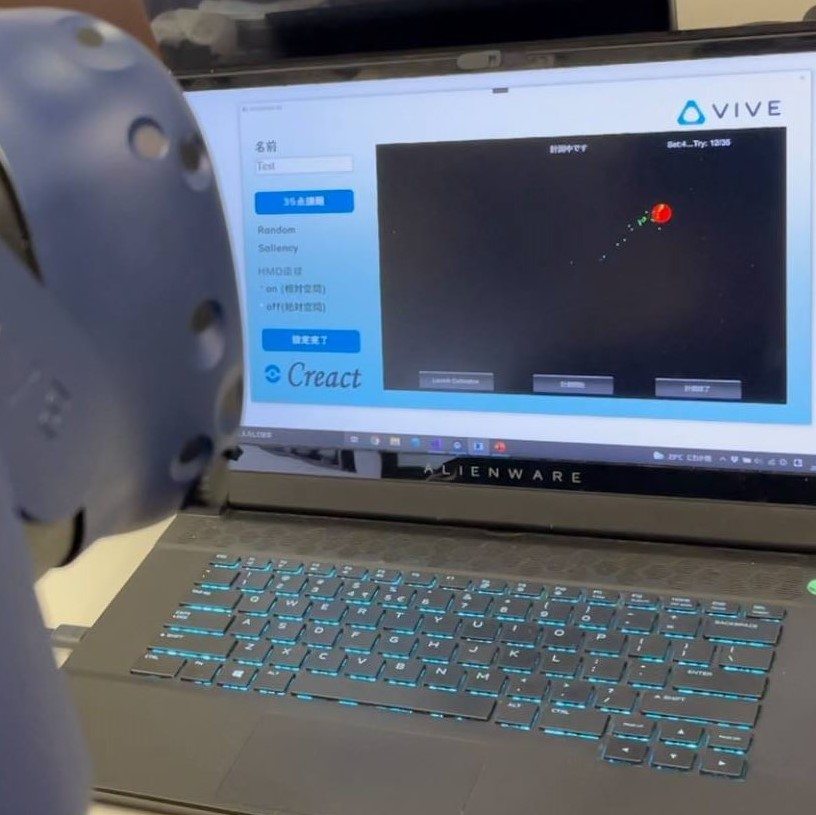
- アイトラッカー搭載型HMDを活用した脳損傷後の視空間性情報処理機能評価
〇大橋 勇哉(芝浦工業大学、国立障害者リハビリテーションセンター研究所)、山本 紳一郎(芝浦工業大学)、河島 則天(国立障害者リハビリテーションセンター研究所) - 交通事故や脳卒中などの脳損傷は見えに関する様々な障害を引き起こす.これらの障害は,僅かな損傷領域の差で症状の特性が異なるため,患者ごとに正確な評価が求められる.特に半側空間無視では,視線と頭部の偏向・代償戦略のそれぞれ独立した評価は非常に高い意義をもつ.本発表では開発したアイトラッカー搭載型HMDを活用した評価システムの概要と半側空間無視患者を対象とした計測結果について述べる.
- 2B2-3
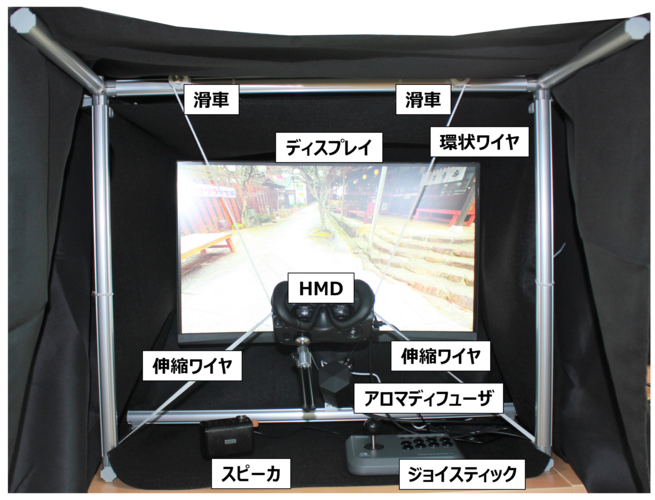
- 認知症高齢者向け二線吊式VR体験装置のマルチモーダル化による没入感向上
〇松井 尚樹(大阪大学大学院基礎工学研究科)、岩井 大輔(大阪大学大学院基礎工学研究科)、仁木 一順(大阪大学大学院薬学研究科)、佐藤 宏介(大阪大学大学院基礎工学研究科) - 現在、認知症治療薬は有効性が低く認知機能低下を抑制しうる非薬物療法の開発が求められている。また、コロナ禍による施設療養者の面会制限に伴うメンタルケアの需要も高まっている。本研究では認知機能低下抑制やメンタルケアに有用なVRシステムの開発を行った。また、VRコンテンツとして昔懐かしい3Dモデルと癒しの動画の2種類を用意し、各シーンに応じた音や香りを放出する機構を導入することで癒し効果の向上を図った。
- 2B2-4
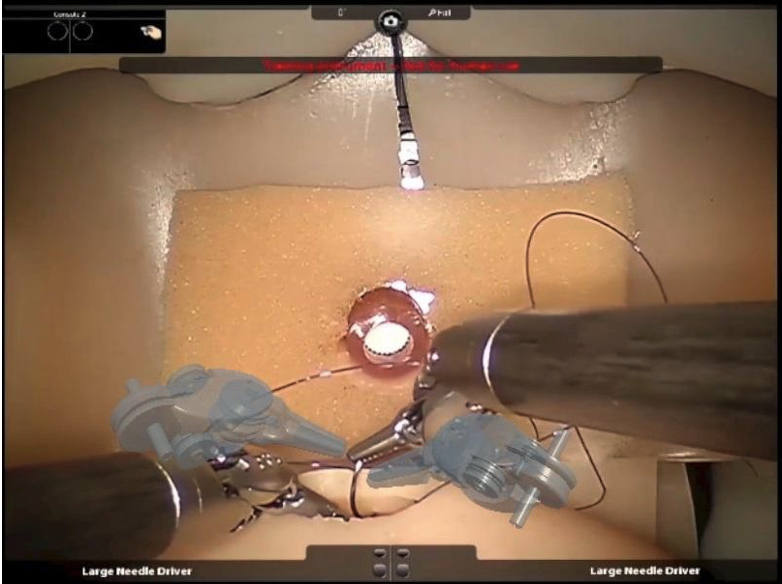
- スタンドアロン型HMDを用いたロボット支援手術の追体験教材
〇安藤 英由樹(大阪芸術大学)、宮尻 拓(株式会社計数技研)、早石 直広(株式会社計数技研) - 近年ロボット支援手術の保険適応範囲が拡大され,ニーズが高まっており,熟練者の育成が大きな課題となっている.しかしながら,トレーニングは実際のマスターコンソールを用いるか,高価なシミュレータを導入することが一般的で,腹腔鏡手術のドライボックスといった安価なトレーニング方法が確立されていない.そこで本研究では安価なスタンドアロン型HMDを用いたロボット支援手術の追体験教材について開発を行った.
- 2B2-5
- 低侵襲手術における文字または音声呈示を用いた視覚的注意の誘導
〇久山 愛翔(愛知工科大学)、田川 和義(愛知工科大学)、山本 雅也(愛知工科大学)、田中 弘美(立命館大学)
- 2B2-6
- VRを用いた高齢者の自律神経活動調整のための基礎的検討:ベースラインを統制した若年健常者での検証実験
〇嶋 彩花(東京大学)、濵田 佳歩(東京大学)、中村 美緒(東京大学)、登嶋 健太(東京大学)、檜山 敦(東京大学)、二瓶 美里(東京大学) - 体内の機能を整える自律神経系は,加齢に伴い交感神経と副交感神経のバランスが崩れやすくなり,心身に症状が発生する.本研究ではその治療法として薬物ではなく非侵襲的なVR空間の体験を考え,VR空間が自律神経系に与える影響を定量的に明らかにする.本報告では若年者に対して実施したベースラインを統制し,異なる性質の映像コンテンツを提示した際の交感神経活動への影響について述べる.

- 2B2-7
- AR/VR 看護シミュレータのための馴染みや自然さを考慮した患者モデルの構成方法
〇木村 仁(北海道大学大学院情報科学院)、小水内 俊介(北海道大学大学院情報科学院) - 看護シミュレータにおいて患者の模擬は体験者の意識に影響を及ぼし体験後のアンケートにおいて頻出の項目となる.人間の3DCGモデルは模型に比べて入手性が良く,AR/VR系シミュレータ開発のハードルを下げうるが,馴染みのない顔立ちや微動だにしない振舞いは少なからず体験のストレスとなる.本論文では,性別・年齢・体格を柔軟に設定可能な身体と,実写ベースで馴染みのある顔を結合し,身体の微動により不自然さの提言を企図した患者モデルの構成方法について説明する.

- 2B2-8
- Designing a Visualization based on Emotion Log with Multiple Aspects of Life Quality
〇金 庭潤(東京大学)、楊 期蘭(東京大学)、竹内 俊貴(東京大学)、鳴海 拓志(東京大学) - This study proposes a new visualization design that reflects multiple life aspects, by visualizing users’ perceived happiness and stress levels of their daily activities. With the proposed visualization, we expect individuals to develop self-awareness and quality of life.

一般発表 13:00-14:20 計測・認識
- 2C2-1
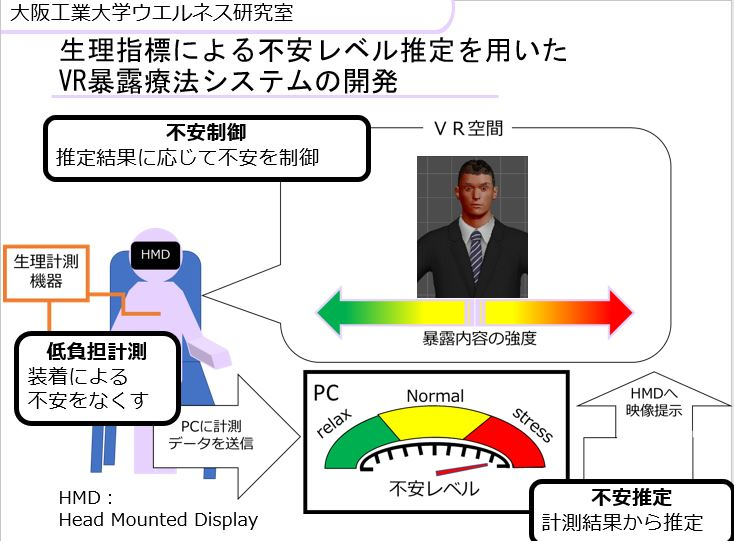
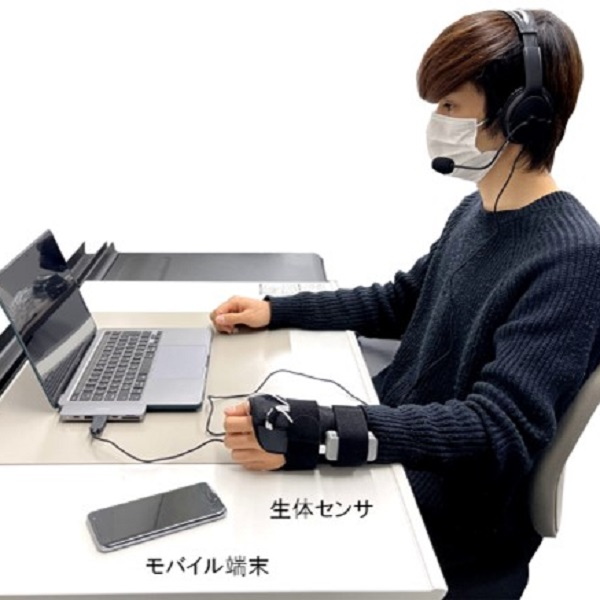
- 生理指標による不安レベル推定を用いたVR暴露療法システムの開発
〇木場 晏也(大阪工業大学院)、大須賀 美恵子(大阪工業大学院) - 社交不安症の治療法としてVirtual Reality(VR)を用いた暴露療法がある.治療者が患者の暴露体験(VRコンテンツ)を共有し,制御できることがVR導入の利点である.我々は,生理指標を用いて推定した不安レベルに応じてコンテンツを変更するVR暴露療法システムを提案し,プロトタイプを開発した.本報では,これを用いて模擬面接実験を行い,実験参加者の不安レベル制御の可能性を検討した結果を報告する.
- 2C2-2
- 発表辞退
- 2C2-3
- 生体電気インピーダンスを用いた手指状態推定システムの開発 ー計測サブシステムの検討ー
〇星野 篤(東京工科大学)、高橋 秀智(東京工科大学) - 3D空間上に手指の姿勢情報を入力できるデータグローブに変わる、手指状態計測システムの開発を目指す。開発するシステムは生体電気インピーダンスを用いて手指の腱の状態から推定する。手指の関節角度とインピーダンス値の相関関係が複雑化するため深層学習を用いて推定を行う。深層学習の入力をインピーダンス値、教示データを計測サブシステムで計測した関節角度を用いる。計測サブシステムではLeap Motionを用いた測定を行い、カメラを用いた画像解析およびMediaPipeで得た3次元座標を用いた補正を行う。本研究ではLeap Motion、画像解析、MediaPipeによる測定の評価を行い、サブシステムの開発の検討を行う。
- 2C2-4
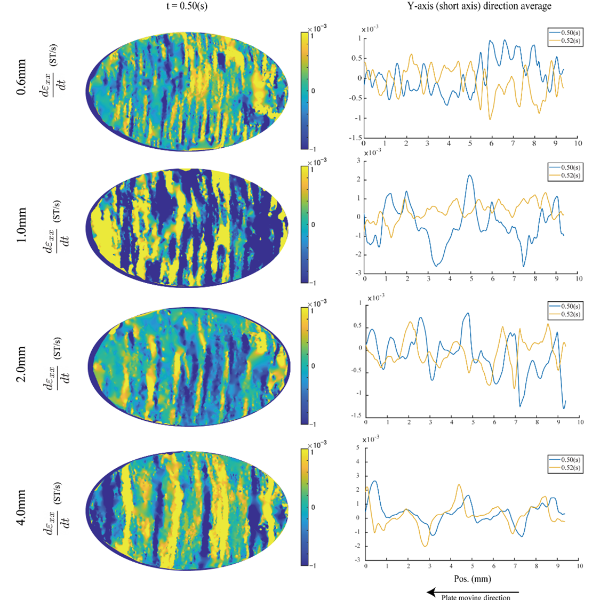
- 一次元凹凸面なぞり時の時空間皮膚ひずみの計測
〇金子 征太郎(電気通信大学、日本学術振興会)、梶本 裕之(電気通信大学) - 触覚ディスプレイ上における高品質な触感提示には実物をなぞった際の指腹の時空間的な変化から提示信号を生成することが重要である.本研究では複数の波長を持つ一次元凹凸面をなぞった際の皮膚変形計測を行い,テクスチャの形状変化に依存して変化する皮膚ひずみパターンを解析,抽出する.
- 2C2-5
- BMIのための入力脳波長の異なるCNNのブレンドによる変化に鋭敏な実時間分類
〇太田 貴士(名古屋工業大学)、舟橋 健司(名古屋工業大学) - 脳波で機械を操作するためのインターフェースの研究が多く行われており、ニューラルネットワークを用いた高い精度での認識手法が提案されている。しかし、これらの分類モデルは精度向上のために時間軸方向に入力が長く、入力脳波の変化への反応が遅くてリアルタイム性に乏しい。本研究では、入力信号長の異なる複数のCNNをブレンドすることでリアルタイム性を向上させる手法を提案する。

- 2C2-6
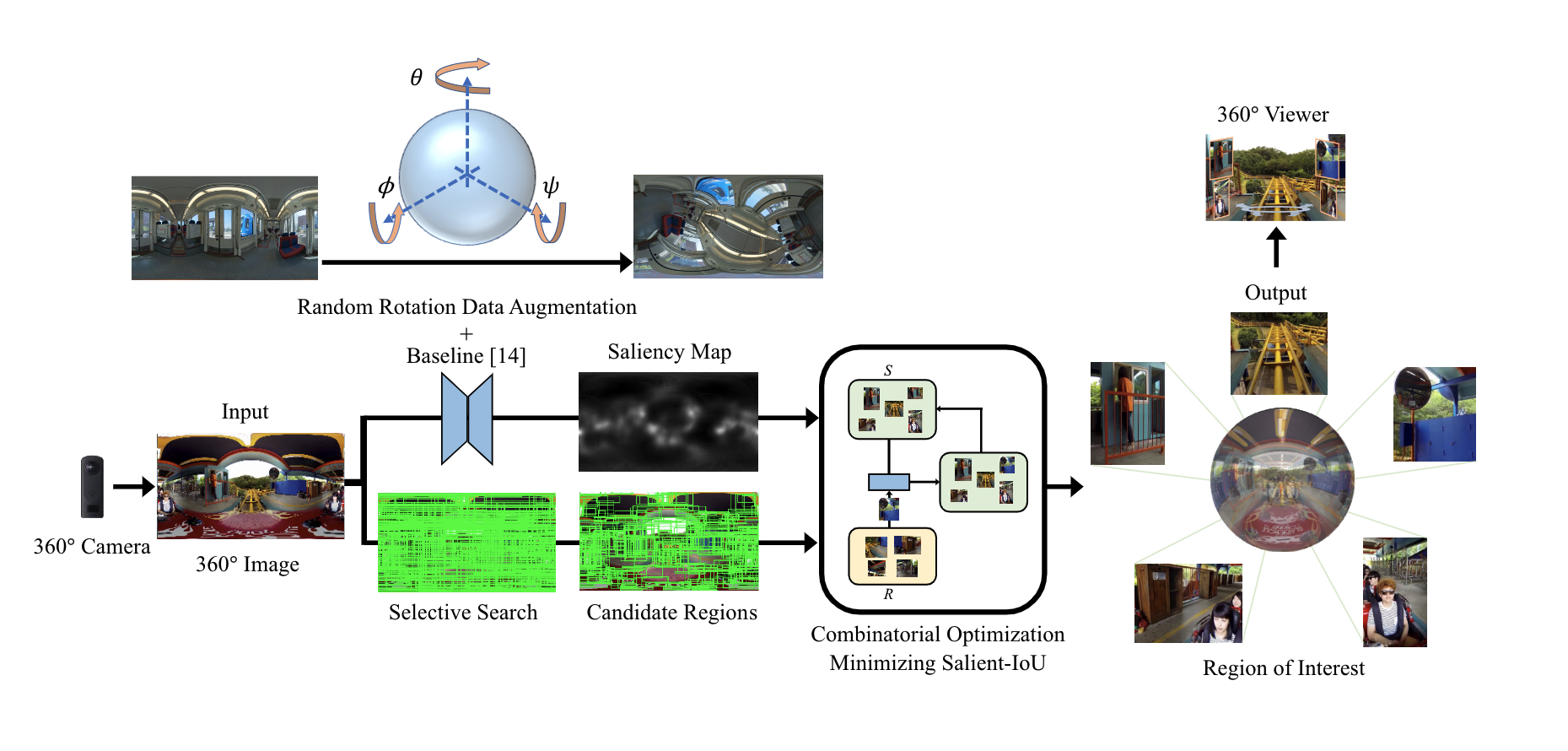
- 360°画像からの注目部分の予測とその評価
〇澤邉 裕紀(東京大学)、池畑 諭(国立情報学研究所)、相澤 清晴(東京大学) - 360°画像は閲覧者の視野角よりも広い情報を持つので,視野外の情報の見落としが発生する.<#%BR%#>そこで本研究では,顕著性マップの予測により,360°画像における最適な注目部分領域(Region of Interest, RoI)の集合を予測する手法を提案する.360°画像ドメインに適したデータ拡張に基づく顕著性予測CNNを学習し,領域内の顕著性と領域同士のIoU (Interaction-Over-Union)に基づいた最適なRoI集合を獲得する.<#%BR%#>提案した手法により得られた注目部分画像をクラウドワーカーによる主観評価によって評価し,提案手法が手動で領域を選択する
- 2C2-7
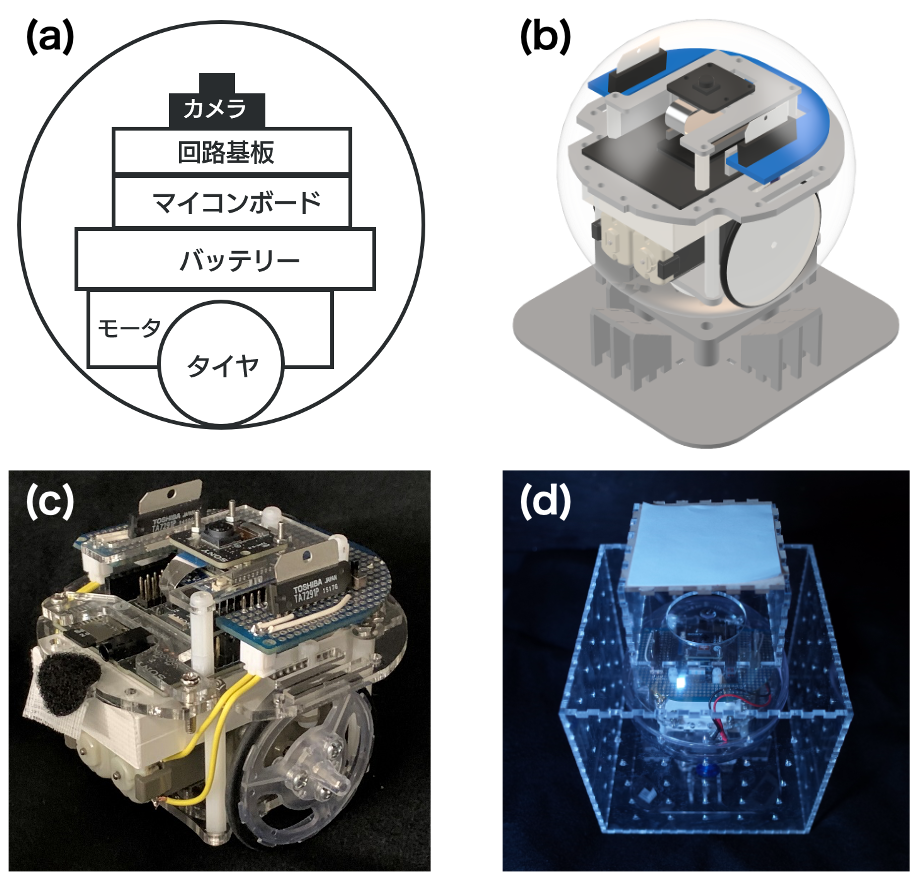
- QuANTAM:球殻外転方式による小型生物用行動計測装置の開発
〇永谷 直久(京都産業大学)、奥田 健嗣(電気通信大学)、岡 凌平(京都産業大学) - 我々は,節足動物を主な対象とした小型生物の行動計測において,これまで着目されてこなかった腹側からの行動観察を可能とする装置の開発を行なっている.本発表では,球殻内に撮像素子およびアクチュエータを配した,球殻外転方式による全方向運動補償機構を有した行動計測装置の試作機の装置構成と,試作機の開発を通して得た改善点を紹介する
一般発表 13:00-14:20 拡張・複合現実2
- 2D2-1
- 投影型拡張手インタラクションにおける視覚効果付与に関する一考察
〇佐藤 優志(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - プロジェクタからユーザの手の代替となる拡張手を投影する拡張現実インタフェースにおいて、投影拡張手が実物体に触れた際に拡張手の手指を揺らす等の視覚効果を付与することで疑似触覚より物体触感を提示する手法がある。これまでに触れる物体の物理的特徴、質感により、付与すべき視覚効果が変化することを確認した。本稿では物体特徴以外にも触れ方などの要因が、付与すべき視覚効果に影響するのか調査した結果を報告する。
- 2D2-2
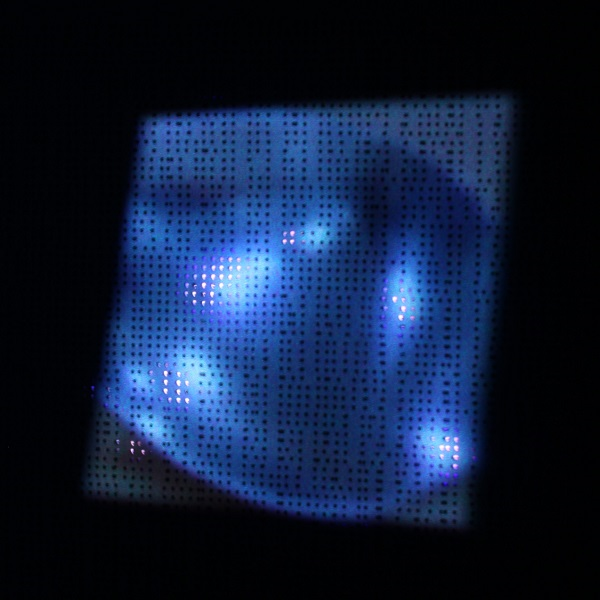
- 前面投影と網膜投影とを重畳呈示する微細孔スクリーン型プロジェクションマッピング
〇金城 和志(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - プロジェクションマッピングにおいて,鏡面ハイライトのような局所的で高輝度な部分を表現するには課題が存在する.<#%BR%#>これに対して本研究では,多数の微細な孔が開いた薄板をスクリーンとして高輝度な網膜投影光を背面から通過させ,前面投影によるプロジェクションマッピングに重畳表示することで光沢感をより表現可能な映像提示システムを提案する.
- 2D2-3
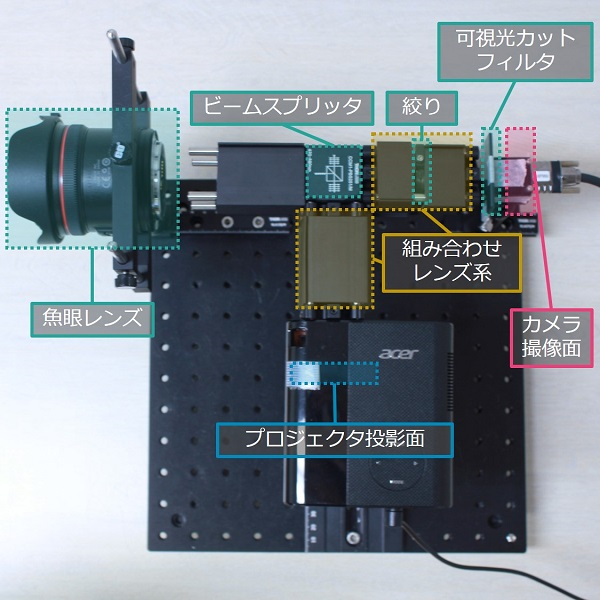
- 単一レンズ型同軸広角プロジェクタ-カメラシステムによる動的プロジェクションマッピングの基礎検討
〇山本 健太(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - 広角投影-撮像により,対象の移動範囲を拡張した動的プロジェクションマッピングが可能となる.広角プロジェクタ-カメラシステムにおいて,従来のキャリブレーションでは投影像の幾何学的位置合わせに必要となる正確な画素対応の取得が困難である.本研究では,投影面と撮像面を光学的に一致させ画素対応が一意となる同軸プロジェクタ-カメラシステムに,単一の魚眼レンズを組み合わせたシステムを提案する.
- 2D2-4
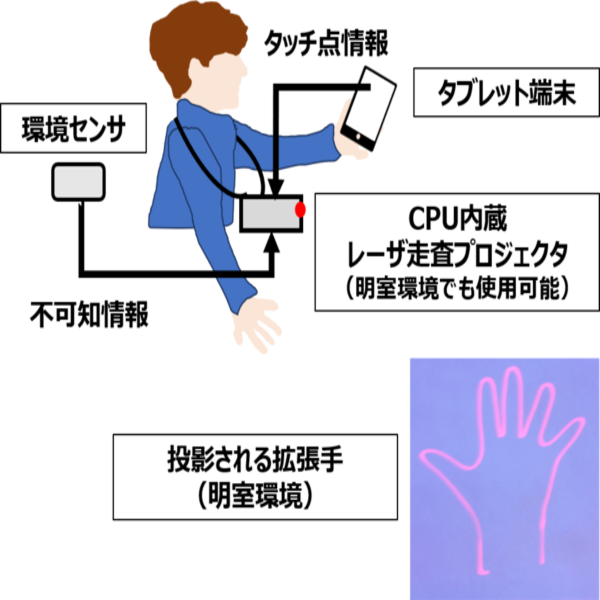
- 装着型拡張手システムを用いた不可知情報の可知化
〇内田 琢也(大阪大学)、渡邊 あきら(大阪大学)、佐藤 優志(大阪大学)、岩井 大輔(大阪大学)、佐藤 宏介(大阪大学) - 本研究では、明室環境含む日常生活場面での使用を想定し、高輝度投影可能なレーザ走査プロジェクタを用いた装着型の拡張手投影システムを用いる。このシステムにユーザにとって不可知な情報をセンシングし、拡張手の動作として反映することでユーザに不可知情報を可知覚化させる手法を提案する。本稿では提案手法を検証するためのシステムの実装を行った.
- 2D2-5
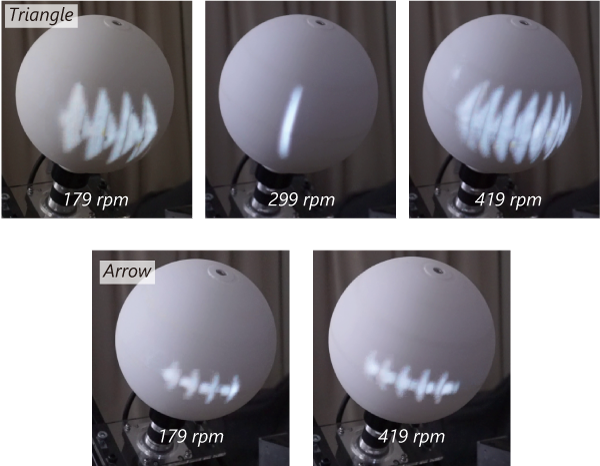
- 球体姿勢に対応した回転相殺テクスチャの高速投影の残像効果による一軸回転可視化法の提案
〇三河 祐梨(東京大学)、末石 智大(東京大学)、石川 正俊(東京大学) - 近年,空間型拡張現実ディスプレイにより運動情報を空間的かつリアルタイムに提示し,人間への直感的なスポーツ教示を試みる研究が活発である.しかし,回転情報のリアルタイム提示にあたって,推定の精度と速度のトレードオフの問題があった.そこで本研究は,回転相殺テクスチャの姿勢変化対応の高速投影の残像効果による,球体の1軸回転の図形的な可視化手法を提案する.実機投影による評価により本提案の妥当性が確認された.
- 2D2-6
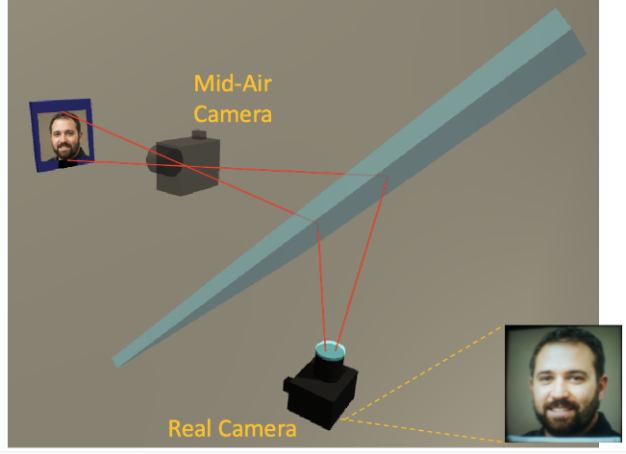
- 各種再帰透過光学系を用いた空中カメラで撮影可能な範囲
〇安藤 将平(電気通信大学)、小泉 直也(電気通信大学) - 再帰透過光学系を用いてカメラ視点位置を光学的に転送し,空中カメラとして扱うことができる.カメラを再帰透過光学系内部で回転し空中カメラを動かす場合,角度が大きくなるにつれて光学素子による迷光やぼけが増加する.本稿では,空中カメラを回転させたときに正常に機能する角度の限界を明らかにする.GANでランダムに生成された顔写真を空中カメラで撮影し,OpenCVによる顔検出が可能な割合によって評価を行なった.
一般発表 13:00-14:20 触力覚(触知覚・非接触)
- 2E2-1
- 柔軟物体から想起されるオノマトペと物性の関連性の予備的検討
〇金田 実久(電気通信大学)、竹内 将大(電気通信大学)、金子 征太郎(電気通信大学、日本学術振興会特別研究員)、梶本 裕之(電気通信大学) - 日本語ではオノマトペを用い,肌の状態や触り心地を表現する.本論文では,オノマトペと柔軟な物体の物性の関連性の明確化を目的とする.12種類のゲルの触り心地をオノマトペで表現し,オノマトペの出現範囲と出現数からオノマトペと物性の関連の考察を行う.また,ゲルを触る条件(視覚・触覚・視触覚条件)で想起されるオノマトペに違いがあるか検証を行う.

- 2E2-2
- 触覚遅延フィードバックによるセルフタッチ錯覚
〇齋藤 五大(東北大学)、樋田 浩一(東京大学) - セルフタッチ錯覚は閉眼の参加者が一方の手で偽の手に触れると同時にもう一方の手を他者に触れられると,自分で自分の手に触れたと感じる錯覚である。本研究の目的は,接触センサーと振動モーターを用いてセルフタッチ錯覚が生起するまで時間窓を調べることであった。実験の結果は,センサーの押下からモーターの振動までの遅延時間が128ミリ秒から378ミリ秒の間でその錯覚の強度が減衰し得ることを示した。

- 2E2-3
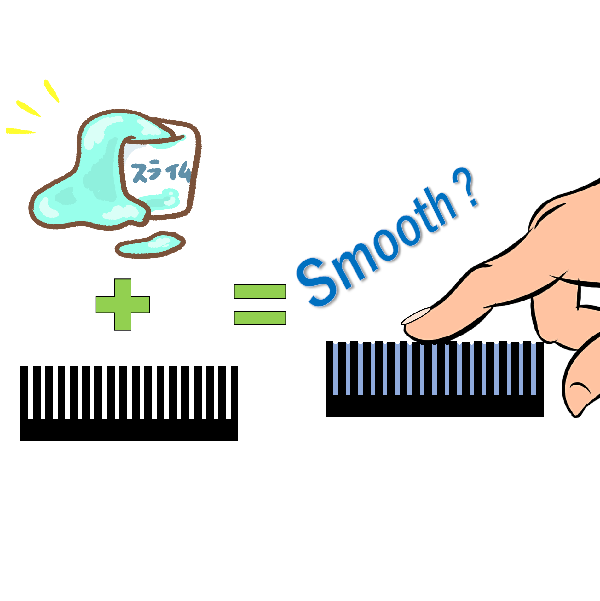
- スライムにピンアレイを刺突することによる表面凹凸の変化が平滑感知覚に与える影響
〇高見 太基(電気通信大学)、齋藤 大雅(電気通信大学 大学院)、亀岡 嵩幸(電気通信大学 大学院)、梶本 裕之(電気通信大学 大学院) - 周期構造をもつ表面は液体や固体などに対して摩擦感や非吸着感などの機能を有することが知られている.我々はスライムにピンアレイを刺突すると表面の凹凸が変化し,平滑感が変化することを発見した.本研究はこの知見に基づき,スライムとピンアレイを用いて平滑感を変調可能なデバイスを開発する.本稿では特にピンの刺突高さの変化によるスライム表面での平滑感の変化について調査した.
- 2E2-4
- Generative Adversarial Network におけるラベル合成の割合変化による生成された触覚情報の変化
〇笠井 惇矢(熊本大学大学院)、石丸 嵩也(熊本大学大学院)、嵯峨 智(熊本大学) - 我々はこれまで既存の触覚情報から Generative Adversarial Network により新規の触覚情報を合成し,中間的な特徴をもつ触覚情報のリアリティを実験を通じて検証してきた.今回はこの手法を用いて,2つの触覚情報のラベル割合をさまざまに変化させた触覚情報を生成し,参照した触覚情報の特徴が生成結果に反映される割合の変化を評価する.
- 2E2-5
- 触覚的アニマシーのための柔軟・薄膜な触覚ディスプレイの基礎検討
〇黒木 帝聡(豊田合成株式会社、慶應義塾大学)、米原 悠二(豊田合成株式会社)、藤原 武史(豊田合成株式会社)、Peiris Roshan(the Rochester Institute of Technology)、南澤 孝太(慶應義塾大学)
- 2E2-6
- 遮蔽された仮想物体への触覚付与による操作性検討
〇和田 莉奈(東京大学 新領域創成科学研究科)、下村 光彦(東京大学 情報理工学系研究科)、水谷 沙耶(東京大学 情報理工学系研究科)、藤原 正浩(東京大学 新領域創成科学研究科)、牧野 泰才(東京大学 新領域創成科学研究科)、篠田 裕之(東京大学 新領域創成科学研究科) - 遮蔽された仮想物体の操作性向上において,触覚フィードバックが有用であることはすでに確認されている.しかしながら,触覚フィードバックが補っている視覚情報の詳細はまだ解明されていない.そこで本稿では,HMDと非接触型触覚デバイスを用いて,触覚フィードバックが遮蔽物体の操作性に与える影響を検証し,触覚情報により補うことができる視覚情報について,厚み情報と呈示位置の観点から検討した.
- 2E2-7
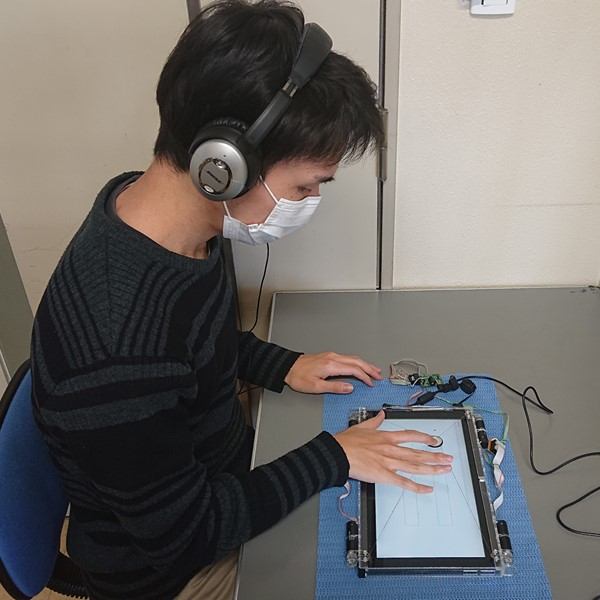
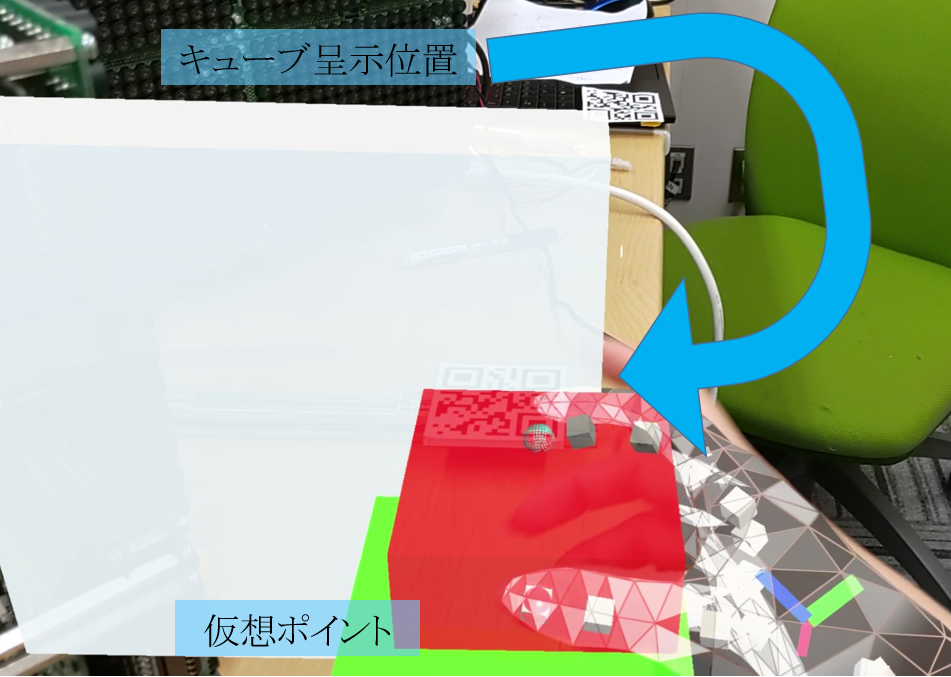
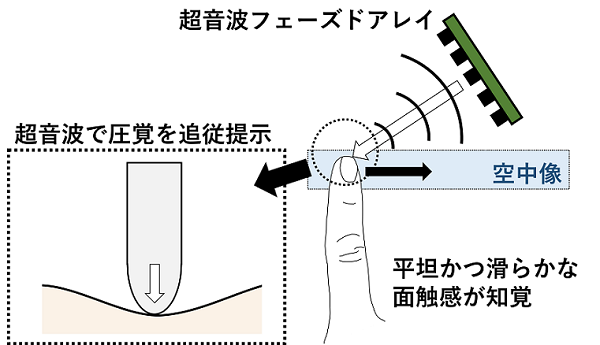
- 集束超音波による圧覚点の指先追従に基づく静的面触感の空中提示
〇森崎 汰雄(東京大学)、藤原 正浩(東京大学)、牧野 泰才(東京大学)、篠田 裕之(東京大学) - 集束超音波は非接触に触覚を提示できる。超音波で物体表面の触感を再現する場合、基本要素として一様で滑らかな(振動のない)静的面の触感が必要となる。静的面で物体との接触感が再現でき、さらに振動を重畳すれば様々な物体の触感再現が実現する。従来の超音波による面提示はいずれも振動を伴う。本研究ではまず超音波の刺激点を細かく周期移動させ圧覚を提示する。その圧覚点を指先に追従させることで静的面の触感を提示する。
研究委員会OS 16:00-17:20 ムーンショットで描くテレイグジスタンスの未来
- 2A3
- ムーンショットで描くテレイグジスタンスの未来
〇南澤 孝太(慶應義塾大学)、鳴海 拓志(東京大学)、笠原 俊一(Sony CSL)、田中 由浩(名古屋工業大学)、サライジ ヤーメン(avatarin)、吉藤 健太朗(OryLab)、赤坂 亮太(大阪大学) - 2020年に開始したムーンショット型研究開発制度では、目標1として「2050年までに、人が身体、脳、空間、時間の制約から解放された社会を実現」することが掲げられ、バーチャルリアリティやテレイグジスタンスによる社会変革に大きな期待が寄せられている。本オーガナイズドセッションでは、VR学会メンバーも多く参加するムーンショット研究プロジェクト「身体的共創を生み出すサイバネティック・アバター技術と社会基盤の開発」(Cybernetic being project)のメンバーが取り組んでいる研究と未来社会に向けた展望を紹介する。
一般発表 16:00-17:20 クロス・マルチモーダル2
- 2B3-1
- 乳児型デバイスを用いた乳児の抱擁感覚再現手法
〇名富 太陽(大阪大学 大学院情報科学研究科)、北畠 康司(大阪大学 大学院医学系研究科)、藤田 和之(東北大学 電気通信研究所)、尾上 孝雄(大阪大学 大学院情報科学研究科)、伊藤 雄一(青山学院大学 理工学部) - 親子の関係構築において,抱擁等の近接インタラクションが重要な役割を果たしている.しかし,新生児集中治療室では,新型コロナウイルスの感染対策のため,親子が自由に接触できない.本研究では,HMDと乳児の構成要素を提示できる乳児型デバイスを組み合わせて,乳児の抱擁感覚を再現する手法を提案する.提示する乳児の構成要素について評価したところ,体温を提示することで,乳児の抱擁感覚を高められることが示された.

- 2B3-2
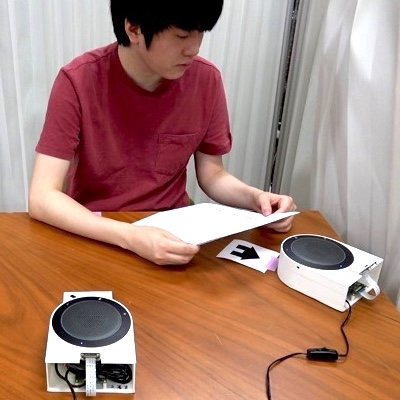
- オンラインでの文化財VR体験におけるマルチモーダル演出の評価
〇青柳 菜々子(早稲田大学 基幹理工学部)、鷲見 輝久(早稲田大学 基幹理工学部)、河合 隆史(早稲田大学 基幹理工学部)、内山 悠一(凸版印刷株式会社 文化事業推進本部)、武 暁桐(凸版印刷株式会社 文化事業推進本部) - 本研究では、マルチモーダル演出が、オンラインでのVR体験にどのような影響を与えるかについて実験的に検討した。具体的には、唐招提寺を題材としたVRコンテンツを用い、マルチモーダル演出としてライブ解説、音響効果、お香を取り入れた。また、各参加者の自宅や職場などリモート環境下で実施した。VR体験時の脈波と心理指標から、演出の有無による体験の違いを考察した。
- 2B3-3
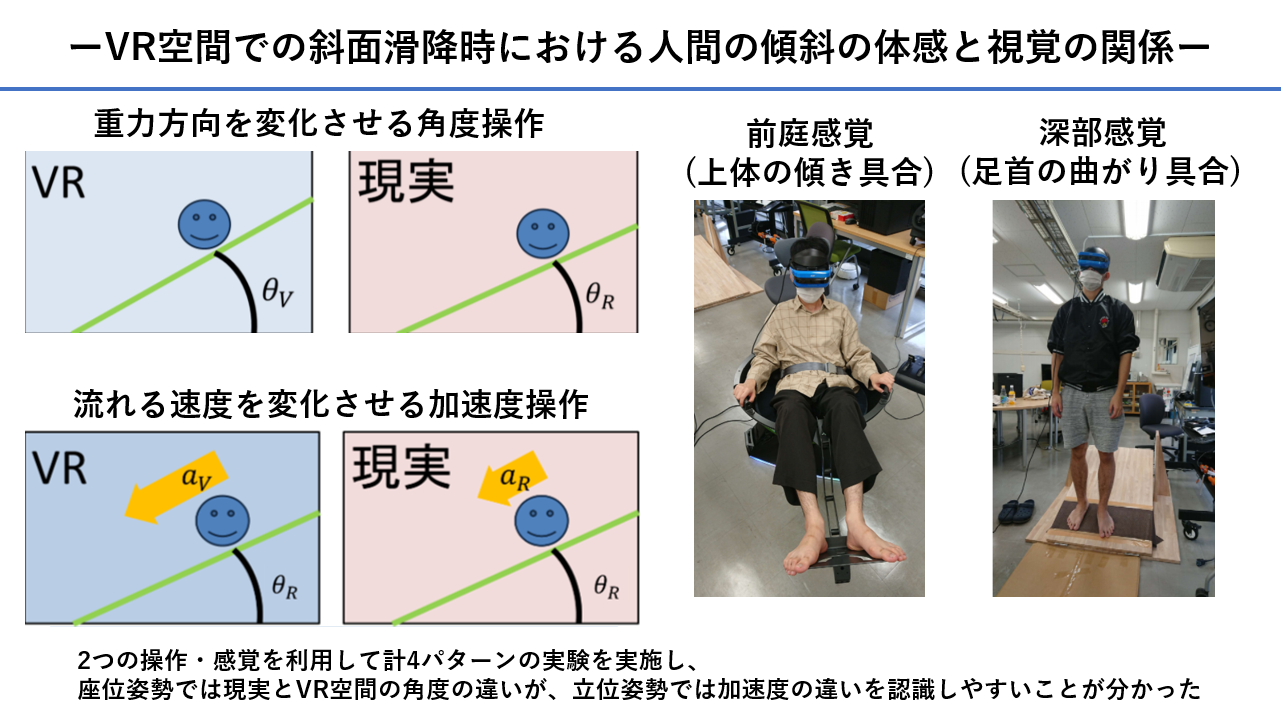
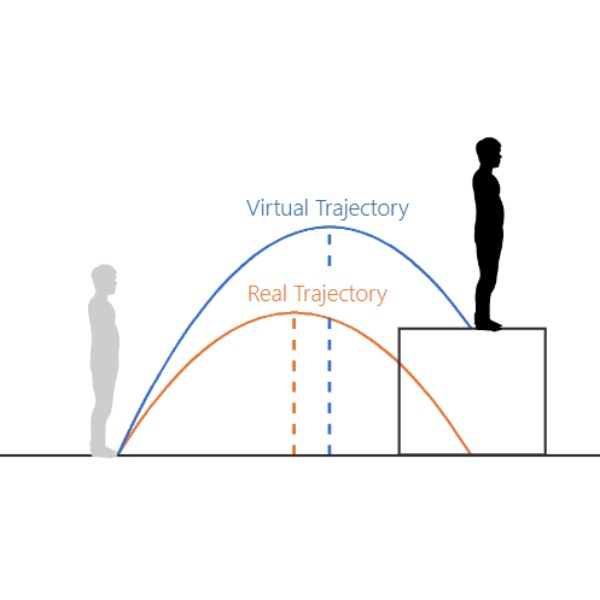
- VR空間での斜面滑降時における人間の傾斜の体感と視覚の関係
〇伊藤 泰輝(成蹊大学)、小方 博之(成蹊大学) - VRにおいて、例えばスキー滑降の加速を体験させる場合、実際の加速をかけることなどに限界がある。そこで本研究ではVR空間内で斜面滑降時に、座位姿勢と立位姿勢での角度操作と加速度操作の計4パターンの影響を、恒常法を用いてユーザに知覚されずにどれだけ操作可能かの閾値を特定した。結果、座位姿勢では実空間の角度とVR空間の角度の違いを認識しやすく、立位姿勢では加速度の違いを認識しやすいことが分かった。
- 2B3-4
- 全天球動画の地面質感を考慮した足裏振動によるバーチャル歩行感覚
〇中村 純也(豊橋技術科学大学)、松田 勇祐(豊橋技術科学大学)、雨宮 智浩(東京大学)、池井 寧(東京大学)、北崎 充晃(豊橋技術科学大学) - 椅子に座った静止観察者に,歩行時のオプティックフローと足裏に振動を提示することで,バーチャル歩行感覚を誘発できる。本研究では,地面の種類に応じた足裏振動の提示が歩行感覚が増強されるか,また,地面の識別が可能であるかを調べた。地面種別との振動適合性を変化させたシステムで実験を行い,地面種別に一致する振動がバーチャル歩行感覚を増強することが明らかになった。また,地面種類の識別も可能であった。

- 2B3-5
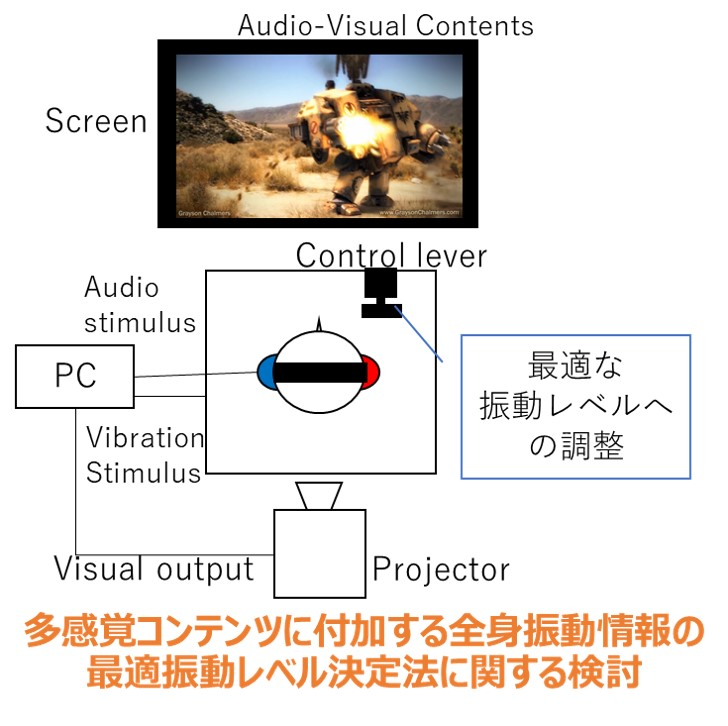
- 多感覚コンテンツに付加する全身振動情報の最適振動レベル決定法に関する検討
〇阿部 翔太(東北大学大学院)、坂本 修一(東北大学大学院)、山高 正烈(愛知工科大学)、鈴木 陽一(東北大学大学院)、行場 次朗(尚絅学院大学) - 視聴覚コンテンツに付加する全身振動を感覚情報から生成する方法が提案されてきたが,どのような振動の大きさが体験者にとって最適かは不明であった.そこで本研究では,体験者自身に音から生成された振動の大きさを最適なものに調整させることで,感覚情報と最適振動量の関係性を検討した.実験の結果,最適振動量と幾つかの音響特徴量との関連が示され,最適な振動の大きさを音響特徴量で決定できることが示唆された.
- 2B3-6
- 音像に対する映像の弁別角度と映像に対する音像の弁別角度の差異
〇河井 薫(芝浦工業大学)、武藤 憲司(芝浦工業大学) - 本研究の目的は音像と映像の位置をずらして提示したとき,それらのずれを知覚する最小の刺激量である弁別閾を測定することである.それにより超現実感技術を利用するときに音像に対して映像を提示できる範囲を把握することができる.本報告では,音像と映像のずれを知覚する弁別角度を測定したときと音像に対して映像をずらしたときと映像に対して音像をずらしたときの弁別角度に生じる差異を報告する.

- 2B3-7
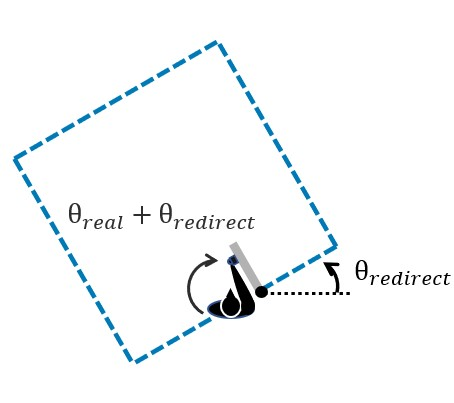
- VRにおける開扉時の視触覚を用いたリダイレクション手法の提案
〇星川 結海(東北大学)、藤田 和之(東北大学)、高嶋 和毅(東北大学)、北村 喜文(東北大学) - 本研究ではVRでの開扉動作に着目し,開扉時のユーザとドアの間の視触覚的な整合性を保ちながら,VR空間内の開扉角度を増減させることにより,開扉後のユーザの進行方向を操作するリダイレクション手法を提案する.この手法により,開扉動作のリアリティを損ねずに,限られた範囲内での進行方向操作を実現できると期待される.本稿では,本手法を実現するためのアルゴリズム及び物理プロップの設計と実装について述べる.
一般発表 16:00-17:20 移動感覚
- 2D3-1
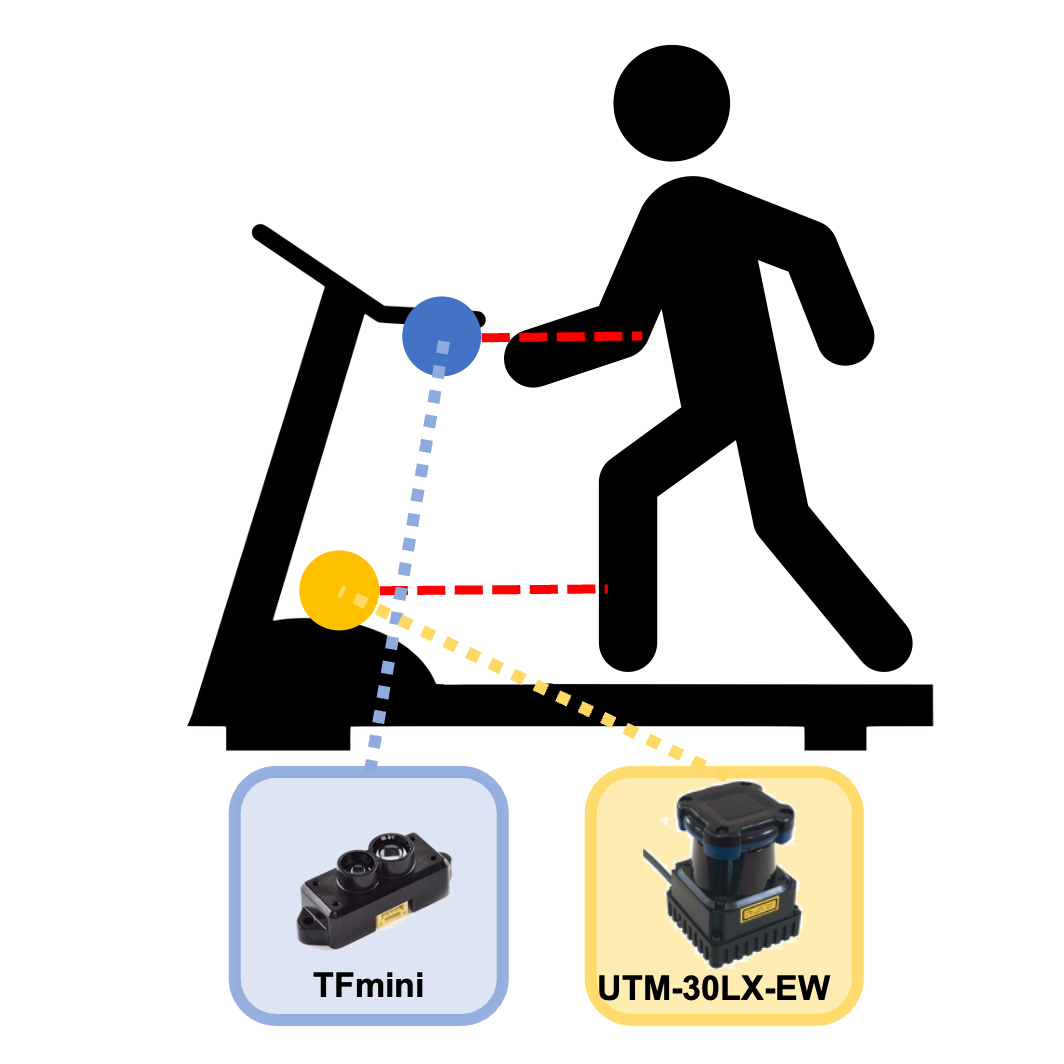
- 機械学習を用いたロコモーションインタフェースの歩行速度推定手法の開発
〇久保村 尚樹(立命館大学)、パウルス デニルセン(立命館大学)、安藤 潤人(立命館大学)、大井 翔(大阪工業大学)、野間 春生(立命館大学) - 我々は人の歩行に合わせて動くトレッドミル型ロコモーションインタフェースの開発をしている.従来は,光学測域センサで取得した足の位置から立脚時間を計測することで歩行速度を推定していたが,歩行動作によっては歩行速度を誤推定する場合があった.本研究では,光学測域センサの計測値から機械学習により推定する手法を検討した.
- 2D3-2
- 簡易没入型VR歩行システムを用いた地面傾斜の知覚評価
〇森崎 慶人(広島市立大学)、脇田 航(広島市立大学) - ボタン操作によるVR空間の移動方法は実際の歩行とは異なり,VR酔いの原因となる.これらの問題を解決するには歩行装置が必要だが,従来,トレッドミル型や足踏み型等,様々な方式が研究開発される中,我々は進行方向に大腿部を支持することで歩行感覚を錯覚させる手法を提案している.しかし,提案装置を用いて傾斜を含む歩行移動の際に,どれ程の臨場感があるかが明確でないため,本研究ではこれらについて主観評価実験を行う.

- 2D3-3
- VRにおける段差への擬似的な跳び乗り感覚提示手法の提案
〇小川 郡平(東北大学)、藤田 和之(東北大学)、高嶋 和毅(東北大学)、北村 喜文(東北大学) - VR空間内を鉛直方向に移動することに関する研究は少なく,特に跳躍動作を用いる手法はあまり検討されていない.本研究では,HMDによる視点操作のみを用いて,平坦な物理空間で擬似的に段差に跳び乗ったような感覚を与える手法を提案する.これを実現するため,跳躍動作中の上昇量と下降量に異なる倍率をかけて差を生み出すゲイン操作手法と,上昇時間が下降時間よりも長くなるように操作するピークずらし手法を設計した.
- 2D3-4
- 鉄道車両の停車時の乗り心地再現シミュレータの小規模化のためのデータ分析
〇濵 圭悟(東京工科大学大学院)、江島 寛人(東京工科大学大学院)、高橋 秀智(東京工科大学大学院) - 鉄道車両の停車時に躓くような衝撃を感じることがある.特に通勤列車は立位姿勢の乗客が多く,姿勢の安定性にも影響を及ぼす.シミュレータを用いれば乗り心地が良いと感じられる程度を調査できるが,鉄道車両の乗り心地を再現するシミュレータは規模の大きなものとなる.小規模なものにできればより手軽に乗り心地の評価を行えると考えた.そこで,実際の車両走行時の6軸挙動計測を行い,分析結果より必要な仕様を明確化する.
- 2D3-5
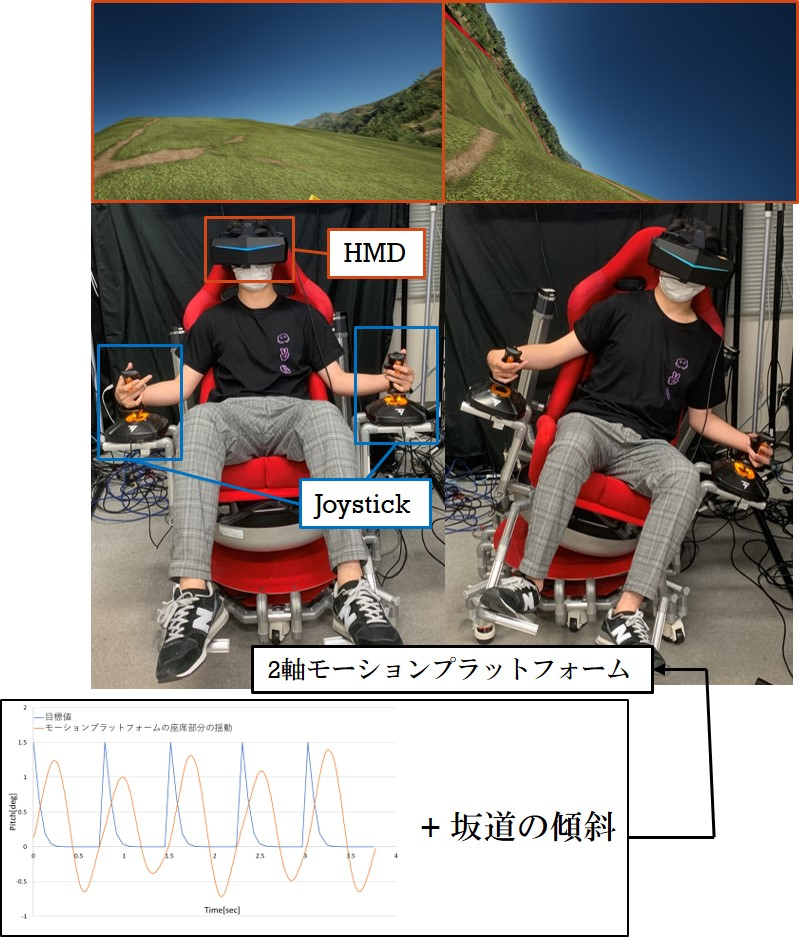
- 自動走行マルチモーダルMRシステムを用いた移動感覚の隠消現実
〇澤邊 太志(奈良先端科学技術大学院大学)、神原 誠之(奈良先端科学技術大学院大学)、藤本 雄一郎(奈良先端科学技術大学院大学)、加藤 博一(奈良先端科学技術大学院大学) - 本研究では,自動走行環境内での視覚や力覚提示が可能なマルチモーダルMRシステムを用いて,走行時の加速度刺激によって搭乗者が感じる移動感覚の隠消現実を行うことを目的とする. VRによる視覚提示とモーションプラットフォームによる力覚提示により, 発生した加速度刺激を打ち消す手法によって, 自動走行酔いを抑制する快適な自動走行環境の実現を目指す.

- 2D3-6
- 球面ディスプレイ搭載電動車いすを用いた加減速における視覚提示情報操作
〇佐藤 賢太朗(筑波大学)、矢野 博明(筑波大学)
- 2D3-7
- HMDによる視覚と人工筋による力覚の同時提示による仮想的階段歩行に関する評価
〇奥村 拓海(広島大学大学院先進理工系科学研究科)、栗田 雄一(広島大学大学院先進理工系科学研究科) - 本研究では,複数の感覚の相互作用によって階段歩行時の感覚を知覚させる錯覚システムを提案する.V Rによって仮想的な階段を提示し,空気圧人工筋によって下肢の筋負荷を促進させることで,平らな床を歩きながら階段歩行の感覚を誘起させた.筋活動レベルでどの程度階段歩行を再現できているかを検証した結果,大腿部において階段歩行時と同程度の筋活動量が得られることを確認した.

- 2D3-8
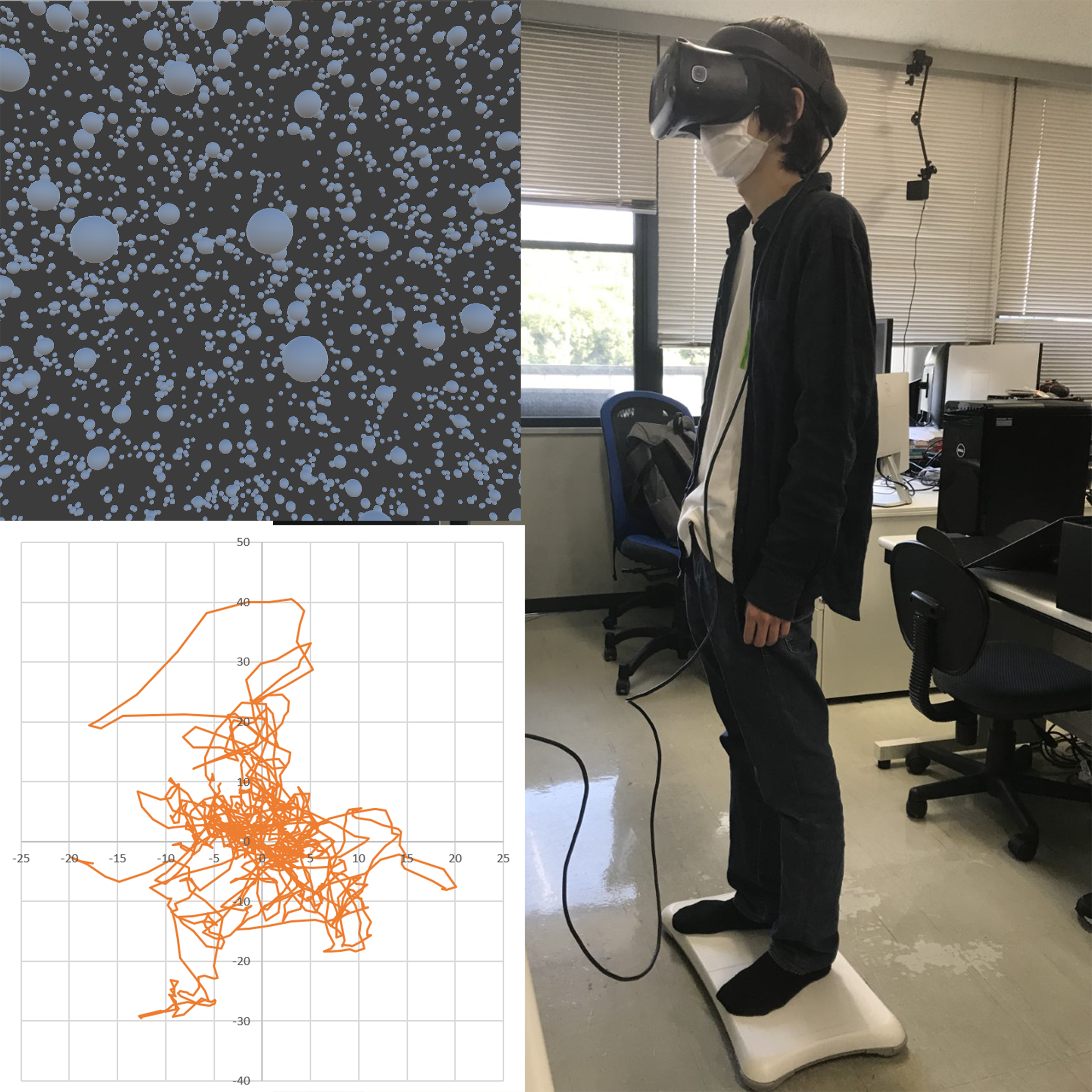
- 没入型VRにおける両眼立体視と頭部位置・姿勢追跡が及ぼす視覚誘導性自己運動感覚への影響に関する検討
〇堤 健太朗(福岡工業大学)、石原 真記夫(福岡工業大学) - 本研究は視覚誘導性自己運動感覚であるVectionに関する議論を行い,両眼立体視の有無や頭部位置・姿勢追跡の有無との関連を検証する.空間に一様に配置される球体が上下,左右,前後に等速移動する映像を被験者に提示し,重心動揺の計測を行う.結果として,頭部位置・姿勢追跡の有無は知覚されるVectionの方向に関与する傾向がみられ,お互いに反する方向への重心動揺がみられた.
一般発表 16:00-17:20 触力覚(機構・計測)
- 2E3-1
- 2軸モーションプラットフォームによる2足歩行ロボットの搭乗感呈示法の改良
〇森 恭介(広島市立大学)、脇田 航(広島市立大学) - 我々は,2足歩行ロボットに搭乗する際の衝撃,振動,急斜面などの6自由度の運動を2軸モーションプラットフォームの回転運動に近似させることで,高臨場かつ低コストな2足歩行ロボットの搭乗感呈示を目指している.本研究では,2軸モーションプラットフォームを用いて2足歩行ロボットの歩行中に生じる上下運動の振動および足が地面に着地したときに生じる撃力による高周波振動を付加した振動の改良を試みる.
- 2E3-2
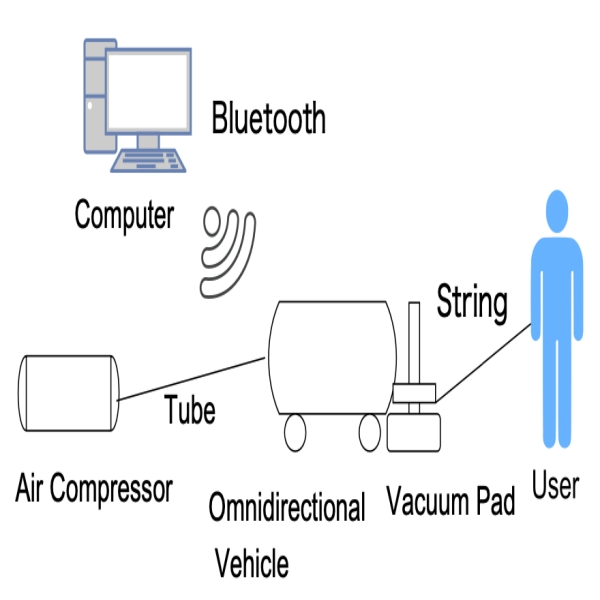
- 真空ブレーキの動的制御における制御周波数の違いによる知覚変化の検証
〇際田 直樹(熊本大学大学院)、嵯峨 智(熊本大学大学院) - 我々はこれまで全方向移動車と真空を利用したブレーキを組み合わせたデバイスによる力覚提示手法を提案してきた.以前の実験により電磁弁をPWM制御することで力覚表現の多様化が可能であることが示唆される一方で,周波数によっては提示される力覚が振動のように感じてしまうという課題が判明した.今回はPWM制御周波数を変化させ,ユーザが振動を感じにくくなる周波数を同定することを目的とし,制御周波数の変化に伴うユーザの知覚変化を評価した実験について報告する.
- 2E3-3
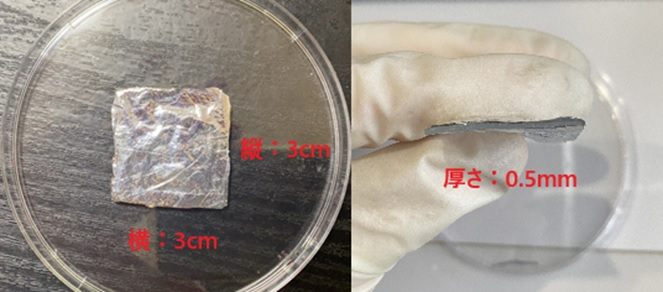
- 柔軟型圧電デバイスの検討
〇曽根 順治(東京工芸大学)、飯田 麗司(東京工芸大学)、佐藤 龍弥(東京工芸大学)、栁川 信明(東京工芸大学) - プリチャージ型の柔軟圧電デバイスを検討している。その内容を説明する。
- 2E3-4
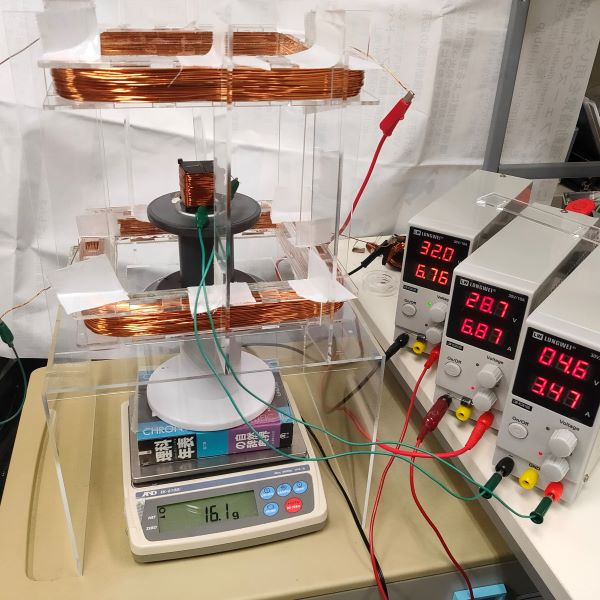
- 磁力による高品位な遠隔力覚提示に関する基礎検討
〇田中 叡(電気通信大学、日本学術振興会特別研究員)、梶本 裕之(電気通信大学) - 力覚提示装置の多くは、ロボットアームなどを用いて指などを駆動する接地型と、力錯覚や筋電気刺激などを利用した非接地型に大別される。しかし前者ではロボットアーム等の干渉、後者では個人差や制御の難しさといった問題が生じる。そこで本研究では磁力を用いて把持物体を駆動することにより、把持物体をアームなどで接地することなく安定的な力覚を提示する手法を提案し、その実現性を評価する。
- 2E3-5
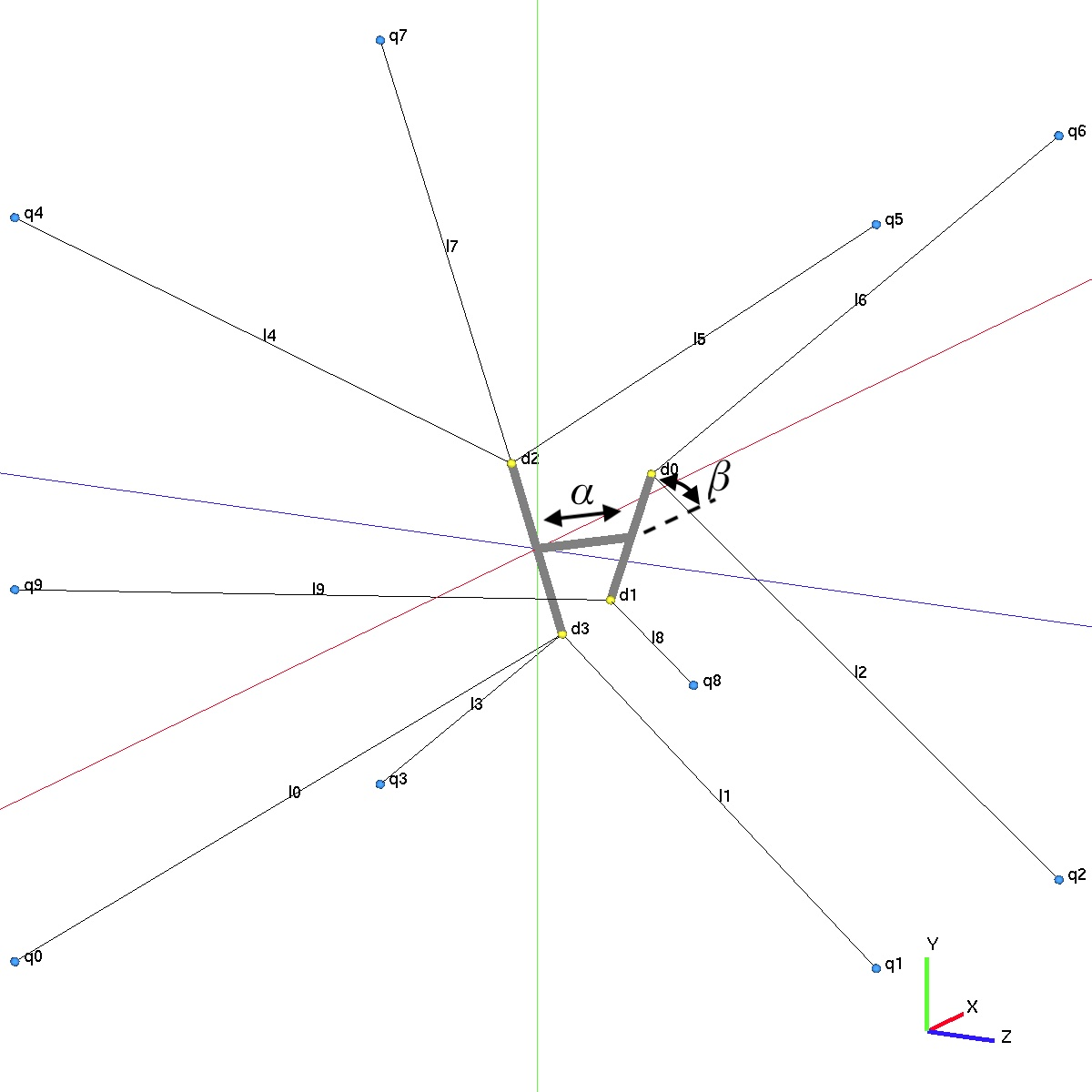
- シリンジ操作を実現する8自由度ワイヤ駆動型力覚提示装置の提案
〇赤羽 克仁(東京工業大学) - 本研究では,シリンジ操作を実現する8自由度ワイヤ駆動型力覚提示装置の提案を行う.シリンジ全体の並進と回転の6自由度の力覚提示のみならず,外筒と内筒の関係を並進と回転の2自由度として合計8自由度の穿刺操作を実現することを目的とする.提案手法を検証する為に,可動域における位置・姿勢の計測について計算機シミュレーションを行った.
- 2E3-6
- 爪からの加振による指腹部触覚センシング
〇梶本 裕之(電気通信大学)
- 2E3-7
- 空気中における凹凸面に対する指先変形の計測システム
〇和田 佳久(愛知工科大学)、田川 和義(愛知工科大学)
- 2E3-8
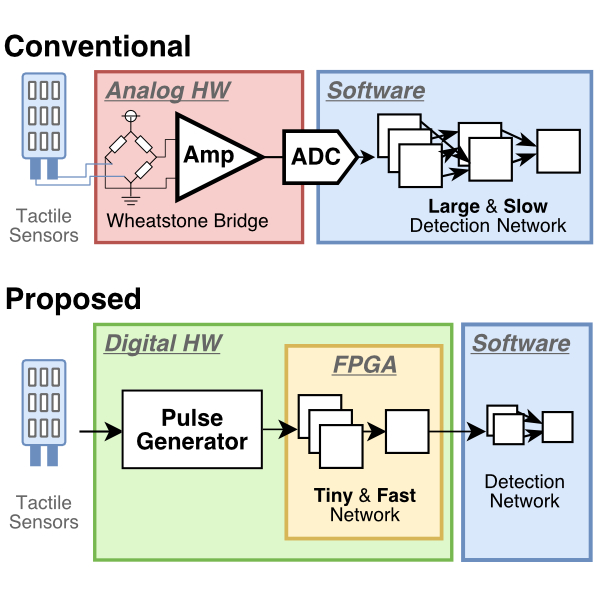
- MEMS触覚センサ向け機械学習のためのFPGAによるSNNパーセプトロン実装
〇青木 雅典(立命館大学)、 嬉真花(立命館大学)、安藤 潤人(立命館大学)、寒川 雅之(新潟大学)、秋田 純一(金沢大学)、野間 春生(立命館大学) - 我々の開発しているMEMS触覚センサでは、得られたデータをリアルタイムに処理可能なシステムが求められている。ソフトウェアによる機械学習では、<#%BR%#>回路規模や消費電力、リアルタイム性の観点から実装することが難しい。そこで、本研究ではFPGAによってリアルタイムに処理することを目的として、ハードウェア機械学習の一例としてスパイキングを用いたパーセプトロンを実装し、その可能性を検討した。
技術・芸術展示 14:30-15:50 技術・芸術展示
- 2G-1
- 2軸モーションプラットフォームによる2足歩行ロボットの搭乗感呈示法の改良
〇森 恭介(広島市立大学)、脇田 航(広島市立大学) - 我々は,2足歩行ロボットに搭乗する際の衝撃,振動,急斜面などの6自由度の運動を2軸モーションプラットフォームの回転運動に近似させることで,高臨場かつ低コストな2足歩行ロボットの搭乗感呈示を目指している.本研究では,2軸モーションプラットフォームを用いて2足歩行ロボットの歩行中に生じる上下運動の振動および足が地面に着地したときに生じる撃力による高周波振動を付加した振動の改良を試みる.
- 2G-2
- 体幹トレーニングのためのインタラクティブに揺動可能な飛行システム
〇福山 陸(広島市立大学)、脇田 航(広島市立大学) - 近年,VRトレーニングシステムに関する研究開発がいくつか行われているが,モーションプラットフォームを用いてユーザの体の動きに応じてインタラクティブに操作可能なものはあまり例がない.そこで本研究では,モーションプラットフォームによるインタラクティブな体幹トレーニングを実現するため,VR空間内の環境変化および体験者の荷重移動操作によって慣性力等の外力や機体の傾きを呈示可能な飛行システムを構築した.
- 2G-3
- 磁力による高品位な遠隔力覚提示に関する基礎検討
〇田中 叡(電気通信大学、日本学術振興会特別研究員)、梶本 裕之(電気通信大学) - 力覚提示装置の多くは、ロボットアームなどを用いて指などを駆動する接地型と、力錯覚や筋電気刺激などを利用した非接地型に大別される。しかし前者ではロボットアーム等の干渉、後者では個人差や制御の難しさといった問題が生じる。そこで本研究では磁力を用いて把持物体を駆動することにより、把持物体をアームなどで接地することなく安定的な力覚を提示する手法を提案し、その実現性を評価する。
- 2G-4
- 集束超音波による圧覚点の指先追従に基づく静的面触感の空中提示
〇森崎 汰雄(東京大学)、藤原 正浩(東京大学)、牧野 泰才(東京大学)、篠田 裕之(東京大学) - 集束超音波は非接触に触覚を提示できる。超音波で物体表面の触感を再現する場合、基本要素として一様で滑らかな(振動のない)静的面の触感が必要となる。静的面で物体との接触感が再現でき、さらに振動を重畳すれば様々な物体の触感再現が実現する。従来の超音波による面提示はいずれも振動を伴う。本研究ではまず超音波の刺激点を細かく周期移動させ圧覚を提示する。その圧覚点を指先に追従させることで静的面の触感を提示する。
- 2G-5
- 真空ブレーキの動的制御における制御周波数の違いによる知覚変化の検証
〇際田 直樹(熊本大学大学院)、嵯峨 智(熊本大学大学院) - 我々はこれまで全方向移動車と真空を利用したブレーキを組み合わせたデバイスによる力覚提示手法を提案してきた.以前の実験により電磁弁をPWM制御することで力覚表現の多様化が可能であることが示唆される一方で,周波数によっては提示される力覚が振動のように感じてしまうという課題が判明した.今回はPWM制御周波数を変化させ,ユーザが振動を感じにくくなる周波数を同定することを目的とし,制御周波数の変化に伴うユーザの知覚変化を評価した実験について報告する.
- 2G-6
- 球体姿勢に対応した回転相殺テクスチャの高速投影の残像効果による一軸回転可視化法の提案
〇三河 祐梨(東京大学)、末石 智大(東京大学)、石川 正俊(東京大学) - 近年,空間型拡張現実ディスプレイにより運動情報を空間的かつリアルタイムに提示し,人間への直感的なスポーツ教示を試みる研究が活発である.しかし,回転情報のリアルタイム提示にあたって,推定の精度と速度のトレードオフの問題があった.そこで本研究は,回転相殺テクスチャの姿勢変化対応の高速投影の残像効果による,球体の1軸回転の図形的な可視化手法を提案する.実機投影による評価により本提案の妥当性が確認された.
- 2G-7
- ⻭科インプラント治療におけるAR式サージカルガイドの開発 -マーカの認識精度を向上させる環境の調査-
〇安黒 翔(東京理科大学大学院 工学研究科 情報工学専攻)、加納 徹(東京理科大学 工学部 情報工学科)、竹林 晃(医療工学研究所)、赤倉 貴子(東京理科大学 工学部 情報工学科)
- 2G-8
- 生理指標による不安レベル推定を用いたVR暴露療法システムの開発
〇木場 晏也(大阪工業大学院)、大須賀 美恵子(大阪工業大学院) - 社交不安症の治療法としてVirtual Reality(VR)を用いた暴露療法がある.治療者が患者の暴露体験(VRコンテンツ)を共有し,制御できることがVR導入の利点である.我々は,生理指標を用いて推定した不安レベルに応じてコンテンツを変更するVR暴露療法システムを提案し,プロトタイプを開発した.本報では,これを用いて模擬面接実験を行い,実験参加者の不安レベル制御の可能性を検討した結果を報告する.
- 2G-9
- 三代目MRピタゴラ兄妹 with RV-XoverKit ~エデュテインメント作品制作に適したツールの利用例~
〇福田 裕美(立命館大学)、敷島 歩(立命館大学大学院)、石田 隼也(立命館大学大学院)、木村 朝子(立命館大学)、田村 秀行(立命館大学)、柴田 史久(立命館大学) - 複合現実感(MR)の導入により,エデュテインメント作品を独創性に富んだものすることが期待できる.筆者らは,現実空間・仮想空間の相互遷移や両空間でトリガーをかけ合う機能を実現するツールキットRV-XoverKitの提供により,作品制作者の創造力を発揮しやすくすることを目指している.その利用事例として,現実空間と仮想空間を往き来する体験型デモ作品を制作したので,その動作の模様を技術展示する.
- 2G-10
- 簡易没入型VR歩行システムを用いた地面傾斜の知覚評価
〇森崎 慶人(広島市立大学)、脇田 航(広島市立大学) - ボタン操作によるVR空間の移動方法は実際の歩行とは異なり,VR酔いの原因となる.これらの問題を解決するには歩行装置が必要だが,従来,トレッドミル型や足踏み型等,様々な方式が研究開発される中,我々は進行方向に大腿部を支持することで歩行感覚を錯覚させる手法を提案している.しかし,提案装置を用いて傾斜を含む歩行移動の際に,どれ程の臨場感があるかが明確でないため,本研究ではこれらについて主観評価実験を行う.
- 2G-11
- VR/AR手術機器ミュージアムにおける手術教育
〇藤原 道隆(名古屋大学大学院医学系研究科 メディカルxRセンター)、桜井 麻奈美(名古屋大学大学院医学系研究科 メディカルxRセンター)、岩本 朗(リキッドデザイン株式会社) - 当センターは,シミュレーション医療教育,研究,診療支援の施設である.中核であるSimサージ&ギャラリーは,1990年代から急激に発展した内視鏡手術機器を中心としたミュージアムの中に,手術VRシミュレータを配置するユニークな構造である.各種の手術セミナーを行ってきたが,昨年からCovid-19感染のため,可能な限り遠隔にシフトした.ミュージアムをバーチャルミュージアムとしてwebでアクセス可能とし,機器の3D表示化も着手した.
