Tuesday, 14 September
9月14日
技術・芸術展示 14:30-15:50
- 3G-1
- 簡易没入型VR歩行システムによるVRSNSへの入力機器エミュレーション
〇木戸 功了(広島市立大学)、脇田 航(広島市立大学) - VRChatやCluster等のVRSNSではフルボディトラッキングによってVR空間内を自身の足で歩き回ることができるが,歩行可能な空間の確保の問題やVR酔いの問題がある一方,VR空間内を歩行するための装置についてもコストや安全性等の問題がある.そこで本研究では,ユーザの進行方向に大腿部を支持し,推定した歩行動作に応じて映像呈示することで歩行感覚を錯覚可能な簡易没入型VR歩行システムを用いて既存のVRSNSへの入力機器エミュレーションを行う.
- 3G-2
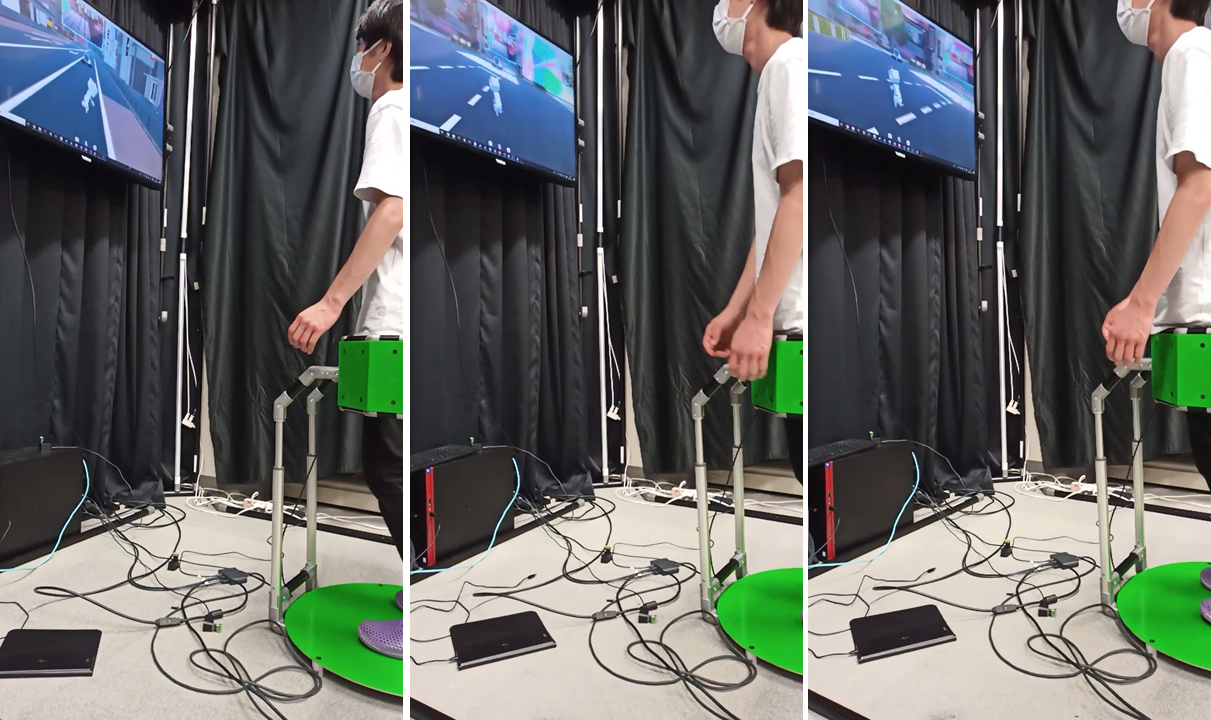
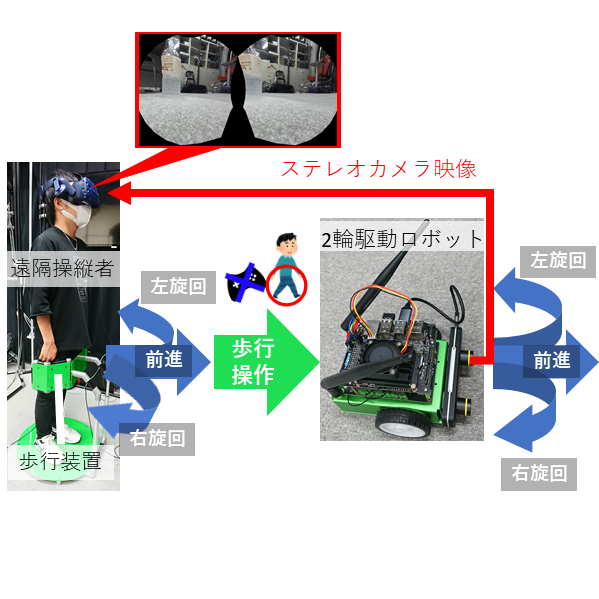
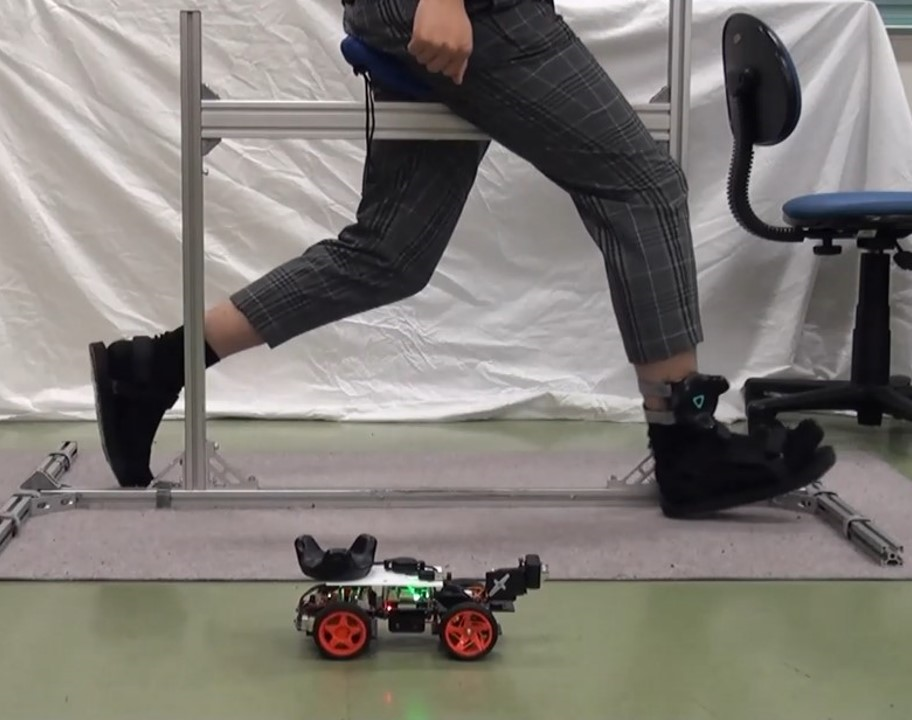
- 歩行感覚呈示可能なテレイグジスタンスシステム
〇野村 柾貴(広島市立大学大学院情報科学研究科)、脇田 航(広島市立大学大学院情報科学研究科) - 従来のテレイグジスタンスシステムでは,モーションベースによる移動感覚の呈示やコントローラによる操作が行われているが,歩行移動可能なものはあまり例がない.ユーザの歩行動作に応じて移動ロボットを操作できれば,歩行感覚をともなう高臨場なテレイグジスタンスが実現できる.そこで本研究では,手始めに歩行装置を用いて操縦者の歩行動作から2輪駆動ロボットを移動操作可能なテレイグジスタンスシステムを構築した.
- 3G-3
-
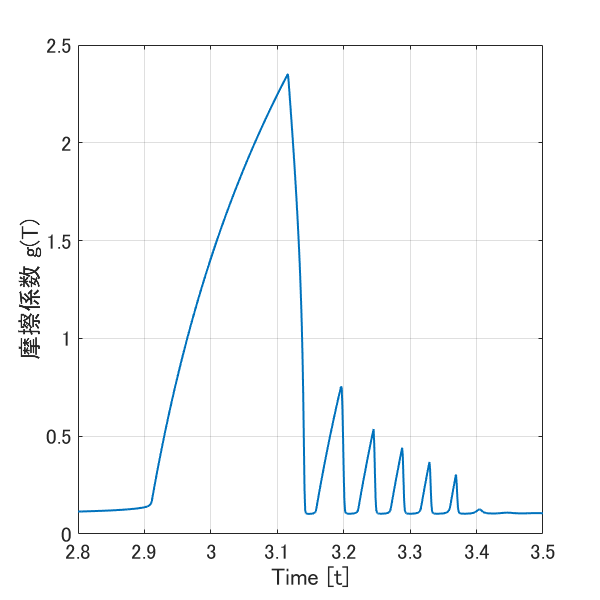
- 様々な摩擦現象を再現する力触覚レンダリングのための摩擦モデルの提案
〇中原 線(東京工業大学工学院情報通信系情報通信コース長谷川晶一研究室)、長谷川 晶一(東京工業大学工学院情報通信系情報通信コース長谷川晶一研究室) - 従来の力触覚レンダリング手法で提示される摩擦は、静止摩擦と動摩擦からなるCoulomb摩擦であった。しかし、現実にはそれ以外にも様々な摩擦現象が存在し、これらを再現することができればVRシステムにおける触覚提示の向上が期待できる。本研究では、Stribeck効果や部分滑りなどの摩擦現象を再現するLuGreモデルを拡張して、時変静止摩擦をも再現できる力触覚レンダリングのための摩擦モデルを提案する。
- 3G-4
-
- 指先の力触覚を身体の他部位に提示するウェアラブルデバイスの開発(第4報): 左右の前腕及び足首における検討
〇森山 多覇(電気通信大学 大学院情報理工学研究科)、梶本 裕之(電気通信大学 大学院情報理工学研究科) - VR空間内の物体に対する指先への触覚提示デバイスは,指の動きを妨げてしまう問題がある.そこで,本研究では本来指先で知覚する物理的な力触覚を,身体の他部位に転移するデバイスを提案する.本稿では,親指と人差し指の指先に加わる力の大きさと方向を,左右の前腕と足首の合計4か所に,5節リンク機構を用いたデバイスで提示した.4か所の内でVR物体を操作する時に最も違和感なく,触覚を提示可能な部位について調べた.

- 3G-5
-
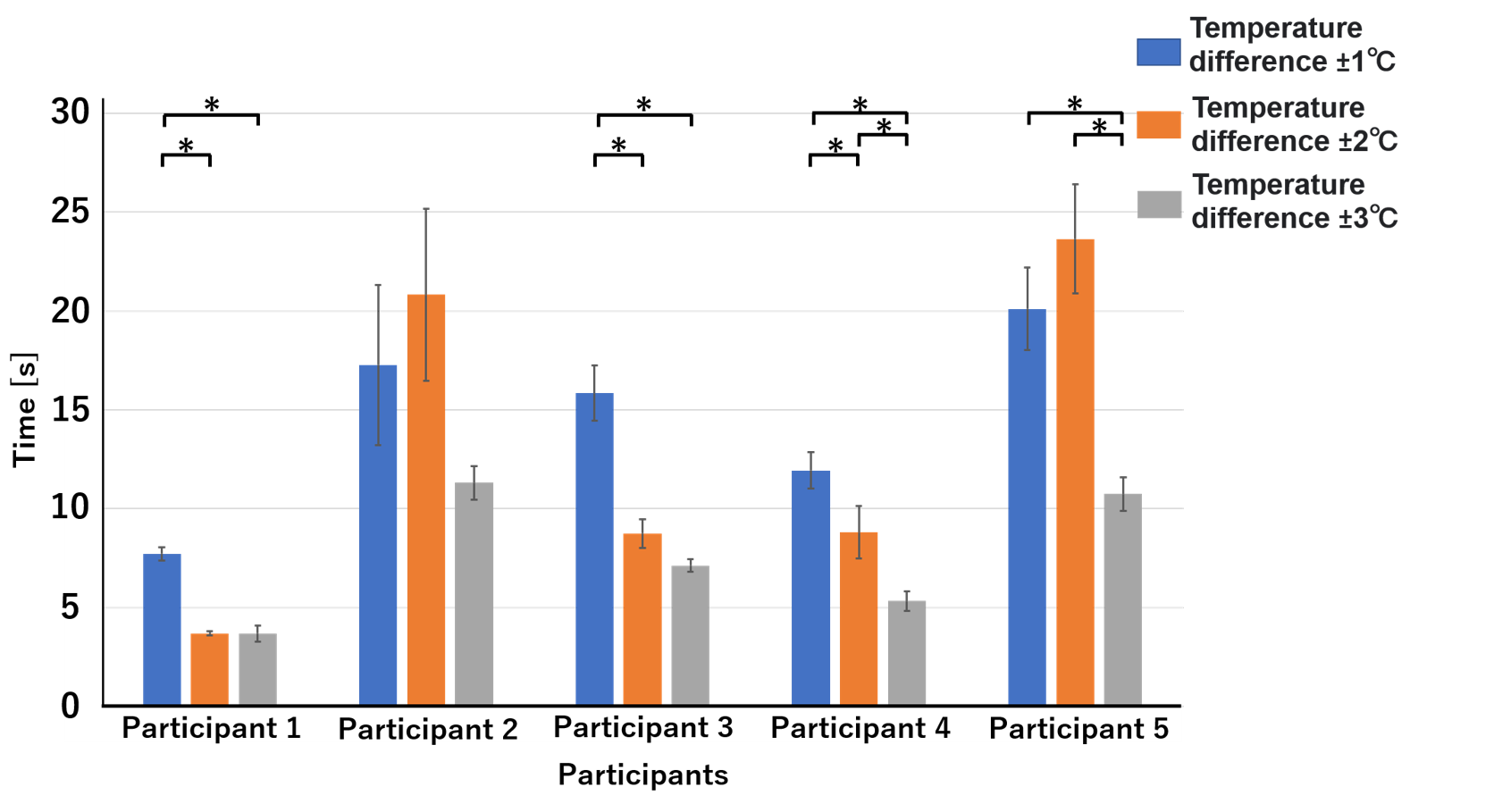
- 無関帯での予冷予熱温度の差によるThermal grill illusion発生時間の変化
〇木本 涼太郎(熊本大学院自然科学教育部)、嵯峨 智(熊本大学院自然科学教育部) - 我々の以前の研究では予熱予冷を行いThermal grill illusionを行うと痛みを知覚するまでの時間が短縮されることがわかった。そこで人が温覚冷覚共に順応する無関帯と言われる温度帯である30℃から36℃の間で予熱予冷の温度の差を±1℃、±2℃、±3℃と大きくして行った場合の痛みを知覚するまでの時間変化を定量的に評価する。
- 3G-6
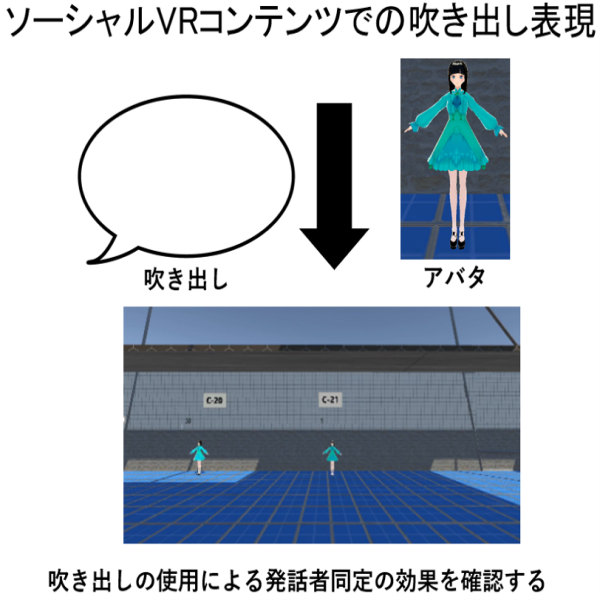
- ソーシャルVRコンテンツにおけるアバタへの吹き出し表現の付与による発話者同定手法の提案
〇YANG Guang(立命館大学 情報理工学研究科)、松村 耕平(立命館大学 情報理工学研究科)、大井翔(大阪工業大学情報科学部)、野間 春生(立命館大学 情報理工学研究科) - ソーシャルVRコンテンツでは、VR空間においてアバタを媒介として音声によるユーザ同士のコミュニケーションが可能である。このコンテンツにおける問題点として、発話中のユーザを特定することが難しいことや、どのユーザがなんの会話をしているのかの同定が難しいことがある。本研究では、発話中のアバタに吹き出しを付与することでこれらの問題を解決することを目指す。
- 3G-7
-
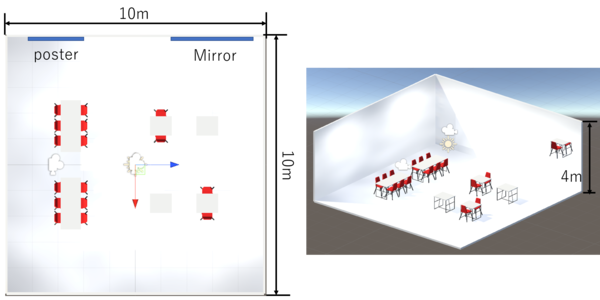
- VR環境でのコミュニケーションにおける鏡の効果
〇亀岡 嵩幸(電気通信大学、日本学術振興会)、金子 征太郎(電気通信大学、日本学術振興会) - VRSNSにおいてユーザーが鑑の前に集まる現象が知られている。VR空間上の鑑はアバターに対する自己身体性を生起させることが知られているが、我々は鑑の存在が他者へのプレゼンスを向上させ、ひいてはコミュニケーションの円滑化に繋がるのではないかと考えた。本発表ではVR空間における鑑の存在がユーザーにどのような行動を誘発するのか実験的に調査した結果を報告する。
- 3G-8
-
- サドル型歩行デバイスを用いた移動ロボットの遠隔操作に関する研究
〇坂口 正道(名古屋工業大学 大学院工学研究科)、久米 俊輔(名古屋工業大学 大学院工学研究科) - 我々は,サドルに座り体重を免荷しながら実際の歩行と同様の動作が可能なサドル型歩行デバイスを開発した.本研究では,サドル型歩行デバイスを用いた歩行動作による移動ロボットの遠隔操作を行った.本発表では,開発したシステムの概要や制御アルゴリズムについて発表する.
- 3G-9
-
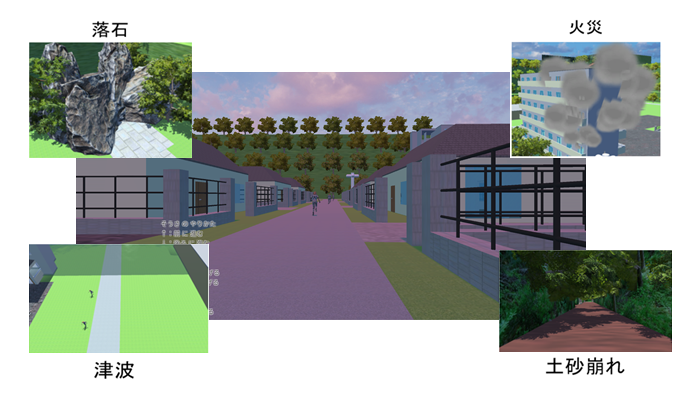
- 避難訓練アプリケーションDeVAを活用した避難者行動の傾向調査
〇福本 考生(大阪工業大学 情報科学部)、松下 智晴(大阪工業大学 情報科学部)、菊池 晶陽(大阪工業大学 情報科学部)、大井 翔(大阪工業大学 情報科学部)、後藤 壮史(奈良県王寺町立王寺小学校)、佐野 睦夫(大阪工業大学 情報科学部) - 我々はこれまでに避難者を対象とした災害体験アプリケーションDeVAの開発を行っている.DeVAはNPCによる災害心理モデルを組み込み,様々なシナリオを体験し、避難者の行動とその評価を振り返ることで,避難者に防災意識を定着させるアプリケーションである.しかし,一部の避難者の体験を確認したところ,同じ行動パターンで作業的に体験している避難者がいた.そこで,本研究ではDeVAによって災害時における避難者の防災行動を調査する.
- 3G-10
-
- 授業訓練システムにおけるマルチエージェントプランニングに関する検討
〇桝本 智絵(大阪工業大学大学院 情報科学研究科)、大井 翔(大阪工業大学 情報科学部)、佐野 睦夫(大阪工業大学 情報科学部) - 教員志望者が実習など実際の現場で授業を訓練する機会は少ない。実践経験が少ないまま現場に出ることで、自身の想定と違う出来事にギャップを感じストレスになる可能性がある。そこで本研究では、仮想的な教室をスクリーンに映し出し授業の訓練ができるシステムを提案する。授業の評価をリアルタイムで行い外部パラメータを操作する。また生徒エージェントが他のエージェントに干渉して動作することで教室の雰囲気を作り出す。

- 3G-11
-
- フライ捕球における苦手原因を気づかせるVR支援システムの提案
〇上田 浩嗣(大阪工業大学 情報科学研究科)、橋本 渉(大阪工業大学 情報科学部)、西口 敏司(大阪工業大学 情報科学部)、水谷 泰治(大阪工業大学 情報科学部) - 野球のフライ捕球において何が苦手意識(恐怖心)を生む原因になっているかをVR空間上でフライ捕球を行うことで気づかせることを目的とする。また、その原因の改善のためにVR空間で適切な支援が可能かどうか検討する。
