Tuesday, 14 September
9月14日
一般発表 13:00-14:20 テレプレゼンス・融合身体
座長:杉本 麻樹(慶應義塾大学)
- 3D2-1
-
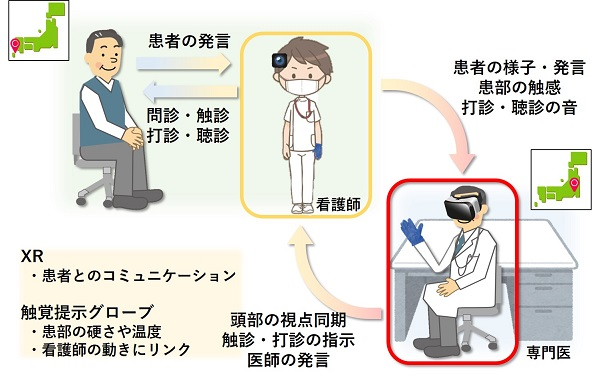
- 遠隔触診システムの研究 (第1報) ~遠隔診療の調査と医師ヒアリングまとめ~
〇神島 海音(早稲田大学 創造理工学部)、加藤 史洋(早稲田大学 創造理工学部、東京大学 先端科学技術研究センター)、半田 匠(早稲田大学 創造理工学部)、岩田 浩康(早稲田大学 創造理工学部、東京大学 先端科学技術研究センター) - 本報告では遠隔診療の現状を俯瞰するため、医療、バーチャルリアリティ、ロボット分野の関連研究を調べた。また、臨床の医師のヒアリングを経て、遠隔触診システムに求められる要求仕様をまとめた。遠隔診療ではビデオ通話による問診が行われているが、触診ができないために症状の見逃しリスクがある。患者の近くにいる看護師が患部を触れ遠隔の専門医と共有することによるシナリオが現実的な解の一つであることを考察した。
- 3D2-2
-
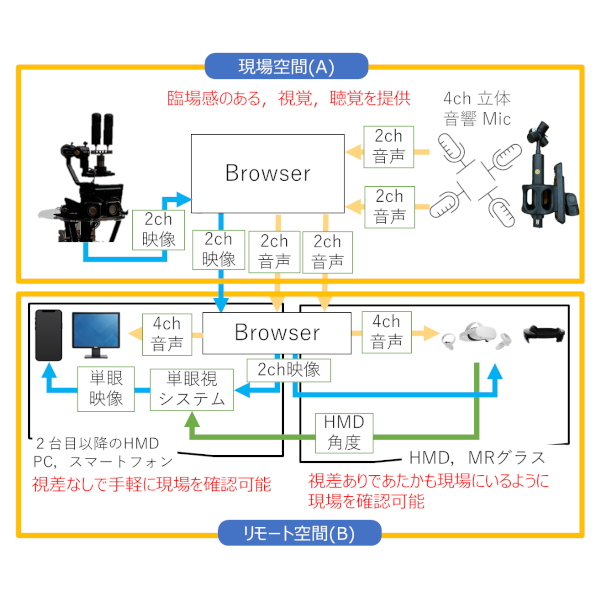
- XRによる対話支援テレエクスペリエンスシステムに関する研究
〇菊地 勇輔(東京都立大学大学院システムデザイン研究科)、ヤェム ヴィボル(東京都立大学大学院システムデザイン研究科)、長井 超慧(東京都立大学大学院システムデザイン研究科)、池井 寧(東京大学大学院情報理工学系研究科) - 遠隔地間で空間を共有し,共同作業を行うためには,空間の全方位に対する
映像・音声を同時に複数人で共有することが必要である.アバターの
表現も複数を定位させた提示により,XR空間においても自然な対話に近づける
ことが可能となる.これらの機能を与えるシステム構成について紹介する.
- 3D2-3
-
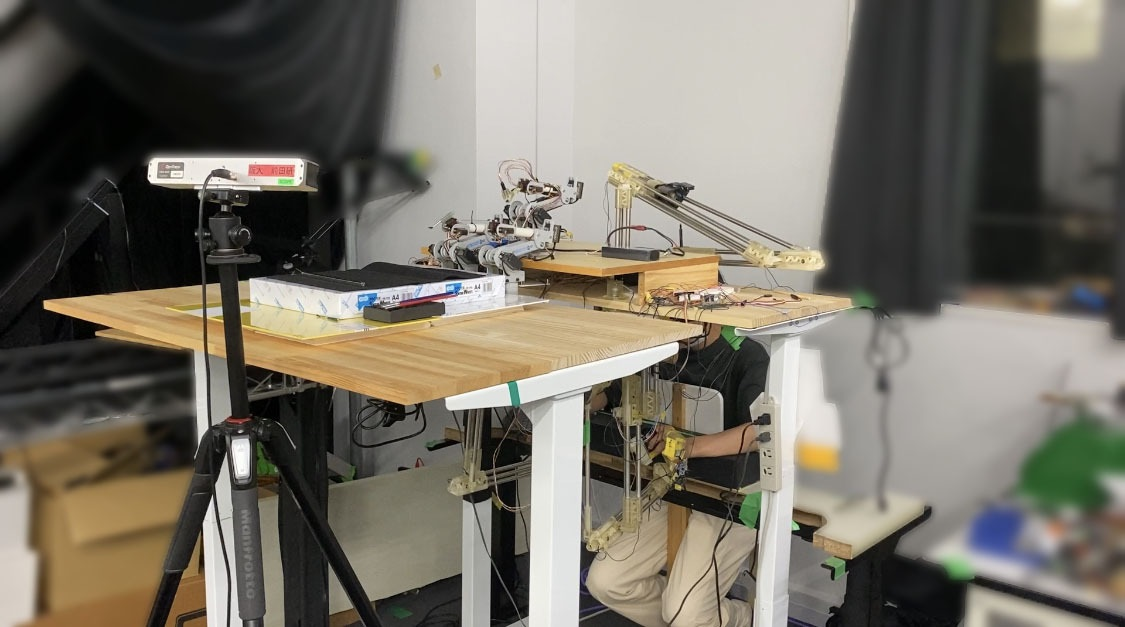
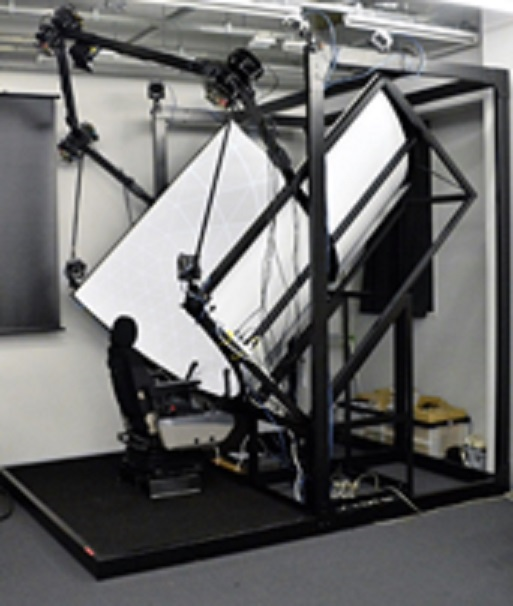
- スケールダウン環境下へのスキル伝達 ―拡張テレイグジスタンスへの挑戦 第2報―
〇平山 智貴(大阪大学 大学院情報科学研究科)、宮本 拓(大阪大学 大学院情報科学研究科、日本学術振興会)、松岡 哲平(大阪大学 大学院情報科学研究科)、大石 つぐみ(大阪大学 大学院情報科学研究科)、古川 正紘(大阪大学 大学院情報科学研究科、脳情報通信融合研究センター)、前田 太郎(大阪大学 大学院情報科学研究科、脳情報通信融合研究センター) - 従来のテレイグジスタンスは人間と等身大のフォロワを用いて実現していた.しかし人間と等身大という制約が利用可能な環境を制限しているといえる.本研究では,フォロワをスケールダウンしたテレイグジスタンスシステムを構築した.本報告では,このシステムを用いて実空間で習得したスキルがスケールダウン環境下でも発揮されることを、習字スキルの伝達実験を用いて示すことで,テレイグジスタンスの拡張可能性を提案する.
- 3D2-4
-
- 能動運動視による絶対奥行き知覚 ―拡張テレイグジスタンスへの挑戦 第1報―
〇松岡 哲平(大阪大学大学院)、黒川 正崇(大阪大学大学院)、宮本 拓(大阪大学大学院、日本学術振興会(DC2))、中谷内 優人(大阪大学大学院)、古川 正紘(大阪大学大学院、脳情報通信融合研究センター)、前田 太郎(大阪大学大学院、脳情報通信融合研究センター) - 人間の空間把握において両眼視と運動視がある.両眼視は図の理解,運動視は地の理解を得意としている.運動視,特に能動運動視が地の理解に必要不可欠である.しかし,従来のテレイグジスタンスにおいて,運動視は重視されておらず,奥行き知覚が十分にできなかった.そこで能動運動視による奥行き知覚の条件について整理し,実際に条件をそろえた場合,連続視点ではない映像提示でも絶対奥行き知覚が出来ることを示す.
- 3D2-5
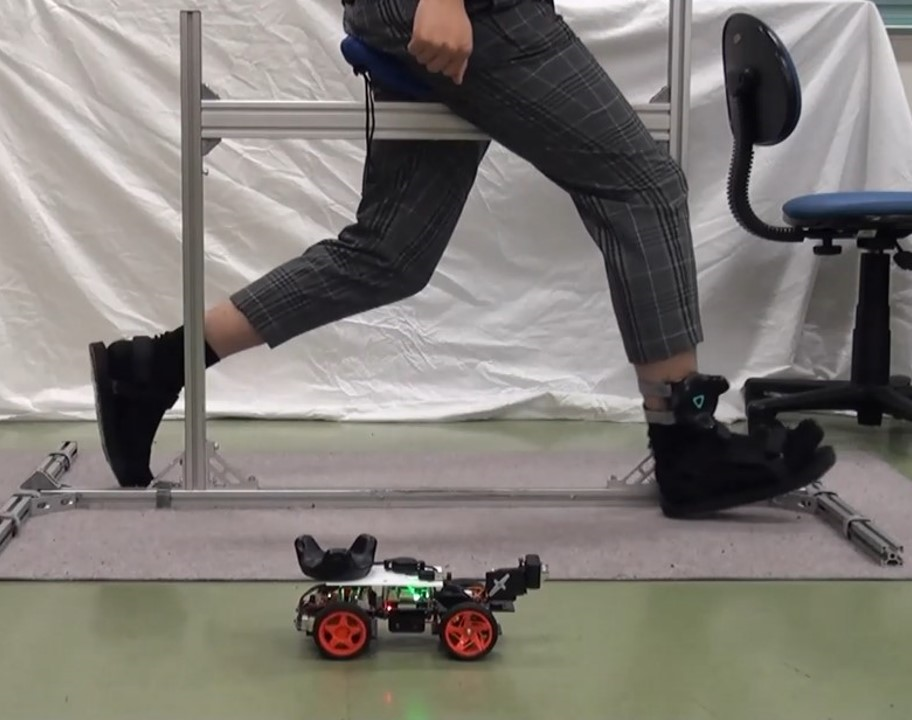
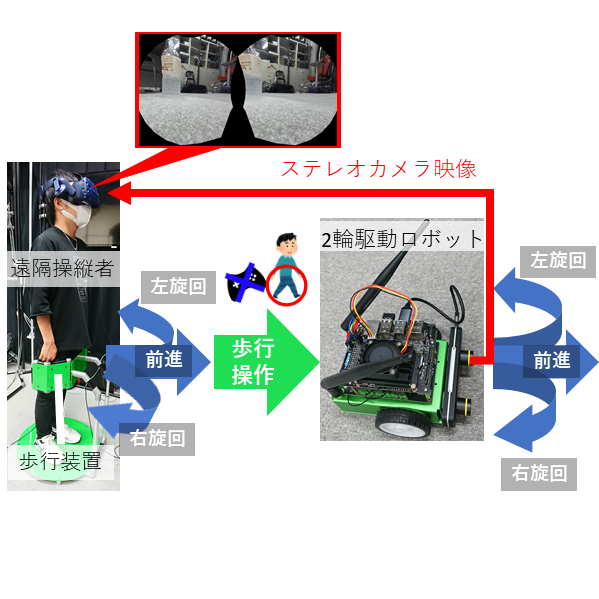
- 歩行感覚呈示可能なテレイグジスタンスシステム
〇野村 柾貴(広島市立大学大学院情報科学研究科)、脇田 航(広島市立大学大学院情報科学研究科) - 従来のテレイグジスタンスシステムでは,モーションベースによる移動感覚の呈示やコントローラによる操作が行われているが,歩行移動可能なものはあまり例がない.ユーザの歩行動作に応じて移動ロボットを操作できれば,歩行感覚をともなう高臨場なテレイグジスタンスが実現できる.そこで本研究では,手始めに歩行装置を用いて操縦者の歩行動作から2輪駆動ロボットを移動操作可能なテレイグジスタンスシステムを構築した.
- 3D2-6
-
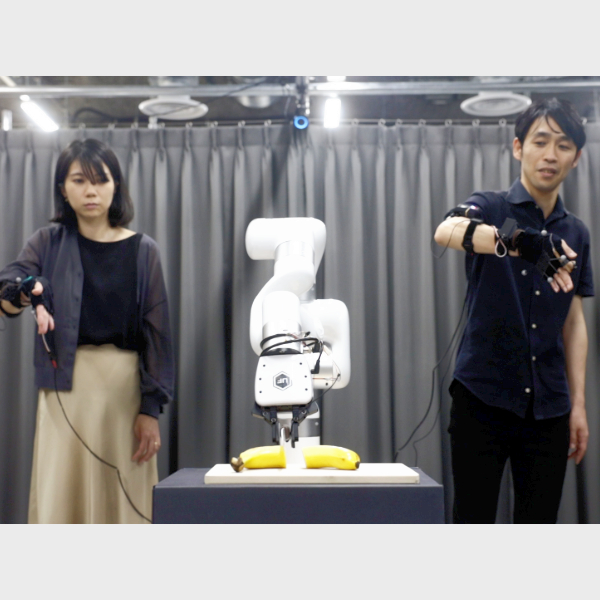
- ロボットアバターを介した身体融合における運動共有の基礎検討
〇萩原 隆義(慶應義塾大学大学院メディアデザイン研究科)、片桐 拓海(名古屋工業大学)、湯川 光(名古屋工業大学)、田中 由浩(名古屋工業大学)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 本研究では,複数人が1つのアバターを介して互いの感覚を共有し動作を融合することにより,異なる技能や経験を有する他者との身体的な共創を実現することを目指し,1つのロボットアームを2人が同時に操作し,協調作業を行うシステムを提案する.双方の運動を一定の割合で融合することで,技能伝達や異なる技能を持つ人同士の共創の誘発など,サイバーフィジカル社会における新しい共同作業の手法としての応用が考えられる.
- 3D2-7
-
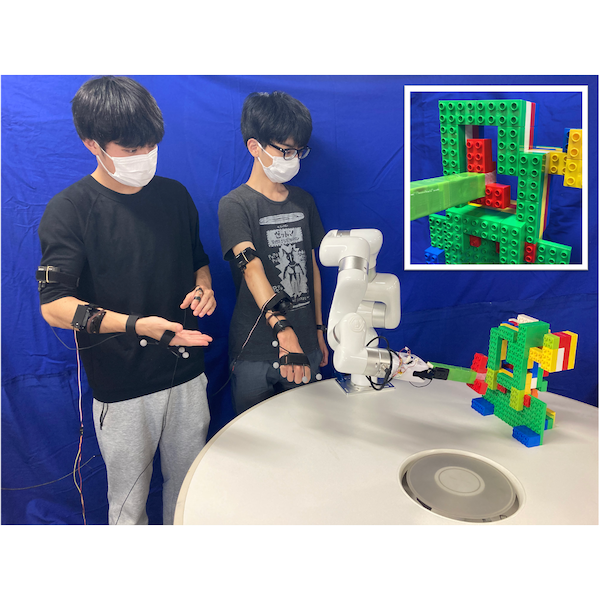
- ロボットアバターを介した身体融合における役割分担に関する基礎検討
〇片桐 拓海(名古屋工業大学大学院工学研究科)、小倉 樹(名古屋工業大学大学院工学研究科)、棚田 亮平(名古屋工業大学大学院工学研究科)、西村 匠生(名古屋工業大学大学院工学研究科)、湯川 光(名古屋工業大学大学院工学研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科)、田中 由浩(名古屋工業大学大学院工学研究科) - 本研究では,一台のロボットアームに対して二人が身体機能を分担して制御することで,身体融合を実現するシステムを提案する.把持操作などの作業を対象にして一人でロボットアームを制御した場合と比較し,二人による身体融合の効果を考察する.また,操作者間の連携のために触覚フィードバックの導入を検討し,操作性や認知特性に与える影響について検討する.
- 3D2-8
-
- サドル型歩行デバイスを用いた移動ロボットの遠隔操作に関する研究
〇坂口 正道(名古屋工業大学 大学院工学研究科)、久米 俊輔(名古屋工業大学 大学院工学研究科) - 我々は,サドルに座り体重を免荷しながら実際の歩行と同様の動作が可能なサドル型歩行デバイスを開発した.本研究では,サドル型歩行デバイスを用いた歩行動作による移動ロボットの遠隔操作を行った.本発表では,開発したシステムの概要や制御アルゴリズムについて発表する.