Monday, 13 September
9月13日
技術・芸術展示 14:30-15:50
- 2G-1
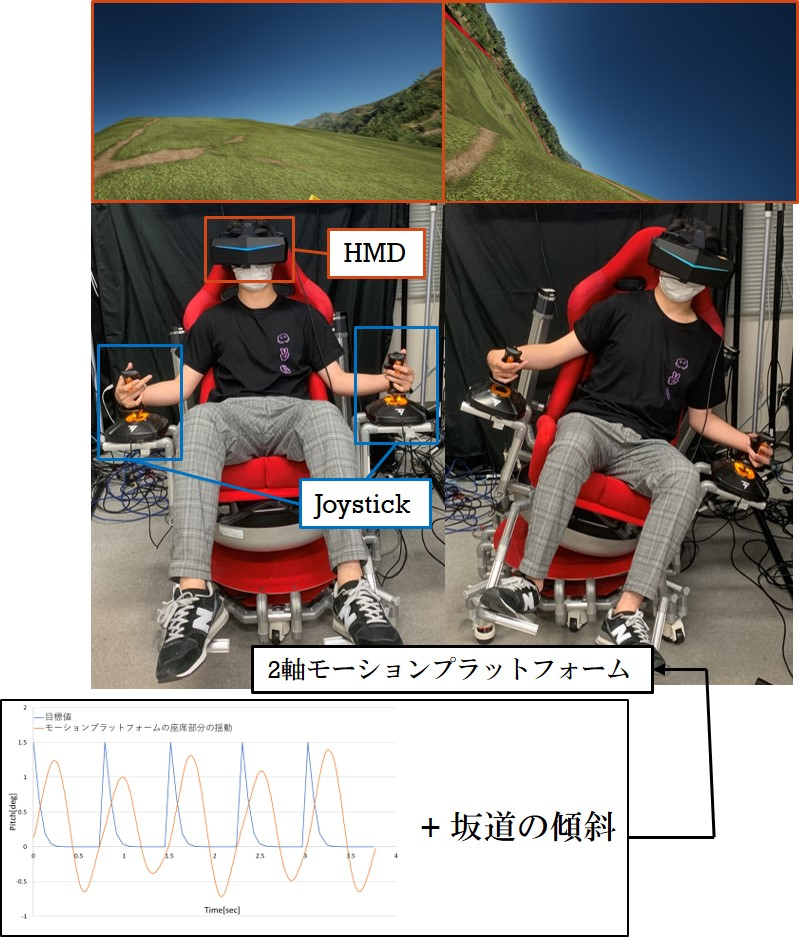
- 2軸モーションプラットフォームによる2足歩行ロボットの搭乗感呈示法の改良
〇森 恭介(広島市立大学大学院情報科学研究科)、脇田 航(広島市立大学大学院情報科学研究科) - 我々は,2足歩行ロボットに搭乗する際の衝撃,振動,急斜面などの6自由度の運動を2軸モーションプラットフォームの回転運動に近似させることで,高臨場かつ低コストな2足歩行ロボットの搭乗感呈示を目指している.本研究では,2軸モーションプラットフォームを用いて2足歩行ロボットの歩行中に生じる上下運動の振動および足が地面に着地したときに生じる撃力による高周波振動を付加した振動の改良を試みる.
- 2G-2
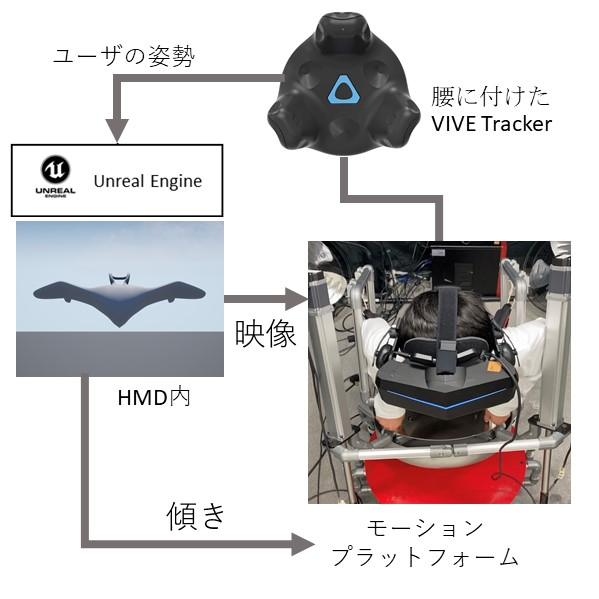
- 体幹トレーニングのためのインタラクティブ飛行システム
〇福山 陸(広島市立大学)、脇田 航(広島市立大学) - 近年,VRトレーニングシステムに関する研究開発がいくつか行われているが,モーションプラットフォームを用いてユーザの体の動きに応じてインタラクティブに操作可能なものはあまり例がない.そこで本研究では,モーションプラットフォームによるインタラクティブな体幹トレーニングを実現するため,VR空間内の環境変化および体験者の荷重移動操作によって慣性力等の外力や機体の傾きを呈示可能な飛行システムを構築した.
- 2G-3
-
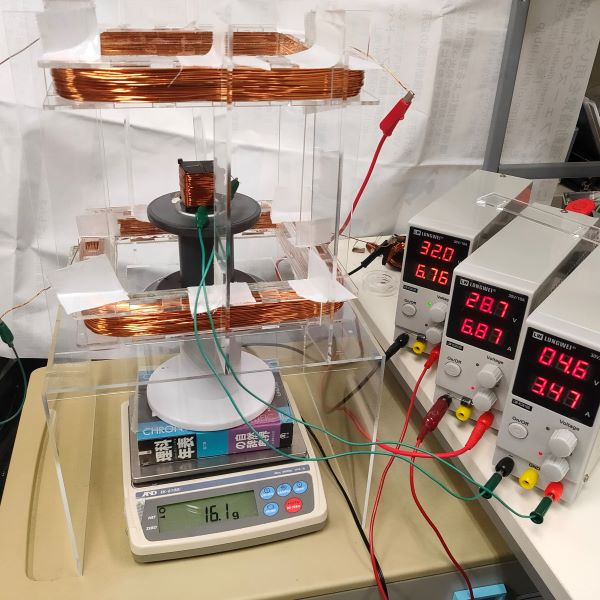
- 磁力による高品位な遠隔力覚提示に関する基礎検討
〇田中 叡(電気通信大学 情報理工学研究科、日本学術振興会特別研究員)、梶本 裕之(電気通信大学 情報理工学研究科) - 力覚提示装置の多くは、ロボットアームなどを用いて指などを駆動する接地型と、力錯覚や筋電気刺激などを利用した非接地型に大別される。しかし前者ではロボットアーム等の干渉、後者では個人差や制御の難しさといった問題が生じる。そこで本研究では磁力を用いて把持物体を駆動することにより、把持物体をアームなどで接地することなく安定的な力覚を提示する手法を提案し、その実現性を評価する。
- 2G-4
-
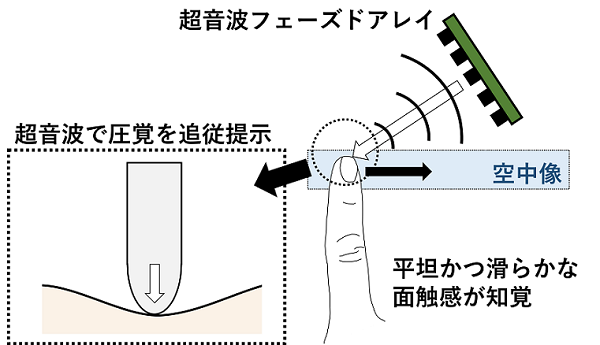
- 集束超音波による圧覚点の指先追従に基づく静的面触感の空中提示
〇森崎 汰雄(東京大学新領域創成科学研究科)、藤原 正浩(東京大学新領域創成科学研究科)、牧野 泰才(東京大学新領域創成科学研究科)、篠田 裕之(東京大学新領域創成科学研究科) - 集束超音波は非接触に触覚を提示できる。超音波で物体表面の触感を再現する場合、基本要素として一様で滑らかな(振動のない)静的面の触感が必要となる。静的面で物体との接触感が再現でき、さらに振動を重畳すれば様々な物体の触感再現が実現する。従来の超音波による面提示はいずれも振動を伴う。本研究ではまず超音波の刺激点を細かく周期移動させ圧覚を提示する。その圧覚点を指先に追従させることで静的面の触感を提示する。
- 2G-5
-
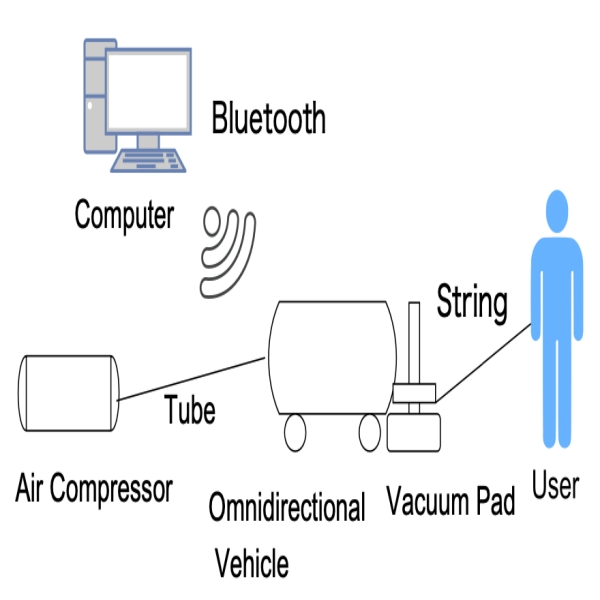
- 真空ブレーキの動的制御における制御周波数の違いによる知覚変化の検証
〇際田 直樹(熊本大学大学院 自然科学教育部)、嵯峨 智(熊本大学大学院 先端科学研究部) - 我々はこれまで全方向移動車と真空を利用したブレーキを組み合わせたデバイスによる力覚提示手法を提案してきた.以前の実験により電磁弁をPWM制御することで力覚表現の多様化が可能であることが示唆される一方で,周波数によっては提示される力覚が振動のように感じてしまうという課題が判明した.今回はPWM制御周波数を変化させ,ユーザが振動を感じにくくなる周波数を同定することを目的とし,制御周波数の変化に伴うユーザの知覚変化を評価した実験について報告する.
- 2G-6
-
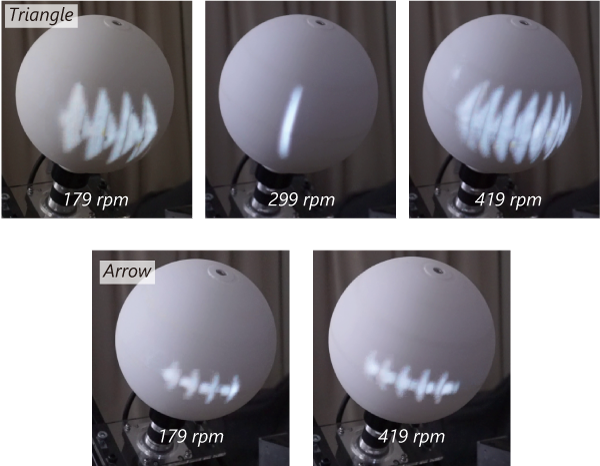
- 球体姿勢に対応した回転相殺テクスチャの高速投影の残像効果による一軸回転可視化法の提案
〇三河 祐梨(東京大学)、末石 智大(東京大学)、石川 正俊(東京大学) - 近年,空間型拡張現実ディスプレイにより運動情報を空間的かつリアルタイムに提示し,人間への直感的なスポーツ教示を試みる研究が活発である.しかし,回転情報のリアルタイム提示にあたって,推定の精度と速度のトレードオフの問題があった.そこで本研究は,回転相殺テクスチャの姿勢変化対応の高速投影の残像効果による,球体の1軸回転の図形的な可視化手法を提案する.実機投影による評価により本提案の妥当性が確認された.
- 2G-7
-
- ⻭科インプラント治療におけるAR式サージカルガイドの開発 -マーカの認識精度を向上させる環境の調査-
〇安黒 翔(東京理科大学大学院 工学研究科 情報工学専攻)、加納 徹(東京理科大学 工学部 情報工学科)、竹林 晃(医療工学研究所)、赤倉 貴子(東京理科大学 工学部 情報工学科) - ⻭科治療におけるインプラントとは、失った⻭の部分に埋め込む人工の⻭根のことである。インプラントを埋め込む手術を行う際には位置・深さ・角度を正確に合わせる必要がある。本研究では⻭列とコントラをAR認識することで位置情報を取得し、手術を補助するAR式サージカルガイドを開発する。現状の課題は、環境によってAR認識が安定しないことである。この安定度を可能な限り高め、手術へ応用が可能となる環境を調査する。

- 2G-8
-
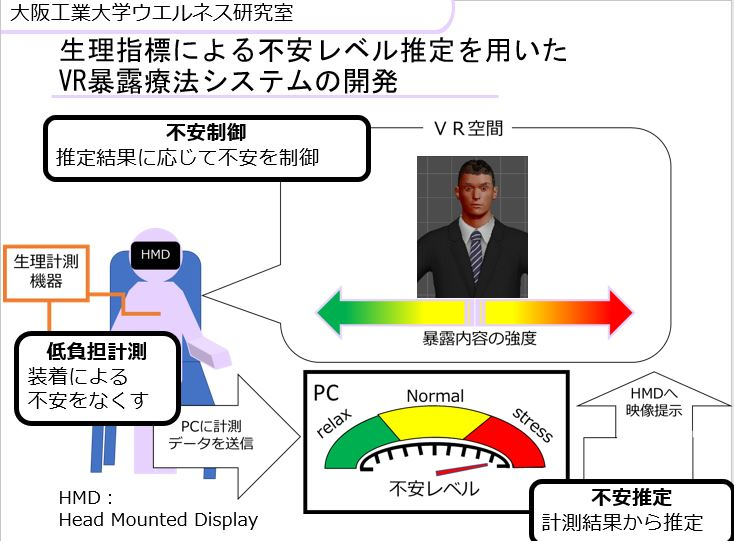
- 生理指標による不安レベル推定を用いたVR暴露療法システムの開発
〇木場 晏也(大阪工業大学大学院 ロボティクス&デザイン工学研究科)、大須賀 美恵子(大阪工業大学 ロボティクス&デザイン工学部) - 社交不安症の治療法としてVirtual Reality(VR)を用いた暴露療法がある.治療者が患者の暴露体験(VRコンテンツ)を共有し,制御できることがVR導入の利点である.我々は,生理指標を用いて推定した不安レベルに応じてコンテンツを変更するVR暴露療法システムを提案し,プロトタイプを開発した.本報では,これを用いて模擬面接実験を行い,実験参加者の不安レベル制御の可能性を検討した結果を報告する.
- 2G-9
- 三代目MRピタゴラ兄妹 with RV-XoverKit ~エデュテインメント作品制作に適したツールの利用例~
〇福田 裕美(立命館大学 情報理工学部)、敷島 歩(立命館大学大学院 大学院情報理工学研究科)、石田 隼也(立命館大学大学院 大学院情報理工学研究科)、木村 朝子(立命館大学 情報理工学部)、田村 秀行(立命館大学 総合科学技術研究機構)、柴田 史久(立命館大学 情報理工学部) - 複合現実感(MR)の導入により,エデュテインメント作品を独創性に富んだものすることが期待できる.筆者らは,現実空間・仮想空間の相互遷移や両空間でトリガーをかけ合う機能を実現するツールキットRV-XoverKitの提供により,作品制作者の創造力を発揮しやすくすることを目指している.その利用事例として,現実空間と仮想空間を往き来する体験型デモ作品を制作したので,その動作の模様を技術展示する.

- 2G-10
- 簡易没入型VR歩行システムを用いた地面傾斜の知覚評価
〇森崎 慶人(広島市立大学大学院情報科学研究科)、脇田 航(広島市立大学大学院情報科学研究科) - ボタン操作によるVR空間の移動方法は実際の歩行とは異なり,VR酔いの原因となる.これらの問題を解決するには歩行装置が必要だが,従来,トレッドミル型や足踏み型等,様々な方式が研究開発される中,我々は進行方向に大腿部を支持することで歩行感覚を錯覚させる手法を提案している.しかし,提案装置を用いて傾斜を含む歩行移動の際に,どれ程の臨場感があるかが明確でないため,本研究ではこれらについて主観評価実験を行う.

- 2G-11
-
- VR/AR手術機器ミュージアムにおける手術教育
〇藤原 道隆(名古屋大学大学院医学系研究科 メディカルxRセンター)、桜井 麻奈美(名古屋大学大学院医学系研究科 メディカルxRセンター)、岩本 朗(リキッドデザイン株式会社) - 当センターは,シミュレーション医療教育,研究,診療支援の施設である.中核であるSimサージ&ギャラリーは,1990年代から急激に発展した内視鏡手術機器を中心としたミュージアムの中に,手術VRシミュレータを配置するユニークな構造である.各種の手術セミナーを行ってきたが,昨年からCovid-19感染のため,可能な限り遠隔にシフトした.ミュージアムをバーチャルミュージアムとしてwebでアクセス可能とし,機器の3D表示化も着手した.
