Monday, 13 September
9月13日
一般発表 13:00-14:20 触力覚(触知覚・非接触)
座長:永野 光(神戸大学)
- 2E2-1
-
- 柔軟物体から想起されるオノマトペと物性の関連性の予備的検討
〇金田 実久(電気通信大学 情報理工学研究科)、竹内 将大(電気通信大学 情報理工学研究科)、金子 征太郎(電気通信大学 情報理工学研究科、日本学術振興会)、梶本 裕之(電気通信大学 情報理工学研究科) - 日本語ではオノマトペを用い,肌の状態や触り心地を表現する.本論文では,オノマトペと柔軟な物体の物性の関連性の明確化を目的とする.12種類のゲルの触り心地をオノマトペで表現し,オノマトペの出現範囲と出現数からオノマトペと物性の関連の考察を行う.また,ゲルを触る条件(視覚・触覚・視触覚条件)で想起されるオノマトペに違いがあるか検証を行う.

- 2E2-2
-
- 触覚遅延フィードバックによるセルフタッチ錯覚
〇齋藤 五大(東北大学 大学院文学研究科)、樋田 浩一(東京大学 大学院総合文化研究科) - セルフタッチ錯覚は閉眼の参加者が一方の手で偽の手に触れると同時にもう一方の手を他者に触れられると,自分で自分の手に触れたと感じる錯覚である。本研究の目的は,接触センサーと振動モーターを用いてセルフタッチ錯覚が生起するまで時間窓を調べることであった。実験の結果は,センサーの押下からモーターの振動までの遅延時間が128ミリ秒から378ミリ秒の間でその錯覚の強度が減衰し得ることを示した。

- 2E2-3
-
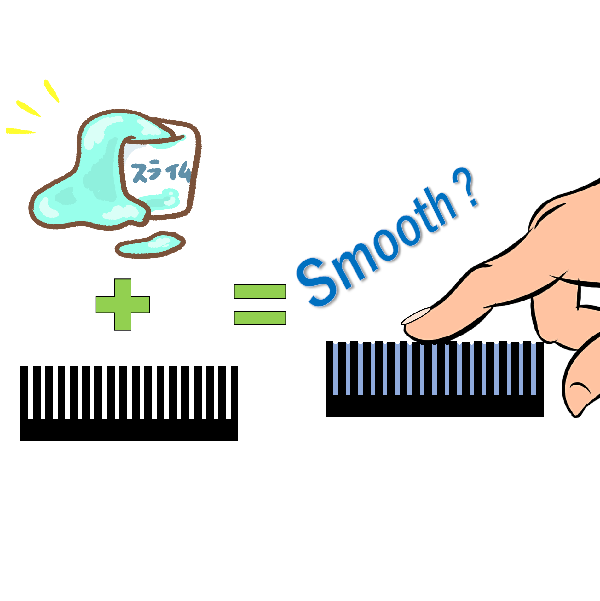
- スライムにピンアレイを刺突することによる表面凹凸の変化が平滑感知覚に与える影響
〇高見 太基(電気通信大学)、齋藤 大雅(電気通信大学 大学院情報学専攻)、亀岡 嵩幸(電気通信大学 大学院情報学専攻/日本学術振興会)、梶本 裕之(電気通信大学 大学院情報学専攻) - 周期構造をもつ表面は液体や固体などに対して摩擦感や非吸着感などの機能を有することが知られている.我々はスライムにピンアレイを刺突すると表面の凹凸が変化し,平滑感が変化することを発見した.本研究はこの知見に基づき,スライムとピンアレイを用いて平滑感を変調可能なデバイスを開発する.本稿では特にピンの刺突高さの変化によるスライム表面での平滑感の変化について調査した.
- 2E2-4
-
- Generative Adversarial Network におけるラベル合成の割合変化による生成された触覚情報の変化
〇笠井 惇矢(熊本大学大学院 自然科学教育部)、石丸 嵩也(熊本大学大学院 自然科学教育部)、嵯峨 智(熊本大学大学院 自然科学教育部) - 我々はこれまで既存の触覚情報から Generative Adversarial Network により新規の触覚情報を合成し,中間的な特徴をもつ触覚情報のリアリティを実験を通じて検証してきた.今回はこの手法を用いて,2つの触覚情報のラベル割合をさまざまに変化させた触覚情報を生成し,参照した触覚情報の特徴が生成結果に反映される割合の変化を評価する.
- 2E2-5
-
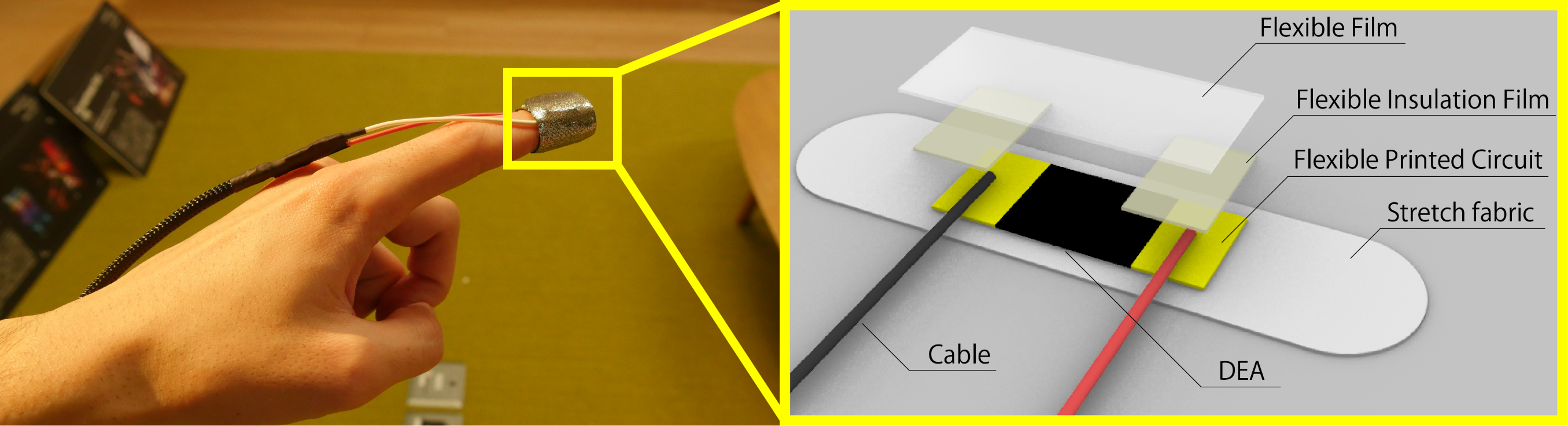
- 触覚的アニマシーのための柔軟・薄膜な触覚ディスプレイの基礎検討
〇黒木 帝聡(豊田合成株式会社、慶應義塾大学大学院メディアデザイン研究科)、米原 悠二(豊田合成株式会社)、Peiris Roshan(Rochester Institute of Technology)、藤原 武史(豊田合成株式会社)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 本稿では触覚刺激に基づいて知覚される生物らしさを触覚的アニマシーと定義し,その触覚的アニマシーの強化を目指した触覚ディスプレイとして,Dielectric Elastomer Actuator を用いた柔軟・薄膜な触覚ディスプレイを提案する.構築した触覚ディスプレイを用いて触覚刺激に基づくアニマシーの知覚実験を行った結果,本触覚ディスプレイが触覚的アニマシーを強化する可能性が示唆された.
- 2E2-6
-
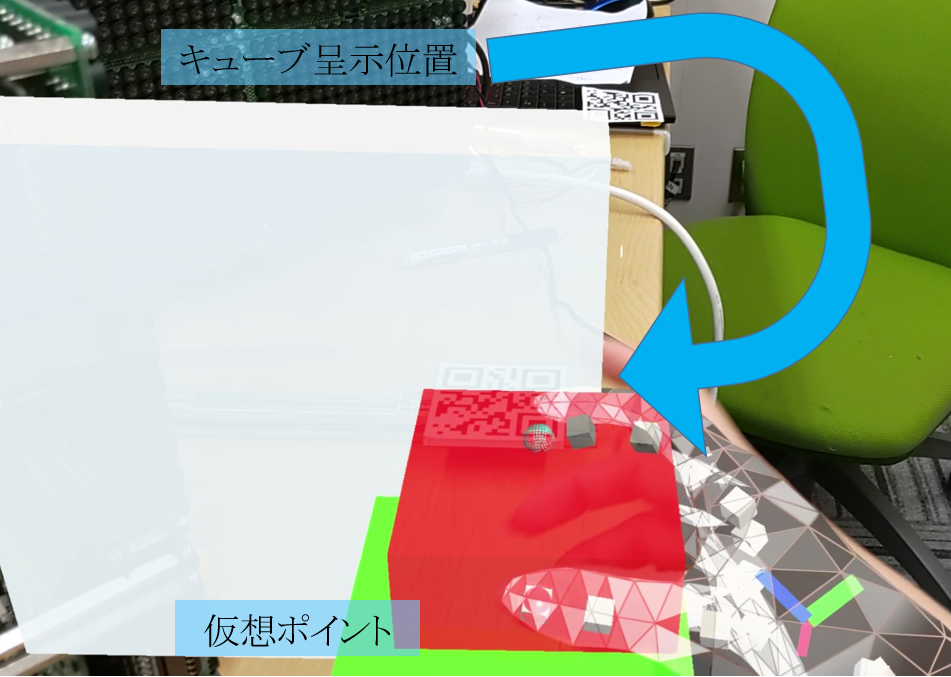
- 遮蔽された仮想物体への触覚付与による操作性検討
〇和田 莉奈(東京大学 新領域創成科学研究科)、下村 光彦(東京大学 情報理工学系研究科)、水谷 沙耶(東京大学 情報理工学系研究科)、藤原 正浩(東京大学 新領域創成科学研究科)、牧野 泰才(東京大学 新領域創成科学研究科)、篠田 裕之(東京大学 新領域創成科学研究科) - 遮蔽された仮想物体の操作性向上において,触覚フィードバックが有用であることはすでに確認されている.しかしながら,触覚フィードバックが補っている視覚情報の詳細はまだ解明されていない.そこで本稿では,HMDと非接触型触覚デバイスを用いて,触覚フィードバックが遮蔽物体の操作性に与える影響を検証し,触覚情報により補うことができる視覚情報について,厚み情報と呈示位置の観点から検討した.
- 2E2-7
-
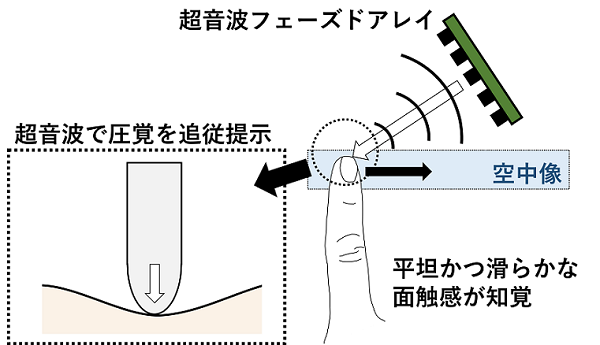
- 集束超音波による圧覚点の指先追従に基づく静的面触感の空中提示
〇森崎 汰雄(東京大学新領域創成科学研究科)、藤原 正浩(東京大学新領域創成科学研究科)、牧野 泰才(東京大学新領域創成科学研究科)、篠田 裕之(東京大学新領域創成科学研究科) - 集束超音波は非接触に触覚を提示できる。超音波で物体表面の触感を再現する場合、基本要素として一様で滑らかな(振動のない)静的面の触感が必要となる。静的面で物体との接触感が再現でき、さらに振動を重畳すれば様々な物体の触感再現が実現する。従来の超音波による面提示はいずれも振動を伴う。本研究ではまず超音波の刺激点を細かく周期移動させ圧覚を提示する。その圧覚点を指先に追従させることで静的面の触感を提示する。