Sunday, 12 September
9月12日
一般発表 16:00-17:20 行動・認知
座長:大倉 典子(芝浦工業大学)
- 1C3-1
- The Proteus Effect in Augmented Reality: Impact of Avatar Age and User Perspective on Walking Behaviors
〇Riku Otono(Nara Institute of Science and Technology)、Yusuke Shikanai(DeNA Co., Ltd.)、Kizashi Nakano(Nara Institute of Science and Technology)、Naoya Isoyama(Nara Institute of Science and Technology)、Hideki Uchiyama(Nara Institute of Science and Technology)、Kiyoshi Kiyokawa(Nara Institute of Science and Technology) - 本研究では,3人称視点を用いたARデバイスによる拡張現実空間におけるプロテウス効果の再現と検証を行う.プロテウス効果は,アバターの見た目によってユーザの態度や行動が変容する心理効果として知られ,心的障害や社会問題の解決に寄与する可能性が考えられる.本研究で用いる3人称視点は,アバターの見た目を常時俯瞰することを可能とするため,1人称視点と比較し持続性の高いプロテウス効果の起因が期待される.

- 1C3-2
-
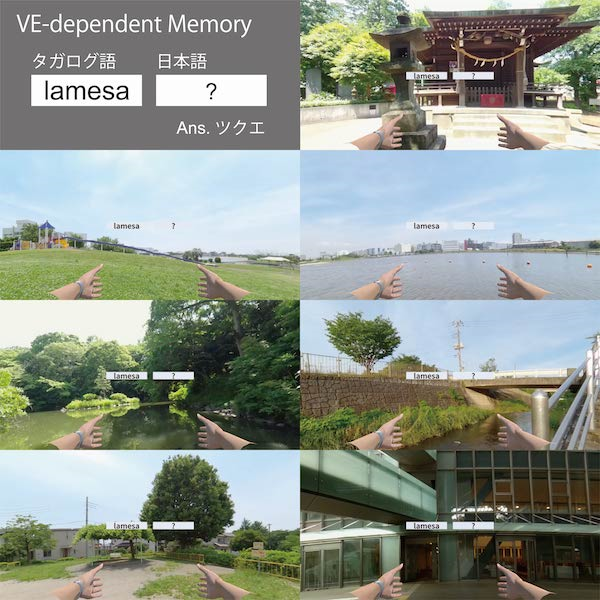
- 360度動画VRを用いた環境的文脈操作が対連合学習に与える影響
〇瑞穂 嵩人(東京大学大学院 情報理工学系研究科)、鳴海 拓志(東京大学大学院 情報理工学系研究科)、葛岡 英明(東京大学大学院 情報理工学系研究科) - 学校で習った内容を自宅や図書館で復習するといったように、環境を様々に変えながら学習を行うと記憶の定着が促進される。本研究では、360度動画で構成した7つの相異なる実写VR環境を用いて、多様なバーチャル環境下での学習体験を与えることでも、同様の記憶定着効果が生起するか検証する。同時に、現実での体験と同様に、学習時と同一の環境下では想起成績が向上するという記憶の環境的文脈依存性が見られるか検証する。
- 1C3-3
-
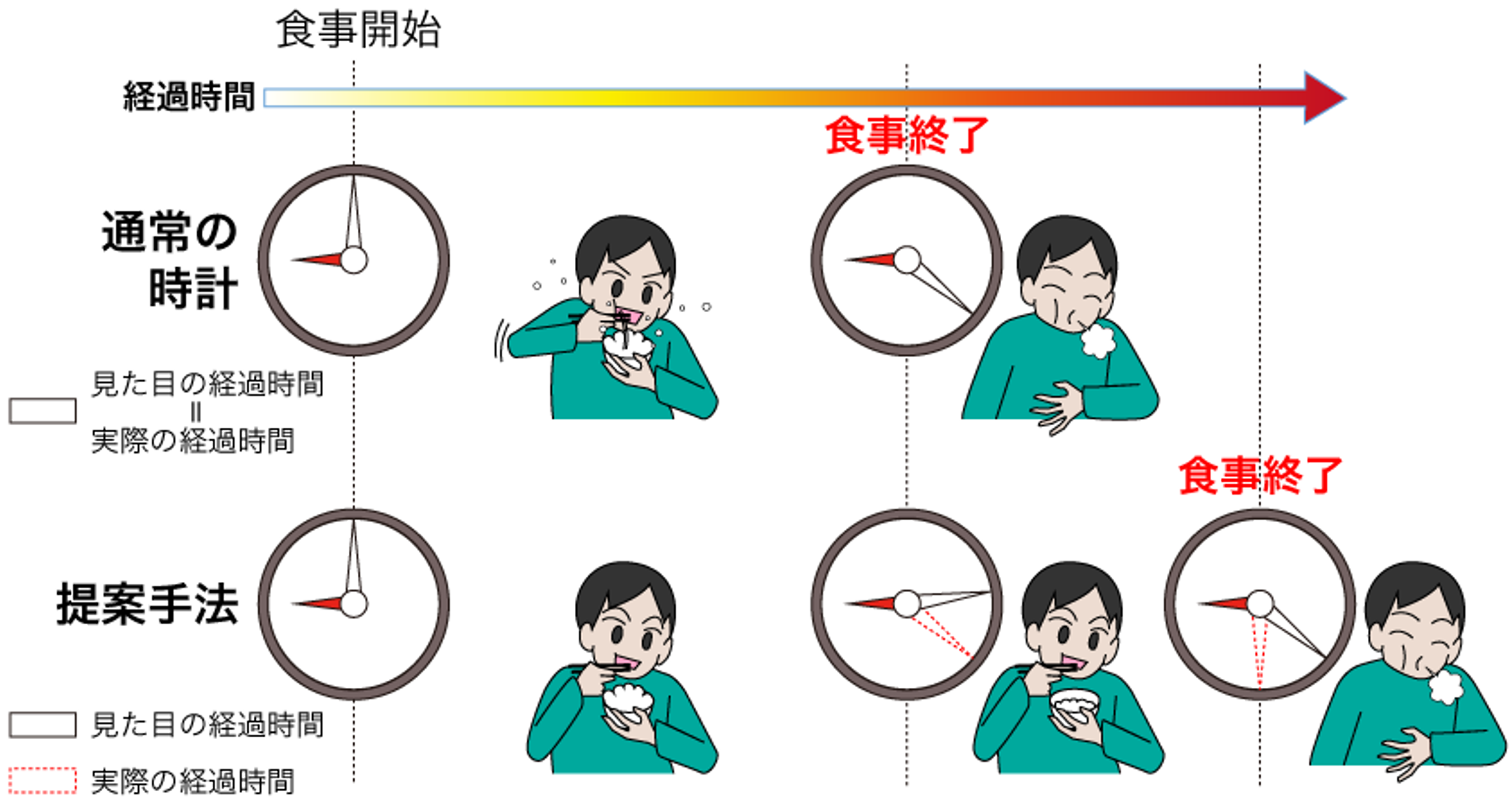
- 時計の運針速度が摂食速度に与える影響の検証
〇櫻井 翔(電気通信大学)、華 青(電気通信大学)、伴 祐樹(東京大学大学院)、野嶋 琢也(電気通信大学)、広田 光一(電気通信大学) - 早食いは世界的な健康問題である肥満や糖尿病の要因の1つである.早食いはゆっくり食べるという簡潔な方法で改善できるが,毎食時に摂食速度を意識することは容易ではない.一方,早食いの根本的な原因は未解明であり,工学的な改善手法はほとんどない.本稿では,視覚提示した時計の運針速度が無意識的な行動速度の変化をもたらす効果に着目し,早食いを防止する上で時計の運針速度制御による摂食速度の低減が可能かを検証した.
- 1C3-4
-
- 身体融合時の動的な寄与率制御による行為主体感向上
〇児玉 大樹(東京大学)、瑞穂 嵩人(東京大学)、畑田 裕二(東京大学)、鳴海 拓志(東京大学)、廣瀬 通孝(東京大学) - 身体スキルの定着には強い行為主体感を伴う練習が必要とされる.二者の動作の加重平均をアバタに反映させる融合身体は、教師の視点から動作を理解しつつ行為主体感を得られる学習方法として注目されている。本研究では、融合時の寄与率が低いユーザでも強い行為主体感を得ることを目指し、寄与率の動的制御を提案する.実験の結果,寄与率の高い状態から徐々に下げた場合、最初から寄与率が低い場合より高い行為主体感が得られた.
- 1C3-5
-
- MR 空間におけるわかりやすいインタラクションの検討
〇表 柚希(成蹊大学大学院理工学研究科理工学部)、梶田 悠(成蹊大学理工学研究科理工学部)、杉山 賢二(成蹊大学大学院理工学研究科理工学部)、山添 崇(成蹊大学理工学研究科理工学部) - 複合現実(Mix Reality, MR)では、人間の様々な動きを映像に反映し、映像からもリアクションを返すことでインタラクションが成り立つ。しかし、MR空間と現実の相互作用については未解明の部分が多く、直感的でわかりやすいインタラクションもいまだに解明されていない。本研究では、直感的にわかりやすいインタラクションの特徴と条件を明確化することを目的として、MR空間の人型オブジェクトの動作とアノテーションの関係を主観評価を用いて評価した。
- 1C3-6
-
- VRによる視点変換と言語教示がユーザの動作に及ぼす影響
〇笹木 海志(京都工芸繊維大学工学科学研究科)、西崎 友規子(京都工芸繊維大学工学科学研究科)、深田 智(京都工芸繊維大学工学科学研究科)、来田 宣幸(京都工芸繊維大学工学科学研究科) - 本研究では,仮想現実における「視点の変換」によって人間の思考や行動が変化する可能性があることに着目した.実験参加者には,「仮想現実内で視点が高くなる」体験をさせ,動作への影響を確認した.また映像の捉え方を統制するために言語教示として「巨大化」と「浮遊」の二通りの捉え方を与えた検討も行った.その結果,この2つの言語教示によって行動が異なる可能性があることが示唆された.

- 1C3-7
-
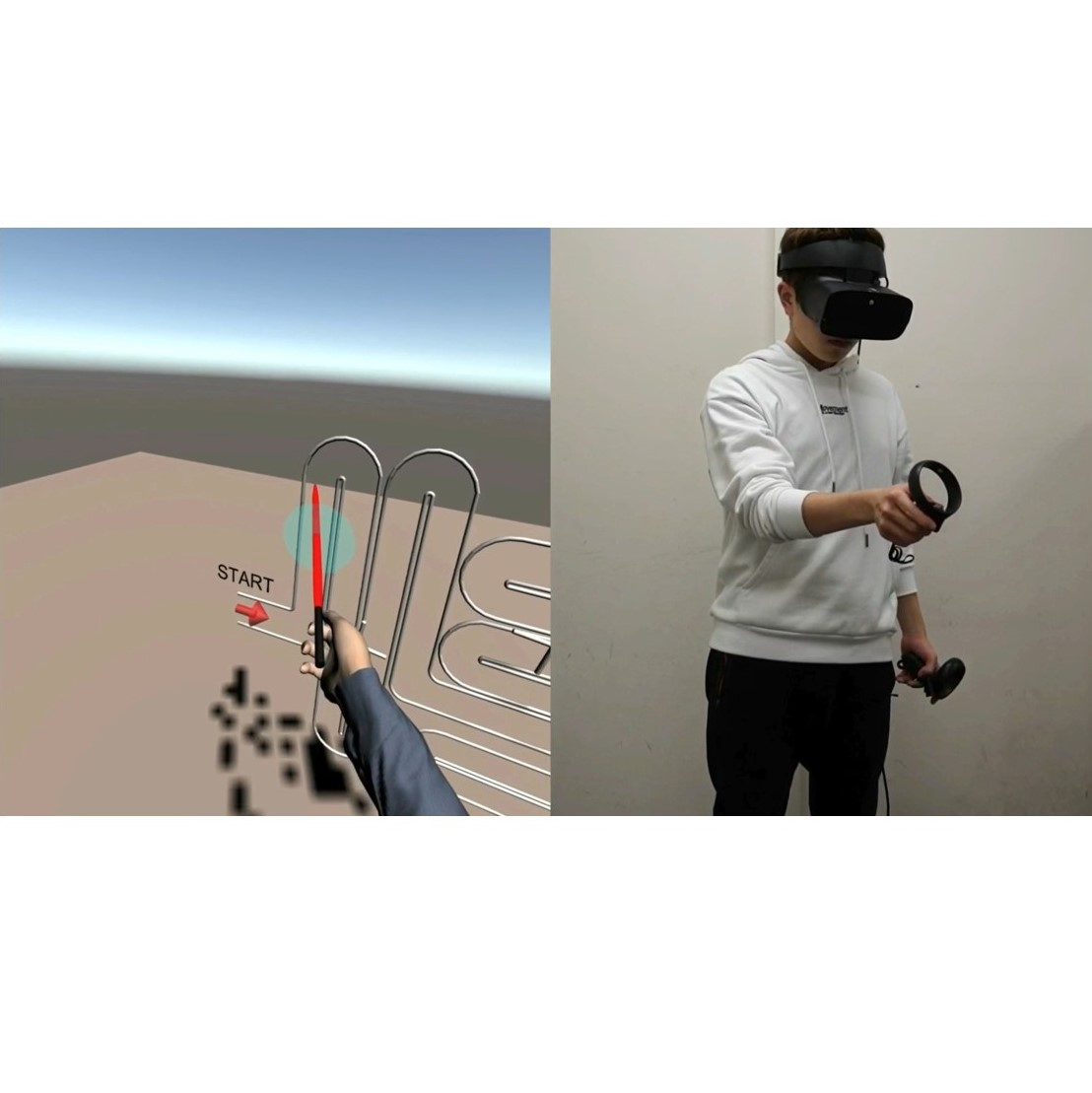
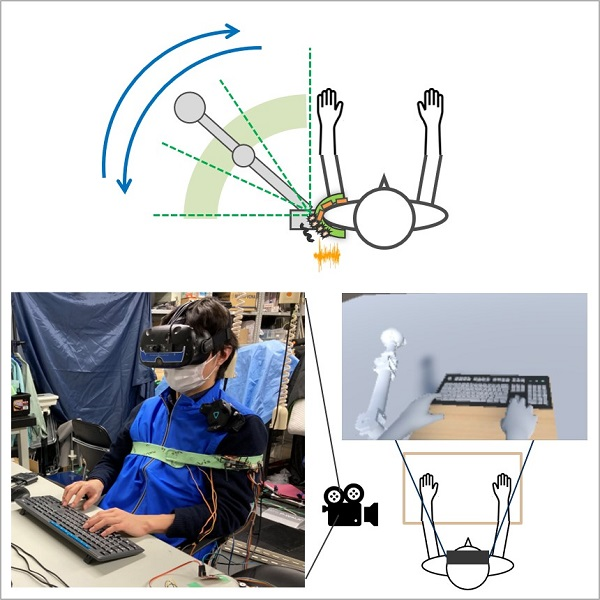
- 拡張身体の身体化に関する研究 -第一報:装着型ロボットアームの能動制御と手先方向提示による身体幅感覚への影響-
〇西田 野々香(早稲田大学創造理工学研究科)、岩崎 悠希子(早稲田大学創造理工学研究科)、加藤 史洋(早稲田大学創造理工学研究科)、Ganesh Gowrishankar(UM-CNRS Laboratoire d'Informatique, de Robotique et de Microelectronique de Montpellier (LIRMM))、岩田 浩康(早稲田大学創造理工学研究科) - 装着型の拡張身体ロボットアームの開発において,身体の幅・形が装着前と変わった状態であっても周囲と衝突しないように動き回れることが望ましい.ロボットを自分の身体として認識すれば身体幅感覚に介入できると考え,装着型ロボットへの身体性誘発の手法としてAgencyとOwnershipの誘発を目指した制御・フィードバックシステムを開発した.提案手法により身体幅の認識がロボットアーム側へ広がる可能性が示唆された.
- 1C3-8
-
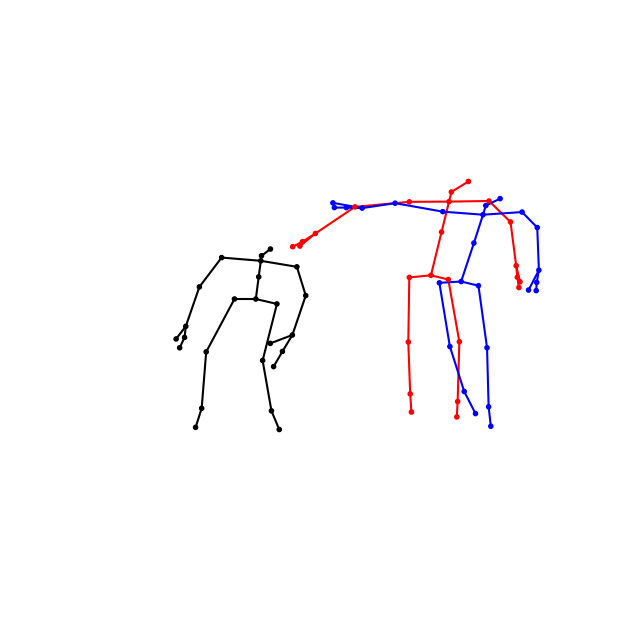
- 急な動作変更に頑健な予測器作成に向けた予測挙動評価と動作予測アルゴリズムの基礎的検討
〇板井 俊樹(東京大学新領域創成科学研究科)、砥出 悠太郎(東京大学新領域創成科学研究科)、牧野 泰才(東京大学新領域創成科学研究科/JST さきがけ)、篠田 裕之(東京大学新領域創成科学研究科) - VR空間内でアバタを表示する際に生じる描画遅れを解消するために, 動作を予測し表示する手法が提案されている. 既存の手法では急な動作変更を行った場合,予測軌道が不連続に変化し, 違和感が生じる.この問題解消のため,予測誤差の小さいアルゴリズムの確立が必要と考えた.本稿では現在の予測方法における急な動作変更時の挙動を詳細に確認し,また既存の動作予測モデルを改良することで,予測精度を向上できるかを検証した.