Sunday, 12 September
9月12日
一般発表 13:00-14:20 教育
座長:柳田 康幸(名城大学)
- 1C2-1
-
- 日米学生によるバーチャルロボット設計・開発・感性評価PBLの設計と実施
〇大倉 典子(芝浦工業大学 SIT 総合研究所)、ラオハカンワンウィット ティポーン(芝浦工業大学 工学部)、スリーピァン ピーラヤー(芝浦工業大学 工学部)、菅谷 みどり(芝浦工業大学 工学部)、千葉 浩子(DePauw University)、バーク デイブ(DePauw University) - 芝浦工業大学とアメリカのDePauw大学は、"Involving Undergraduates in research on Design and Cross-Cultural Perceptions of Cuteness in Robotic Gadgets"と題する共同研究を行っており、その一環で、アメリカの学生が来日して芝浦工大の学生と7週間の共同作業を行うプログラムを実施している。昨年、今年と、バーチャルな来日となったが、そこでバーチャル空間で印象の異なるロボットを制作するプログラムを実施した。印象の違いは脳波と心拍で評価した。ここでは、そのプログラムの設計と実施について紹介する。

- 1C2-5
-
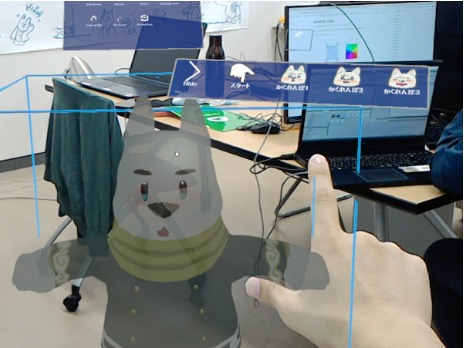
- 日米学生によるバーチャルロボットの感性評価PBLの経験
〇井村 舜(芝浦工業大学 大学院理工学研究科)、大倉 典子(芝浦工業大学 SIT 総合研究所)、ラオハカンワンウィット ティポーン(芝浦工業大学 工学部)、スリーピァン ピーラヤー(芝浦工業大学 工学部)、菅谷 みどり(芝浦工業大学 工学部)、千葉 浩子(DePauw University)、バーク デイブ(DePauw University) - 芝浦工業大学とアメリカのDePauw大学は、Unityを利用したバーチャルロボットの感性評価に関する共同研究を行っている。昨年はロボットの開発とSD法による主観評価を行ったが、今年はそれらに加え、生体情報を用いた客観評価も行った。
ここでは、参加者とTA(Teaching Assistant)の両方の観点から、プロジェクトでの経験について紹介を行う。
- 1C2-2
-
- 屋外歴史遺産展示施設におけるXRを用いた教材コンテンツの開発
〇中村 隆敏(佐賀大学 芸術地域デザイン学部)、天賀 光広((株)とっぺん) - 現実と仮想空間を融合する遺産・遺跡等展示用AR,MR教材の開発を行っている中で、屋内用展示と屋外用展示コンテンツのあり方や融合の方策など現状の課題から見えてくる課題と解決策を論考する。
- 1C2-3
-
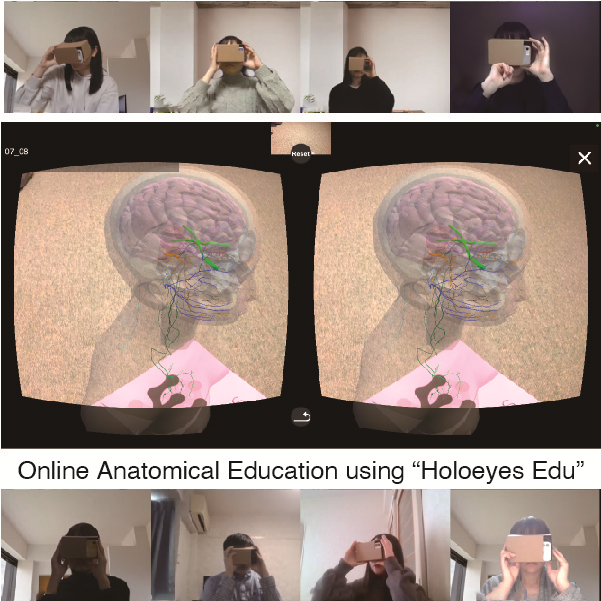
- 看護学部におけるARアプリ【HoloeyesEdu】を用いたオンライン解剖生理学演習
〇本間 典子(国立看護大学校 生命科学) - コロナ禍において、解剖体見学等の実習や模型を用いた対面講義が中止となり、看護学部の解剖生理学教育では人体を立体的に学ぶ機会が失われた。そこで本学では、2021年12月にリリースされたARアプリ【HoloeyesEdu】を学生全員のスマートフォンにインストールし、人体を立体視するオンライン解剖生理学演習を行った。その結果、回を追うごとに学生のアプリの活用効率や対話頻度が高まり、オンライン演習の効果が高まったので紹介する。
- 1C2-4
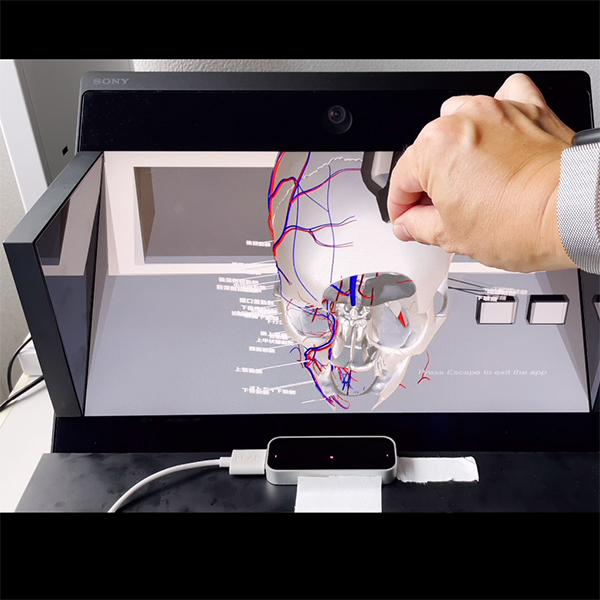
- 裸眼立体視が可能な空間再現ディスプレイの解剖学教育における実用
〇板宮 朋基(神奈川歯科大学歯学部総合歯学教育学講座)、東 雅啓(神奈川歯科大学歯学部解剖学講座口腔解剖学分野)、小口 岳史(神奈川歯科大学歯学部解剖学講座解剖学分野)、松尾 雅斗(神奈川歯科大学歯学部解剖学講座口腔解剖学分野) - 空間再現ディスプレイ(SONY, ELF-SR1)は、内臓カメラを用いて体験者の顔の位置を高速度で認識し、裸眼立体視を可能にする。本研究では空間再現ディスプレイ用の解剖学教育アプリを開発した。頭頸部の骨格と血管の3D-CGモデルを立体表示でき、回転・拡大縮小や動脈のみの表示等の操作が容易にできる。本アプリを解剖実習中の歯学部2年生104名が体験し、アンケート調査の結果、本手法の有用性が示唆された。
- 1C2-6
-
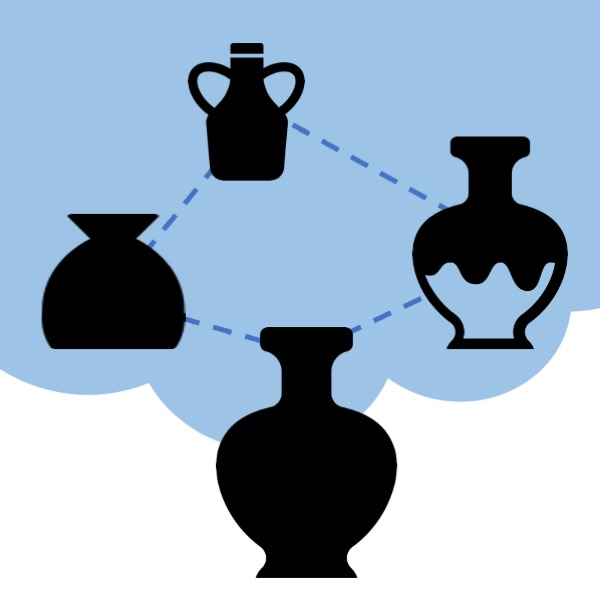
- 深層学習による物体検出のパラメータから算出した類似度を用いた博物館における展示手法
〇小嶺 愛紀菜(琉球大学理工学研究科)、赤嶺 有平(琉球大学工学部)、根路銘 もえ子(沖縄国際大学経済学部) - 筆者らは拡張現実技術や深層学習を用いた展示手法によって来館者の理解をより深めることや興味関心の向上を目的としたシステムを開発している.博物館には多数の展示物があり,来館者にとってそれら展示物同士の形状や模様等の細かな類似点,共通点を一度の見学で把握することは難しい.そこで深層学習モデルを活用し来館者が見ている展示物と類似した展示物を提示し展示物同士の関連性を見いだしやすい展示手法を提案する.
- 1C2-7
-
- MR技術を用いた採血訓練シミュレータ開発のための刺入角度のリアルタイムフィードバック機能の検討
〇伊藤 晶(秋田大学大学院理工学研究科)、齋藤 正親(秋田大学大学院理工学研究科)、菊地 由紀子(秋田大学大学院医学系研究科)、工藤 由紀子(秋田大学大学院医学系研究科)、佐々木 真紀子(秋田大学大学院医学系研究科)、藤原 克哉(秋田大学大学院理工学研究科)、水戸部 一孝(秋田大学大学院理工学研究科) - 本研究では,看護師養成課程の学生が十分な採血技術を修得でき,且つ効率よく訓練できるMR技術を用いた採血シミュレータの実現を目的としている.本報告では,手本として看護師養成課程の教員の採血時のシリンジの動きを立体映像としてHMDで観察するシステムを構築すると共に,手本に対する学習者の注射器の角度差をリアルタイムで表示する機能を実装し,その機能が学習者の手技に及ぼす影響を検討した.

- 1C2-8
-
- 認知リハビリテーション領域に適用できるVRを用いた主体感を付与した視行動誘導手法の提案
〇金子 宗平(東京大学)、衛 然(東京大学)、中村 美緒(東京大学)、檜山 敦(東京大学)、水野 純平(京都大学)、二瓶 美里(東京大学) - 動機付けはリハビリテーションの長期的な効果を決定する重要な要因である.運動領域のリハビリではVRを用いて主体感を持たせることで動機づけを行う方法が提案されているが,認知領域でのリハビリでは同様の手法は提案されていない.本研究では,認知領域のリハビリに対して,非明示的な視線行動手法であるリダイレクションとSDoFを実装した無誤学習VRシステムを提案した.その結果,SDoFはタスクの成績と動機付けを向上させた.