Friday, 18 September
2020/9/18(金)
一般発表 9:00-10:20 歩行・移動
座長:古川 正紘(大阪大学)
- 3C1-1
-
- バーチャルな歩車混在空間における外向けHMI評価実験システム
〇児玉 拓郎(筑波大学)、矢野 博明(筑波大学) - 歩車混在空間において人や車両の安全快適な移動を支援するための外向けHMIの研究が行われている.現状では人と車を十分離して実験が行われており実利用と乖離している.本研究では球面ディスプレイ搭載型のゴルフカーが走行する車両走行空間とHMDをつけて歩行する歩行者空間を物理的に別々に作り,バーチャル空間で統合することで,実際に近い歩車間距離での行動を評価可能な環境を構築し,評価実験により有効性を検証した.

- 3C1-2
-
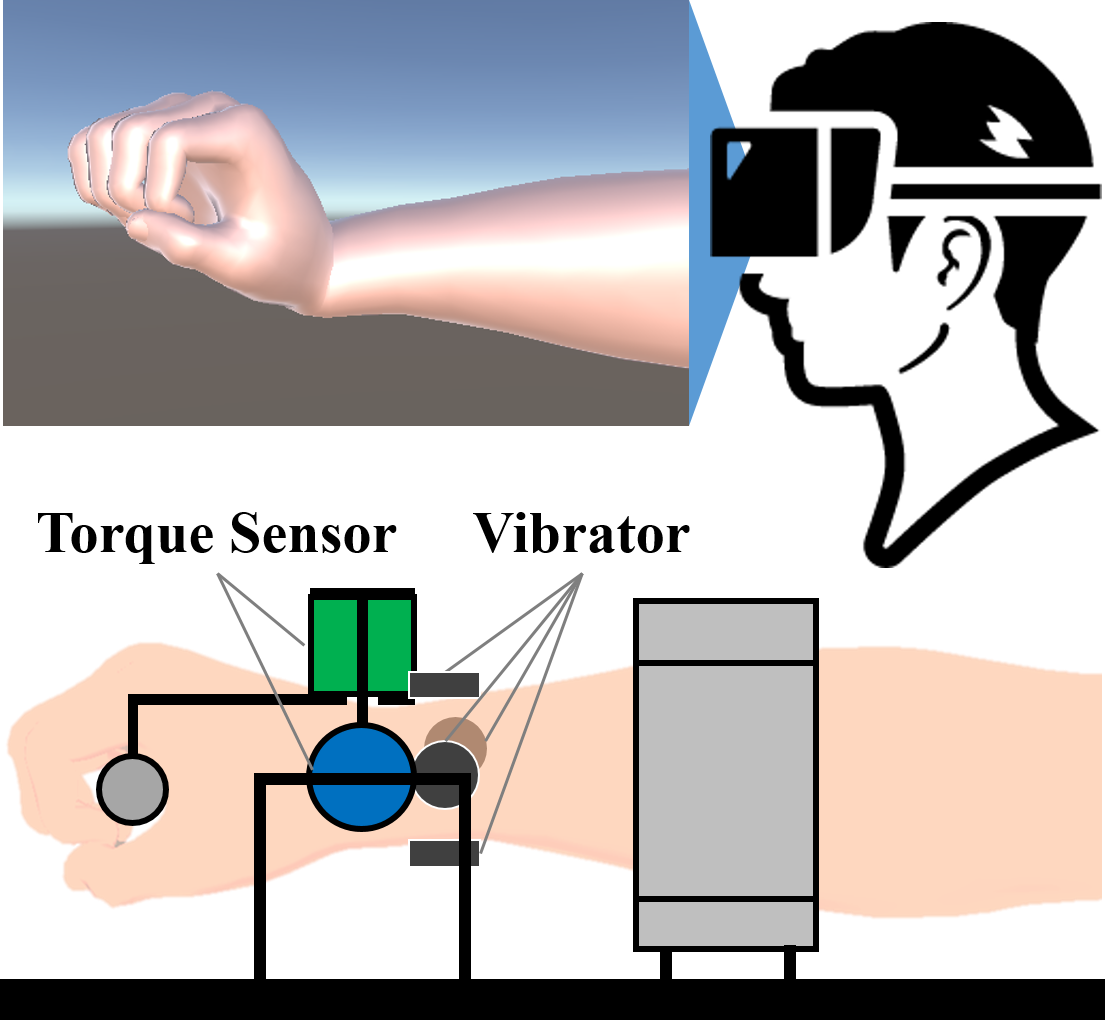
- Motion-Less VRの研究:二軸性関節における運動意図の取得に向けた基礎開発
〇望月 典樹(法政大学)、中村 壮亮(法政大学) - リアル身体での運動を必要としない身体没入型VRシステム「Motion-Less VR」は,身体固定状態における運動意図の取得と感覚情報の提示で実現される.先行研究では,システムの概念提案を行い,示指三関節の屈伸運動において一軸性の実装例を示した.本稿では部位拡張の一環として,手首の掌背屈・橈尺屈運動の意図を取得する装置を開発し,二軸性関節におけるMotion-Less VRの実現可能性を検証する.
- 3C1-3
-
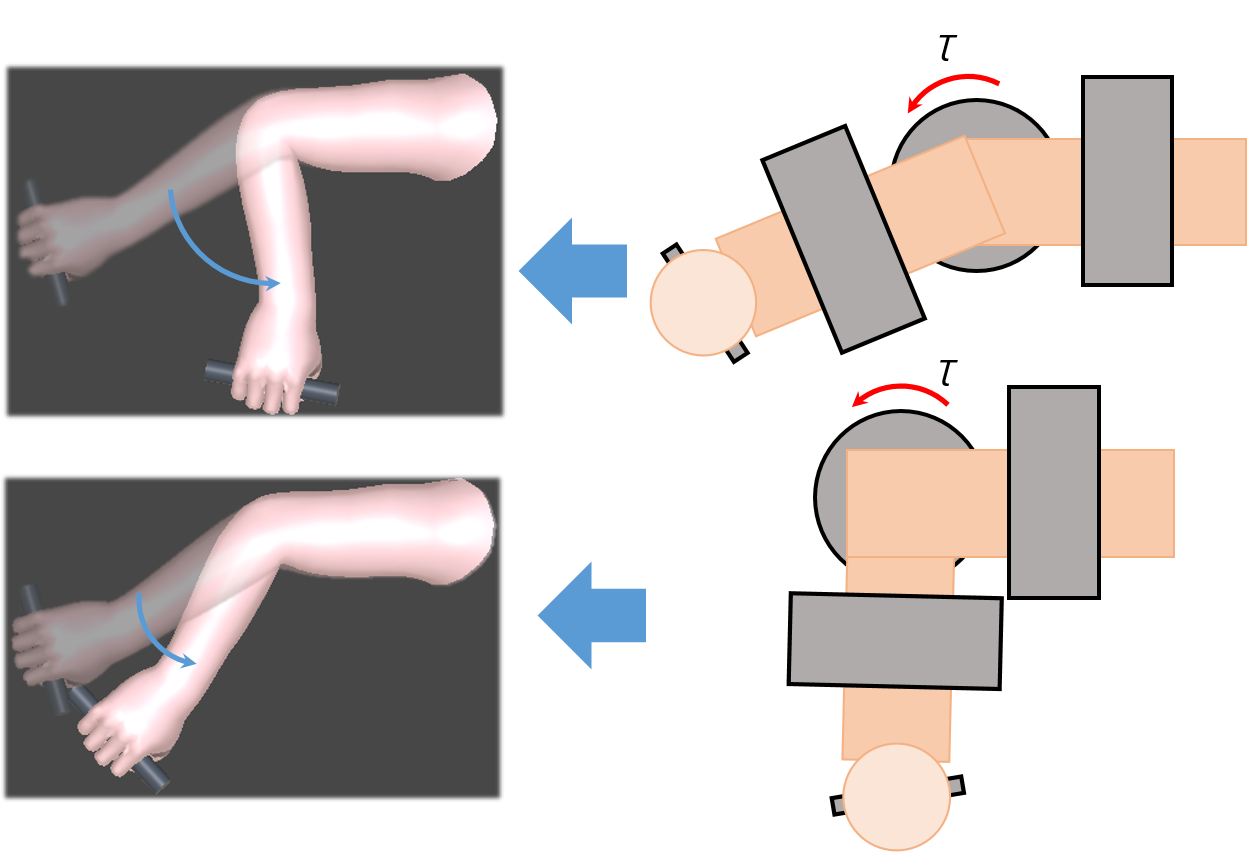
- Motion-Less VRの研究:リアル身体とバーチャル身体の姿勢相違を考慮した運動意図取得手法に関する基礎検討
〇今永 尚志(法政大学)、望月 典樹(法政大学)、大谷 拓也(早稲田大学)、中村 壮亮(法政大学) - リアル身体での運動を必要としない身体没入型VRシステム「Motion-Less VR」では,任意の姿勢で身体が固定された状態において発揮された関節トルクを基に,バーチャル身体の運動が実現される.ここで,リアル身体の姿勢と発揮トルクには依存関係があるうえ,リアル身体とバーチャル身体の姿勢は異なることとなるが,先行研究では考慮されていない.そこで本研究では,姿勢に応じた発揮トルクの補正手法の検討を行う.
- 3C1-4
-
- 現実空間の物体分布と人の行動特性を反映したVR空間のリアルタイム構築
〇松尾 直紀(関西学院大学)、井村 誠孝(関西学院大学) - 本研究では,あらゆる現実環境でVR体験を可能とすることを目標として,距離カメラから現実空間の障害物位置を計測し,同じ位置にVR空間でもバーチャル物体を設置することで,現実空間の物体分布を反映したVR空間をリアルタイムに構築する.人が実物体同様にバーチャル物体を回避するか定かではないため,バーチャル物体に対する人の回避行動の特性について実物体に対する行動と対比して調査し,得られた知見に基づいて実装する.

- 3C1-5
-
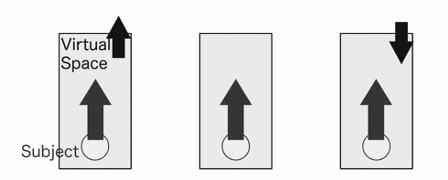
- 実空間歩行における視覚刺激の速度操作と歩行速度変化の関係性
〇谷崎 充(東京大学)、松本 啓吾(東京大学)、葛岡 英明(東京大学)、雨宮 智浩(東京大学)、廣瀬 通孝(東京大学) - トレッドミル歩行中の歩行速度は,オプティカルフロー(OF)変調により変化することが報告されている。一方で、空間移動を伴う歩行では得られる視覚情報、前庭系情報、体性感覚情報が異なり、その寄与の割合が異なる可能性がある。そこで、本研究では実空間を歩行中にHMDを用いてOFを変化させた映像を提示し、歩行速度の変化を調べた。その結果,実空間での歩行速度も先行研究同様、視覚情報によって変調される可能性が示唆された。
- 3C1-6
-
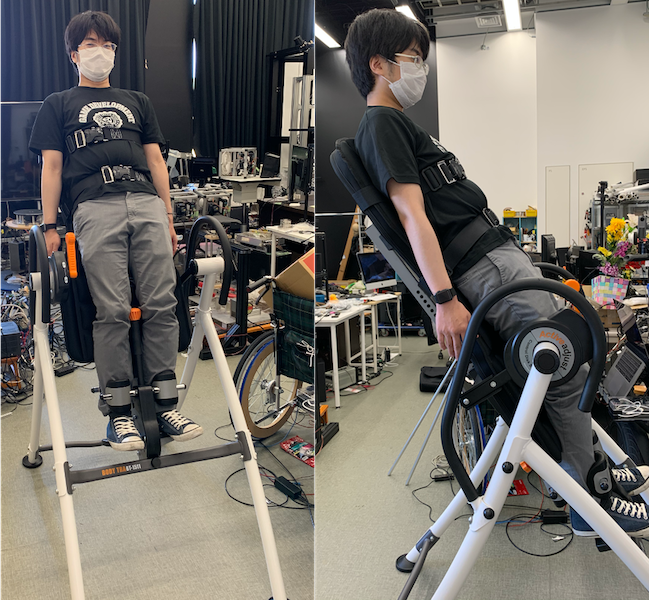
- 歩行感覚生成のための腕振り運動と身体姿勢に関する研究
〇末田 岳(東京都立大学大学院)、ヤェム ヴィボル(東京都立大学大学院)、雨宮 智浩(東京大学大学院)、北崎 充晃(豊橋技術科学大学大学院)、佐藤 誠(東京都立大学)、池井 寧(東京大学大学院) - 歩行VRにおいて,身体姿勢の変化が歩行感覚及び移動感覚に与える効果について調査した.本論文では,前傾,後傾姿勢にさせた体験者に対して腕振り運動提示を行い,歩行感覚と移動感覚について評価を行わせた.そして,評価結果から歩行感覚及び移動感覚が高くなるような身体姿勢について検討を行った.
- 3C1-7
-
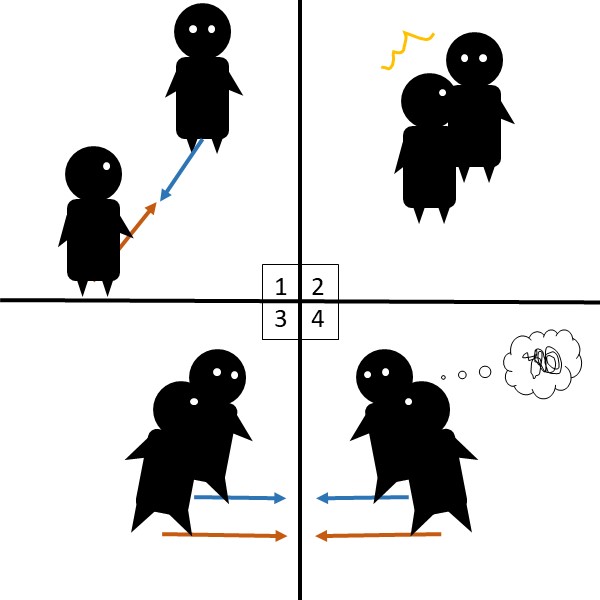
- 環境要因による連続回避本能の発生率
〇堤 琴里(奈良女子大学)、田村 祐一(甲南大学)、佐藤 克成(奈良女子大学) - 対向する歩行者が連続して同じ方向に避け合い, 共に前に進めなくなる現象のことを, 連続回避本能と呼ぶ. 本研究では連続回避本能のシミュレーションを作成し, 環境要因である人数, 道幅を変化させ, それに伴い変化する連続回避本能の発生率の違い・関係について定量評価を行う. さらに, 作成したシミュレーションの妥当性について議論する.