Thursday, 17 September
2020/9/17(木)
一般発表 13:00-14:20 視覚(デバイス)
座長:奥 寛雅(群馬大学)
- 2B3-1
-
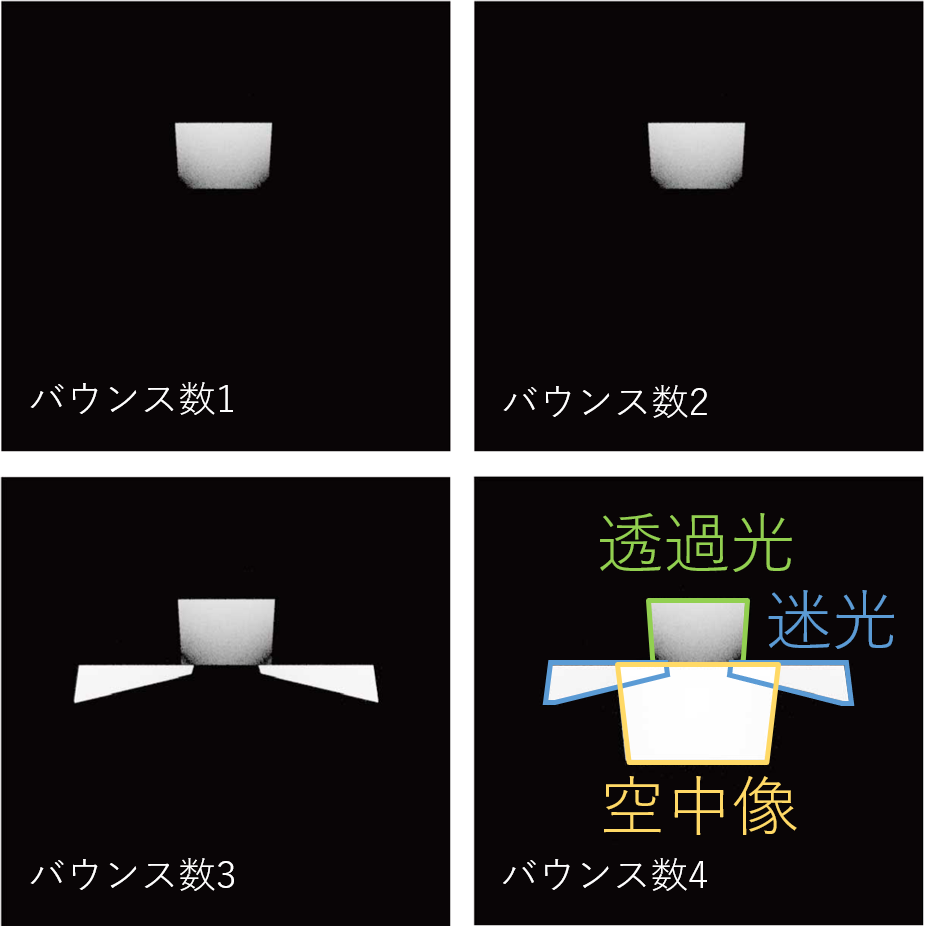
- 環境反射空中像装置において迷光を見せないための設計
〇星 彩水(電気通信大学)、木内 舜司(電気通信大学)、小泉 直也(電気通信大学) - 空中像装置において余計な光である迷光は空中像の視認性を下げる原因となっている.3DCGソフトウェアのblenderを用いて,光の反射回数の調整により迷光を検出することで空中像が迷光無しで見える範囲を求めた.この手法を用いて,既存の再帰透過光学素子の設置位置による空中像が迷光無しで観察可能な範囲の拡大を検討した.
- 2B3-2
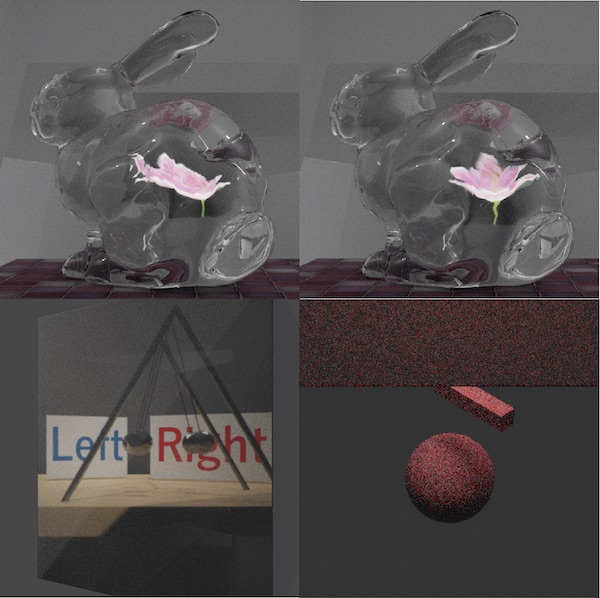
- 再帰透過光学素子を用いた光学系設計のためのレイトレーシング法によるシミュレーションの応用検討
〇木内 舜司(電気通信大学)、小泉 直也(電気通信大学) - 再帰透過光学素子の活用は,視域や迷光,光源サイズなどの検討のため,実際の光学系を組み立てる必要があり,多くの労力を要する.そこで,レイトレーシング法によるシミュレーションを検討する.再帰透過光学素子を用いた既存の光学系を再現し,その性質に対する追試をシミュレーション内で行った.実験の結果,シミュレーションの応用可能な場面と限界が判明した.
- 2B3-3
-
- FPGAプロジェクションマッピングシステムへの輝度補正機能の追加
〇永野 佳孝(愛知工科大学)、杉森 順子(桜美林大学) - プロジェクションマッピングの品質向上には,投影映像の正確な幾何補正に加えて,輝度や色相の補正が求められる.我々はFPGAを用いたプロジェクションマッピングシステムを開発しており,新たに輝度補正回路をFPGAに追加した.輝度補正は,複数台のプロジェクタを用いる場合において,投影映像の重なった部分を単一の映像のように滑らかにつなげるために必要な機能である.本稿では,FPGAでの補正回路の設計と補正機能の確認結果について述べる.
- 2B3-4
-
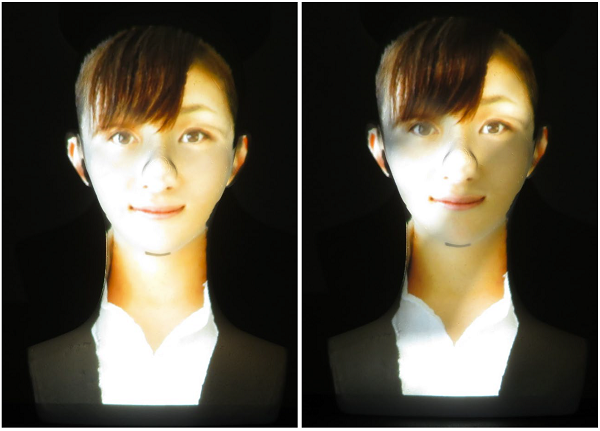
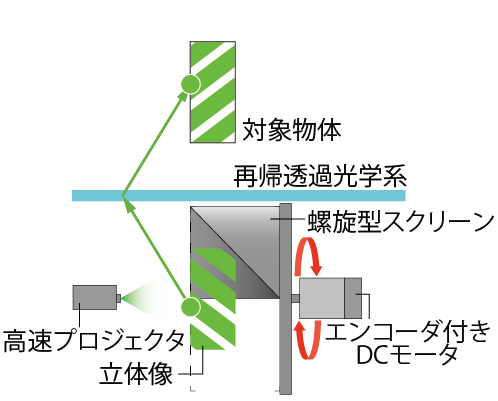
- Volumetric Displayによる立体像を光源としたプロジェクションマッピングの提案
〇清川 真純(電気通信大学大学院)、橋本 直己(電気通信大学大学院) - 我々は,動的プロジェクションマッピングにおいてProCamシステムを視覚的に除去するステルス投影法を提案している.この手法では,立体的な対象物へ再帰透過光学系を介して投影を行うための光源が必要となり,従来は実物体にプロジェクタで投影を行うことで実現してきた.本研究では,Volumetric Displayにより立体像を生成し,光源として利用する方式を提案する.
- 2B3-5
-
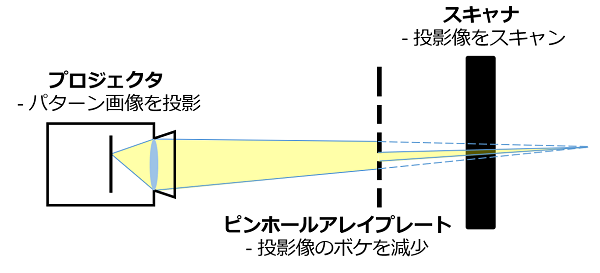
- 近接配置ピンホールアレイマスクを用いたプロジェクタ較正の精度改善
〇杉本 正暁(大阪大学大学院)、岩井 大輔(大阪大学大学院)、佐藤 宏介(大阪大学大学院) - プロジェクタに近接配置したピンホールアレイマスクによって、プロジェクタのピント位置に依存せず常に一定の狭さの作業空間でのプロジェクタ較正が可能であることを実験によって示した。また、提案手法の精度改善・ロバスト性向上を画像処理の側面からのアプローチによって実現し、従来手法との結果の比較を行った。
- 2B3-6
-
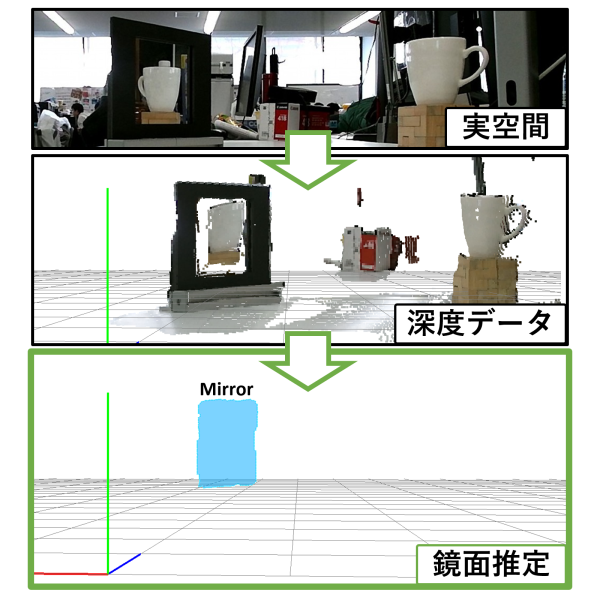
- 深度センサを用いた鏡面検出手法の提案
〇谷口 智生(大阪工業大学 大学院 ロボティクス&デザイン工学研究科)、中泉 文孝(大阪工業大学 ロボティクス&デザイン工学部)、井上 雄紀(大阪工業大学 ロボティクス&デザイン工学部) - 光線を活用する深度センサは,光沢金属面や鏡といった鏡面物体に映り込んだ空間の深度データを取得する.鏡表面の深度とは異なる情報を得ることは,シーン再構築や物体認識の妨げとなる.よってこれら鏡面物体の存在を検出しその影響を取り除くことが重要である.本研究では,枠などの特徴を利用して領域の特定を行い,その鏡面に映り込んだ深度情報から鏡面物体の存在および位置姿勢を検出する手法を提案する.
- 2B3-7
-
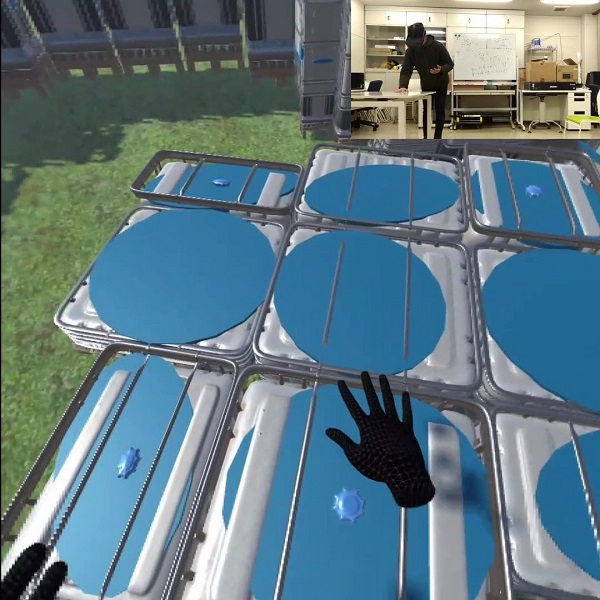
- 3Dスキャンした屋内実空間に基づくVR環境の生成
〇毛呂 聡史(埼玉大学)、小室 孝(埼玉大学) - 本研究では,ユーザが屋内で周囲の障害物を違和感無く認識し,没入感を損なうことなく体験可能なVR環境の生成手法を提案する.屋内をスキャンして3次元点群を取得し,平面検出やクラスタリングなどの点群処理を行うことで,屋内実空間に基づくVR環境を生成する.また,法線推定によって検出した,ユーザが触れることの出来るエリアを提示し,VRに触覚体験を付与する.本稿では,提案システムの動作検証を行った結果を示す.