Monday, 13 September
9月13日
一般発表 9:00-10:20 ユーザインタフェース
座長:伊藤 雄一(青山学院大学)
- 2C1-1
-
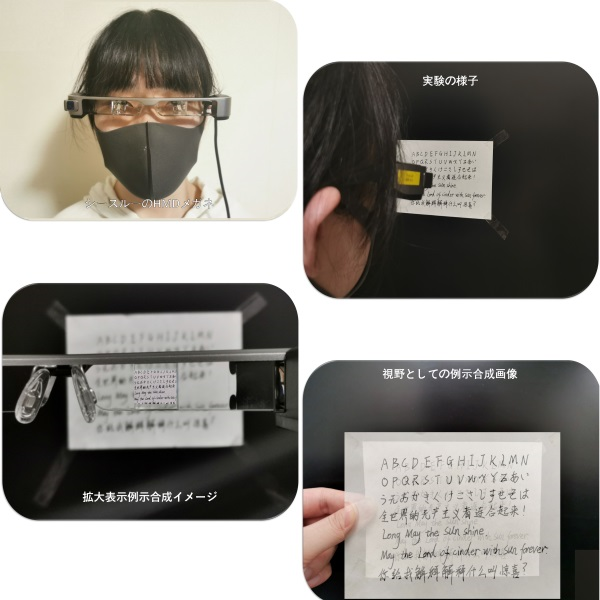
- 老視者のための実際の紙が拡大されたように見えるARドキュメント拡大眼鏡
〇顔 晟裕(名古屋工業大学情報工学専攻)、秋元 遼太(名古屋工業大学情報工学専攻)、舟橋 健司(名古屋工業大学情報工学専攻) - 年齢の高い人はデジタル文書よりも印刷された文書を読む傾向がある。しかし、作業を行いながらの文書確認が必要な場合には老眼鏡の着脱などが煩雑である。本研究ではメガネ型シースルーHMDを用いたAR紙文書ズームシステムを提案する。本システムを利用することで、拡大された紙の文書をメガネ越しに簡単に読むことが可能である。老眼鏡よりも他の仕事をする場合などに有用であることが期待される。
- 2C1-2
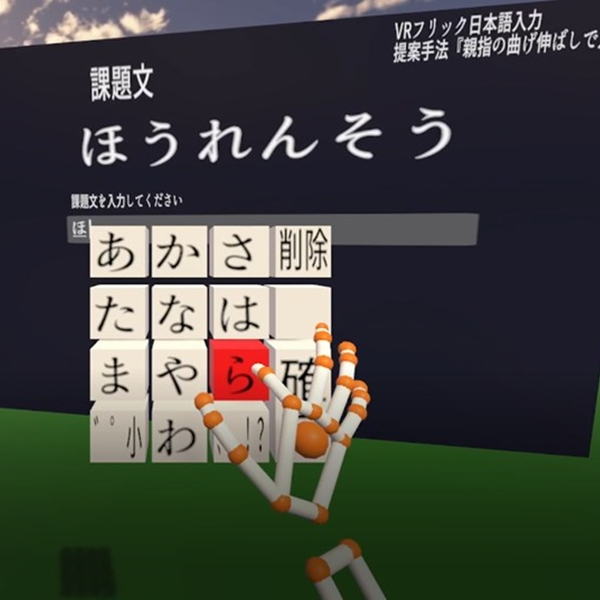
- VRにおけるハンドトラッキングを用いた日本語入力手法の検討
〇大石 真佐貴(東北学院大学大学院電子工学専攻)、物部 寛太郎(東北学院大学工学部情報基盤工学科) - 近年,OculusQuest2 のようにハンドトラッキング機能を搭載するものや,LeapMotion などのハンドトラッキングセンサーによって,VR 空間に自分の手を表示する手法が確立してきている.しかし,現在VRにおいてのハンドトラッキングを用いた文字入力手法の速度や精度は高くない.そこで,本研究では仮想キーボードを入力する際,接触判定だけではなく,指を曲げる動作を組み合わせることで, 手の疲労を軽減することや,速度や精度の向上を目指す.
- 2C1-3
-
- 全景提示により見逃しの不安を緩和する360°動画視聴インタフェース
〇山口 昌馬(東京大学)、小川 奈美(東京大学、DMM.com)、鳴海 拓志(東京大学) - 360°動画視聴時には,何かを見逃しているのではという不安(Fear of Missing Out, FOMO)が生じる.この不安を低減させるため,本研究ではHMDを用いて360°動画を視聴する際に手元に動画の全景を提示する手法を提案する.通常の視聴と比較した結果,提案手法によりFOMOを低減できることがわかった.また,一部の動画について視聴体験の質が向上し,条件間でプレゼンスに有意差は見られなかった.

- 2C1-4
-
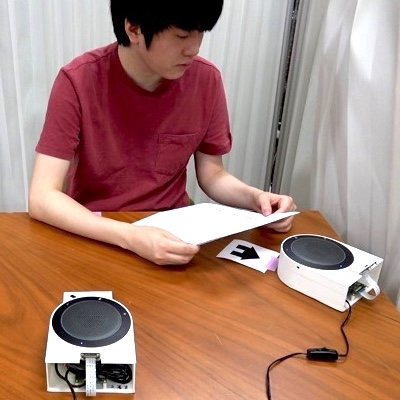
- 会話エージェントにおける視線とフィラーを組み合わせた非言語的な質問認識開始手法の研究
〇郭 正雄(東京大学情報理工学系研究)、葛岡 英明(東京大学情報理工学系研究)、吉田 成朗(東京大学先端科学技術研究センタ/国立研究開発法人科学技術振興機構さきがけ)、川口 一画(筑波大学システム情報系)、鳴海 拓志(東京大学情報理工学系研究)、雨宮 智浩(東京大学情報理工学系研究) - スマートスピーカのような音声操作型の会話エージェントは、特定の単語(ウェイクワード)を最初に言うことで質問の認識を開始する。一方で、この方法では対話の構造が不自然になることや,エージェントの数だけウェイクワードが必要になるといった問題が考えられる。本研究では、視線や会話の間に挟む音声表現であるフィラーといった非言語的手がかりを組み合わせた自然なウェイク手法を提案し、その有効性を検証した。
- 2C1-5
-
- 群ロボットの身体化に関する予備検討
中川 雅人(東京大学工学部計数工学科)、〇柏野 善大(東京大学先端科学技術研究センター)、吉田 成朗(東京大学先端科学技術研究センター/国立研究開発法人科学技術振興機構さきがけ)、稲見 昌彦(東京大学先端科学技術研究センター) - 複数の個体群が協調して動作するシステムを、群ロボットシステムと呼ぶ。このようなシステムは高い頑強性・柔軟性・拡張性を備えている。ヒトの身体が群ロボットで構成されればヒトもこれら性質を獲得することができる。本研究ではヒトの身体全て、もしくは一部を群ロボットで代替する「群身体」を提案しコンセプトを検証するプロトタイプの構成、群ロボットの身体化に必要な条件を探る実験の結果を報告する。

- 2C1-6
-
- Leap Motionを用いた既存展示施設の拡張
〇荒屋 成美(富山大学大学院 芸術文化学研究科)、辻合 秀一(富山大学 芸術文化学系) - 現在,公共施設やショッピングモールをはじめ,あらゆる場所で新型コロナウィルス感染症対策が執られている.その過程で,「非接触」というキーワードが注目されるようになった.赤外線センサーを用いた機器が様々な場所で目にするようになる中で,非接触型のセンサー機器が博物館の展示に活用できないかと考えた.本研究では,ガラスケース内のLeap Motionを活用した展示についての考察を踏まえ,これからの展望について発表する.

- 2C1-7
-
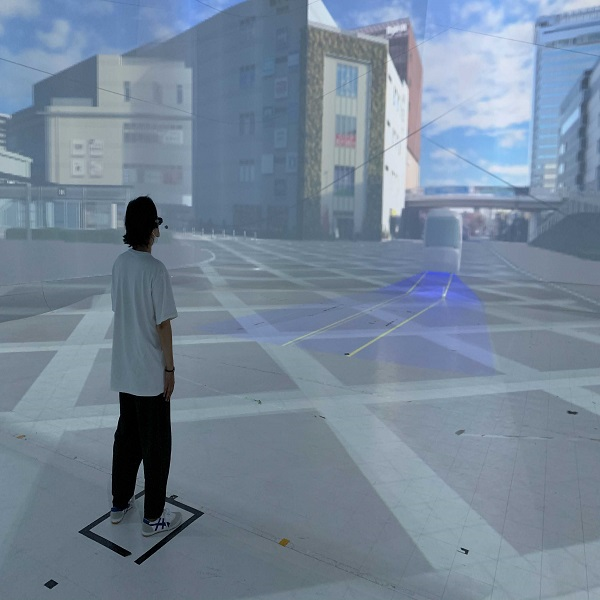
- 歩行者に車両の存在予測範囲を提示するeHMI
〇児玉 拓郎(筑波大学 理工情報生命学術院 システム情報工学研究群)、矢野 博明(筑波大学 システム情報系) - 歩車混在空間において人や車両の安全快適な移動を支援するための外向けHMI(eHMI)の研究が行われている.我々は,車両空間と歩行者空間を物理的に別々に作成し,バーチャル空間で統合するシステムの構築を行った.この空間を使用して,車両から歩行者に対するeHMIとして,歩行者が車両の進行方向及びその存在確率の高い領域の予測を支援するeHMIを設計し、バーチャルなeHMIとして実装した.対面通行タスクによる評価実験を行い,歩行者の通行動作への有効性を検証した.
- 2C1-8
-
- サドル型走行デバイスを用いたバーチャルランニングにおけるVR映像の効果
〇坂口 正道(名古屋工業大学 大学院工学研究科)、田山 滉士(名古屋工業大学 大学院工学研究科) - 我々は,サドルに座り体重を免荷しながら実際の走行と同様の動作が可能なサドル型バーチャル走行デバイスを開発した.本デバイスは安全性に優れ,フィットネス,インタフェース,トレーニングなど多様な分野に応用可能である.本発表では,開発したデバイスを用いたバーチャルランニングにおけるVR映像の影響について発表する.
