Sept. 13 2024
9月13日
技術・芸術展示コアタイム 12:40-14:20 (終日展示可能)
- 3G-01
-
二眼カメラ立体映像をリアルタイムに大型裸眼立体視ディスプレイに表示できるシステムの開発
〇板宮 朋基(神奈川歯科大学歯学部総合歯学教育学講座教育学分野)、中野 亜希人(神奈川歯科大学歯学部総合歯学教育学講座教育学分野)、高才 東(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野)、清水 玲那(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野)、石田 孝文(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野)、小松 紀子(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野)、沢井 奈津子(神奈川歯科大学歯学部教育企画部)、安部 貴大(神奈川歯科大学臨床科学系口腔外科学講座口腔外科学分野) - 本研究では,二眼カメラで撮影した立体映像をリアルタイムに27インチの大型裸眼立体視ディスプレイで立体視できるシステムを開発した.二眼カメラKandao Qoocam EGOで撮影している立体映像を,ソニー空間再現ディスプレイELF-SR2等においてリアルタイムに裸眼立体視できる.iPhone 15 Proを用いて撮影した空間ビデオも再生できる.歯科手技教育における有用性が示唆された.

- 3G-02
-
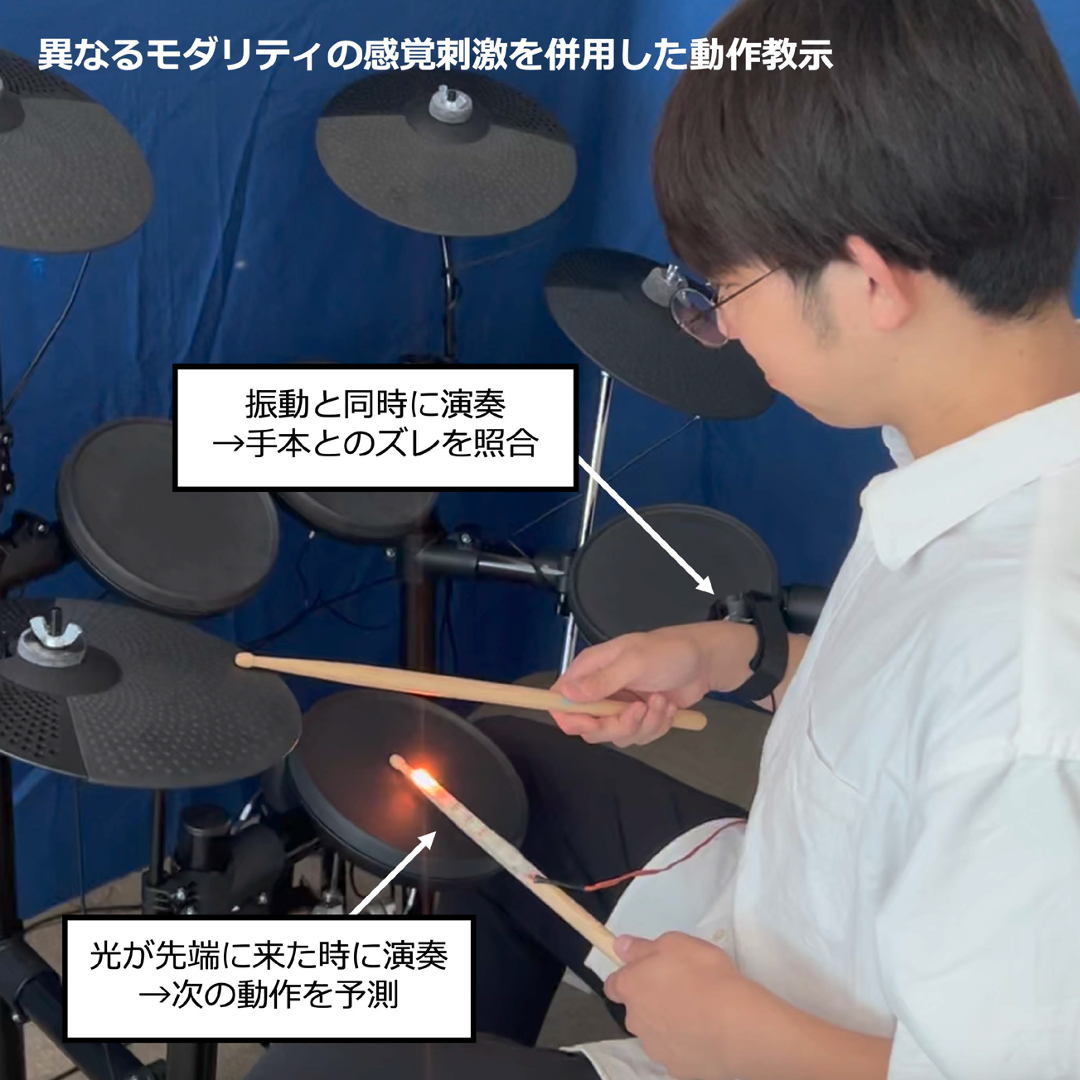
視覚と触覚の異種感覚併用提示による動作教示手法の提案
〇湯川 光(名古屋工業大学)、菅田 成人(名古屋工業大学)、池尻 周杜(名古屋工業大学)、平田 仁(名古屋大学)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科)、田中 由浩(名古屋工業大学、稲盛科学研究機構) - 即時的な身体・認知能力の拡張は,高いスキルの発揮に加え,能力の拡張による自己効力感の向上や行動モチベーションの創出など認知的・行動的な変容を生起する可能性を有する.本研究では,感覚刺激を用いて操作者の主体感を保持しながら,即時的な技能の模倣を可能とする動作教示手法を提案する.本稿では,認知作業負荷を下げ効果的な動作教示を行うことを目的に,異なるモダリティの感覚刺激を併用する動作教示システムを開発し,システム使用時の現象から提案システムにおける各感覚刺激の特性と,応用可能性を考察した.
- 3G-03
-
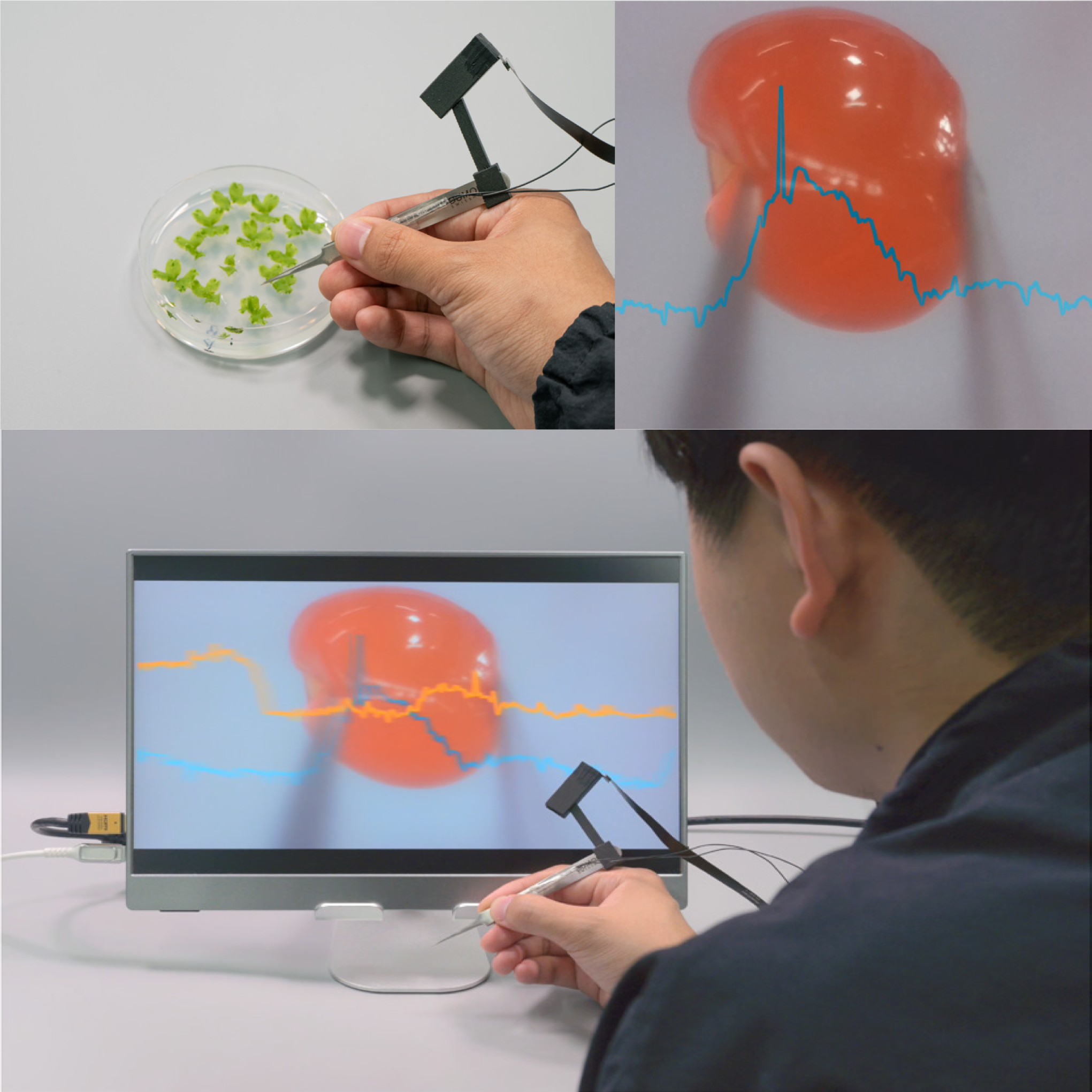
SkillPicker: 挟力情報を共有する技術伝達のためのピンセット型デバイス
〇松平 親慶(東京大学)、大伏 仙泰(東京大学)、大城 翔平(奈良先端科学技術大学院大学)、今井 雄星(東京理科大学)、貴嶋 紗久(産業技術総合研究所)、金澤 建彦(基礎生物学研究所)、塚谷 裕一(東京大学)、中島 敬二(奈良先端科学技術大学院大学)、稲見 昌彦(東京大学) - 生物学実験においてピンセットは不可欠なツールであり、中でもピンセットの挟力操作は実験結果を左右する技能として知られる。熟練者による挟力の教示が困難であるという課題に対し、我々はピンセット先端部の拡大像提示と挟力計測機能を組み合わせたピンセット型の技能伝達用デバイスSkillPickerを提案する。挟力の可視化や音階への変換を通じ、初心者は熟練者の挟力操作を体感的に習得可能となることが期待される。
- 3G-04
-
遊牧民の伝統を体験するポータルシステムの基礎検討
〇KANIMETOVA AZIZA(慶應義塾大学大学院メディアデザイン研究科)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、Armstrong Mark(慶應義塾大学大学院メディアデザイン研究科)、脇坂 崇平(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 本研究では、キルギスの遊牧文化を身近に感じてもらうことを目指し、画像生成 AI によってリアルタイムに体験者の映像を異なる文化スタイルへと変換する Mirrored Culture という体験を提案する。体験者は伝統的な移動式住居に入り、民族衣装を纏った自分自身の映像を視聴する。複数の文化的側面を体験できるプロトタイプを実装と体験者からのフィードバックを通じて、今後の開発の方向性を検討した。

- 3G-05
-
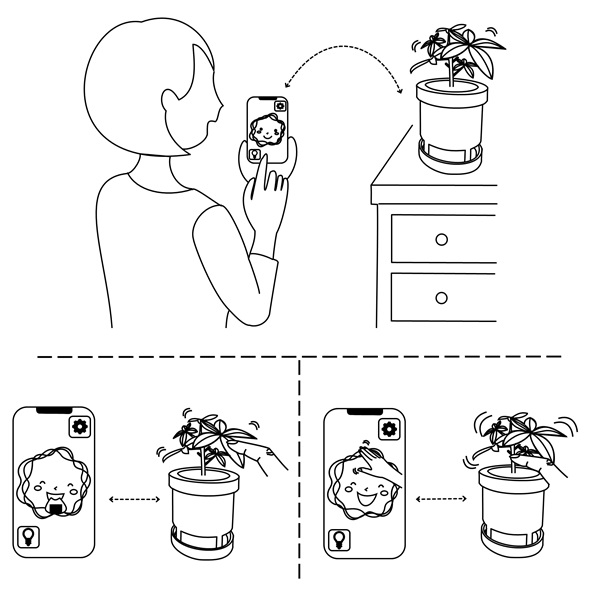
人と植物の物理的接触を拡張するシステム(第2報): 接触により育成する電子ペットの設計と接触部位推定の基礎検討
〇林 海歩(筑波大学)、蜂須 拓(筑波大学) - 我々はこれまでに人と植物との物理的接触を拡張することを目的に,接触を検知して植物から人へ触覚刺激をフィードバックする機能を搭載した植木鉢を開発してきた.しかし,計測は接触の有無の検知にとどまっており,接触位置に応じたフィードバック等のインタラクションの設計が限定的であった.本稿では,容量性センシングを用いた接触計測技術において,接触位置を高精度に推定可能な植物の検討について報告する.
- 3G-06
-
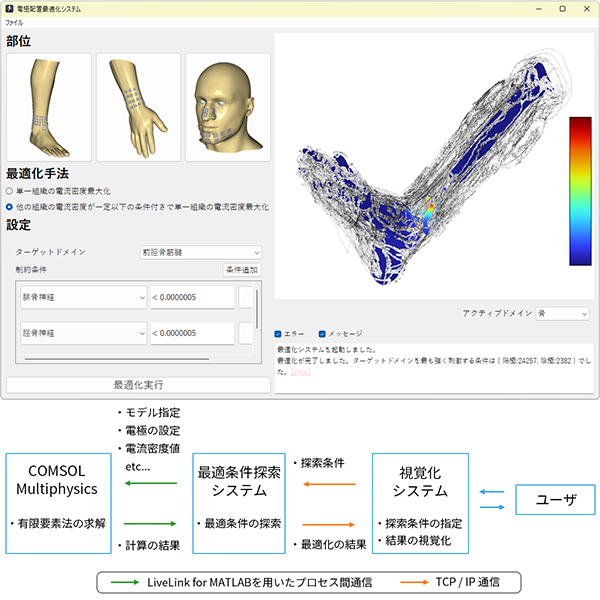
有限要素法を用いた経皮電気刺激の電極配置最適化システム
〇太田 貴士(東京大学大学院)、葛岡 英明(東京大学大学院)、雨宮 智浩(東京大学大学院)、青山 一真(群馬大学) - 経皮電気刺激において,電極配置は重要なパラメータの1つであるが,ヒトの身体は複数の組織が複雑な構造をなしているため,特定の組織を効率的に刺激できる最適な電極配置を直観的に同定することは困難である.本研究では,有限要素法による電流シミュレーション結果の全探索により,膨大な電極配置条件から最適な電気刺激条件を同定するシステムを構築し,筋や腱,神経束などが複雑な配置をなす下肢における電気刺激の電極配置最適化を例に,本システムの有効性を検証した.
- 3G-07
-
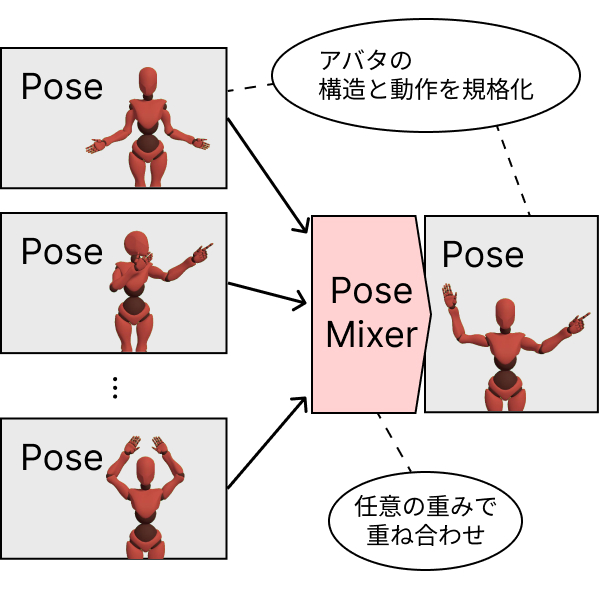
アバタの構造・動作の実装を効率化するツールキット「PoseSynth」の提案
〇山口 周(東京大学)、畑田 裕二(東京大学)、橋浦 健太(東京大学)、鳴海 拓志(東京大学) - 現実の身体のあり方を超越した構造・動作を有するアバタは様々な研究領域で役立てられている一方で,その実装方法は様々であり,再利用が困難である.本研究では,アバタの構造・動作を扱うための規格を策定し,多様な構造を有するアバタの多様な動作を効率良く実装できるツールキット「PoseSynth」を提案する.PoseSynthはアバタの姿勢を変換して別のアバタの姿勢に代入する処理を繰り返すことで,様々なアバタの動作を効率良く実装できる.
- 3G-08
-
咀嚼・嚥下中の視聴覚ノイズの遮断による風味と食感の向上
〇日塔 諒太(東京大学)、小宮 晨一(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - 食品が持つ繊細な風味や食感を高めるため,口腔内の感覚に集中し視聴覚ノイズを遮断することがある.本研究では,食品を口内に入れた瞬間に視聴覚ノイズを遮断し,嚥下が終了した瞬間に視聴覚ノイズを復元させることで,集中的注意が促進され風味や食感が向上すると考え,検証を行った. 予備検証の結果,提案手法の有用性が示唆された.

- 3G-09
- 取り下げ
- 3G-10
-
外界を表現する立体振動ディスプレイ 第10報:胴体装着型立体振動デバイスの定位精度評価
〇大原 玄(東北大学)、昆陽 雅司(東北大学)、田所 諭(東北大学) - 立体振動は,外界の振動源を定位させる,従来のファントムセンセーションによる定位を革新する振動触覚技術である.これまでに前腕や足裏の立体振動デバイスを開発したが,定位が装着部位周辺や床面上に限られ,身体周辺を上下左右に定位させることは難しかった.そこで我々は身体周辺を表現するために胴体装着型の振動デバイスを開発し,立体振動のアルゴリズムで駆動した場合の定位精度を測定しその有効性を報告する.
- 3G-11
-
呼吸運動を模した空中超音波刺激による仮想的な動物とのインタラクション
〇細井 十楽(東京大学)、金 杜(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - 動物とのインタラクションはアニマルセラピーや教育等の観点から需要が大きい。一方で、実際の動物との触れ合いは、アレルギーや外傷との危険性、倫理性の観点から制約がある。本研究では、非接触に触覚刺激を提示可能な空中超音波刺激を用いた仮想的な動物とのインタラクション体験において,呼吸運動を模擬した視触覚刺激を提示することを提案した.猫とのインタラクションを行う実験によって,猫の呼吸運動を視触覚的に提示することで,猫の生き物らしさについての主観評価が向上することを確認した.

- 3G-12
-
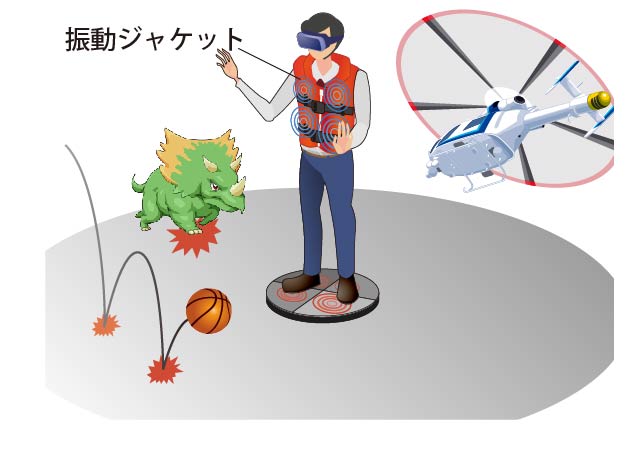
振動・熱刺激を用いたしびれ感覚の提示による衝撃感の向上
〇藤田 光(東京大学)、細井 十楽(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - VRにおいて衝撃感提示に関する多くの研究が行われてきたが,衝撃後の残効に関する研究は少ない.本研究では,残効の一つであるしびれ感覚を再現する振動・熱提示の効果を調査する.野球の打撃を再現した仮想環境と振動・撃力・熱提示が可能なデバイスを作成し,実験を実施した.結果,振動・熱提示がしびれ感覚を再現し,衝撃感を向上させることが確認された.特に高周波の振動がしびれ感覚と衝撃感のリアリティ向上に有意に作用した.

- 3G-13
- 取り下げ
- 3G-14
-
テレロボットにおける安定した物体把持のための回転中心とモーメントの推定
〇街道 一翔(立命館大学)、柚 空翔(立命館大学)、安藤 潤人(立命館大学)、寒川 雅之(新潟大学)、野間 春生(立命館大学) - 本研究では,テレロボットの物体把持状態を検出して操作者に伝えることを目的とし,圧力と剪断力を計測可能なMEMS触覚センサを4つ用いた,センサの出力から回転中心とモーメントを推定可能なマイクロフォースプレートを開発した.評価実験ではフォースプレート上のある点を中心に回転をかけ回転中心を推定した.実験の結果,フォースプレートの中央付近の回転中心において推定値との誤差は0.7 cmとなり比較的正確に推定できた.
- 3G-15
-
ソフト振動アクチュエータを用いた仮想物体の表面の質感を能動的に探索するための触覚提示システム
〇黒川 朝陽(立命館大学)、清水 真陽(立命館大学)、安藤 潤人(立命館大学)、野間 春生(立命館大学) - 本研究の目的はネット上で仮想物体の表面テクスチャ感を能動的に探索できる触覚提示システムを開発することである.そのために,光学センサと触覚ディスプレイを備えたデバイスと,デバイスの動きに応じて振動を提示するシステムを開発した.評価実験では異なる線幅の縦縞の触覚表現を識別するタスクから,知覚できる細かさを調査した.その結果,線幅が0.16 mm以上で触覚表現の細かさを知覚できることが示された.
- 3G-16
-
陶芸技能の伝承に向けた触覚提示システムの応用可能性の検討
〇朱 宇凡(慶應義塾大学大学院メディアデザイン研究科)、堀江 新(慶應義塾大学大学院メディアデザイン研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 伝統工芸の職人の技能は身体知となっており、形式知化が難しいためその伝承方法が課題となっている。本研究は、職人の筋肉活動を計測し、感覚情報を直接に触覚によって提示することで、陶芸初心者に対して熟練者の技能への理解を深める技能伝承システムを提案する。提案したシステムを陶芸専門家や一般ユーザーに使用してもらい、システムのユーザー体験の評価に基づき、システムの陶芸技能伝承における応用可能性を論ずる。

- 3G-17
-
前後屈方向のハンガー反射提示装置の開発と評価
〇中村 拓人(東京大学)、葛岡 英明(東京大学) - これまでの頭部におけるハンガー反射制御装置は,ヨー軸である左右方向のハンガー反射を制御する装置であった.一方で,パッシブな装置によるピッチ軸やロール軸の力覚知覚は確認されていたが,それらを制御する装置開発には至っていなかった.そこで本研究では,新たな皮膚変形提示部位を発見することで,頭部のピッチ軸である前後屈方向のハンガー反射装置を開発した.

- 3G-18
-
運動学習支援のための周期的かつ離散的な制動力を提示する下肢装着型デバイスの装着性向上
〇高田 崇天(筑波大学)、蜂須 拓(筑波大学)、ハサン モダル(筑波大学) - 我々はこれまでに身体運動に対する感覚刺激のフィードバックによる運動学習の支援を目的に,膝関節の屈伸角度に応じて周期的かつ離散的な制動力をフィードバックするデバイスの設計・開発に取り組んできた.本デバイスの装着性には課題があり,使用者の実際の膝関節とデバイスが計測した角度の間に無視できない誤差が生じていた.本発表では,柔軟な装着性の実現によるフィードバックの質の向上を目指し,装具に蛇腹機構を,リンクにスライド機構を採用したデバイスの設計について報告する.

- 3G-19
-
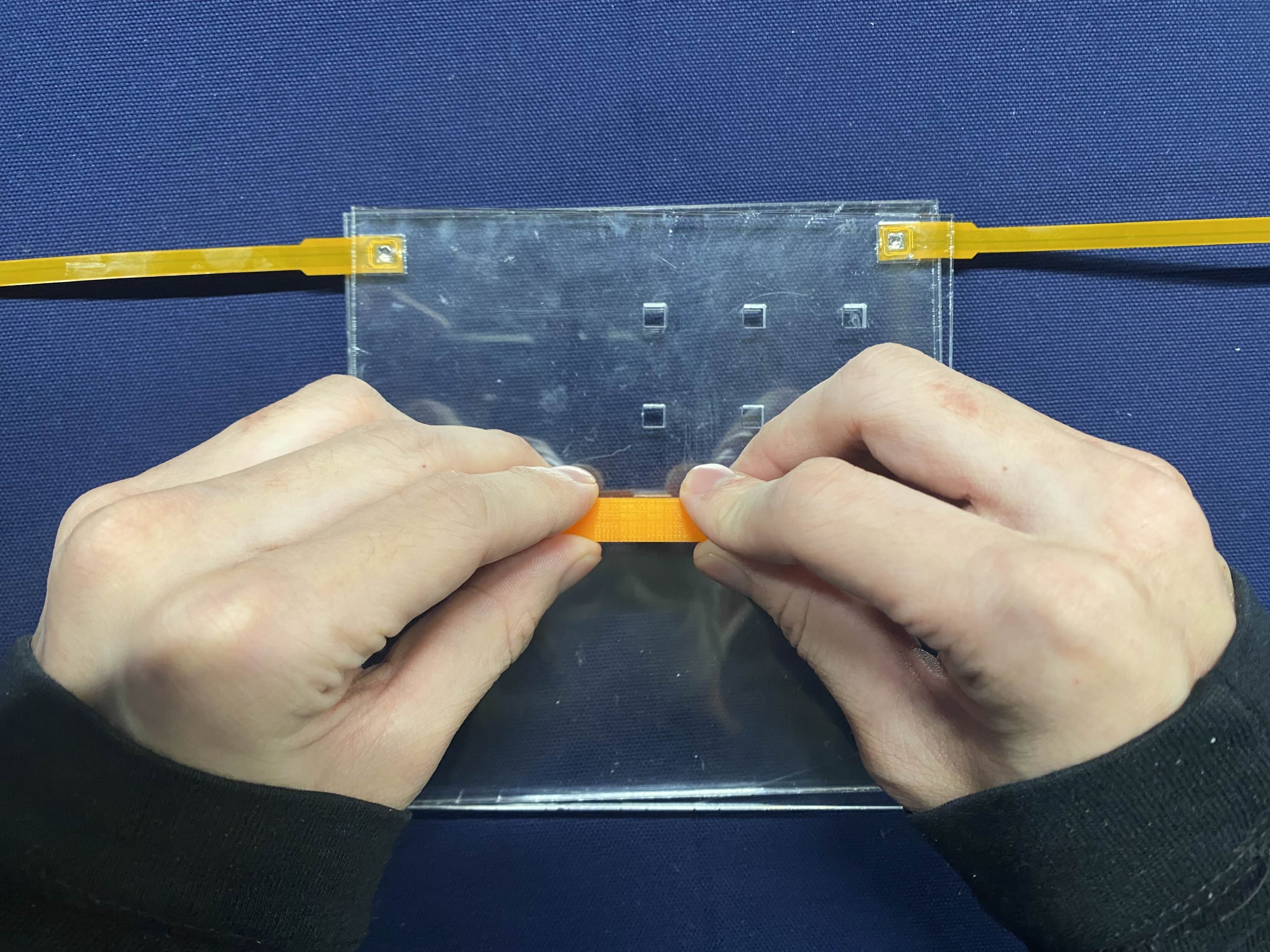
フレネルシェイプ:各指先接平面の傾きを操作する形状提示装置
〇太田 裕紀(奈良先端科学技術大学院大学)、平尾 悠太朗(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - 日常生活において人々は多様な形状の物体を把持・操作する.同様に,バーチャルリアリティ環境においても,形状を提示することが臨場感向上に寄与する.既存のハンドヘルド型形状提示装置は,指先相対位置の固定やピンアレイを利用して形状を提示しているが,これらの方法では各指先接平面の傾きという重要な感覚を再現できていない.そこで本研究では,主として各指先接平面の傾きを提示する新しい形状提示装置を提案する.
- 3G-20
-
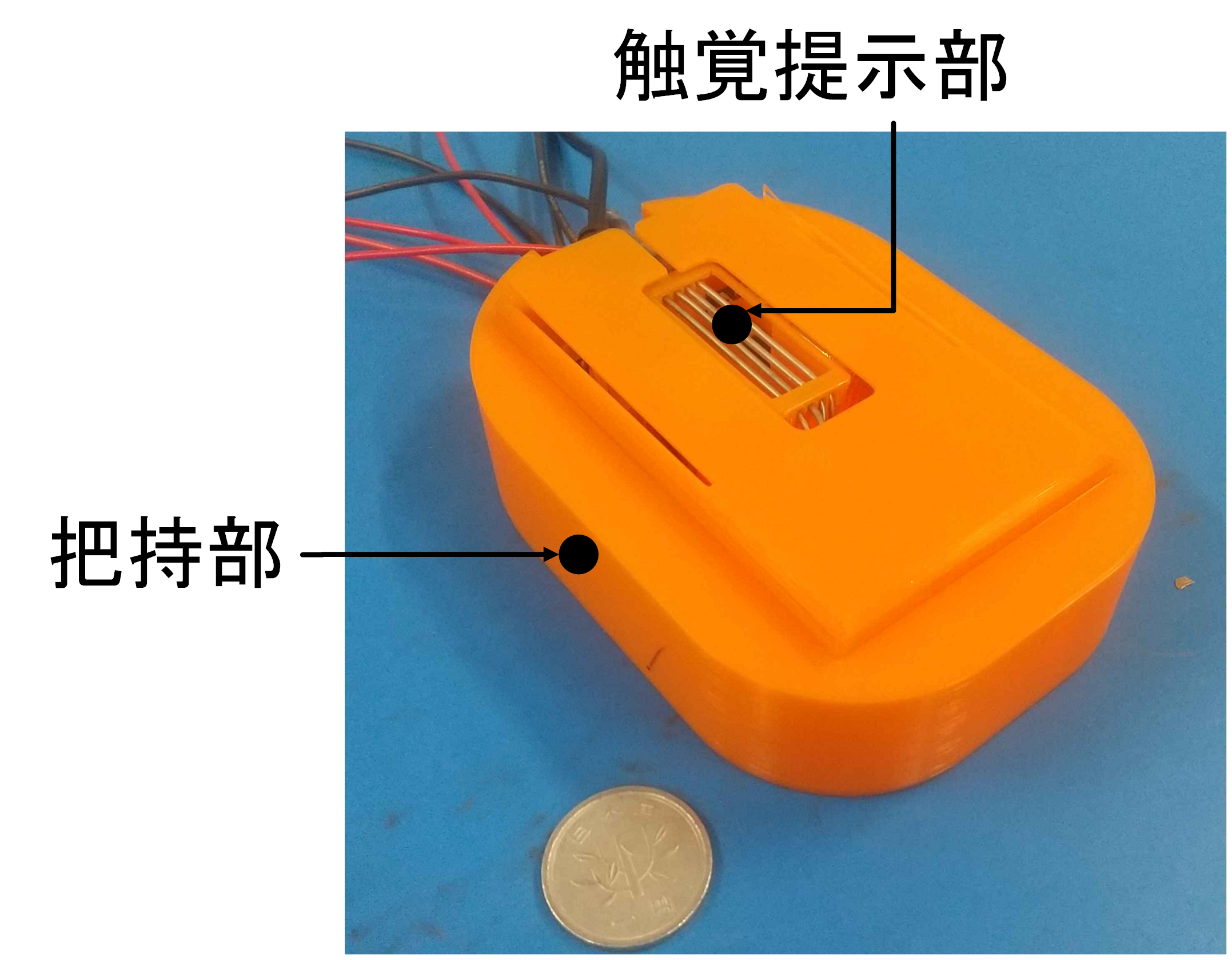
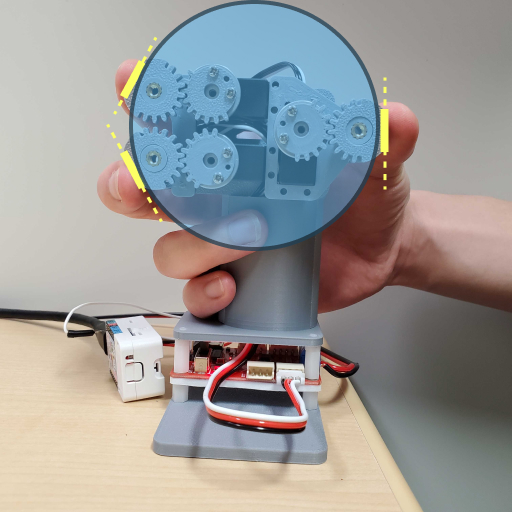
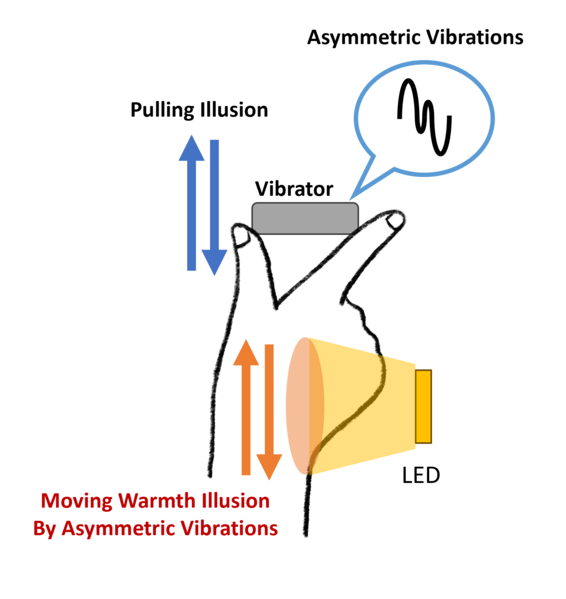
非対称振動による温感の運動錯覚提示
〇伊藤 天翔(筑波大学 理工情報生命学術院)、田辺 健(産業技術総合研究所 人間情報インタラクション研究部門)、長谷川 晶一(東京工業大学 未来産業技術研究所)、家永 直人(筑波大学 システム情報系)、黒田 嘉宏(筑波大学 システム情報系) - 本研究では非対称振動が温感の運動錯覚を引き起こすか調査しその特性を検討する。温感は非接触の可視光LEDで提示し、運動錯覚には牽引力錯覚に用いられる非対称振動を適用する。温覚提示と非対称振動あるいは正弦波振動を用いた比較実験で、温度感覚に運動錯覚が生じるかに加え熱源移動時の運動感との比較や、錯覚を組み合わせた際の影響を調査した。本研究により振動子による温感の運動感提示が可能になると期待される。
- 3G-21
-
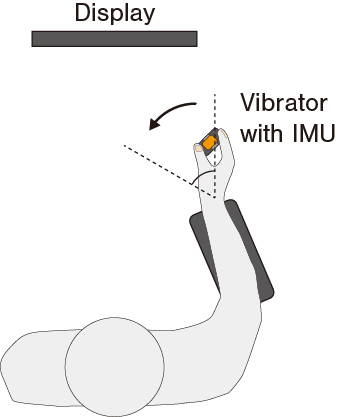
牽引力錯覚によって生じる手関節の弾道運動と行為主体感の不一致
〇田辺 健(国立研究開発法人産業技術総合研究所)、金子 秀和(国立研究開発法人産業技術総合研究所) - 本研究では,手関節の弾道的な掌背屈運動中に牽引力錯覚を誘発し,その時の運動への影響を客観的及び主観的に評価した.実験の結果,運動の方向に牽引力錯覚を誘発した場合,錯覚なしの条件に比べて,運動の速度が有意に上昇し,運動への行為主体感が有意に低下した.速度を上昇させた要因を明らかにするために,主働筋の筋活動を調べた結果,筋電位の大きさと運動の速度に正の相関が認められた.以上の結果より,牽引力錯覚と運動の向きが一致した場合,自ら筋発揮によって動きを速めているにも関わらず,動かされた感覚(低い行為主体感)が生じることが示された.
- 3G-22
-
セルフリオネット:指先力入力システムによる全身アバタ操作と多様な触覚インタラクションの実現
〇平尾 悠太朗(奈良先端科学技術大学院大学)、橋本 健(東京大学) - 本論文では指先の力入力操作によってバーチャルアバタ全身の身体化を可能とするシステム,セルフリオネットを提案する.提案システムは指先の力入力のみによってアバタの身体全身の操作や歩行を実現できるだけでなく,バーチャル物体や環境の物理特性に応じて操作に必要な力入力量を変化させることで,バーチャル物体の重さや硬さといった触覚特性や,水中や沼道,坂道などのバーチャル環境の触覚的表現を可能とする.
- 3G-23
-
ポータルを使った身体の分裂と自己位置の拡張
〇近藤 亮太(東京大学)、杉本 麻樹(慶應義塾大学) - バーチャル身体を左右に分裂させ,それに所有感を誘発することで,自己位置が拡張される。しかし,分裂によって所有感は弱くなること,身体近傍空間外の身体には所有感が生じないことがわかっているため自己位置の拡張範囲には限界がある。本研究では,ポータルを使って身体のつながりを補完することで,分裂した遠くの身体に所有感が生起し,自己位置が拡張されるか調べた。

- 3G-24
-
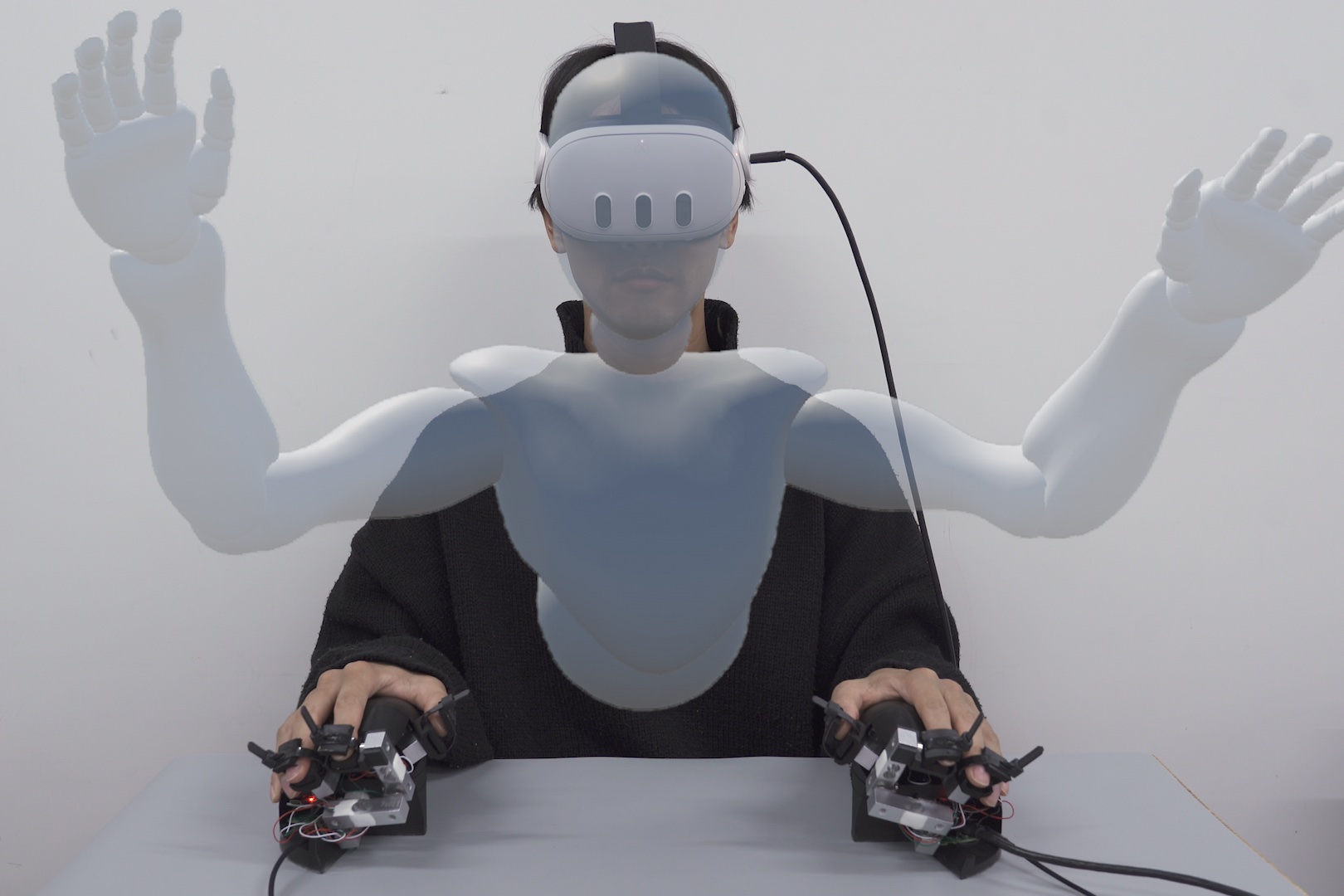
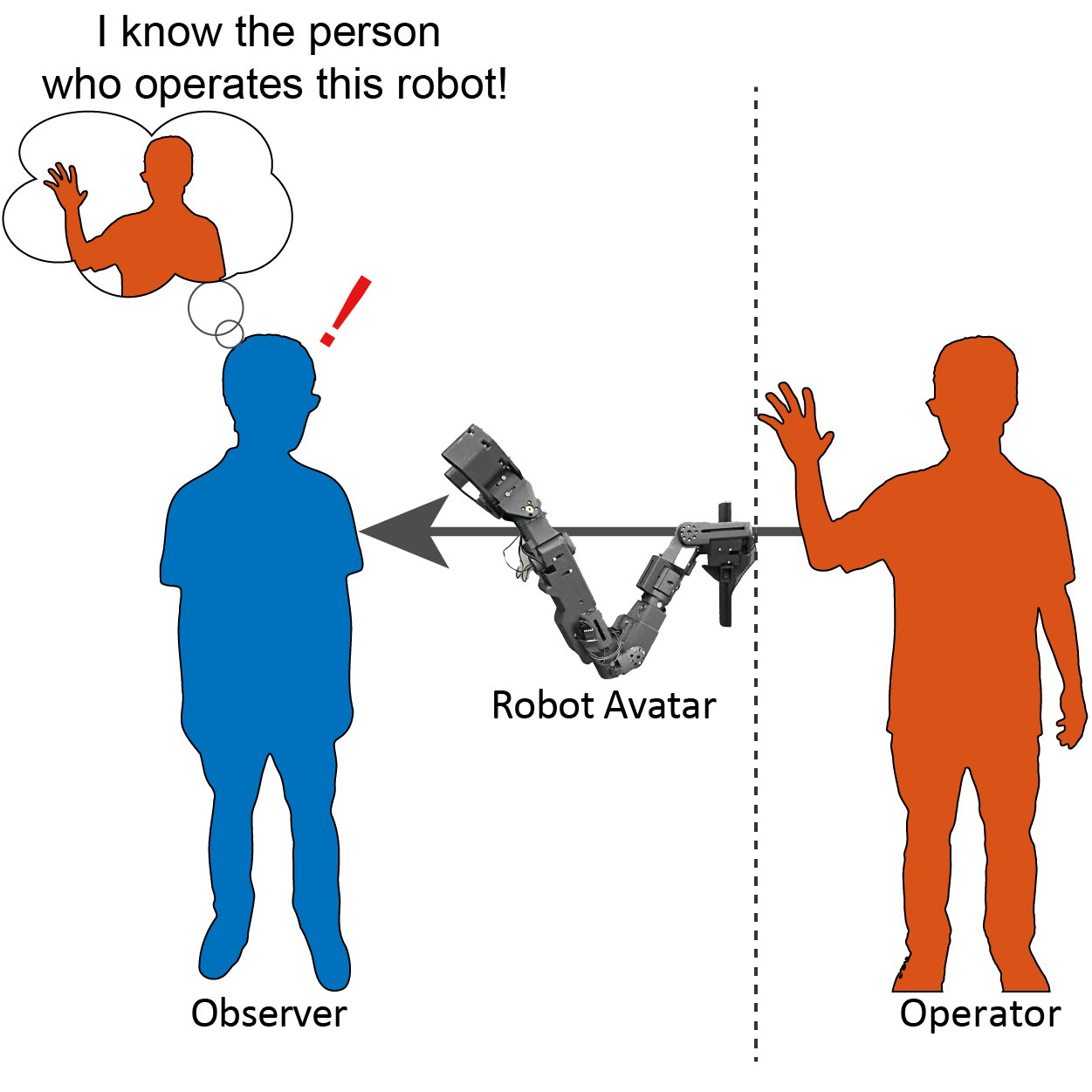
ロボットアバターの設計における個人の運動特性の反映による存在感表出の予備的検討
〇味岡 俊嘉(慶應義塾大学大学院メディアデザイン研究科)、萩原 隆義(慶應義塾大学大学院メディアデザイン研究科)、安藤 良一(慶應義塾大学大学院メディアデザイン研究科)、吉田 貴寿(慶應義塾大学大学院メディアデザイン研究科)、脇坂 崇平(慶應義塾大学大学院メディアデザイン研究科)、吉藤 健太朗(株式会社オリィ研究所)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - ロボットアバターは操作者の存在を他者に感じさせることができる.しかし,他者から見て操作者が誰なのかを認識できるような,個性の表出が可能な条件については明らかではない.本研究では,ロボットアームを手動で動かすことによって動作を記録,再生し,操作者の存在感を提示するシステムを開発した.その動作から他者が操作者の存在を感じるか,認知的変化が生起するかについて予備的検討を行った.
- 3G-25
-
手足のみアバターによる疑似軟体所有感の誘発
〇廣瀬 修也(豊橋技術科学大学)、北崎 充晃(豊橋技術科学大学) - 手と足のみが自己身体と連動して動くアバターを観察すると、透明な身体が補間されて知覚され、それに身体所有感を感じる。ただし、手と足のアバターの位置をスクランブルすると全身所有感が失われ、部位所有感のみが生じる。本研究では、手と足の空間的配置は崩さずにそれらの間を線で繋ぐことで、疑似的な軟体所有感を誘発できることを報告する。

- 3G-26
- 取り下げ
- 3G-27
-
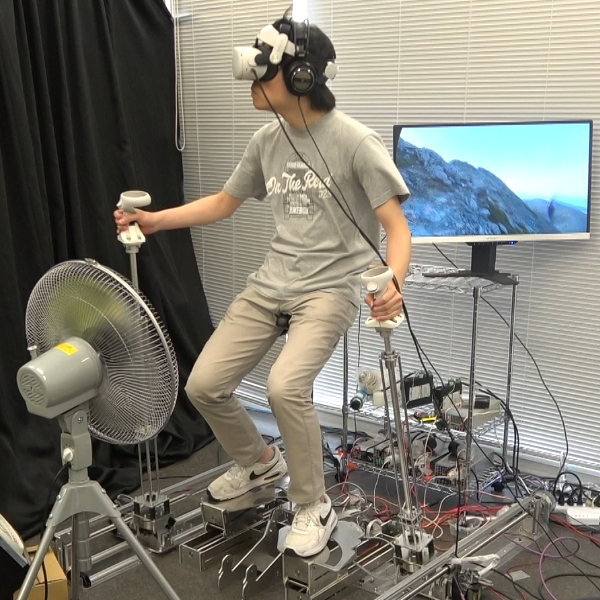
山岳トレッキングとスキーを表現するバーチャルストックと身体運動感覚の研究
〇小島 優希也(東京都立大学)、岡本 正吾(東京都立大学)、ヤェム ヴィボル(筑波大学)、池井 寧(東京大学) - ユーザが把持したストック(ポール)とペダル,サドルによって全身に運動刺激を加え 360度実写映像の空間での身体感覚をバーチャルに再現することにより,山岳トレッキングやスキーの体験を伝えるシステムを構築した.全方位の視聴覚情報に連動して提示される上肢運動刺激,下肢運動刺激,前庭感覚刺激および気流の触覚,さらに足底,サドル,手への振動触覚により,身体的追体験の形式で,映像の空間とそこでの全身運動への没入感を与えることが可能である.本論文では装置の構成と山岳登攀の表現手法とその初期的な評価およびストック感覚の特徴について述べる.
- 3G-28
-
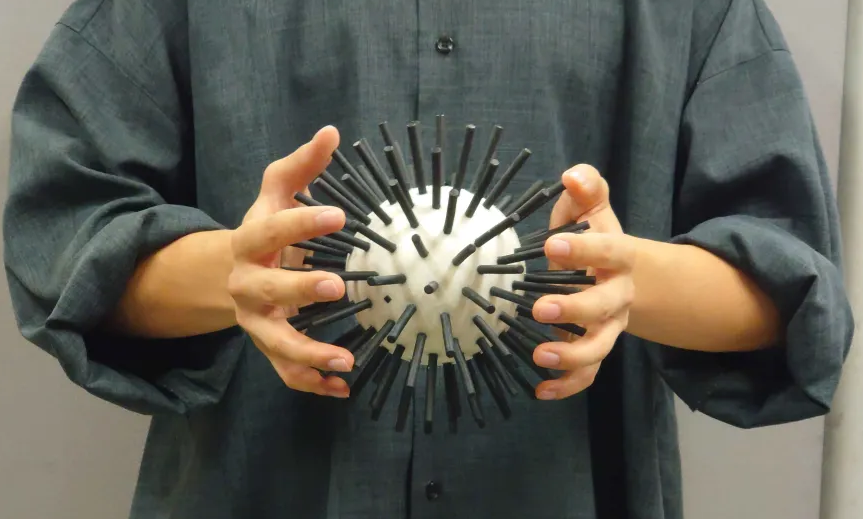
Pin Ball:ハンドヘルド型球体ピンアレイインターフェース
〇杉本 隆平(電気通信大学)、梶本 裕之(電気通信大学) - 球面上に配置された直動アクチュエーターによって構成されるピンアレイによって、立体的な触覚提示を可能にするPin Ballを提案する。提案するデバイスは80本のピンアレイによって構成され、小型に設計された球型A-TUIである。全周囲に配置されたピンアレイが伸縮し、ユーザーの両手に立体的な形状や触覚を提示することができる。本稿では、球型A-TUIを構成する回路基板やアクチュエータに関する検討を示す。
- 3G-29
-
仰臥位でのVR体験向け非装着型空中浮遊HMDの基礎検討
〇古谷 佳輝(九州大学大学院システム情報科学府)、矢作 優知(東京大学大学院学際情報学府、日本学術振興会特別研究員DC)、菊池 知世(東京大学大学院総合文化研究科)、余合 彩子(個人)、清川 清(奈良先端科学技術大学院大学)、福嶋 政期(九州大学大学院システム情報科学府) - HMDの普及に伴って様々なVR空間の使い方がユーザによって開拓されている。本研究ではそのうち、「VR睡眠」をはじめとする、仰臥位でVRコンテンツを体験する場面に注目する。従来のHMDは頭部に直接デバイスを装着する必要があるため顔の圧迫感や寝返りの打ちにくさが体験の妨げになっている。そこで本研究では再帰透過光学系を用いて頭部にデバイスを装着せずにVRコンテンツを体験できるシステムを提案する。

- 3G-30
-
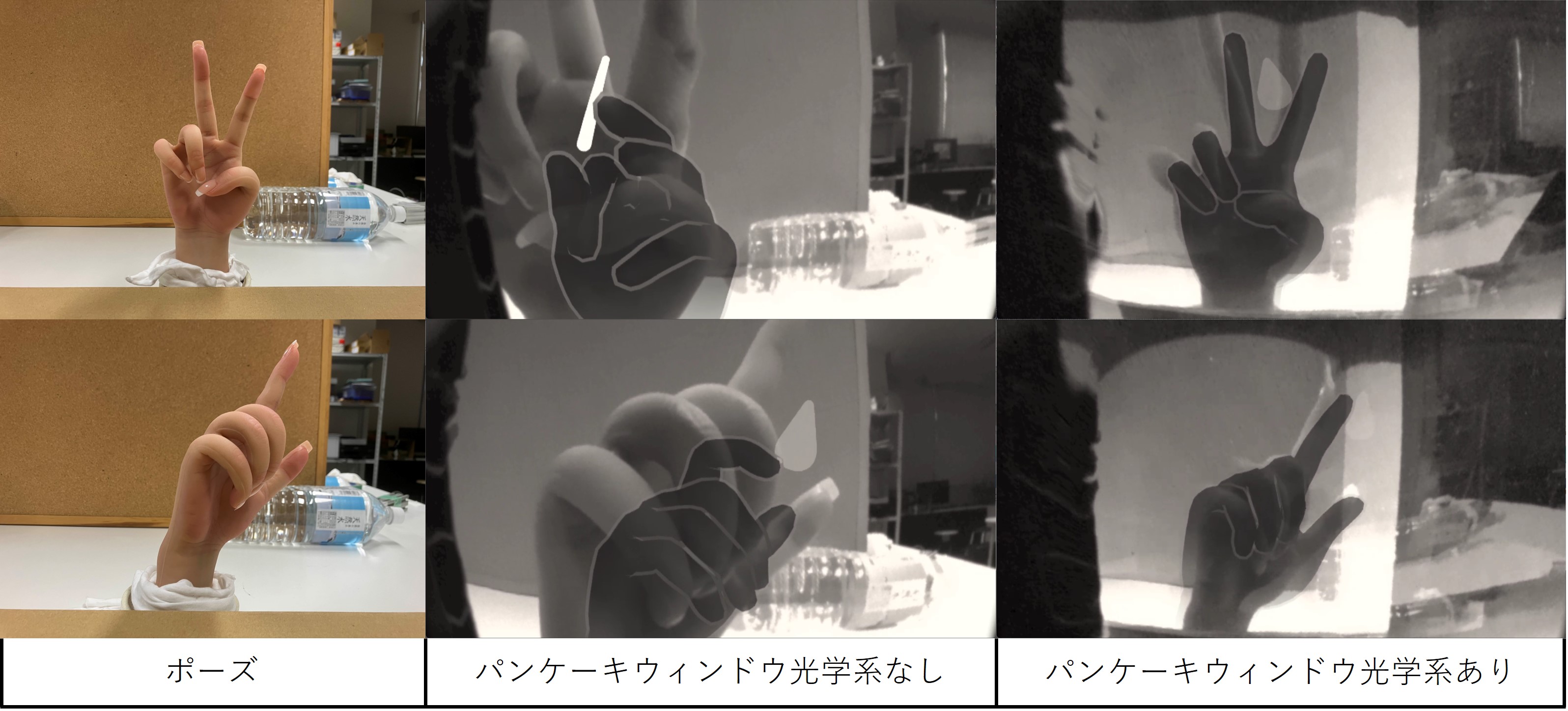
パンケーキウィンドウ光学系のMeta Quest 2カメラへの適応
〇野倉 大輝(岐阜大学)、木島 竜吾(岐阜大学) - ビデオシースルーHMD Meta Quest 2はステレオカメラからデプスマップを推定し、世界を再構成する方式を取っているが、近距離だと対応点が取れず歪んでしまう。本研究では、Meta Quest 2にパンケーキウィンドウ光学系を装着し、視点を引くようにした。その結果、近距離における歪みの影響が小さくなること、Meta Quest 2のハンドトラッキング機能の性能が向上することを明らかにした。
- 3G-31
-
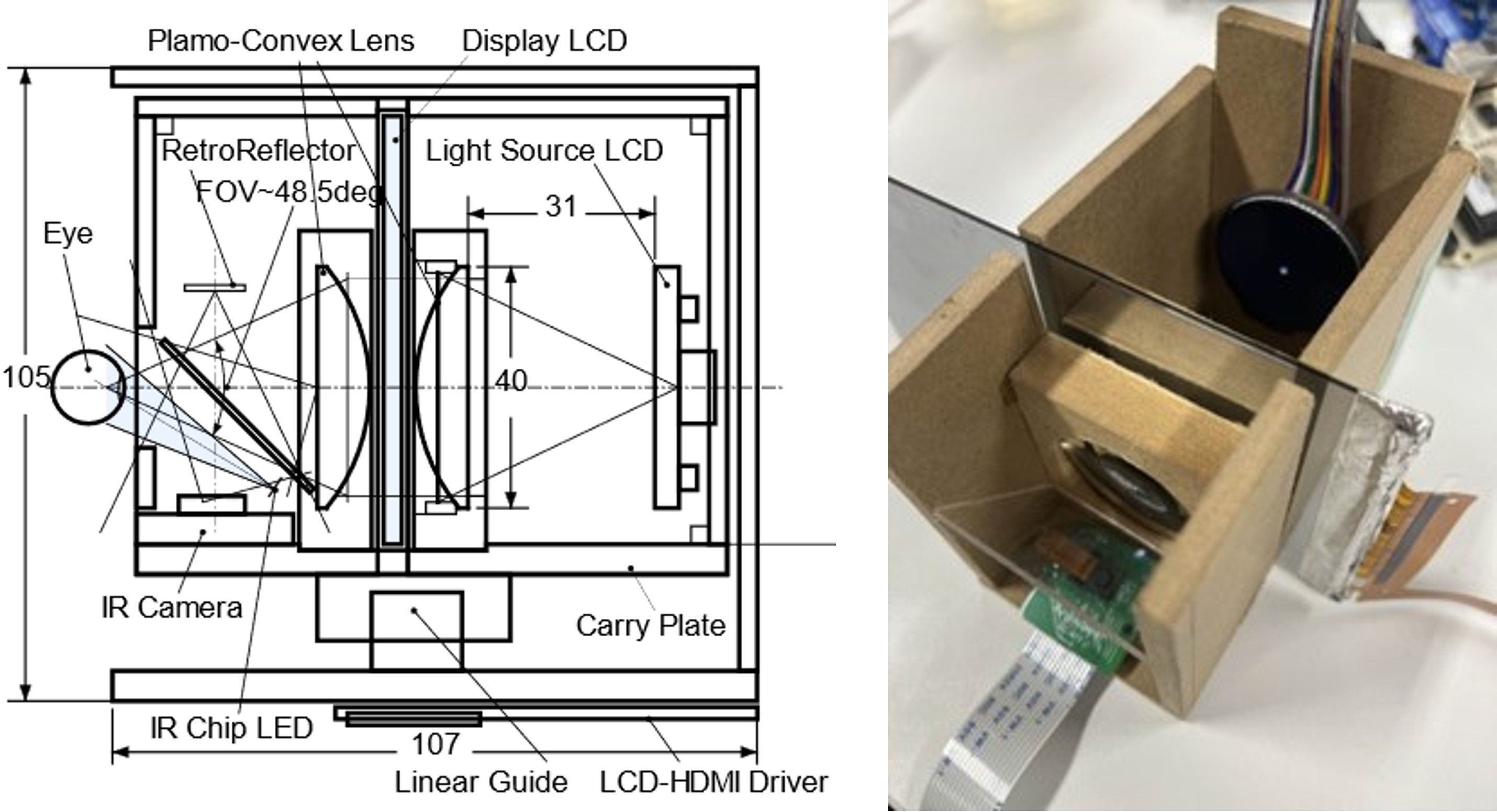
アイトラッキング機能を備えたマクスウェル視ディスプレイの小型化
神谷 陸杜(岐阜大学)、〇野倉 大輝(岐阜大学)、木島 竜吾(岐阜大学) - マクスウェル光学系を用いた3次元ディスプレイは融像を容易にすることができるが,アイボックスが非常に小さく,少し目を動かすだけで像が見えなくなる.そこで,使用者の瞳をトラッキングしピンホール像が瞳を追うようにピンホール光源を動かす必要がある.本研究では,ピンホールとして液晶ディスプレイの液晶光源の画素を用いた.さらに,マクスウェル光学系を用いた3次元ディスプレイの小型化したHMDを設計,試作を行った.
- 3G-32
-
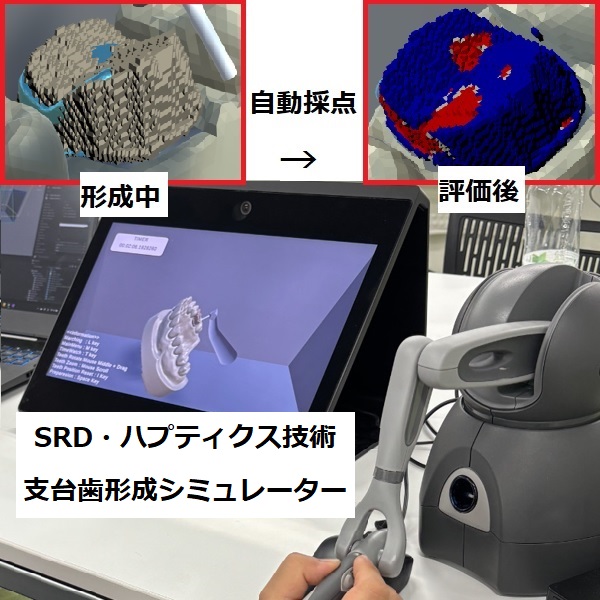
裸眼立体視とハプティクス技術を併用した歯牙切削トレーニングシステムの開発
〇富田 凜太郎(神奈川歯科大学)、板宮 朋基(神奈川歯科大学)、中野 亜希人(神奈川歯科大学)、川西 範繁(神奈川歯科大学)、星 憲幸(神奈川歯科大学)、木本 克彦(神奈川歯科大学) - 本研究では裸眼立体視技術とハプティクス技術を併用し,歯科教育において重要な項目の一つである歯牙切削手技の効果的な向上を目的としたトレーニングシステムを開発した.歯列の3D-CGモデルと切削器具の三次元的な位置と角度を裸眼立体視ディスプレイ上に表示し、ペン型ハプティクスデバイスを用いてリアルタイムな歯牙の切削・形成と自動採点が可能である.歯科医師による評価の結果,本システムの有用性が示唆された