Sept. 13 2024
9月13日
口頭発表 09:30-10:10 身体性認知1
座長:プンポンサノン パリンヤ(埼玉大)
- 3D1-01
-
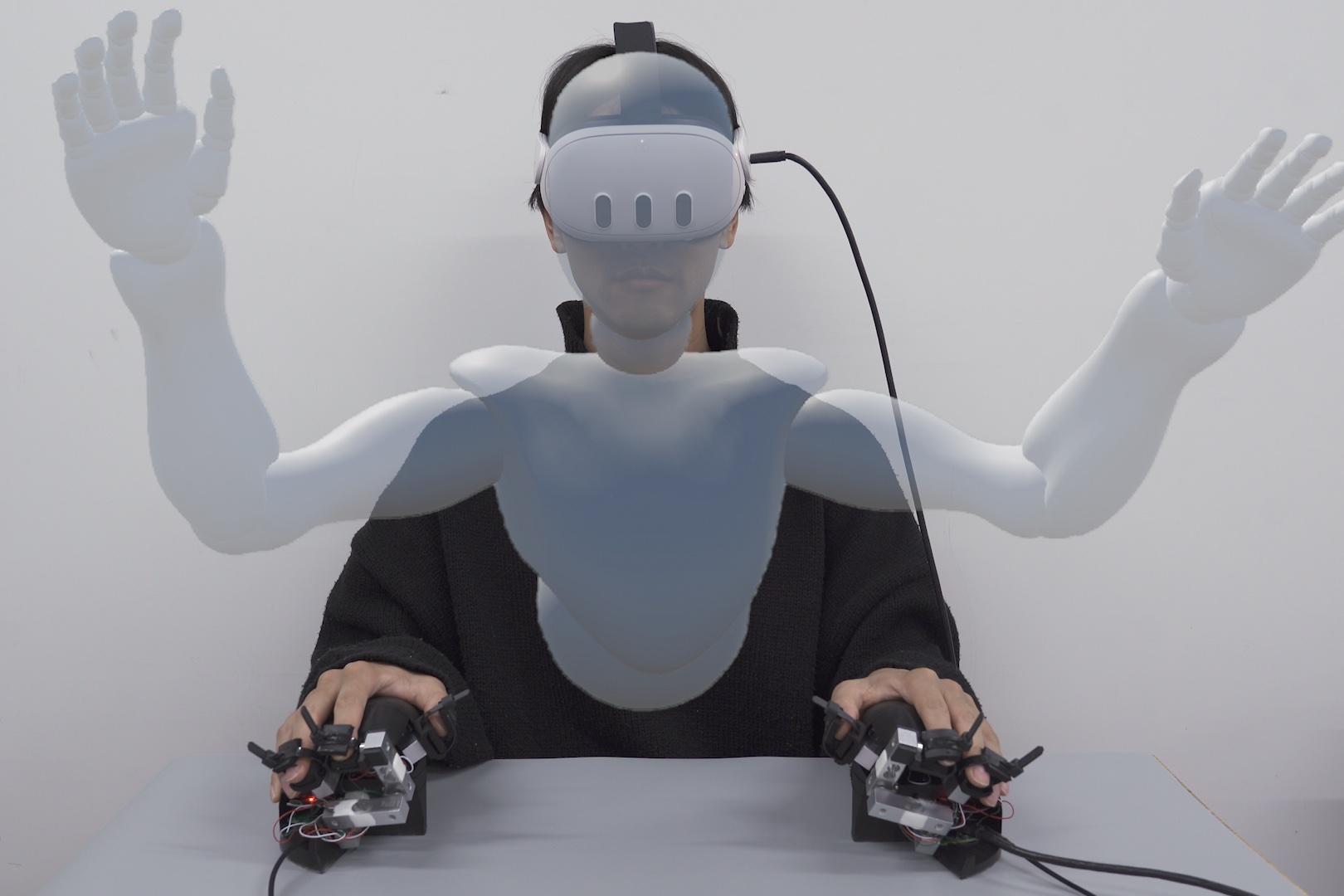
セルフリオネット:指先力入力システムによる全身アバタ操作と多様な触覚インタラクションの実現
〇平尾 悠太朗(奈良先端科学技術大学院大学)、橋本 健(東京大学) - 本論文では指先の力入力操作によってバーチャルアバタ全身の身体化を可能とするシステム,セルフリオネットを提案する.提案システムは指先の力入力のみによってアバタの身体全身の操作や歩行を実現できるだけでなく,バーチャル物体や環境の物理特性に応じて操作に必要な力入力量を変化させることで,バーチャル物体の重さや硬さといった触覚特性や,水中や沼道,坂道などのバーチャル環境の触覚的表現を可能とする.
- 3D1-02
-
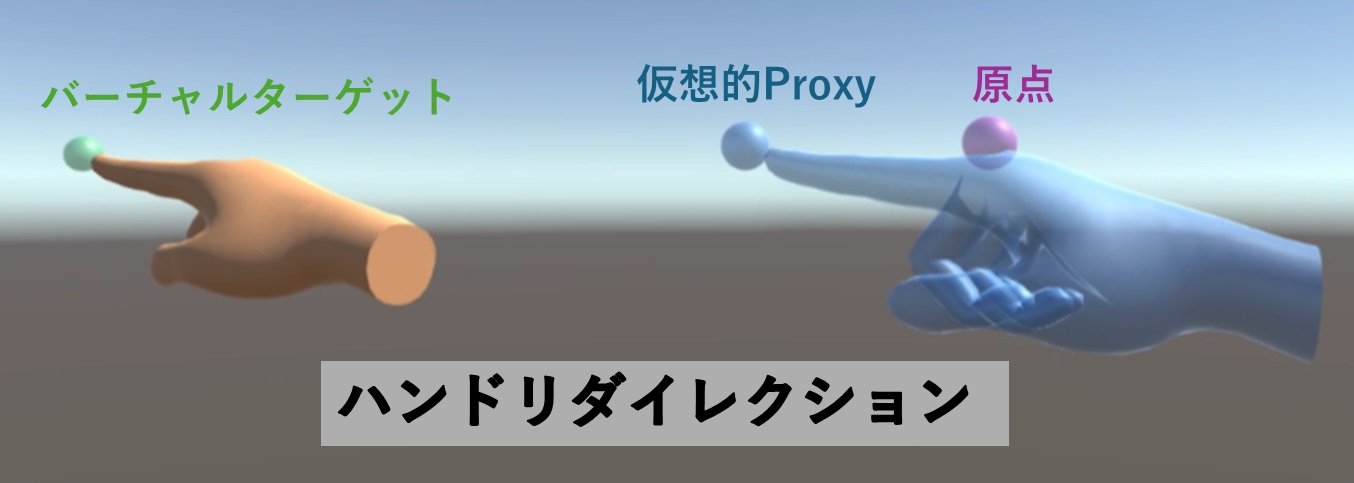
ハンドリダイレクションを用いたリーチング運動に適用可能なゲインの調査
〇金谷 崇文(東京大学)、中村 拓人(東京大学)、松本 啓吾(東京大学)、葛岡 英明(東京大学) - ハンドリダイレクション(HR)とは現実の手と異なる位置・姿勢にVR空間上の手を視覚提示する技術であり,リハビリテーションの分野で手のリーチング距離を延長して訓練効果を高めることが期待されている.HRは行為主体感などの主観評価を低下させる可能性があるため,適用可能なゲインを明らかにする必要がある.本研究では,異なるゲインを提示してリーチングタスクを行うことで主観評価の変化を検証し,適用可能なゲインを求めた.
- 3D1-03
-
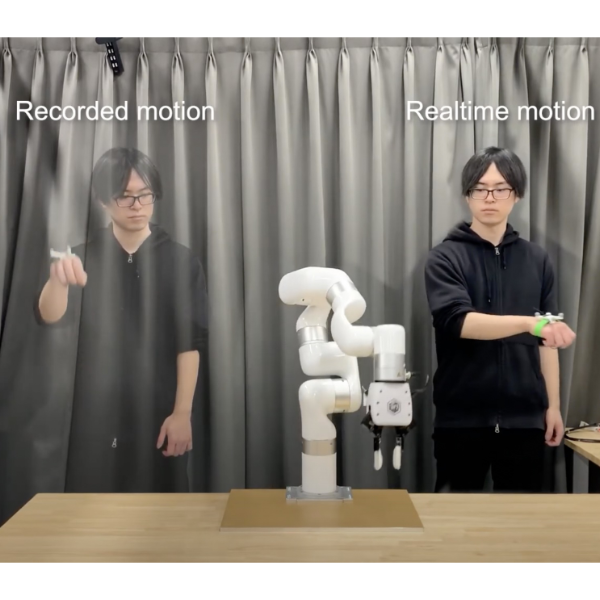
ロボットアバターを通した自己データとの融合による運動学習に関する予備的検討
〇萩原 隆義(慶應義塾大学大学院メディアデザイン研究科)、湯川 光(名古屋工業大学)、脇坂 崇平(慶應義塾大学大学院メディアデザイン研究科)、田中 由浩(名古屋工業大学)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科) - 2人で1つのアバターを操作する「融合アバター」に関する研究では、参加者2人を融合する手法や、事前に記録した教師役データと融合する手法が用いられてきた。本研究では、事前に記録した自分自身のデータと融合することによる運動学習効果について予備的検討を行った。自分自身との融合は、相手とのタイミング調整などが必要なく、自己の技能を再投入することにより、従来の運動学習とは異なる効果が期待できる。
- 3D1-04
-
幼児の身体化感覚における手足の視覚運動同期と空間配置の効果
〇吉田 優太(豊橋技術科学大学)、板倉 昭二(立命館大学)、北崎 充晃(豊橋技術科学大学) - 成人では,手足のみが身体運動と同期する「透明身体」に対してフルボディアバターと同程度の身体所有感,行為主体感が生じる.本研究では4歳から5歳の幼児における透明身体への身体化感覚に,身体運動の時間的同期性と身体配置の空間的整合性が与える影響を調べた.その結果,幼児では非同期・非整合の条件でも,同期・整合の条件と同程度の身体化感覚が誘発された.
- 3D1-05
-
共同リズム動作の学習における融合身体の効果
〇福田 晴紀(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学) - 二者が互いを見ながらリズム動作を行うと,個々の運動軌道と二者間の同期が安定化することが知られている.本研究では,共同リズム動作練習における融合身体の使用が個々の運動と二者間の同期性を改善するか検証した. 実験の結果,融合身体の使用を通じ個々の動作が安定しやすいテンポ・リズム条件があることが示された.一方,一部の条件で融合身体の使用中にのみ二者間の運動同期の安定性が上昇することが示された.

- 3D1-06
-
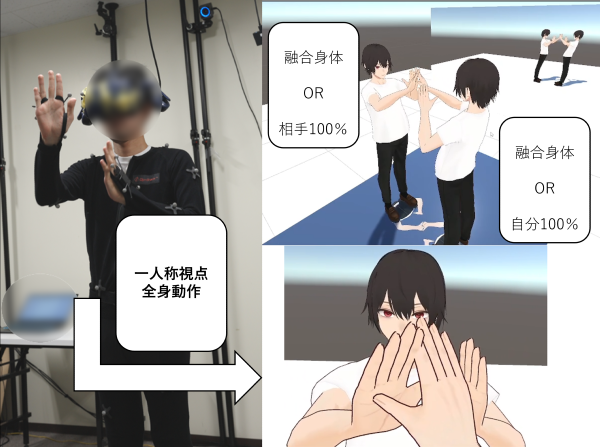
融合身体を用いた対称性のあるアバタインタラクションにおける相手アバタに対する身体性生起に関する基礎調査
〇後藤 拓海(電気通信大学)、櫻井 翔(電気通信大学)、野嶋 琢也(電気通信大学)、広田 光一(電気通信大学) - 複数人の動作を合成したアバタである融合身体は互いの姿勢を加重平均し,一人称視点で身体を共有する.本研究では2人で行う対称性のあるインタラクションに融合身体を導入し,一人称視点からも第三者視点からも融合身体と相互作用できる環境を作成した.実験を通して,自身や相手に適用する融合の有無やアバタの外見の同一性によって,インタラクションの相手に対して生起される身体性に影響を及ぼすかを調査した.
- 3D1-07
-
ポータルを使った身体の分裂と自己位置の拡張
〇近藤 亮太(東京大学)、杉本 麻樹(慶應義塾大学) - バーチャル身体を左右に分裂させ,それに所有感を誘発することで,自己位置が拡張される。しかし,分裂によって所有感は弱くなること,身体近傍空間外の身体には所有感が生じないことがわかっているため自己位置の拡張範囲には限界がある。本研究では,ポータルを使って身体のつながりを補完することで,分裂した遠くの身体に所有感が生起し,自己位置が拡張されるか調べた。

- 3D1-08
-
リアルアバターを用いた自己他者認知に関する基礎的検討
〇丸山 翔大(早稲田大学)、河合 隆史(早稲田大学) - VRにおいて、3Dスキャンによるリアルアバターを使用することは、どのようなユーザー体験をもたらすのか。本研究では、自己のリアルアバターと他者のリアルアバターを使用する場合で、自己身体感覚にどのような影響があるか調べるとともに、他者が自己のリアルアバターを使用する場合、ユーザーは他者に対してどのような対人認知に至るのか、基礎的な検討を行った。

- 3D1-09
-
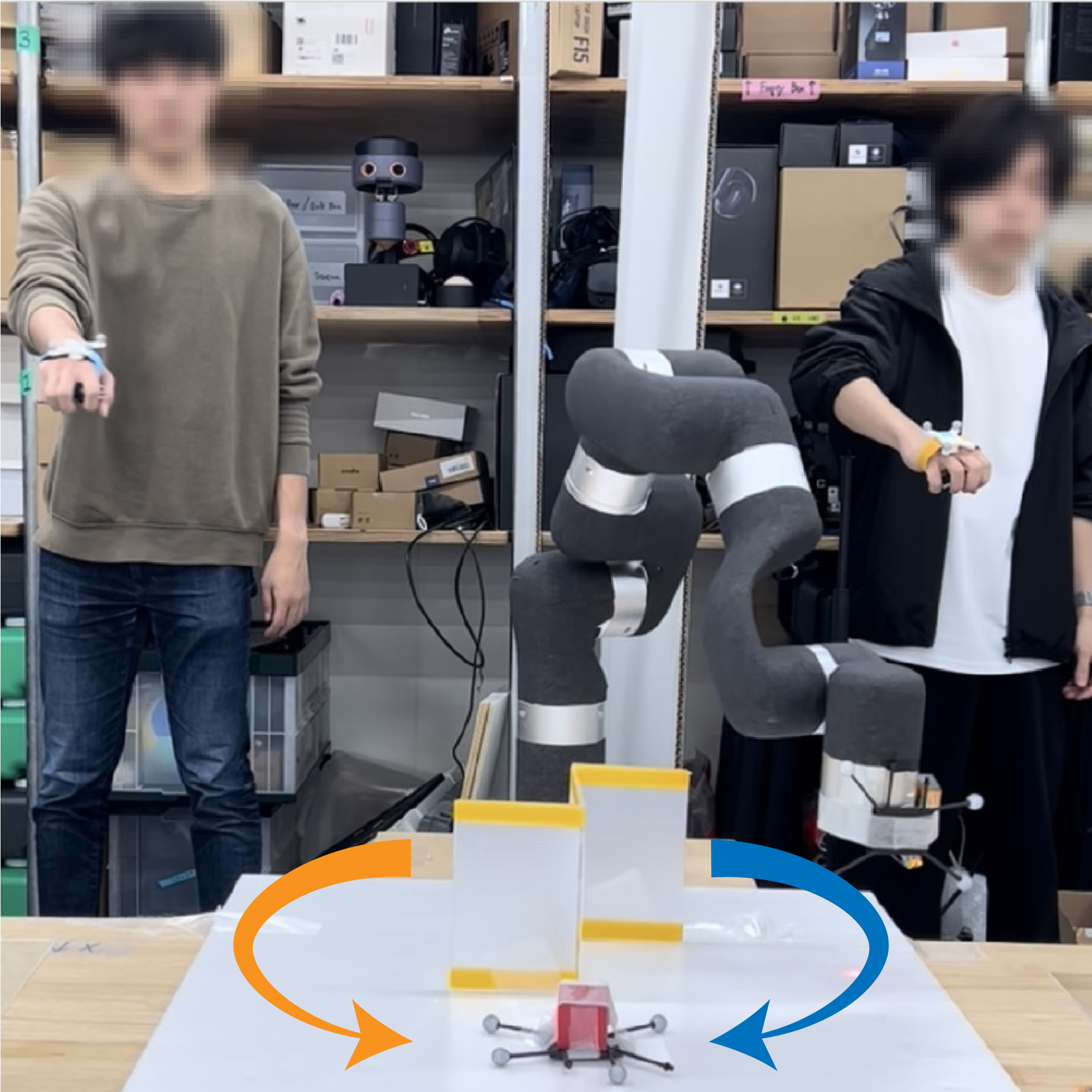
融合身体における意思決定過程とリーダーシップの動態
〇橋浦 健太(慶應義塾大学、東京大学)、高田 一真(慶應義塾大学、沖縄科学技術大学院大学)、萩原 隆義(慶應義塾大学)、脇坂 崇平(慶應義塾大学)、南澤 孝太(慶應義塾大学) - 加重平均型融合身体は,参加者同士の協力により認知負荷を分散させ,1人で操作することが難しい動きの達成や運動学習の促進が図られている.これまでの実験では,2人の参加者が"協力"して課題を達成していたが,協力している間に生じる意思の"競合"についてはほとんど着目されていない.そこで本研究では,2人が部分的に競合する意思決定過程を含むリーチング課題を実施し,参加者が競合をどのように解決するのか調査した.
- 3D1-10
-
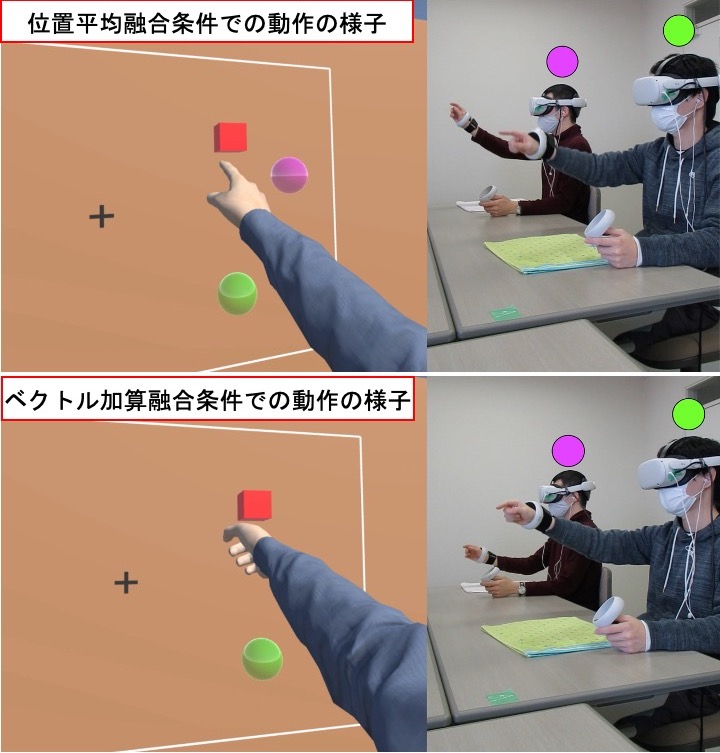
融合身体下での動作における融合方法の比較ー位置平均方式とベクトル加算方式ー
〇森田 磨里絵(立命館大学 情報理工学部)、藤原 侑史(立命館大学 情報理工学部)、中村 哲朗(立命館大学 情報理工学研究科)、松室 美紀(Department of Communication, Cornell University)、柴田 史久(立命館大学 情報理工学部)、木村 朝子(立命館大学 情報理工学部)、北川 智利(立命館大学 BKC社系研究機構、吉賀心理学研究所) - 1つのVRアバタを複数人が同時に操作する融合身体を用いると,各個人が単独で動作を行うよりも運動効率が高まる.本研究では,複数人の動作の融合方式として,操作者らの動作ベクトルを加算した結果をアバタに反映させるベクトル加算方式を採用した融合身体システムを構築した.これまでの研究で広く採用されている,操作者らの身体位置の平均をアバタに反映させる位置平均方式での融合と比較し,ベクトル加算方式を採用した融合身体下での身体動作の特徴について議論する.
- 3D1-11
-
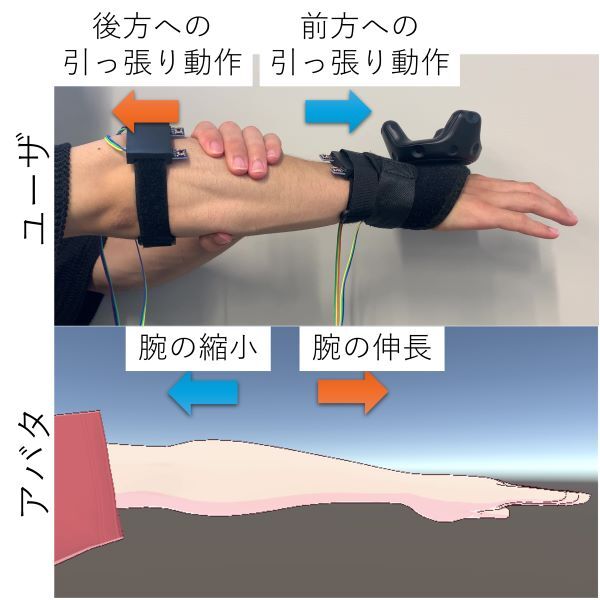
引っ張り動作による前腕の皮膚変形計測に基づいたアバタの腕の伸縮
〇小山 裕雅(立命館大学大学院)、中村 文彦(立命館大学大学院)、木村 朝子(立命館大学大学院)、柴田 史久(立命館大学大学院) - 本研究では,前腕の引っ張り動作を用いてアバタの腕を伸縮する手法を開発した.前腕の引っ張り動作に伴う皮膚変形を反射型光センサによる計測と機械学習によって認識し,認識結果を基にアバタの腕を伸長・収縮した.本手法がリーチング課題におけるパフォーマンス・身体認知に与える影響を検証するために,ユーザ実験を行った.実験結果から,前腕を引っ張る動作により,自身で腕を伸縮している感覚が強くなることが示唆された.
- 3D1-12
-
バーチャル共有身体での手位置追跡課題における心拍同期の研究
〇Cedillo Rorek(豊橋技術科学大学 大学院工学研究科 情報・知能工学専攻)、HAPUARACHCHI HARIN(豊橋技術科学大学 大学院工学研究科 情報・知能工学専攻)、北崎 充晃(豊橋技術科学大学 大学院工学研究科 情報・知能工学専攻) - バーチャルリアリティ空間での手位置追跡課題において、一つのアバターを制御している二人の参加者の心拍同期および追跡課題の精度、身体所有感、行為主体感を調べた。アバターは、各自が操作する単独身体、それぞれ左右半身を操作する結合身体、二人の動きの平均合成による共有身体を用いた。結合身体あるいは共有身体では、単独身体操作に比べて、追跡精度と心拍同期が高まると予想された。
