Sept. 13 2024
9月13日
口頭発表 10:10-10:50 力覚・体性感覚
座長:牧野 泰才(東大)
- 3C2-01
-
前後屈方向のハンガー反射提示装置の開発と評価
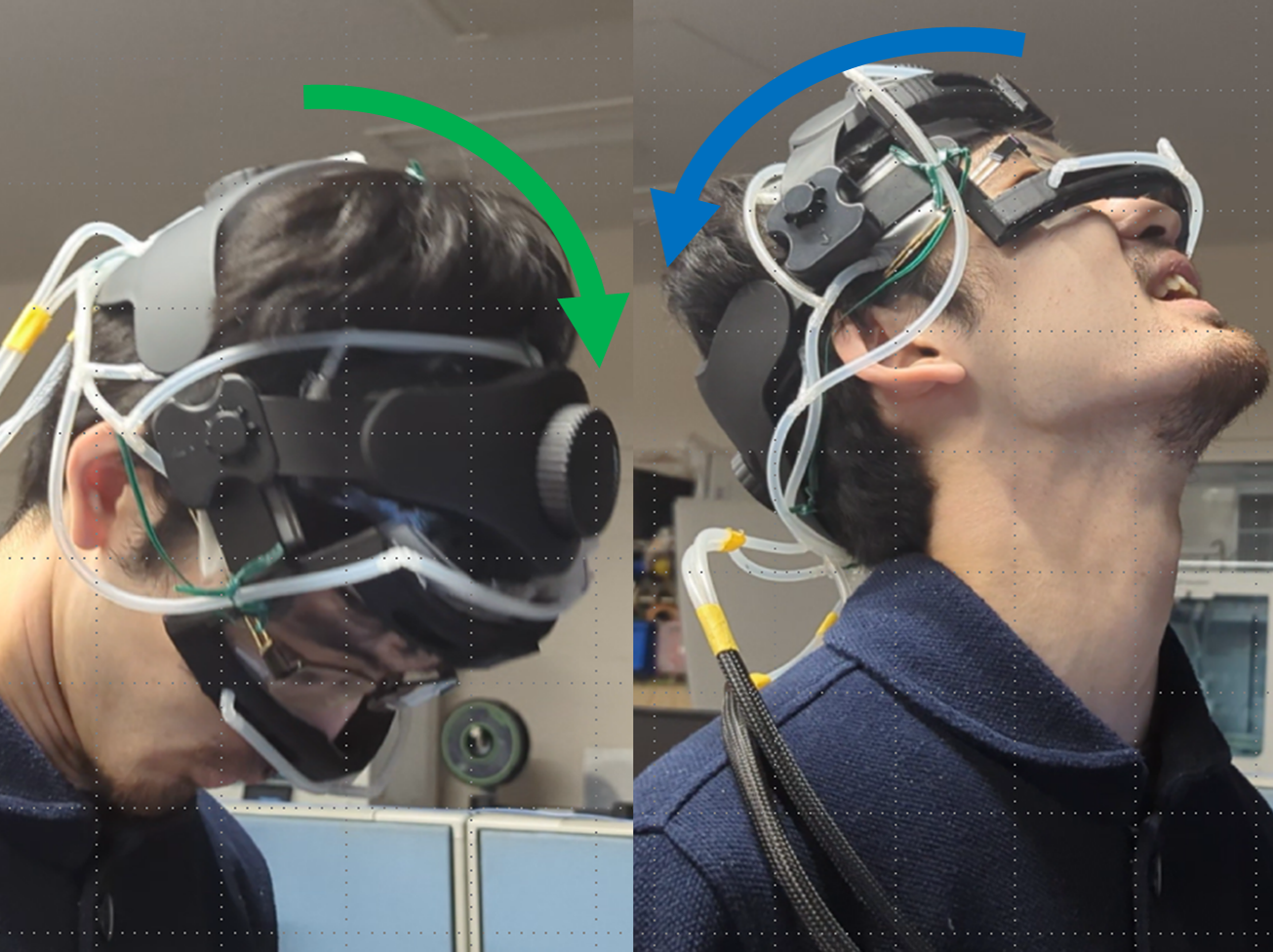
〇中村 拓人(東京大学)、葛岡 英明(東京大学) - これまでの頭部におけるハンガー反射制御装置は,ヨー軸である左右方向のハンガー反射を制御する装置であった.一方で,パッシブな装置によるピッチ軸やロール軸の力覚知覚は確認されていたが,それらを制御する装置開発には至っていなかった.そこで本研究では,新たな皮膚変形提示部位を発見することで,頭部のピッチ軸である前後屈方向のハンガー反射装置を開発した.
- 3C2-02
-
運動学習支援のための周期的かつ離散的な制動力を提示する下肢装着型デバイスの装着性向上
〇高田 崇天(筑波大学)、蜂須 拓(筑波大学)、ハサン モダル(筑波大学) - 我々はこれまでに身体運動に対する感覚刺激のフィードバックによる運動学習の支援を目的に,膝関節の屈伸角度に応じて周期的かつ離散的な制動力をフィードバックするデバイスの設計・開発に取り組んできた.本デバイスの装着性には課題があり,使用者の実際の膝関節とデバイスが計測した角度の間に無視できない誤差が生じていた.本発表では,柔軟な装着性の実現によるフィードバックの質の向上を目指し,装具に蛇腹機構を,リンクにスライド機構を採用したデバイスの設計について報告する.

- 3C2-03
-
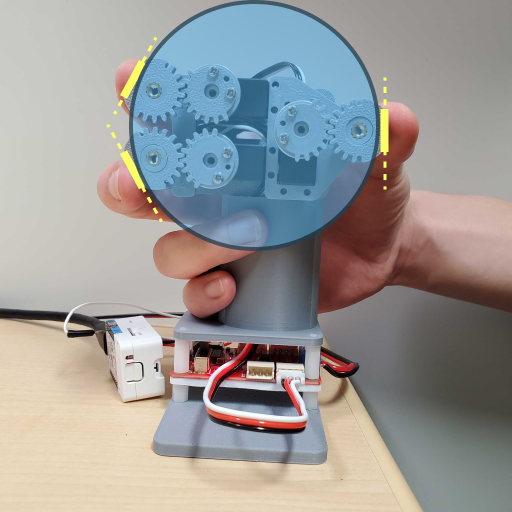
フレネルシェイプ:各指先接平面の傾きを操作する形状提示装置
〇太田 裕紀(奈良先端科学技術大学院大学)、平尾 悠太朗(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - 日常生活において人々は多様な形状の物体を把持・操作する.同様に,バーチャルリアリティ環境においても,形状を提示することが臨場感向上に寄与する.既存のハンドヘルド型形状提示装置は,指先相対位置の固定やピンアレイを利用して形状を提示しているが,これらの方法では各指先接平面の傾きという重要な感覚を再現できていない.そこで本研究では,主として各指先接平面の傾きを提示する新しい形状提示装置を提案する.
- 3C2-04
-
高低温輻射源を用いた非接触温度ディスプレイの心理物理評価
〇久米 祐一郎(電気通信大学、平由商店研究部)、水野 統太(電気通信大学)、松倉 悠(電気通信大学) - 体表温度より高温および低温の輻射源からの遠線外線を制御することにより非接触の温度情報提示が可能である。また遠赤外線をシャッターで制御することにより、高速で輻射の変化が可能である。本研究では高温および低温輻射源にセラミックヒータと保冷材を各々用いた顔面に温冷感を生起させる非接触温度ディスプレイを試作し、遠赤外線をギロチンシャッターにより高速制御したときの温度感覚を心理物理的に測定し評価した。

- 3C2-05
-
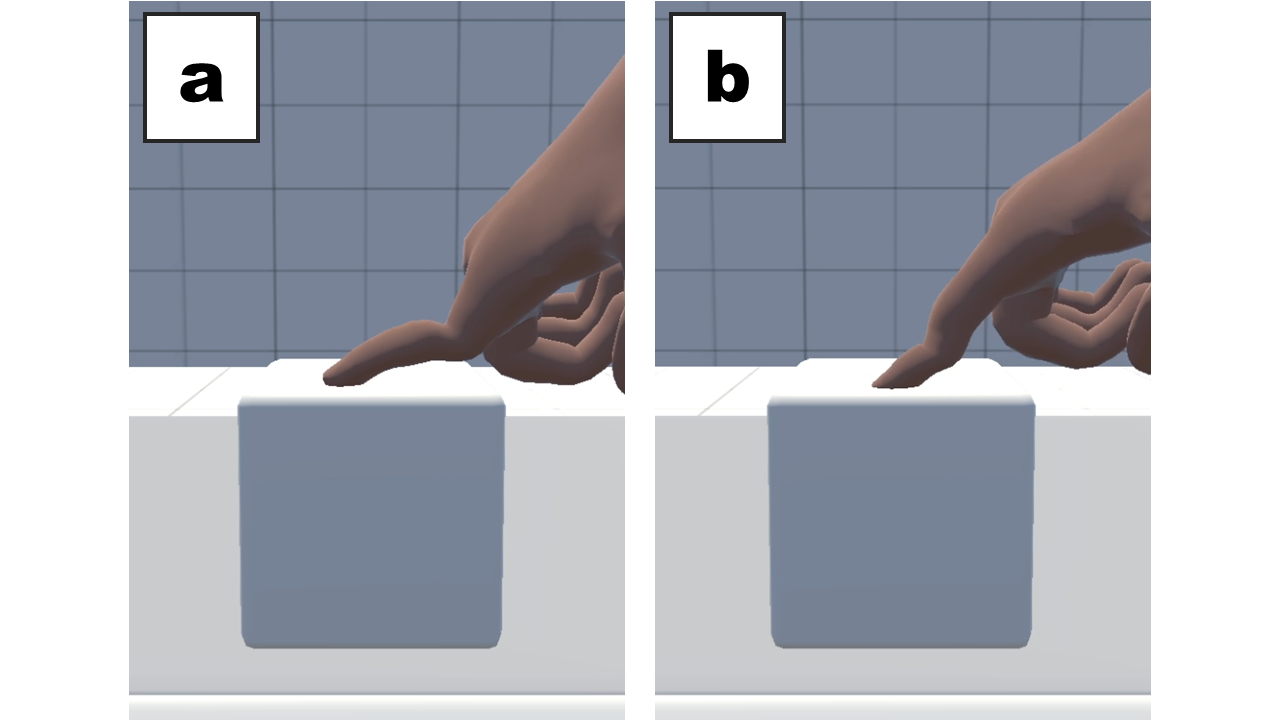
疑似触覚を用いたフィードバックとして最適なバーチャルハンドの指関節変形角度の調査
〇林 大智(明治大学)、森本 浩輔(明治大学)、渡邊 恵太(明治大学) - 前研究では,VR 空間内でのオブジェクト接触時に指の第一・第二関節を無制限に曲げるシステムを提案した.その実験においてユーザはオブジェクトを押し込んでいる際,オブジェクトとの接触感を錯覚し,また,この錯覚の起こりやすさは指関節変形の大きさと関係している可能性が示唆された.本実験では,その仮説の検証のため,上下法を用い最も疑似触覚を起こしやすい指関節の変形角度の大きさを導出した.
- 3C2-06
-
非対称振動による温感の運動錯覚提示
〇伊藤 天翔(筑波大学 理工情報生命学術院)、田辺 健(産業技術総合研究所 人間情報インタラクション研究部門)、長谷川 晶一(東京工業大学 未来産業技術研究所)、家永 直人(筑波大学 システム情報系)、黒田 嘉宏(筑波大学 システム情報系) - 本研究では非対称振動が温感の運動錯覚を引き起こすか調査しその特性を検討する。温感は非接触の可視光LEDで提示し、運動錯覚には牽引力錯覚に用いられる非対称振動を適用する。温覚提示と非対称振動あるいは正弦波振動を用いた比較実験で、温度感覚に運動錯覚が生じるかに加え熱源移動時の運動感との比較や、錯覚を組み合わせた際の影響を調査した。本研究により振動子による温感の運動感提示が可能になると期待される。

- 3C2-07
-
牽引力錯覚によって生じる手関節の弾道運動と行為主体感の不一致
〇田辺 健(国立研究開発法人産業技術総合研究所)、金子 秀和(国立研究開発法人産業技術総合研究所) - 本研究では,手関節の弾道的な掌背屈運動中に牽引力錯覚を誘発し,その時の運動への影響を客観的及び主観的に評価した.実験の結果,運動の方向に牽引力錯覚を誘発した場合,錯覚なしの条件に比べて,運動の速度が有意に上昇し,運動への行為主体感が有意に低下した.速度を上昇させた要因を明らかにするために,主働筋の筋活動を調べた結果,筋電位の大きさと運動の速度に正の相関が認められた.以上の結果より,牽引力錯覚と運動の向きが一致した場合,自ら筋発揮によって動きを速めているにも関わらず,動かされた感覚(低い行為主体感)が生じることが示された.

- 3C2-08
-
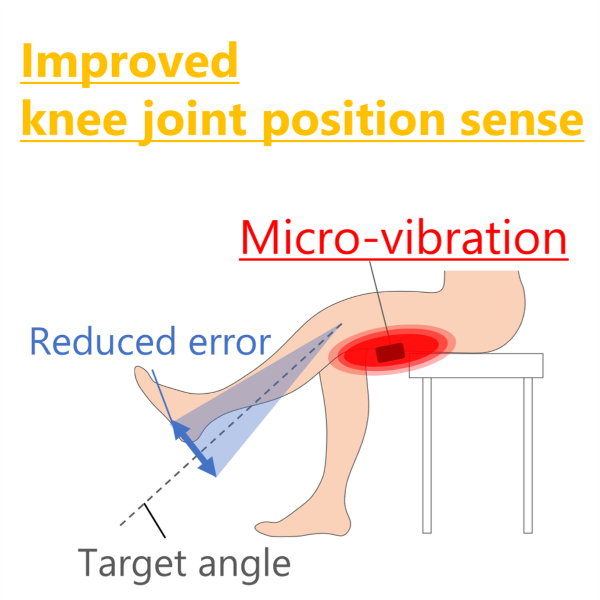
大腿後面への微弱振動印加による皮膚伸張知覚へ影響
〇清水 太陽(筑波大学)、橋本 悠希(筑波大学) - 我々は、大腿部に微弱振動を印加することで皮膚伸張知覚感度を高め、膝関節位置覚の精度を向上させる手法の確立に取り組んでいる.大腿前面への微弱振動印加による位置覚向上効果は既に報告されていることから,大腿後面に関しても同様の効果が生じる可能性がある.そこで本稿では,大腿後面への微弱振動印加によって位置覚に与える影響を検証し,その結果を報告する。
- 3C2-09
-
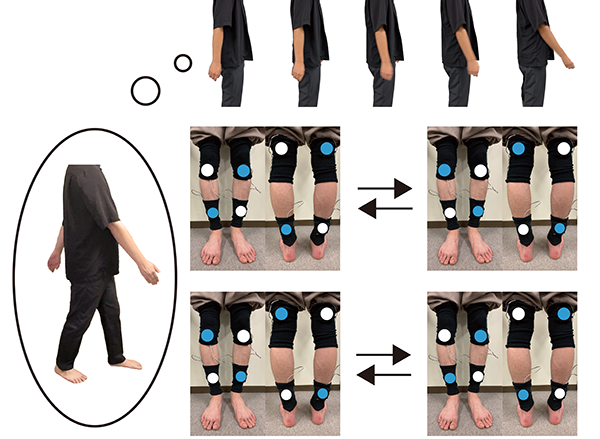
協調的な腕振り動作が運動錯覚による歩行感覚に与える主体感への影響
〇成田 叡賦(電気通信大学)、牛山 奎悟(電気通信大学)、溝口 泉(電気通信大学)、梶本 裕之(電気通信大学) - 運動錯覚は,実際の身体の動きを伴わずに運動感覚のみを提示することが可能であるが,運動に対する主体感が不脚している.そこで我々は,運動錯覚を用いた歩行感覚に着目し,協調的な腕振り動作を実動作として組み合わせることで運動錯覚に主体感を付与できるのではないかと考えた.本研究では,腕振り動作によって上腿と足首の前後への振動を切り替えるシステムを実装し,腕振り動作の有無で運動錯覚による歩行感覚に対する主体感に変化があるか調査した.
- 3C2-10
-
手掌部皮膚変形提示装置が生じさせる力知覚の評価
〇西本 和貴(東京大学)、中村 拓人(東京大学)、橋本 健(東京大学)、鳴海 拓志(東京大学) - 指先を対象として皮膚を剪断方向に変形させることによる重量感提示手法が研究され、力知覚と物理量の対応が明らかにされている。他方、手掌部は指先より皮膚変形を大きく生じさせることが可能なため、より強い力知覚を提示できる可能性がある。本研究では、手のひらの特定の2点に皮膚剪断変形を引き起こせる把持型触力覚提示デバイスおよび手掌部皮膚の変形量と生じる力知覚の関係を調査するための実験系を開発している。本稿ではこれまでに実装した実験系について紹介を行う。

- 3C2-11
-
座面への分布的な非対称振動波形が牽引力錯覚に及ぼす効果
〇福田 光輝(東京大学)、青山 一真(東京大学)、雨宮 智浩(東京大学)、中村 拓人(東京大学)、鳴海 拓志(東京大学) - 手や指に非対称振動刺激を提示すると牽引力錯覚が生じることが報告されているが,他の部位で惹起するかは確認されていない.本研究では,座面に牽引力錯覚を生じさせることで着座移動時の慣性力等を模擬して移動感を提示することを狙い,振動子を複数組み込み非対称振動刺激を分布的に提示できる装置を製作した.異なる波形および周波数の条件下で実験を行った結果,腰部および臀部でも牽引力錯覚が惹起することが示された.

- 3C2-12
-
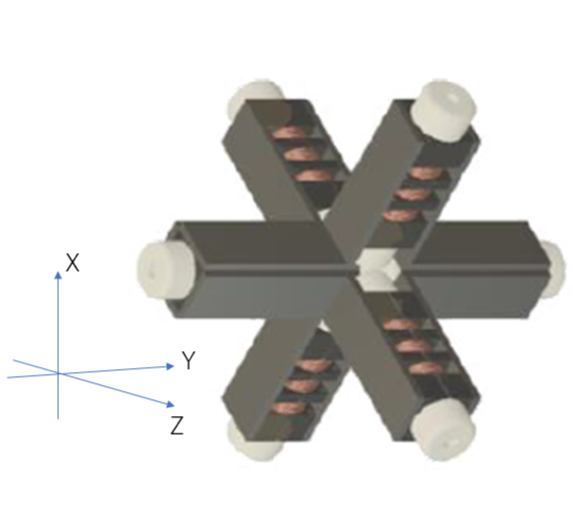
非対称振動による3次元仮想力覚デバイスの方向提示能力の検証
〇廣田 優奈(富山県立大学)、坂東 裕太(富山県立大学)、長原 末緒(富山県立大学)、西澤 昌宏(富山県立大学)、中田 崇行(富山県立大学) - 仮想力覚とは,非対称振動によって与えられる疑似的な牽引力であり,ゲームコントローラ等への応用が期待される.本研究ではX,Y,Z軸にそれぞれ対応する振動子を配置した仮想力覚提示デバイスを用いる.3軸の疑似的な牽引力のベクトル合成によって表現可能な26方向の力覚を生成し,その識別精度を調べた.26方向は立方体の中心から各面および各辺の中心と各頂点に向かう方向である.今回はその実験結果と考察を報告する.