Sept. 11 2024
9月11日
口頭発表 10:10-10:50 クロス・マルチモーダル2
座長:河合隆史(早稲田大)
- 1A2-01
-
ノイズ腱電気刺激による固有感覚精度低下を用いた超現実ハンドインタラクションへの適応促進
〇小川 真輝(東京大学、産業技術総合研究所)、松本 啓吾(東京大学)、青山 一真(東京大学)、鳴海 拓志(東京大学) - VRでは現実の制約に囚われないインタラクションが提案されているが,新規の身体モデルへの適応の難しさから,パフォーマンスや身体化感覚の低下するという課題がある.本研究では手のインタラクションに着目し,ノイズ腱電気刺激を用いた固有感覚精度低下による新規身体モデルへの適応促進手法を提案する.本稿ではその第一段階として,固有感覚精度の測定で電気刺激量を個人最適化する方法を検証した.実験の結果,先行研究で手の身体位置認識への介入に効果があった刺激量で固有感覚精度が低下する参加者が多い傾向が見られ,今回の調整法の妥当性が一定程度確認された.

- 1A2-02
-
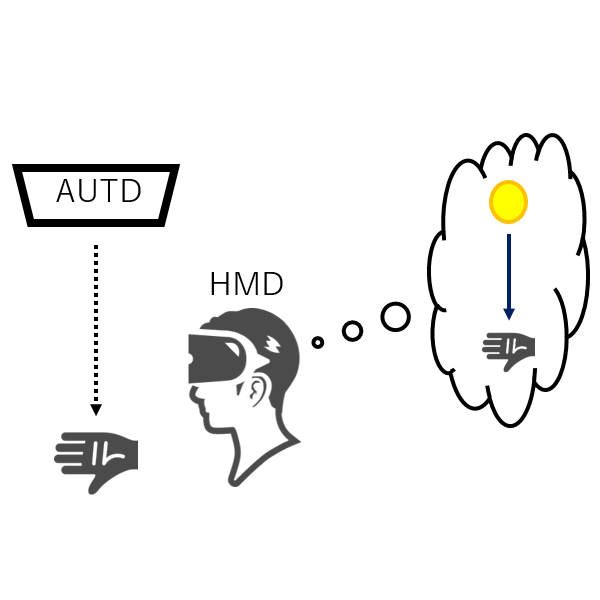
XRにおける視覚情報の提示条件が催眠体験に及ぼす影響
〇稻田 匡紀(早稲田大学)、河合 隆史(早稲田大学) - 精神的健康や医療をはじめ様々に応用可能な催眠は、機序解明や応用可能性を追求する研究が進められている。より複雑な暗示に段階的に誘導する催眠体験の流れを踏まえると、応用的な暗示の前に、まずは簡単な暗示に反応しやすくなる工夫が求められる。そこで本研究は、クロスリアリティ(XR)を用いて暗示内容を視覚的に提示することで、催眠体験にどのような影響が及ぼされるか検証した。

- 1A2-03
-
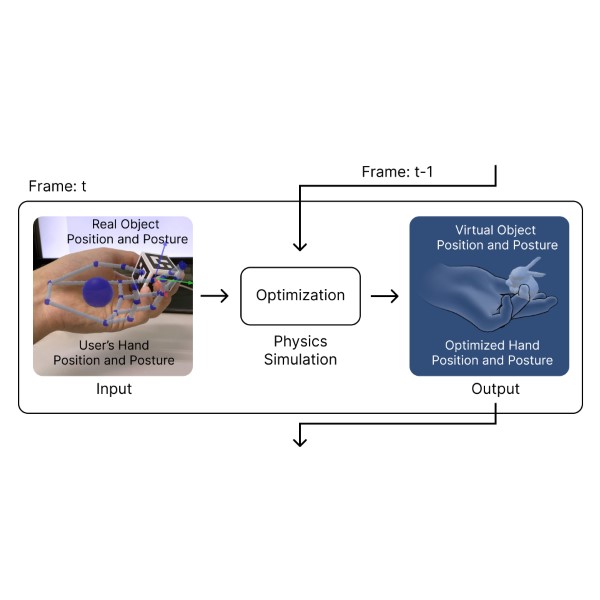
物理シミュレーションに基づく最適化による物体把持手指の姿勢生成
〇栗林 郁馬(埼玉大学)、入山 太嗣(埼玉大学)、小室 孝(埼玉大学) - 本研究では,実物体を手に持って動かすことで仮想物体を操作するシステムにおいて,自然な手指の姿勢を生成する手法を提案する.提案手法では,物理シミュレーションに基づく最適化によって,実物体とは異なる形状の仮想物体に合わせた,物理的に尤もらしい手指の姿勢を生成する.実験では,手指と仮想物体の物理的なつり合いを維持しつつ,仮想物体を把持する手指の姿勢を生成できることを確認した.
- 1A2-04
-
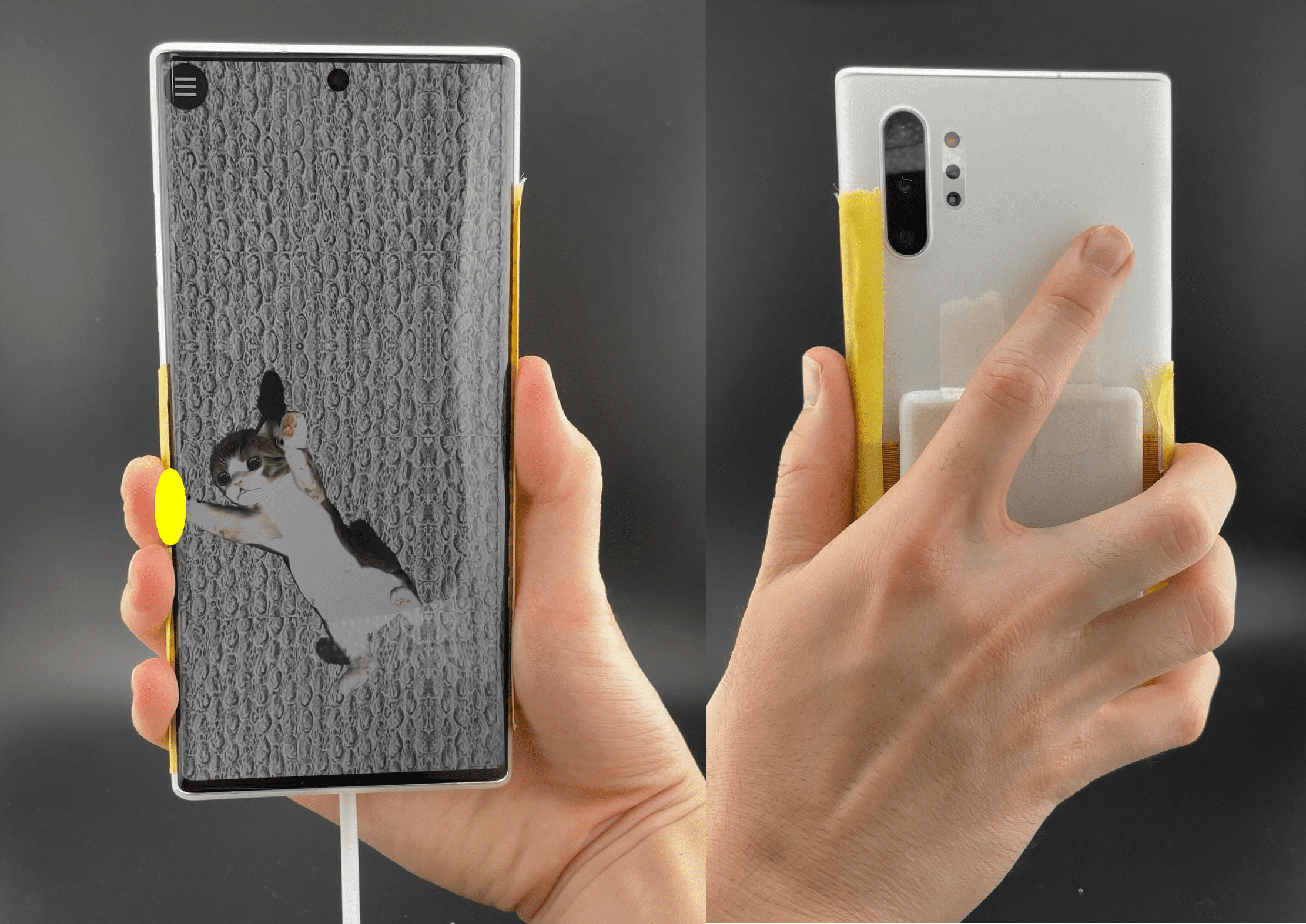
文脈改変を用いた痛みのマスキング
〇小野田 響(電気通信大学)、今 笙羽(電気通信大学)、高見 太基(電気通信大学)、牛山 奎悟(電気通信大学)、溝口 泉(電気通信大学)、梶本 裕之(電気通信大学) - 痛みを軽減させる手法はこれまで数多く提案されてきた。本研究はそうした手法の一つとして、映像コンテンツによって痛みを生じる刺激に文脈を与えることで痛みの発生原因を誤認させ、感じる痛みを軽減させる手法を提案する。本稿ではその最初の検証として、スマートフォン側面からの電気触覚提示と同時に画面にコンテンツを表示するシステムを用い、電気刺激によって生じる痛みの閾値とコンテンツの関係について検証した結果について報告する。
- 1A2-05
-
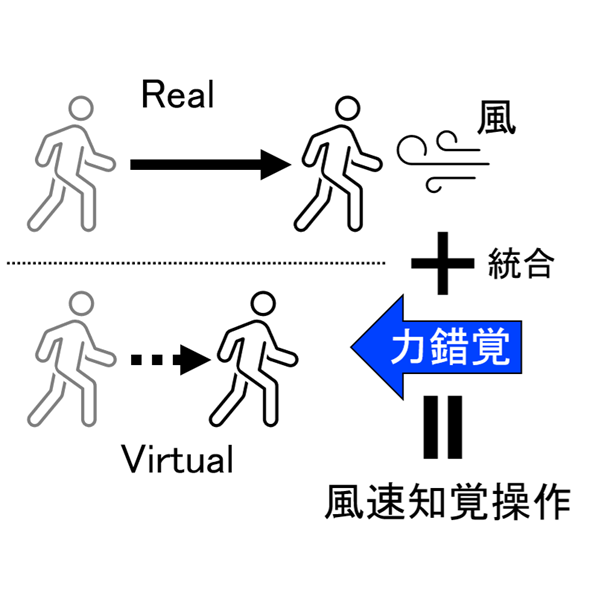
歩行の移動量操作によるPseudo-hapticsを用いた風速知覚の増強
〇鷹觜 慧(東京大学)、伊東 健一(Diver-X 株式会社)、細井 十楽(東京大学)、伴 祐樹(東京大学)、割澤 伸一(東京大学) - ファンによる強風提示では装置の大型化等が問題となる。本研究は、この課題に対しPseudo-hapticsを用いて実際の風を強く知覚させることを提案する。検証のため、VR環境で小型ファンの風を提示し、風速とpseudo-hapticsを変化させた。一部の条件で風と同方向の力錯覚により風が強く知覚される傾向があった。この結果から、風による抗力がpseudo-hapticsで強く知覚されたと推測される。
- 1A2-06
-
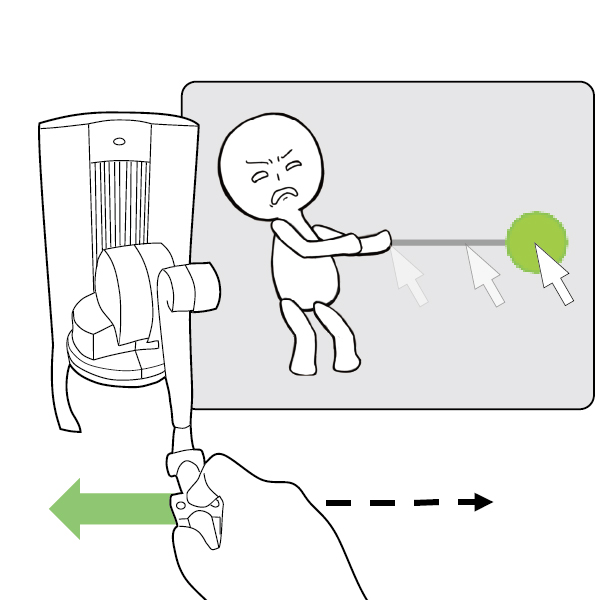
エージェントの表情により生起する力覚の物理量による定量化
〇亀岡 嵩幸(筑波大学)、松山 菜々(筑波大学)、松田 壮一郎(筑波大学)、蜂須 拓(筑波大学) - これまでに我々はディスプレイとマウスで構成された人とエージェントとのインタラクティブシステムにおいて,エージェントの表情がネガティブに変化するとニュートラルな表情と比べて大きい力覚が生起することを示した.本稿では,この力覚を物理量による定量化のため力提示装置を導入した心理物理実験について報告する.
- 1A2-07
-
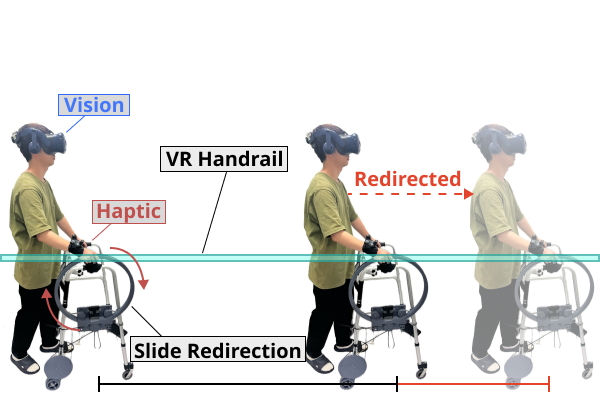
Slide Redirection: 視覚と手すりのスライド触覚の相互作用によるリダイレクテッドウォーキング
〇大橋 夢叶(奈良先端科学技術大学院大学)、松本 啓吾(東京大学大学院情報理工学系研究科)、平尾 悠太朗(奈良先端科学技術大学院大学)、ペルスキアエルナンデス モニカ(奈良先端科学技術大学院大学)、酒田 信親(龍谷大学)、内山 英昭(奈良先端科学技術大学院大学)、清川 清(奈良先端科学技術大学院大学) - Slide RedirectionはVR空間での移動感覚を変容させるシステムであり,従来の視覚操作のみの並進方向のRedirected Walking (RDW)に加えて,触覚の提示を行う.ユーザの歩行に合わせて回転する円形状の手すりにより握る際の摩擦のような触覚を提示し,並進方向のRDWを拡張する.実験の結果,Slide Redirectionを利用した際に手すりのスライドゲイン = 2.69の場合に並進ゲイン = 2.67 ± 0.39を提示可能なことが分かった.また,スライドゲインをより大きくした場合に移動距離が実際より長いことに気づく検出閾値が並進ゲイン = 3.00以上である可能性が示唆された.
- 1A2-08
-
空中超音波触覚提示における主観的衝撃感の向上
〇佐々木 大祐(東京大学)、牧野 泰才(東京大学)、篠田 裕之(東京大学) - 超音波を用いた触覚提示では物理的に大きな力を提示できないことが知られる.そのため,超音波の振幅や焦点位置の変調を行い主観的に大きな力を感じさせる研究が行われてきた.本研究では扱う刺激の種類を衝撃感(瞬時的な触覚刺激)に絞り,主観的な強度を増す提示手法について検討する.超音波の提示時間や視覚情報との相対的なタイミングを変化させる実験を行った結果,超音波の提示時間を長く引き伸ばすことで衝撃感が高まる可能性があることを示した.
- 1A2-09
- 取り下げ
- 1A2-10
-
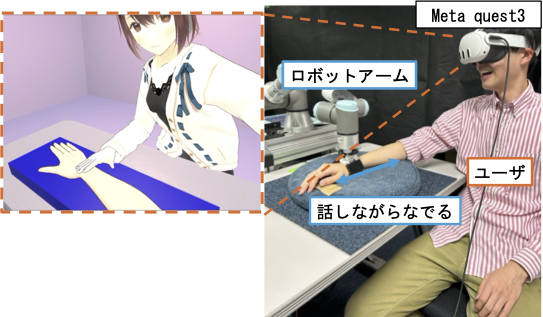
癒し体験:VR/ARエージェントによる心地よい「話しながらなでる」動作
〇新江田 航大(奈良先端科学技術大学院大学)、澤邊 太志(奈良先端科学技術大学院大学)、神原 誠之(奈良先端科学技術大学院大学、甲南大学)、加藤 博一(奈良先端科学技術大学院大学) - ロボットによる「話しながらなでる」動作は人の快感情を増加させ痛みを軽減する効果が確認されている.しかし,人間の感覚は90%以上が視覚情報であるため,どのような人が,どのように「話しながらなでる」かによって,快感情や痛み軽減効果に変化があると考えられる.本研究では,VR/AR環境で人型エージェントによる「話しながらなでる」システムを開発する.このシステムは触覚,聴覚,視覚を統合した上質な心地よい体験を提供する.
- 1A2-11
-
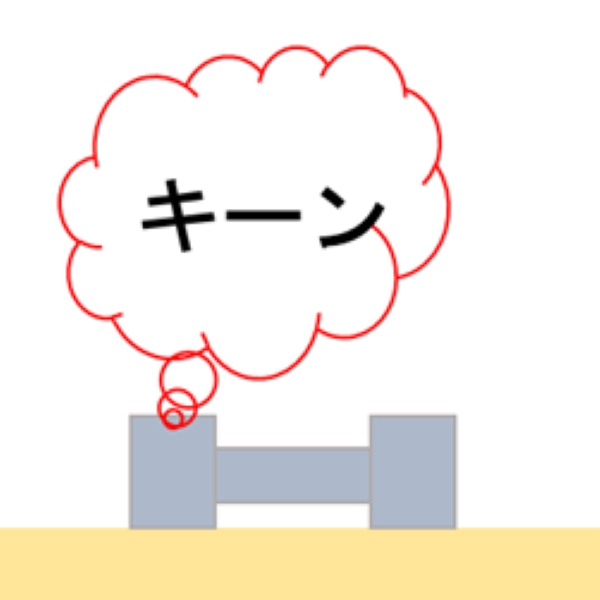
VR環境において体積の異なる物体の落下映像と付与された衝撃音が重量知覚にもたらす影響
〇外山 昂久(東海大学)、松本 隼哉(東海大学)、石毛 智哉(東海大学)、水谷 賢史(東海大学) - VRにおけるクロスモダリティの先行研究では視覚や触覚刺激を用いた報告が多く、聴覚刺激を含めた場合については少ない。それを踏まえて先に我々はダンベルの落下時に金属と木材の2つの音色の落下衝撃音を含めた映像を提示し、落下衝撃音の音高を変えると重量感覚が変わることを報告した。本研究では落下対象のダンベル状の物体の体積と落下衝撃金属音の音高を変化させ、重量感覚への影響を調査し、用途の汎用化を図る。
- 1A2-12
-
山岳トレッキングとスキーを表現するバーチャルストックと身体運動感覚の研究
〇小島 優希也(東京都立大学)、岡本 正吾(東京都立大学)、ヤェム ヴィボル(筑波大学)、池井 寧(東京大学) - ユーザが把持したストック(ポール)とペダル,サドルによって全身に運動刺激を加え 360度実写映像の空間での身体感覚をバーチャルに再現することにより,山岳トレッキングやスキーの体験を伝えるシステムを構築した.全方位の視聴覚情報に連動して提示される上肢運動刺激,下肢運動刺激,前庭感覚刺激および気流の触覚,さらに足底,サドル,手への振動触覚により,身体的追体験の形式で,映像の空間とそこでの全身運動への没入感を与えることが可能である.本論文では装置の構成と山岳登攀の表現手法とその初期的な評価およびストック感覚の特徴について述べる.
