Sept. 11 2024
9月11日
口頭発表 10:10-10:50 感覚・知覚2
座長:吉元 俊輔(大阪大)
- 1D2-01
-
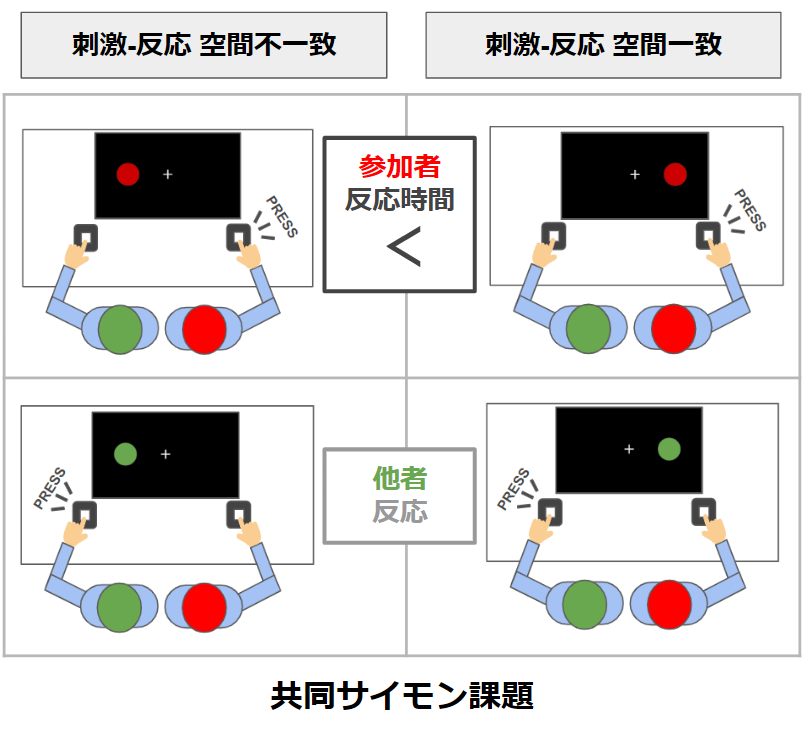
ロボットアバタとの共同行為における外見の一致が社会的サイモン効果と自他の行為主体感の生起に与える影響
〇李 暁彤(東京大学)、畑田 裕二(東京大学)、鳴海 拓志(東京大学) - ロボット等の非生物と認識されるエージェントとの共同作業では,相手が意図を持って振る舞う動作主体と認識しにくいことで,他者の行動を自身の行為プランに組み込んで集団的な協調を達成するために現れる社会的サイモン効果(SSE)が生じにくい. 他方,外見的差異が自他弁別を促進するためSSEが生じにくいという説も主張されている. 本研究では,ロボットアバタとの共同行為において,参加者自身もロボットアバタを使用することで自他の行為に対する行為主体感とSSEが生起されるかを検証した.
- 1D2-02
-
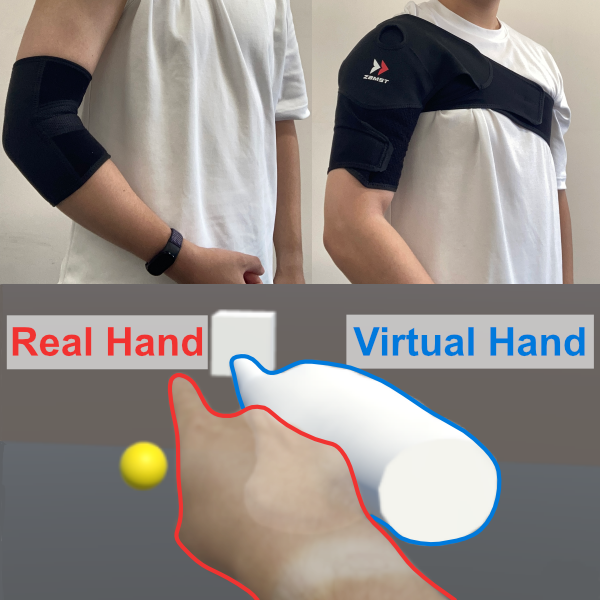
腕部サポーター装着によるリダイレクテッドハンドの知覚閾値への影響
〇福井 岳(東京大学)、松本 啓吾(東京大学)、中村 拓人(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学) - 実空間でのユーザの手の位置姿勢に操作を加えてアバタの手の位置姿勢として用いる,リダイレクテッドハンド(RDH)と呼ばれる技術が提案されている.RDHの応用範囲拡大のため,ユーザが操作を知覚する最小の操作量である知覚閾値の拡大が重要視される.本研究では,腕部にサポーターを装着し,動きに制限を与えることが,RDHの知覚閾値を拡大するかを検証し,その結果,肩部への装着に有意な拡大効果が見られた.
- 1D2-03
-
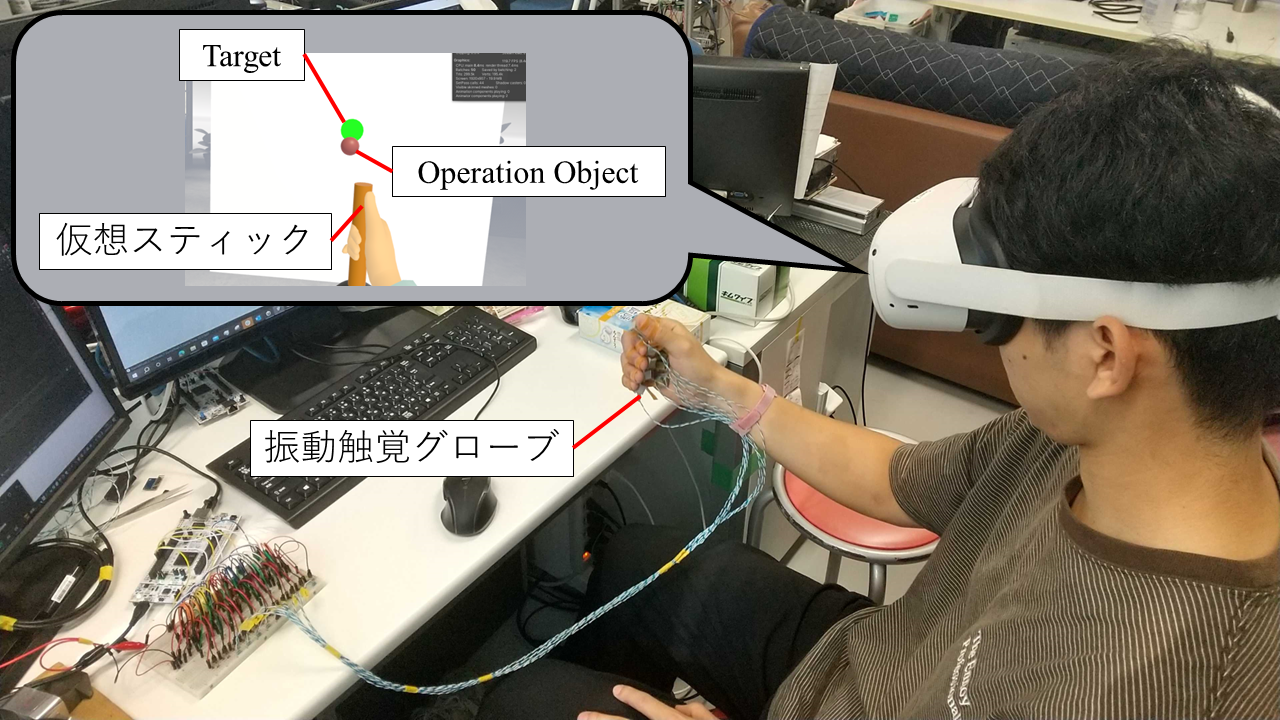
仮想環境での振動触覚グローブを用いた力分布の提示による把持動作の強調表現
〇伊藤 那月(東京電機大学)、五十嵐 洋(東京電機大学) - 本研究では物体を把持するときに手の各部にかかる力を「力分布」として、この力分布を振動触覚グローブで再現する。これにより、仮想環境での把持動作の操作性向上を目的としている。具体的には、現実の環境で物体を把持する際の力分布を測定し、仮想物体を把持するときに振動振幅を制御することでこの力分布を再現する。また、仮想環境で現実と異なる力分布を再現した場合、把持動作にどのような影響があるか調査する。
- 1D2-04
-
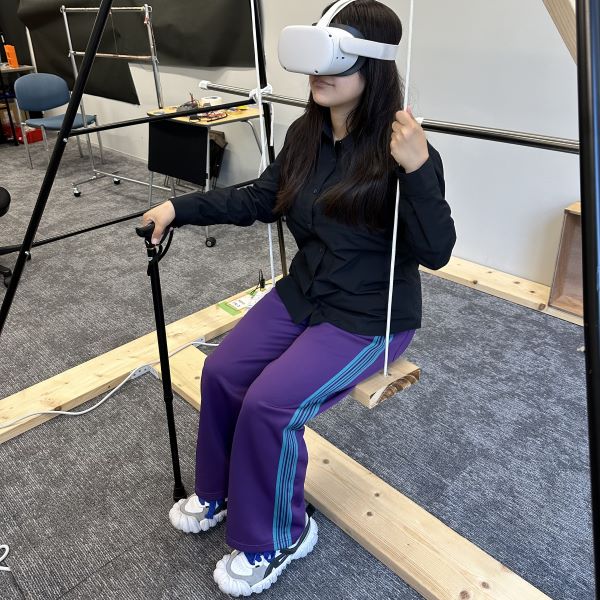
ブランコ型VRでの体の支持条件が揺動感覚に与える影響の分析
〇潘 虹羽(立命館大学)、安藤 潤人(立命館大学)、李 亮(立命館大学)、野間 春生(立命館大学) - 現在、VR酔いの現象が課題となってきている。本研究ではVR酔いを引き起こす一つの原因と考えられる揺動感覚に着目し、同じコンテンツであっても体験方法の違いが揺動感に及ぼす影響を検証した。先行研究ではブランコ型のVRの体験時に足の接地有無で揺動感覚が大きく変わるという現象を評価した。本報告ではその要因を探ることを目的として、杖や手すりなどの異なる体験条件下で実験を行い、それぞれの揺動感覚を比較評価した。
- 1D2-05
-
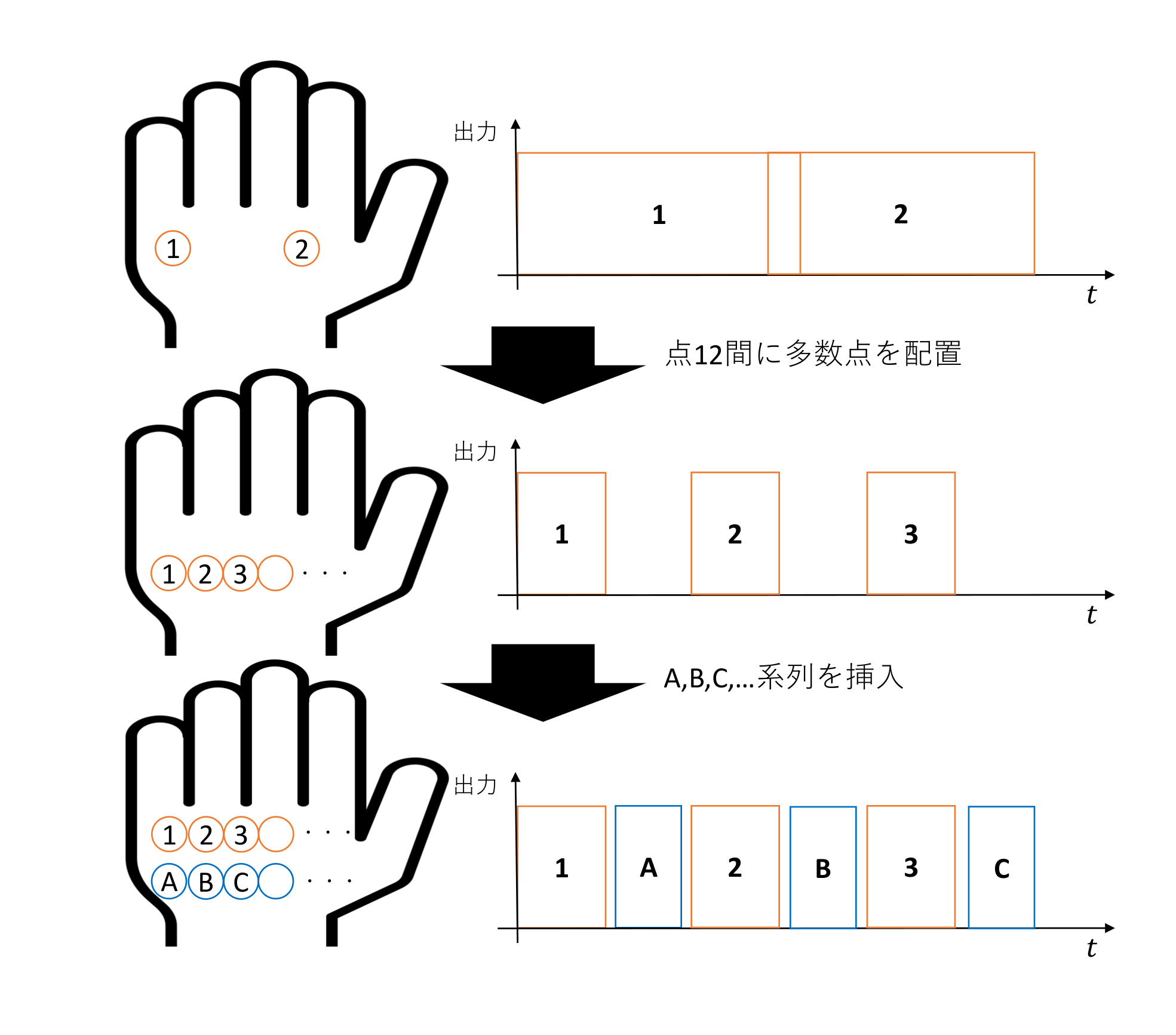
時分割超音波刺激による動的な点列の方向知覚
〇藤井 陽太(東京大学大学院情報理工学系研究科システム情報学専攻)、藤丸 晃浩(東京大学工学部計数工学科)、牧野 泰才(東京大学大学院情報理工学系研究科システム情報学専攻、東京大学大学院新領域創成科学研究科複雑理工学専攻)、松林 篤(東京大学大学院新領域創成科学研究科複雑理工学専攻)、篠田 裕之(東京大学大学院情報理工学系研究科システム情報学専攻、東京大学工学部計数工学科、東京大学大学院新領域創成科学研究科複雑理工学専攻) - 触覚刺激を離散的に移動させた際,刺激の提示時間間隔が小さい場合に限り,連続的な移動感を知覚する仮現運動が生じる.一方で空中超音波触覚ディスプレイ(AUTD)の強みとして刺激位置を微調整できることが挙げられる.このことを活用して刺激間距離を詰めることで提示時間間隔を広げ,空き時間に別の点を提示することで複数点の独立した刺激を提示することができる.本研究ではこのような時分割な点列提示における,複数点列の提示が知覚に与える影響について検証を行った.
- 1D2-06
-
生理指標を用いたVR空間と実空間の空間デザインによる影響の比較
〇小林 鷹智(芝浦工業大学大学院)、菅谷 みどり(芝浦工業大学大学院)、Jadram Narumon(芝浦工業大学大学院) - 近年,空間デザインの現場では,経済性の観点で空間評価にVRが用いられる.しかし,VR空間を見た後に実空間をみると,空間から受ける印象や影響が異なることがある.この場合,VRの空間評価の信頼性が低くなる課題がある.本研究では,VR空間と実空間の影響の差を事前に明らかにし,信頼性の低下を防ぐことを目的とする.実現のため,脳波・心拍指標を用いてVR空間と実空間を見た際に受ける影響の差を評価する.

- 1D2-07
-
視野反転研究における前後反転の導入による回転と並進の分離
〇山﨑 駿(大阪大学)、横山 喜大(大阪大学)、原 彰良(大阪大学、脳情報通信融合研究センター)、古川 正紘(大阪大学、脳情報通信融合研究センター)、前田 太郎(大阪大学、脳情報通信融合研究センター) - 視覚運動協応学習の解明を目的とする逆さめがねを用いた視野の左右反転・上下反転の研究は,光学系の制約から前後反転条件が未実施でありかつ,反転条件における回転と並進の分離がなされてこなかった.そこで本研究では,左右・上下・前後の3軸の反転の組合せ全8条件を網羅することで,頭部の並進・回転の反転条件を独立に設定した実験統制法を確立させた.歩行タスク・頭部回転タスクいずれにおいてでも,全反転条件が無反転条件と所要時間が最小化する傾向が再現されたことから,実験統制法の妥当性が示された.
- 1D2-08
-
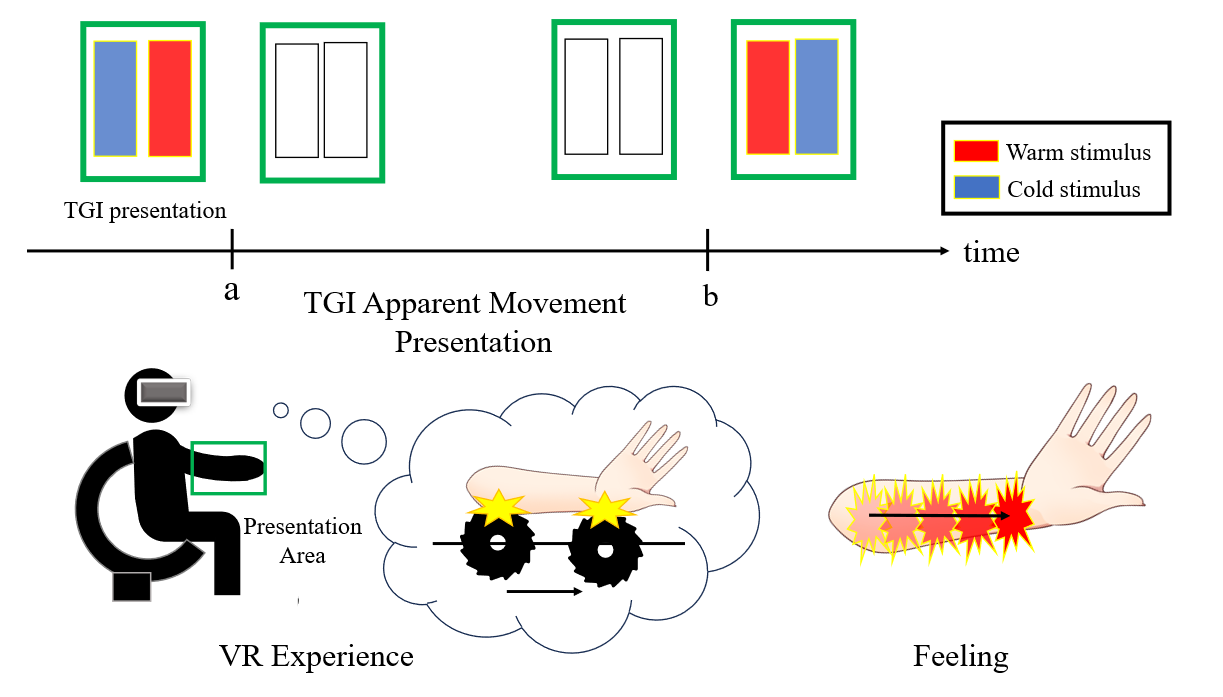
仮現運動による痛み錯覚の移動感提示装置の開発
〇水野 蒼太(筑波大学)、許 佳禕(東京大学)、長谷川 晶一(東京工業大学)、家永 直人(筑波大学)、黒田 嘉宏(筑波大学) - 知覚位置を移動可能な痛み感覚提示は、運動する物体による痛みや動作に応じた痛みを再現する上で重要である.例えば工業機械により掻傷が生じるときや腕を熱湯に浸したときなど,刺激知覚は動的かつ連続的である.本研究では動的かつ連続的な痛み錯覚提示手法の開発を目的とする.仮現運動をサーマルグリル錯覚の非接触提示手法に適用し,動的な錯覚提示を実現する.また,提示時間間隔の条件による連続性への影響を報告する.
- 1D2-09
-
触覚による鼓動の知覚がバーチャルアバターの印象に与える影響の調査
〇桑島 理子(九州大学)、渡邊 淳司(日本電信電話株式会社)、Ho Hsin-Ni(九州大学) - 本研究では、バーチャルアバターの心拍振動を再現する触覚デバイスに参加者が触れる実験を行った。参加者はVTuberのビデオを見ながらデバイスに触れ、主観評価を行った。その結果、アバターとの社会的距離に有意な影響を与え、アバターのアニマシー、好感度、リアリティ、参加者のエンゲージメントが向上することがわかった。
- 1D2-10
-
スマートフォン上でのPsuedo-Hapticsを用いた食感拡張手法の提案
〇溝口 泉(電気通信大学)、梶本 裕之(電気通信大学) - 本研究ではスマートフォン上でのPsuedo-Hapticsを用いた食感拡張手法について検討を行う。現在までに咀嚼と同時にスマートフォンを握る動作を行うことで、食感を硬く変化させることができることが示唆された。本研究では、画面上に表示した食品の形状を握り動作に合わせて変化させた際の食感の変化について調査した。結果として画像の幅を握力に応じて縮めることで食感が柔らかくなる可能性が示唆された。
- 1D2-11
-
時系列で振動刺激を与えた時のファントムセンセーション発生条件
〇野口 雄弘(東京電機大学大学院)、山本 拓実(東京電機大学)、井上 淳(東京電機大学) - 足裏に振動刺激を与えることでユーザに対し実際の歩行を行わせずに歩行時の重心移動を再現できると考えた.再現を行う方法としてファントムセンセーションに注目した.ファントムセンセーションを用いると振動刺激を与える場所を変えずに振動源の位置を錯覚させられる.与える振動には強さや大きさ,周波数,変化の割合など多くのパラメタが存在する.足裏において,周波数と刺激時間が影響することが分かった.

- 1D2-12
-
振動周波数の変動による足裏の感覚受容範囲の変化
〇野口 雄弘(東京電機大学大学院)、山本 拓実(東京電機大学大学院)、井上 淳(東京電機大学大学院) - 着座姿勢において歩行感覚の提示を目的として,ボイスコイルモータを用いて,足裏に周波数・振幅・加振時間を調整可能な振動刺激を与える。振動定時位置ごとに特定の周波数を閾値として刺激受容範囲の拡大,縮小がみられた。また,連続して振動を提示する際,与える振動周波数の高低の順序の変動や振動提示時間を増加させることで,足裏の感覚を鋭敏にできることを明らかにした。
