Thursday, 12 September
9月12日(木)
B会場 歩行・移動
座長:前田太郎(阪大)
- 6B-01
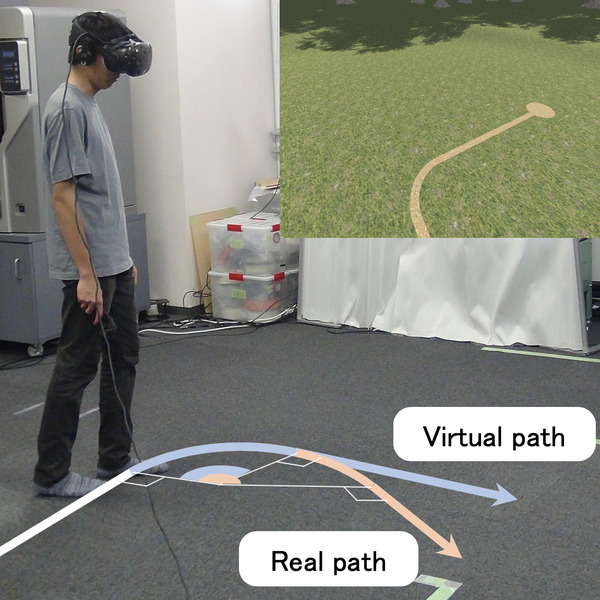
- バーチャル障害物を用いたRedirected Walking手法の検討
〇松本 啓吾(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学)、廣瀬 通孝(東京大学) - 広大なバーチャル空間を限られた大きさの実空間で実際に歩き回ることを可能にするRedirected walkingと呼ばれる方法論が提唱されている.Redirected walking手法の多くはユーザに知覚されない範囲内でユーザの移動方向および移動量を変化させることを試みているが,実際はリセットと呼ばれる強制的な操作が必要とされユーザ体験を損ねていた.本稿ではあえてバーチャル空間上に障害物を提示しユーザが障害物を回避する際に知覚されない操作を行うことでリセットを回避する手法を提案する.
- 6B-02
- 旋回量操作型リダイレクション手法の検討
〇水谷 純也(東京大学)、松本 啓吾(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学)、廣瀬 通孝(東京大学) - 自然な歩行感覚を提示しながら,限られた実空間で広大なバーチャル空間を歩き回ることを可能にする,リダイレクションという手法が提案されている.しかし現在提案されている操作ゲインでは,回転量を操作する際に立ち止まらないと歩行経路にずれが生じてしまう.そこで本研究では,歩行経路を統制しながら,立ち止まらずに旋回する際の旋回量を操作する旋回ゲインを提案し,その閾値を検証する.
- 6B-03
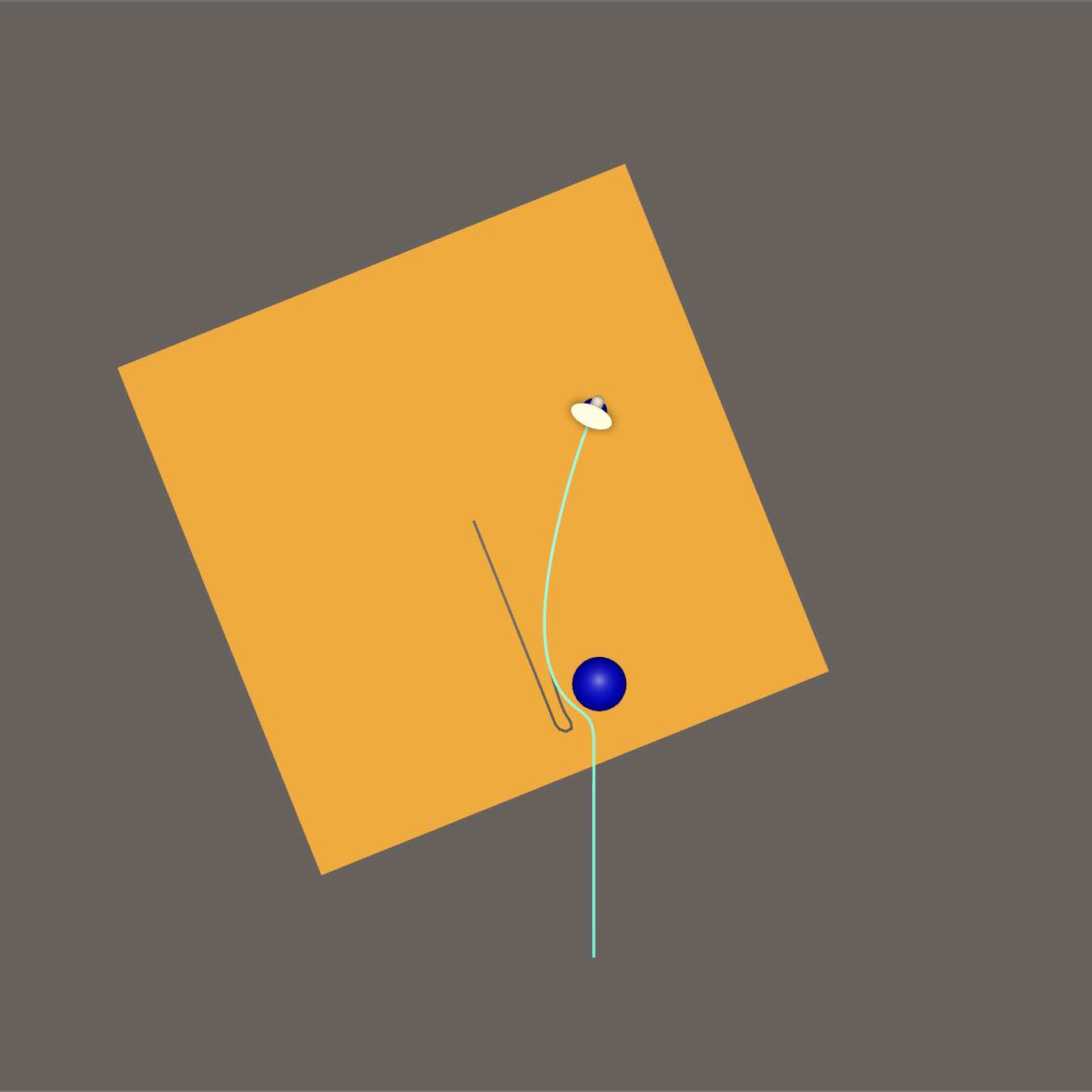
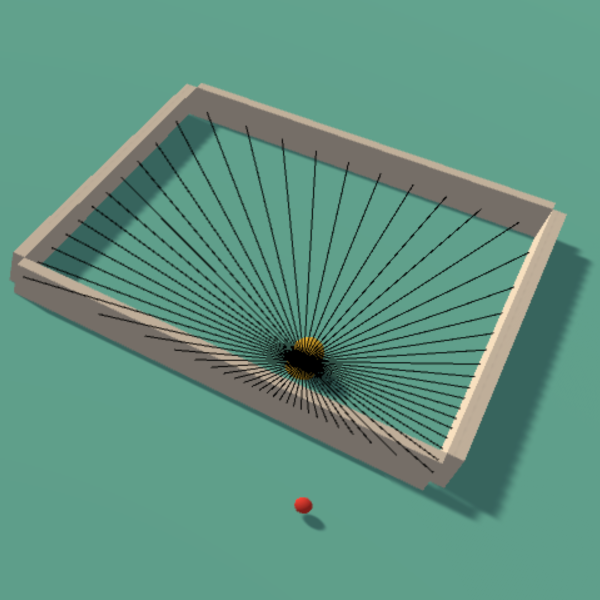
- 強化学習を用いた回転量操作型リダイレクションコントローラの構築
〇張 祐禎(東京大学)、松本 啓吾(東京大学)、鳴海 拓志(東京大学)、葛岡 英明(東京大学大学院)、廣瀬 通孝(東京大学) - 本研究では、強化学習を利用し汎用性のある回転量操作型リダイレクションコントローラを構築した。歩行体験できるバーチャル環境においてユーザーが自主回転する際に、角度に補正をかけることでユーザの進行方向を変化させる。これにより壁や障害物などに対する回避操作を減少でき、ユーザ体験の向上が期待できる。進行方向角度について強化学習を適用することで、バーチャルコンテンツの内容や現実空間の形状にとらわれず、最適な操作量をリアルタイムで出力することができる。
- 6B-04
- HMDと電動車椅子を用いたバリアシミュレータの移動距離削減の基礎検討
〇本岡 宏將(日本大学文理学部)、大河原 巧(日本大学文理学部)、呉 健朗(日本大学院総合基礎科学研究科)、大和 佑輝(日本大学院総合基礎科学研究科)、宮田 章裕(日本大学文理学部) - 我々は,HMD上の映像と,電動⾞椅⼦の低⾃由度動作を組み合わせたバリアシミュレータを提案してきたが,ユーザがシミュレーションを⾏う際,映像上の⾞椅⼦が進む距離と同じスペースを現実空間で確保する必要があった.本稿では,シミュレータの現実空間における移動距離を削減するための基礎検討として,⾞椅⼦の現実空間における移動の振る舞いと,ユーザが仮想空間で知覚する移動距離の関係を明らかにしたことについて報告する.

- 6B-05
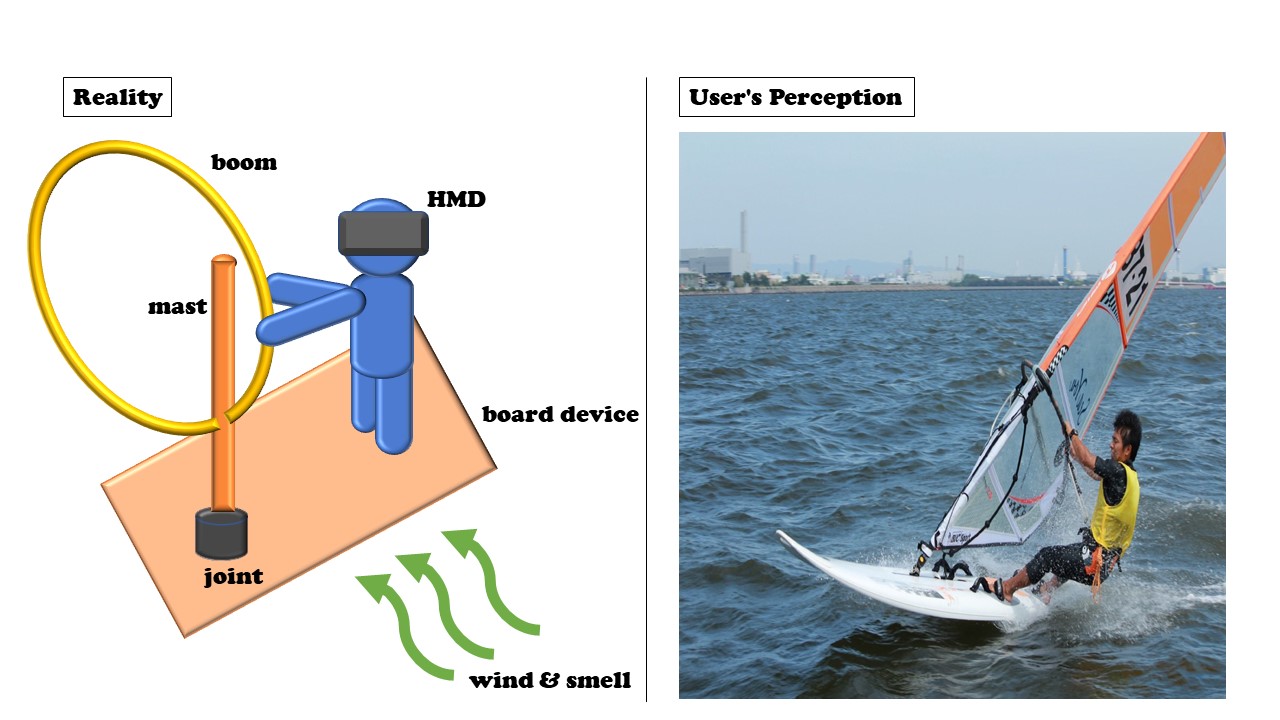
- ロボット化した電動車椅子を活用した モーションプラットフォームの構築に関する研究
〇畑中 拓(名城大学)、小田 理穂(名城大学)、笹井 大和(名城大学)、小玉 亮(電気通信大学)、目黒 淳一(名城大学) - 近年,様々なモーションプラットフォーム(MP)の開発が進んでいる中で,一般的なMPは,没入感と設置面積,コストはトレードオフの関係がある.そこで本研究では,電動車椅子をロボット化したMPの構築を行った.このMPは,LIDAR,IMU搭載することで,自己位置推定や障害物検知の機能を有している.今後は,これらの機能を活用し,MPの機能性の拡張を行うことと,回転と前後の運動による体感の調査を実施していく予定である.

- 6B-06
- 旋回歩行感覚を与える刺激提示手法に関する研究
〇末田 岳(首都大学東京)、阪 直幸(首都大学東京)、YEM VIBOL(首都大学東京)、雨宮 智浩(東京大学)、北崎 充晃(豊橋技術科学大学)、佐藤 誠(首都大学東京)、池井 寧(首都大学東京) - 本論文では,旋回歩行感覚を生成する腕振り運動提示手法をについて検証した.左右の腕で屈曲比率の異なる腕振り運動提示では,身体のねじれによる身体方位の変化が見られた.また,実際歩行時の主観的な身体方位を評価した結果,進行方向の内側となることが確認された.そのため,腕振り運動提示による身体のねじれが旋回歩行感覚を生成していると考えたが,有意差はみられなかった.
- 6B-07
- 歩行感覚の生成における能動感と受動感に関する研究
〇海野 みのり(首都大学東京)、清水 広一(首都大学東京)、雨宮 智浩(東京大学)、北崎 充晃(豊橋技術科学大学)、YEM VIBOL(首都大学東京)、池井 寧(首都大学東京) - 本研究では,前庭感覚ディスプレイ(可動座席)による VR 歩行時の歩行感覚,能動感,受動感を評価した.体験条件として,実写映像提示,聴覚提示および歩行イメージの有無を設定し,それらが上記の感覚に与える効果を比較した.実験参加者数が十分ではない段階であるが,歩行イメージと実写映像提示は,歩行感覚,能動感の増加に効果があることがわかった.聴覚提示は,能動感の生成にのみ効果があることが推測された.

- 6B-08
- 直進型トレッドミルによるLocomotion-Interfaceの評価
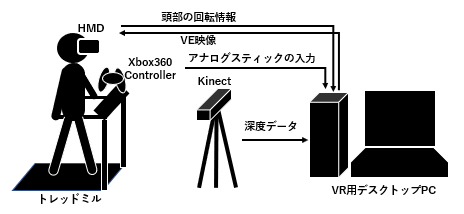
〇阪下 凌大(工学院大学)、田中 久弥(工学院大学) - 本研究では直進歩行型トレッドミルと、身体回転特徴を用いたLocomotion -Interface(LI)を開発し、その評価を行った。先行研究ではトレッドミル歩行における肩のYaw回転量を、仮想環境の左右歩行の制御に用いた。このシステムの使用後は、酔いの指標であるSimulator Sickness Questioner(SSQ)スコアで平均6/48を示し、酔いにくいことが示された。本研究では本LIシステムの酔いにくさや、臨場感の評価をゲームコントローラによるLIシステムや、操作条件と比較することで評価した。
- 6B-09
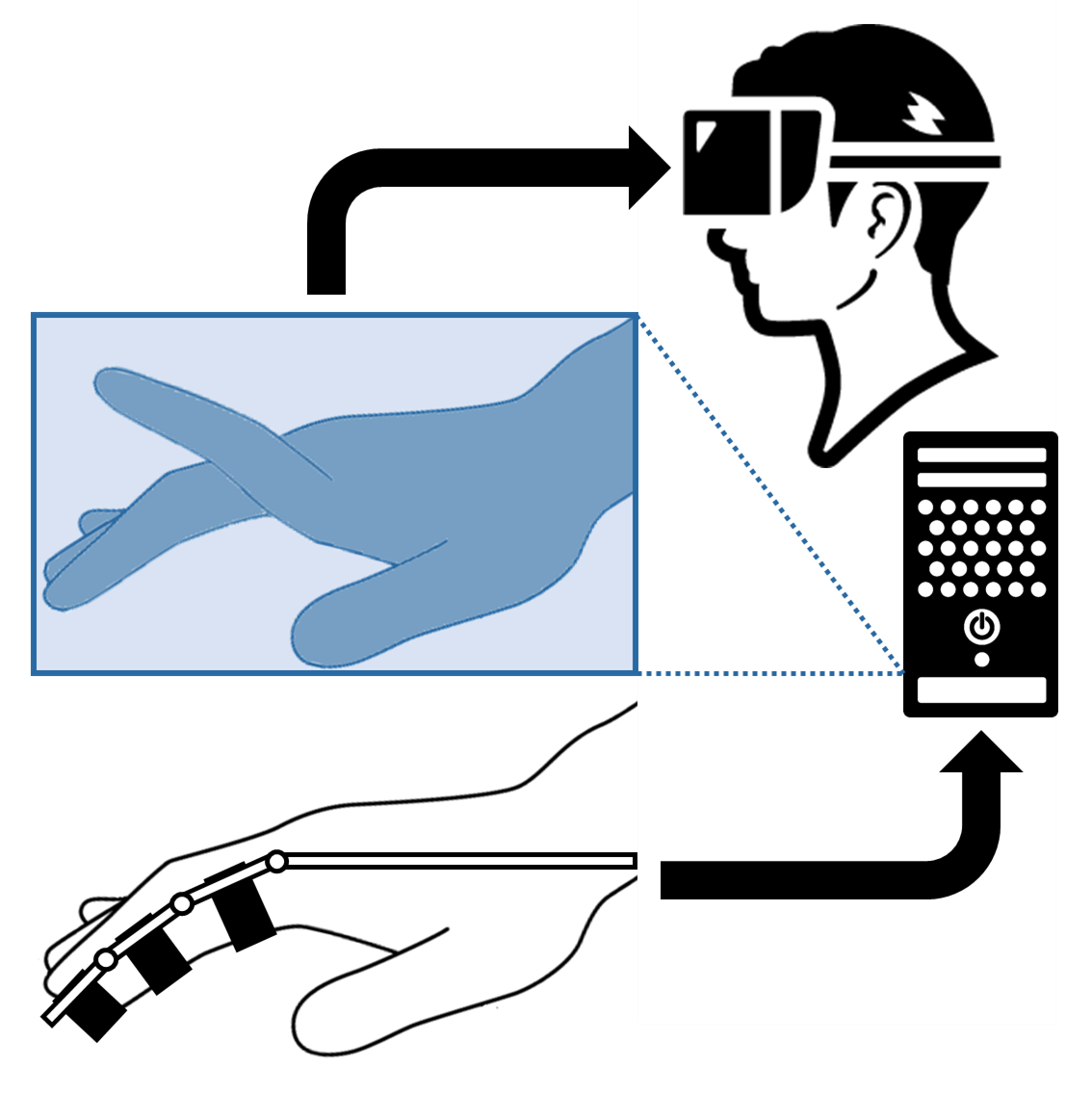
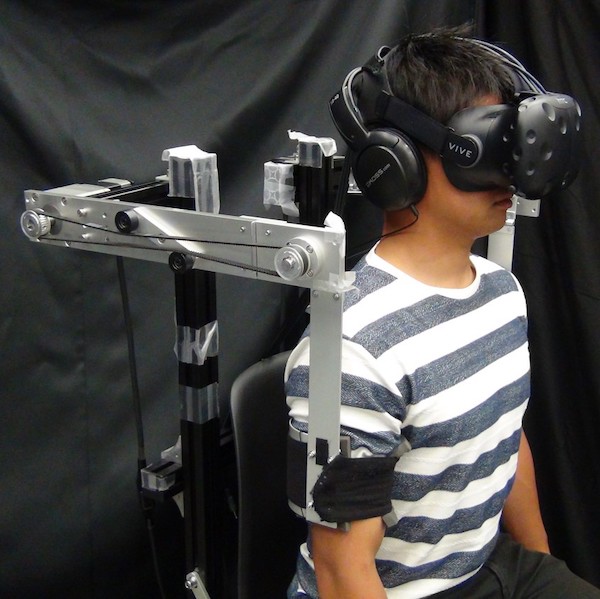
- Motion-Less VR: リアル身体の運動を必要としない全身没入型VRインタフェース
〇望月 典樹(法政大学)、中村 壮亮(法政大学) - モーションキャプチャを用いたVRシステムでは、バーチャル身体の運動がリアル身体で実行可能なものに限定される。例えば狭いリアル空間では広いバーチャル空間を移動することはできず、リアル身体が立位に制限されるとバーチャル身体を座位にすることができない。そこで本研究では、身体固定状態での運動意図取得と運動感覚提示で実現する、リアル空間での身体運動を必要としない全身没入型VRインタフェースを提案する。