Sept. 12 2019
Room A Haptics - Dexturos Manipulation & Transferance
Chair:Satoshi Saga(Kumamoto Univ.)
- Examination of Sensory Presentation Method in Suction Tactile Presentation to the Face
〇TAKAYUKI KAMEOKA(The University of Electro-Communications)、YUKI KON(The University of Electro-Communications)、Hiroyuki KAJIMOTO(The University of Electro-Communications) - 現在安価なHMDの普及により質の高いVR体験への需要が高まっている.本提案ではHMDに触覚提示機構を内蔵することで着脱の手間なく触覚提示を行い,簡便に高品質なVR体験を提供する.本発表では触覚提示手法として吸引刺激を提案し,顔面への吸引触覚提示手法について検討した結果を発表する.

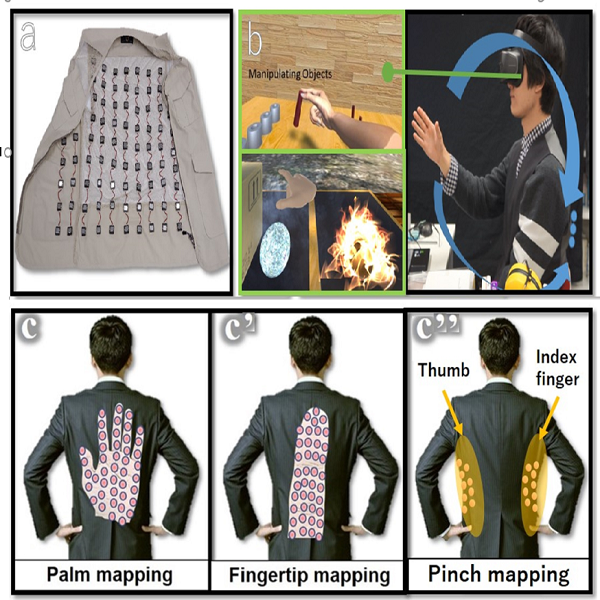
- The Development of High-Density Tactile Vest that Realizes Tactile Transfer of Fingers
〇TAHA MORIYAMA(The University of Electro-Communications)、AKIFUMI TAKAHASHI(The University of Electro-Communications)、Hiroyuki KAJIMOTO(The University of Electro-Communications) - VR空間内にある物体に対する触覚提示デバイスは,指に直接装着する物が多く存在するが,指の動きを妨げてしまう問題点がある.またこうしたデバイスを用いる場合,触知覚能力は人間の指先が本来持つ能力の上限を超える事はない.そこで,本研究では指に本来知覚するはずの触覚を,振動子を用いて背中に提示(触覚転移)するデバイスを提案する.本稿ではベスト型のデバイスを試作し,5本の指先に加わる力の面積情報を,独立して駆動する144個の振動子を用いて背中に提示した.
- 6A-03
- Preliminary Experiment of Haptic Feedback Position in Interaction with Device Based Augmented UI using AR
〇Masato Kobayashi(Mercari, Inc.)、Ikkou Morohoshi(Mercari, Inc.) - 近年,デバイスの表示領域をAR技術を用いて拡張する研究が行われている.一方で,ARオブジェクトに対して触覚提示を行う研究も盛んに行われている.しかし,デバイスが基準となるARシステムにおいては,外部に触覚提示装置を用意せずともデバイス側で触覚提示を行うだけで十分な体験が可能であると考えた.本稿では,ARによるスマートフォンの表示領域拡張における触覚提示部位の検討に関する予備的実験の結果について報告する.

- 6A-04
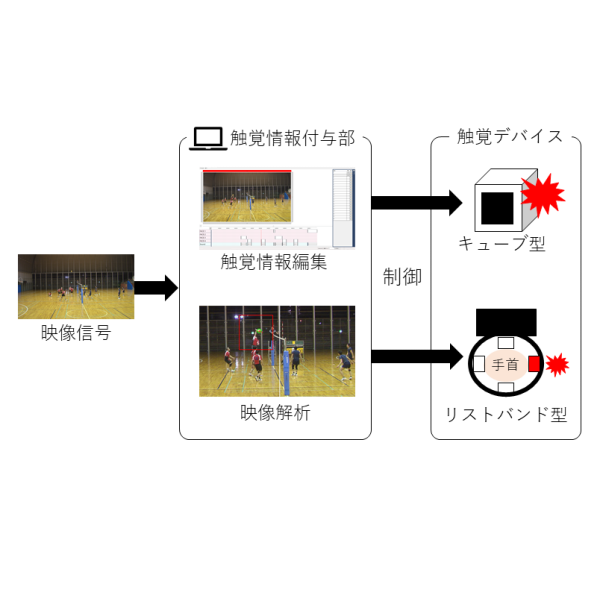
- Tactile information presentation system having tactile information editing function for visual contents
〇Makiko Azuma(Japan Broadcasting Corporation Science&Technology Research Laboratories)、Takuya Handa(Japan Broadcasting Corporation Science&Technology Research Laboratories)、TOSHIHIRO SHIMIZU(Japan Broadcasting Corporation Science&Technology Research Laboratories)、Masaki Takahashi(Japan Broadcasting Corporation Science&Technology Research Laboratories) - 映像コンテンツの特徴的な動きを、触覚を介して直感的に伝えるため、触覚情報提示デバイスの研究開発を進めている。これまでに、キューブ型やリストバンド型の触覚デバイスを開発してきた。今回,これらのデバイスに提示する触覚情報を映像から自動で決定したり,手動で編集したりできる「編集機能付き触覚情報提示システム」を開発したので報告する。
- 6A-05
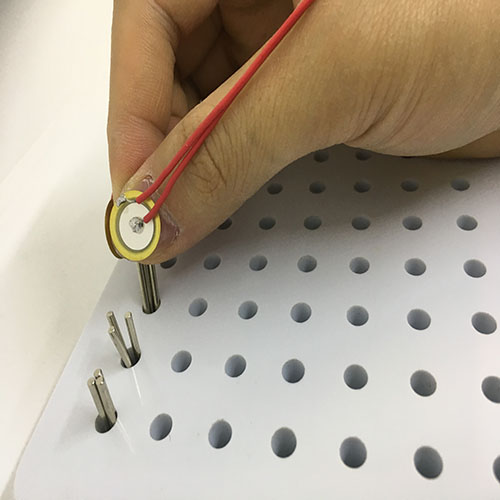
- Basic study on improving finger dexterity via vibration applied to fingernails
〇Xuqing Tang(University of Tsukuba)、Ai Hamasaki(University of Tsukuba)、YUKI HASHIMOTO(University of Tsukuba) - 指の巧緻性は繊細な手作業の完成精度を左右するとされている。指の巧緻性を向上させる事ができれば繊細な手作業における精度の向上などに活用できると考えられる。本稿は,指の爪上からの微弱振動を用いた実用性、汎用性のある指巧緻性向上手法を提案する。粗さ弁別実験を行い、本手法によって触覚感度が向上することを確認した。またo’Connor Finger Dexterity Testを用いて実験を行い、本手法を用いて指の巧緻性が改善された傾向がみられた。
- 6A-06
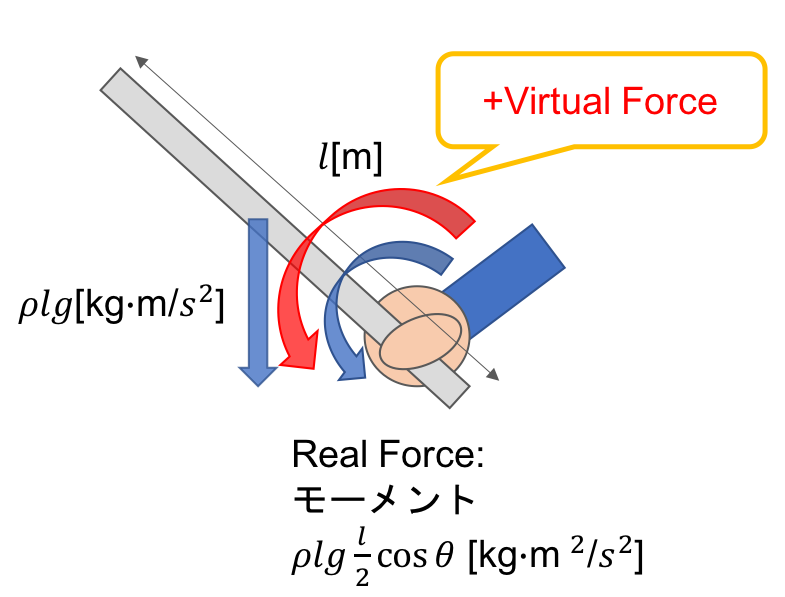
- Superimposed Presentation of Force Sense on the Wrist in Interaction with a Real Object
〇Masataka Narumiya(Department of Mathematical Engineering and Information Physics, School of Engineering, The University of Tokyo)、Arata Horie(The Department of Advanced Interdisciplinary Studies, Graduate School of Engineering, the University of Tokyo)、Masahiko Inami(The Research Center for Advanced Science and Technology) - 近年のARシステムは視覚的なものが代表的であり、他のモーダルにおける拡張現実は十分に議論されていない。ここで、「力触覚のAR」とは何かを考えると、現実の力触覚情報とvirtualの力触覚情報の重ね合わせでもありえる。すなわち、AR力触覚デバイスというのは人と実物体とのインタラクションを妨げずに力触覚を提示するものである。本論文では、2つの実験によって、実物体とのインタラクションに基づいたARシステムにおいて、手首に装着する力覚フィードバックデバイスを用いて提示されたvirtualな力覚が、人が知覚する力覚へ、どの程度の影響があるかを評価した。
- 6A-07
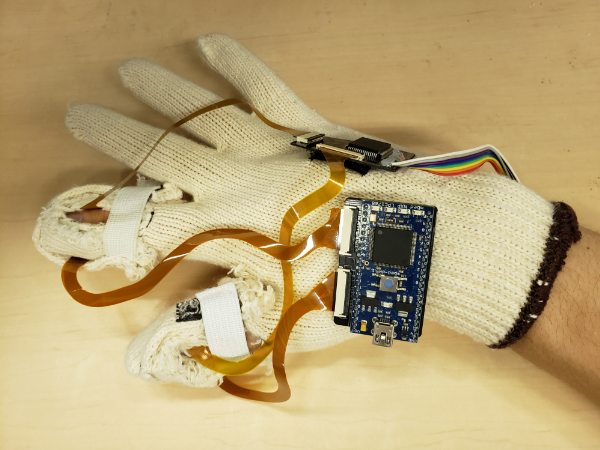
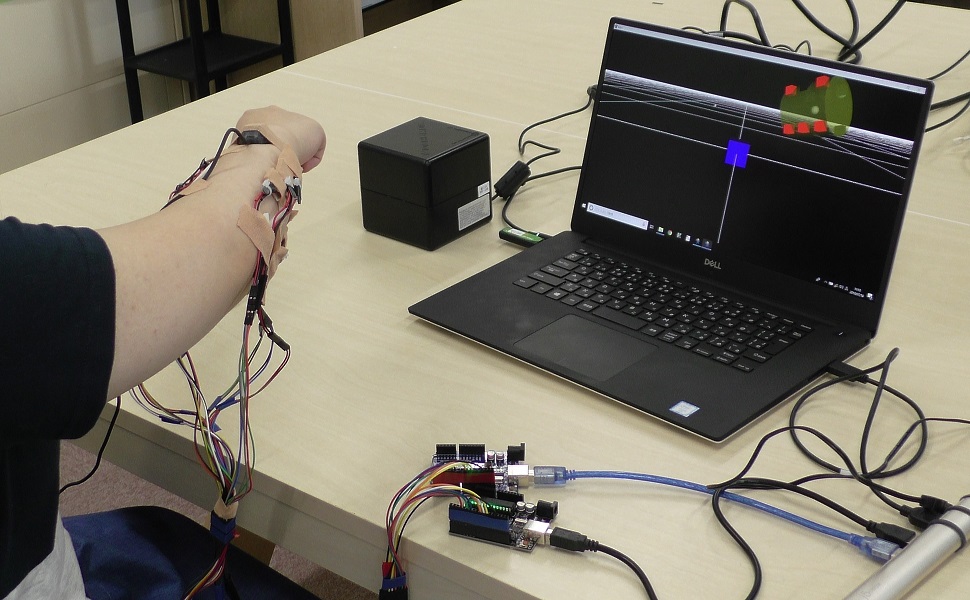
- evaluation of the perception with gap width in glove-style electronic touch-thorough system
〇Hidenori Ito(Meijo University)、HIDEKI KAWAI(Meijo University)、Hiroyuki KAJIMOTO(The Univesity of Electro-Communication)、YASUYUKI YANAGIDA(Meijo University) - 被覆物着用時における触覚情報の欠損を補償するため,手袋表面の触覚情報を手袋内部へと伝達する手袋型電子的触覚透過システムが開発されている.このシステムの評価として物体把持時における角度弁別閾の調査が行われているが,他の評価は行われていない.本研究では触覚情報を遮るため,軍手の布地4枚にシステムを導入し,なぞり動作時における指先のギャップ幅知覚の評価を行った.
- 6A-08
- Evaluation of Spatial Information Providing Method using Visual and Vibration Stimulation
〇MISA TANAKA(Muroran Institute of Technology)、TAKESHI SHIBATA(Muroran Institute of Technology) - 人の腕をある位置に向かって誘導するとき,視覚と振動の刺激を組み合わせて位置情報を提示することによって,効果的に誘導できると考えられる.本研究では視覚刺激と振動刺激を組み合わせて位置情報を提示するシステムを実装した.実験では実装したシステムを用いて提示された位置に向かってユーザが腕を動かし,奥行き方向の動きを評価した.実験の結果,提案手法の方が視覚刺激のみによる提示よりも提示効果があった.
- 6A-09
- Rendering various shapes of virtual objects using torque feedback
〇Takeru Hashimoto(The University of Tokyo)、SHIGEO YOSHIDA(The University of Tokyo)、TAKUJI NARUMI(The University of Tokyo)、Michitaka HIROSE(The University of Tokyo) - 人は把持している物体を振ることで,力覚を通じてその形状を知覚可能である.バーチャル環境においては,把持物体から視覚的・力覚的に知覚される形状の整合性を取ることは体験のリアリティ向上やアフォーダンスの点において重要な課題である.本研究では形状知覚に影響を与える要素としてトルクに注目し,人間の手の運動に対してトルクをフィードバックすることで力覚を通じて知覚されるバーチャル把持物体の形状を自在に操作する手法を提案する.
