Sept. 12 2019
Room C Behavior measurement & Computer vision
Chair:Shingo Kagami(Tohoku Univ.)
5C-01-
-
Announcement video
-
- [Cancel]
Prediction of fingering of guitar players based on machine learning using skeletal motions
〇Watanabe Kazumasa(Kyoto Institute of Technology)、TAO MORISAKI(The University of Tokyo Graduate School of Frontier Sciences)
- 5C-02
- Development of Measurement System for Archiving Folk Performing Arts and Environment
〇YUSUKE SHIMIZU(Muroran Institute of Technology)、TAKESHI SHIBATA(Muroran Institute of Technology) - 民俗芸能の演技を記録・保存するためには,演者の動きと周囲の環境を同時に記録する必要がある. 全方位カメラと三次元計測機器(MoCap)を用いて,同時計測できるようにする.全方位カメラにMoCapのセンサを固定する治具を開発し,センサの位置を校正することによって,全方位画像に映るセンサの位置にセンサの位置を表すCGを重畳表示できた.
- 5C-03
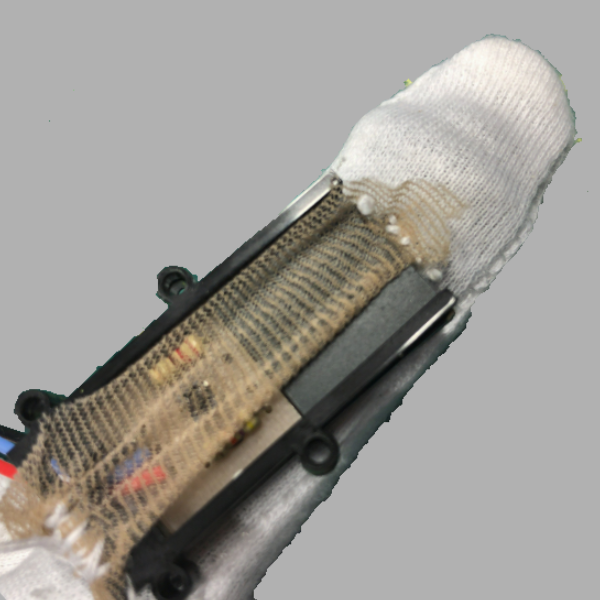
- Proposing a Hand-Tracking Device using a Tangential Force Mechanical Sensor
〇Yuto Kurashige(Future University Hakodate)、Michael Vallance(Future University Hakodate) - Conventional hand-tracking devices are constructed with inertial measurement units, bending sensors, and optical technologies. However, these are limited by their high-cost and environmental factors. In this research, a hand-tracking device using a tangential force mechanical sensor is proposed.
- 5C-04
- Mobile Motion Capture Method for Walking Person
〇Yusuke Yuasa(Tokyo Metropolitan University)、Hideki Tamura(Tokyo Metropolitan University)、Vibol Yem(Tokyo Metropolitan University)、Tomohiro Amemiya(The University of Tokyo)、Michiteru Kitazaki(Toyohashi University of Technology)、Yasushi Ikei(Tokyo Metropolitan University) - 本研究の目的は、VR空間における歩行運動の追体験の実現である。計測系をSegwayへ搭載し、歩行者に追従して歩行運動を計測する手法を開発する。これにより、従来の身体運動計測手法が抱える計測空間の制限や、計測誤差の蓄積の問題を解決することができると考えられる。計測した歩行運動をVR空間上でアバタに投影し、HMDを通して体験者へ提示することで歩行運動の追体験を可能にする。

- 5C-05
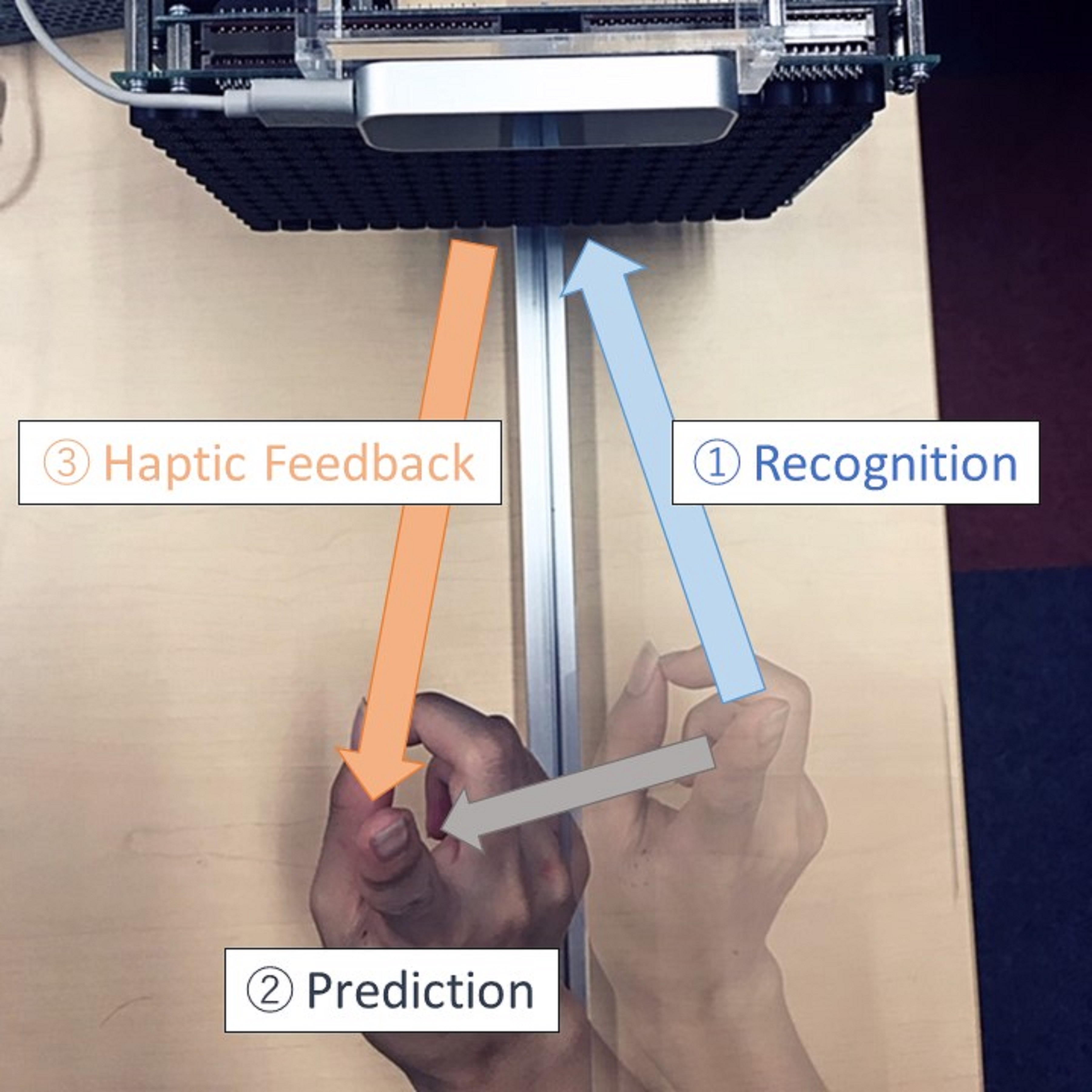
- Reduction of delay in midair haptic interaction by hand position prediction
〇TATSUYA TAKEI(Tokyo University)、SHUN SUZUKI(Tokyo University)、MASAHIRO FUJIWARA(Tokyo University)、YASUTOSHI MAKINO(Tokyo University)、HIROYUKI SHINODA(Tokyo University) - VRにおける触覚提示の方法として, 超音波を用いた空中触覚は一つの有望な選択肢である. しかし,モーションキャプチャーで触覚の提示対象である手指の位置を取得した後に触覚の提示処理を行うため,触覚フィードバックを与える際に遅延が生じる. この遅延により, 実際の手の位置と触覚を提示した位置との間に誤差が生まれてしまう.そこで本研究では遅延時間後の手指の位置予測を行い,予測した座標に触覚フィードバックを与えることで誤差を低減する.
- 5C-06
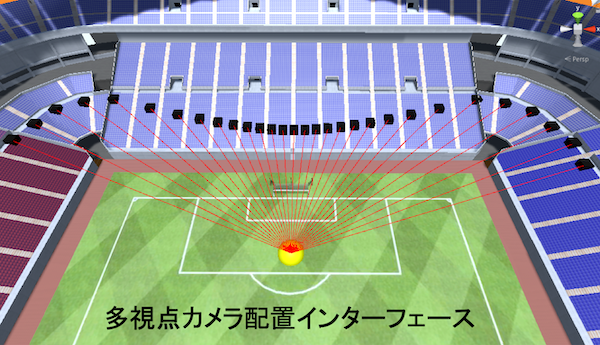
- VR interface for layout design of multi-view cameras
〇Naoto Matsubara(University of Tsukuba)、Hidehiko Shishido(University of Tsukuba)、Yoshinari Kameda(University of Tsukuba)、Itaru Kitahara(University of Tsukuba) - スポーツをするような広い場所で多視点映像撮影を行うには、カメラ配置の決定に大変な労力がかかる。そこで、本研究ではVR空間上で入力された撮影領域に応じて最適なカメラ配置を提示するインターフェースを作成する。VR空間上にスタジアムなどの撮影対象となる3Dモデルを配置する。3Dモデル上で撮影したい領域を入力すると最適な場所に仮想カメラを配置する。また、配置した各カメラから見える視界もあわせて提示する。
- 5C-07
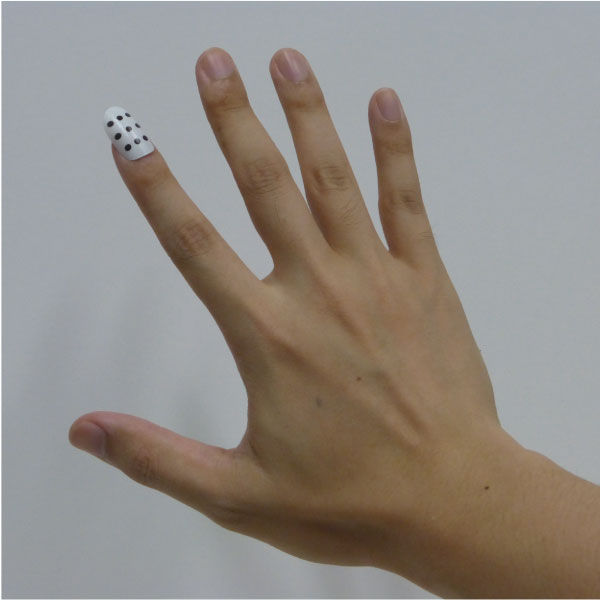
- Prototype of Nail Markers for High-speed Fingertip Pose Estimation
〇Tomohiro SUEISHI(The University of Tokyo)、Masatoshi ISHIKAWA(The University of Tokyo) - ダイナミックプロジェクションマッピングや滑らかな人間機械協調動作に向けて高速な手指姿勢認識が必要だが,主に低遅延性に大きな課題があった.本研究では特に指先の高速姿勢推定に着目し,装着時の拘束性の低いネイルマーカーを提案する.高速光軸制御による高解像度撮影を想定し,爪という微小剛体曲面上の点群を利用して指先姿勢推定を行う.本稿では試作したネイルマーカーの非平面性による姿勢推定精度の向上を確認した.
- 5C-08
- Robust Edge-based Iterative Posture Estimation for Dynamic Projection Mapping
〇YUKI MORIKUBO(The University of Electro Communications)、NAOKI HASHIMOTO(The University of Electro Communications) - 本研究では,ユーザが投影対象を自由に把持し動かすことのできるプロジェクションマッピングの実現を目指す.これには高速かつ遮蔽に頑健な3次元位置姿勢推定が必要であるが,汎用的な機材により実現でき高速性に優れる輪郭を利用した研究において,手による遮蔽の影響が大きく十分に頑健でなかった.そこで,遮蔽の影響を減らしつつ反復計算を行い推定精度を高めることで,投影対象の多様な持ち方を許容する推定手法を提案する.

- 5C-09
- The Development of a Method for the Real-Time Detection of Specific Objects in Museum Exhibits
〇Masaaki Matsunaga(University of the Ryukyus) - 博物館における複数の展示された展示品を対象に、AR(Augmented Reality)による情報提示を行う場合、対象物体の位置及びインスタンス情報をユーザーのスマートフォンなどにおける画面上よりリアルタイムで取得する必要がある。深層学習を利用した物体検出技術が多数提案されており、高速かつ精度の高い物体検出が可能なことが分かっている。しかし、博物館の展示物を対象にする場合、識別対象となるクラス数が膨大となる上、学習データを全てユーザーが用意する必要がある為、認識精度の確保、学習コストの問題が発生する。本研究ではこのようなアプリケーションにおいて、実用性の高い物体検出手法の開発を行う。

- 5C-10
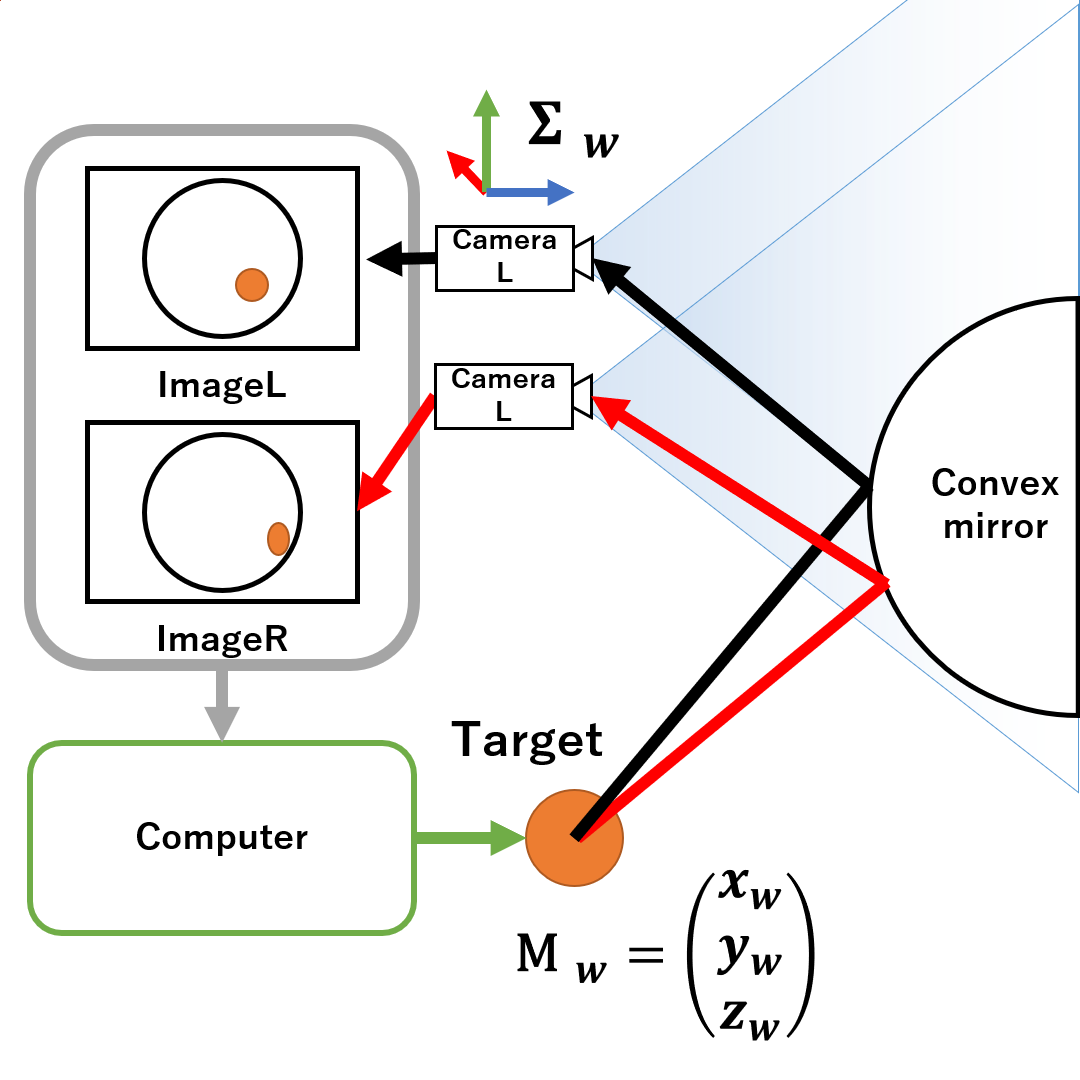
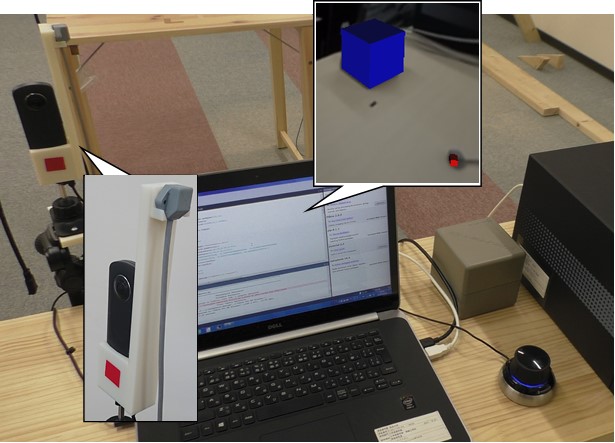
- Three-dimensional position estimation of an object present in a blind spot using a mirror image
〇Tomoki Taniguchi(Osaka Institute of Technology)、FUMITAKA NAKAIZUMI(Osaka Institute of Technology) - 本研究では,凸面鏡に映りこんだ鏡像を利用し,死角に存在する物体の位置推定を行うシステムの開発を目的としている.手法としては,多視点画像の鏡像領域を認識し,当該領域についてステレオ視処理及び座標変換処理をかけることにより,直接視認不可能な領域の三次元位置推定を行う.本稿では,凸面鏡,ステレオカメラ,および被写体を固定した限定的な条件において,死角に存在する物体の三次元位置推定を行った.