Wednesday, 11 September
9月11日(水)
D会場 アニマシー/エージェント
座長:白井暁彦(グリー)
- 4D-01
- THE WALKING NEKKO
〇渡辺 凌大(関西学院大学)、浅沼 侑真(関西学院大学)、武田 大成(関西学院大学)、藤田 聡太(関西学院大学) - 世の中には賃貸マンションやアレルギーなど,さまざまな理由で猫を飼えない人々がいる.本企画では,普段猫と触れ合えない人々に猫が体の上を歩いている感覚を味わってほしいと考え,猫が体の上を歩いてくれる体験ができるインタラクティブデバイス「THE WALKING NEKKO」を作成する.ユーザがヘッドマウントディスプレイを装着し仰向けで寝ると,猫が体の上を歩いたり体の上で寝転んだりする感覚を,視覚と触覚を通しユーザに提供する.

- 4D-02
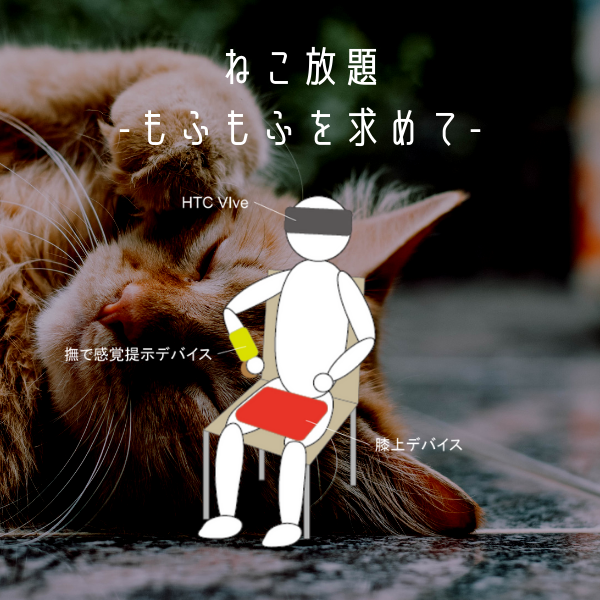
- ねこ放題~もふもふを求めて~
〇後藤 慶多(慶應義塾大学)、飯森 優斗(慶應義塾大学)、奥谷 哲郎(慶應義塾大学) - あなたはふとした時に「猫に触れて癒されたい」と思ったことはないだろうか。本企画では、膝の上に猫がいるように感じる触覚デバイスを提案する。オフィスや教室など、実生活における様々な場所で膝上のねこと触れ合い癒される体験を提供する。
- 4D-03
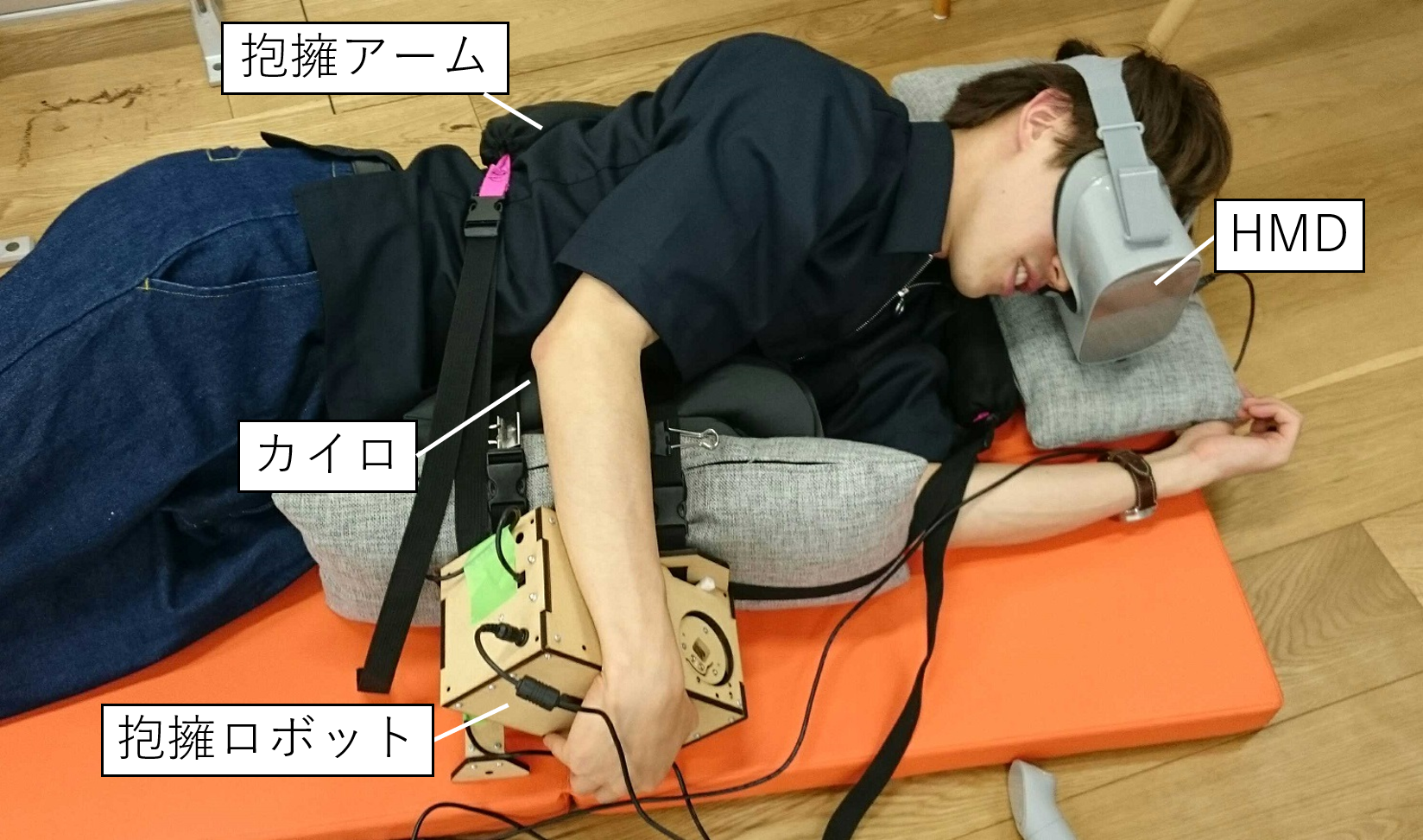
- 生物感を伴うバーチャルハグシステムとコンテンツ管理システムの構築
〇下林 秀輝(東京大学大学院 情報理工学系研究科)、柴田 佳祐(京都大学大学院 情報学研究科)、登石 拓磨(京都大学大学院 情報学研究科) - 親しい人同士の抱擁にはストレス軽減効果があることが広く知られており,ロボットと抱擁を行うシステムの研究が行われている.本研究では,参加者にバーチャルアバターが抱擁する映像を見せ,抱擁ロボットを用いて実際に抱擁されたかのような体験を実現する.ロボットとHMDを用いたバーチャルハグシステムを提案し,ロボットには呼吸などの生物感を伴う機能を搭載した.また,容易にバーチャルハグ体験を編集可能なコンテンツ管理システムを構築した.
- 4D-04
- VRテレカウンセリングに基づくセラピスト-クライエント間インタラクションに関する評価
中川 聡(東京大学)、三枝 弘幸(東京大学)、遠藤 凌河(東京大学)、〇成瀬 加菜(東京大学)、Lem Wey Guan(東京大学)、國吉 康夫(東京大学) - カウンセリングにおける心理的障壁を解消するための遠隔面接手法の検討を目的として,VR,対面,チャット,電話,テレビ電話の5つの形式で心理面接を行った.被験者であるセラピストとクライエントの両者に対して,各面接の終了後および全ての面接後に評価を求めた.VR形式については,肯定感尺度において他の遠隔手法と有意な差がみられなかったことから,テレカウンセリングにおけるVRの有効性と新たな支援の可能性が示された.

- 4D-05
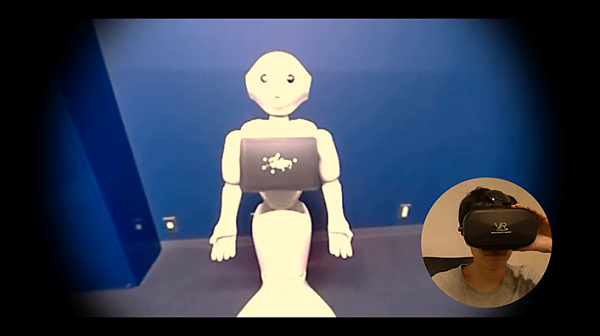
- ヒューマンロボットインタラクションにおけるロボット動作のVR映像によるユーザの印象評価の有効性
〇伊豆井 尊宗(東京農工大学)、Venture Gentiane(東京農工大学) - 本研究では,ロボットの印象評価実験のコストを削減することを目指し、実環境実験や他の動画実験と比較し、ロボット動作のVR映像がユーザにどのような印象を与えるかを評価することを目的とする。360度カメラを用いて2種類のヒューマノイドロボットの動作を撮影し、CH-33を用いて25人から定量的な印象評価を取得した。先行研究での結果と比較し、VR動画が与える印象はロボットの種類によって異なる性質を持つことが分かった。
- 4D-06
- 自分の分身として仮想空間内を案内・紹介するキャラクターエージェントの開発手法の提案
〇松田 康生(大阪工業大学)、矢野 浩二朗(大阪工業大学) - 近年、ネット上の仮想空間内にクリエイターが自ら作品を展示する試みが盛んである。ネット上の仮想空間は多くの人に見てもらえる利点はあるが、展示者自身が来場者に24時間直接、作品等の説明を紹介することは難しい。そこで本研究では、安価な市販のVRデバイスを用いたモーションキャプチャーにより、自分の分身として仮想空間内で作品を案内・紹介できるキャラクタエージェントを簡単に作成できる手法を提案する。
- 4D-07
- VGentEditor: 操作部位と空間目標点を動作表現として用いたインタラクティブキャラクタの動作生成
〇佐藤 裕仁(東京工業大学)、三武 裕玄(東京工業大学)、杉森 健(東京工業大学)、長谷川 晶一(東京工業大学) - キャラクタのインタラクティブな振る舞いには、シーン内のオブジェクトやセンサで取得した人間の位置などに合わせて動作が変化する必要がある。本研究では、動作での操作部位と空間内の目標空間の組を記述することで、動的なアニメーションを生成する手法を提案する。また、提案手法の編集GUIを構築し、編集した動作例を紹介する。多様な振る舞いを編集でき、インタラクティブキャラクタの構築を大きく手助けできることを目指す。

- 4D-08
- 自律エージェントとインタラクションができるVRプラットフォームの作製
〇小栗 賢章(東京工業大学)、三武 裕玄(東京工業大学)、杉森 健(東京工業大学)、長谷川 晶一(東京工業大学) - VR空間でコミュニケーションをとるソーシャルVRサービスが普及しているが,ソーシャルVRにおける自律キャラクタは身体動作を伴うキャラクタ性が必要なため,未だ十分とはいえない.本研究室では身体動作を自動生成する自律エージェントの研究は進められているため,自律エージェントと人々がインタラクションできるようなプラットフォームがあればソーシャルVR空間での自律キャラクタを実現することができる.本研究では,以上の要件を満たすVRプラットフォームを作製した.