Tuesday, 14 September
9月14日
一般発表 13:00-14:20 モデル・計算
座長:加藤 史洋(早稲田大学)
- 3E2-1
-
- 顔面での皮膚吸引触覚刺激における有限要素解析
〇亀岡 嵩幸(電気通信大学、日本学術振興会)、梶本 裕之(電気通信大学) - 頭部搭載型ディスプレイ(HMD)の普及とともにHMDに触覚提示装置を内蔵し,顔面へ感覚提示を行う研究が多く存在する.部位としてこれまでVR環境における指先触覚情報を顔に提示するという異部位触覚提示技術の開発に取り組んできた.そこで種々の理由により吸引触覚を利用していたが,吸引部形状および吸引気圧により異なる触覚強度,触覚の質が感じられた.本稿ではFEMシミュレーション用いることで顔面における皮膚吸引触覚刺激提示を行うために皮膚内部に発生するひずみエネルギーを観察した結果を報告する.
- 3E2-2
-
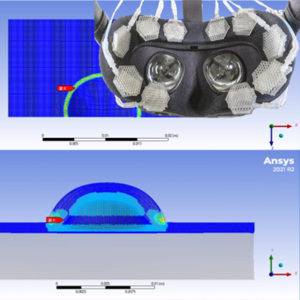
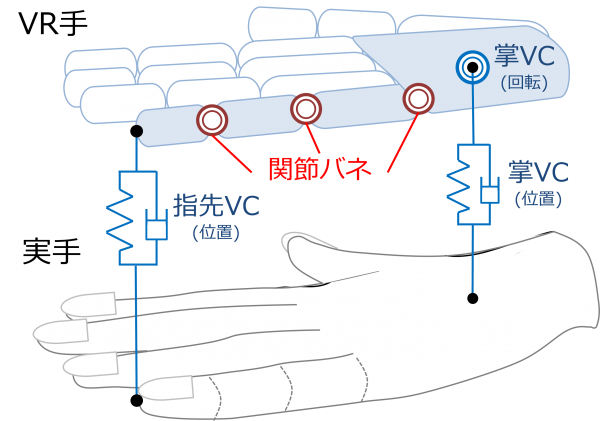
- 連成振動の抑制によるリンク構造を持つ5指VRハンドの操作性の改善
〇松木 倫太郎(東京農工大学大学院工学府)、高橋 拓夢(東京農工大学大学院工学府)、藤田 欣也(東京農工大学大学院工学府) - 現実の手と同様に直感的で追従性の高い指を使ったVR物体操作を目標に、我々は、リンク構造を有し、指先のみをVCで実手に追従させ、各VR指関節にバネを設置してIK法で関節角を決定する5指VRハンドを開発してきた。しかし、リンク構造に起因する連成振動の抑制が課題であった.本研究では、関節角速度に比較して指節の並進速度が安定であることに着目し、各指節の末節部に並進ダンパを設置した結果、指先への追従性を維持しつつ安定性を改善することができたので報告する。
- 3E2-3
-
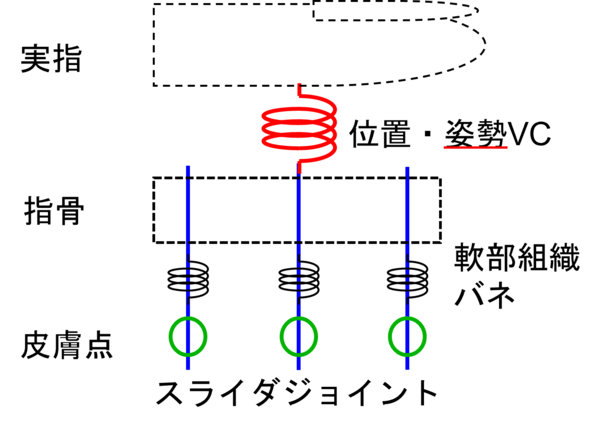
- 二指での高い物体把持剛性を実現する柔軟なVR指先モデル
〇高橋 拓夢(東京農工大学大学院工学府情報工学専攻)、松木 倫太郎(東京農工大学大学院工学府情報工学専攻)、藤田 欣也(東京農工大学大学院工学研究院先端情報科学部門) - 剛体物理シミュレータ上での手を用いた物体操作において,把持物体と安定に接触するために,我々は複数の皮膚点をバネによって接続した指先で構成されるVR手モデルを開発してきた.しかし,指腹面でのねじれ剛性が低く,VR指先が把持物体とともに回転することが課題であった.本研究では,皮膚点の指腹に対する接線方向運動を拘束することで,ねじれ回転を抑制した.これにより物体端部を二指把持しての姿勢維持が可能になった.
- 3E2-4
-
- 発表辞退
- 3E2-5
-
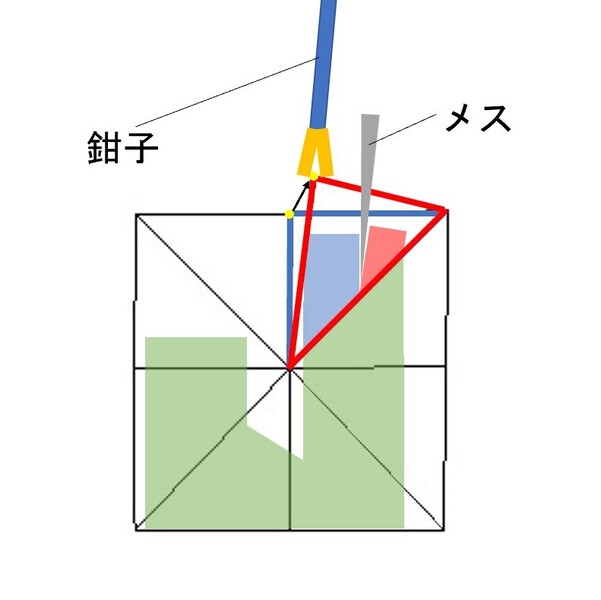
- 埋め込み変形モデルの実時間多重化処理による効率的な切断表現の提案
〇藤北 隆史(愛知工科大学 工学部 情報メディア学科)、田川 和義(愛知工科大学 工学部 情報メディア学科、立命館大学 総合科学技術研究機構) - 埋め込み変形モデルは粗いメッシュに細かなメッシュの特性を埋め込んで計算することで,効率化を図る手法である.しかし,枝分かれした物体を粗いメッシュで纏めると,複数の枝が纏まって運動してしまう.このため,多重化表現により回避する方法が提案されているが,枝分かれの情報は事前に与えられており,任意の切断操作には対応していなかった.そこで本研究では,切断の状況に応じて実時間多重化処理を行うことで任意の切断操作に対応する方法を提案し,試験的実装を行う.
- 3E2-6
-
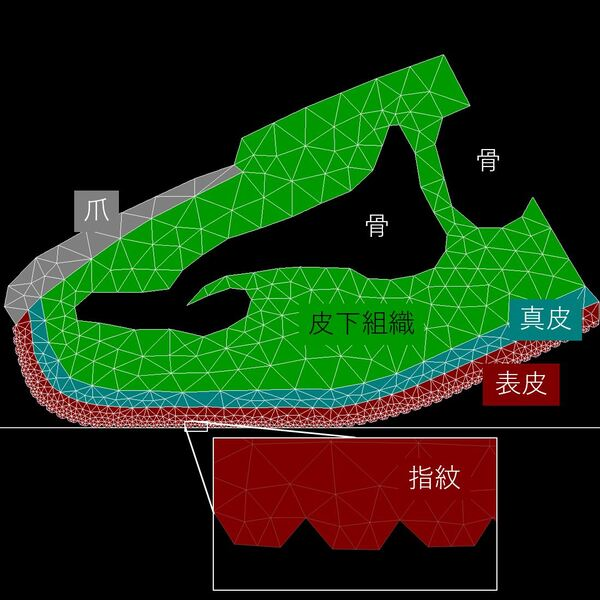
- MR画像に基づくヒト指先のモデリングと評価
〇木田 昌希(愛知工科大学 工学部 情報メディア学科)、田川 和義(愛知工科大学 工学部 情報メディア学科、立命館大学 総合科学技術研究機構) - ヒトが物体に触れる際,指の変形が起こるが,その指の物理パラメータの妥当性は示されていない.そこで,本研究では触覚情報生成に必要十分な仮想柔軟指モデルを構築することを目的とする.このため,MR画像に基づいて,骨と爪,皮膚から構成される指モデルを構築し,実際の指の変形と比較することにより物理パラメータの妥当性の検討を行ったので報告する.
- 3E2-7
-
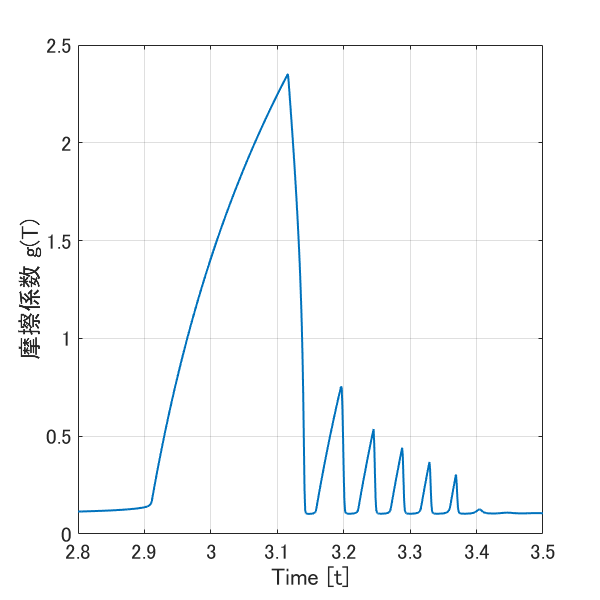
- 様々な摩擦現象を再現する力触覚レンダリングのための摩擦モデルの提案
〇中原 線(東京工業大学工学院情報通信系情報通信コース長谷川晶一研究室)、長谷川 晶一(東京工業大学工学院情報通信系情報通信コース長谷川晶一研究室) - 従来の力触覚レンダリング手法で提示される摩擦は、静止摩擦と動摩擦からなるCoulomb摩擦であった。しかし、現実にはそれ以外にも様々な摩擦現象が存在し、これらを再現することができればVRシステムにおける触覚提示の向上が期待できる。本研究では、Stribeck効果や部分滑りなどの摩擦現象を再現するLuGreモデルを拡張して、時変静止摩擦をも再現できる力触覚レンダリングのための摩擦モデルを提案する。