Monday, 13 September
9月13日
一般発表 16:00-17:20 触力覚(機構・計測)
座長:吉元 俊輔(東京大学)
- 2E3-1
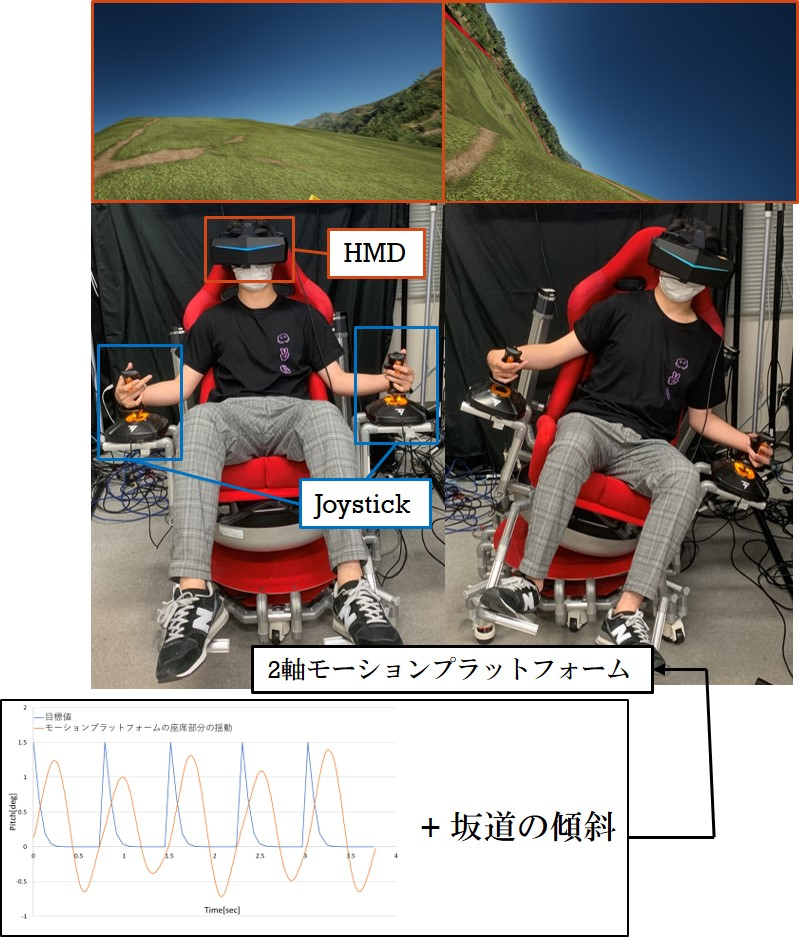
- 2軸モーションプラットフォームによる2足歩行ロボットの搭乗感呈示法の改良
〇森 恭介(広島市立大学大学院情報科学研究科)、脇田 航(広島市立大学大学院情報科学研究科) - 我々は,2足歩行ロボットに搭乗する際の衝撃,振動,急斜面などの6自由度の運動を2軸モーションプラットフォームの回転運動に近似させることで,高臨場かつ低コストな2足歩行ロボットの搭乗感呈示を目指している.本研究では,2軸モーションプラットフォームを用いて2足歩行ロボットの歩行中に生じる上下運動の振動および足が地面に着地したときに生じる撃力による高周波振動を付加した振動の改良を試みる.
- 2E3-2
-
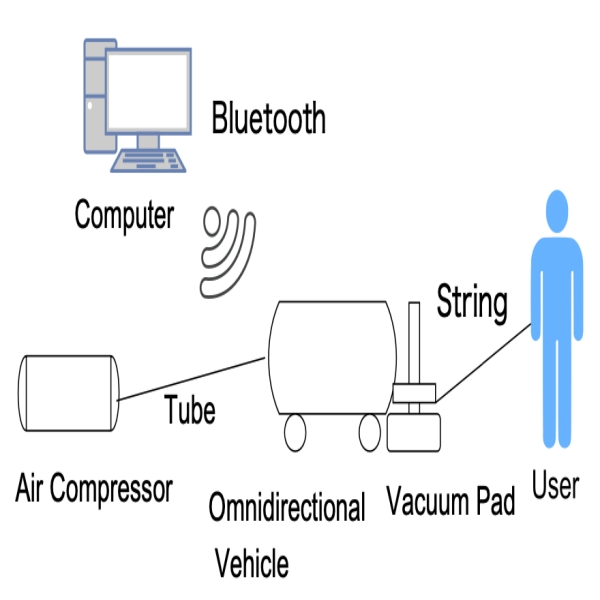
- 真空ブレーキの動的制御における制御周波数の違いによる知覚変化の検証
〇際田 直樹(熊本大学大学院 自然科学教育部)、嵯峨 智(熊本大学大学院 先端科学研究部) - 我々はこれまで全方向移動車と真空を利用したブレーキを組み合わせたデバイスによる力覚提示手法を提案してきた.以前の実験により電磁弁をPWM制御することで力覚表現の多様化が可能であることが示唆される一方で,周波数によっては提示される力覚が振動のように感じてしまうという課題が判明した.今回はPWM制御周波数を変化させ,ユーザが振動を感じにくくなる周波数を同定することを目的とし,制御周波数の変化に伴うユーザの知覚変化を評価した実験について報告する.
- 2E3-3
-
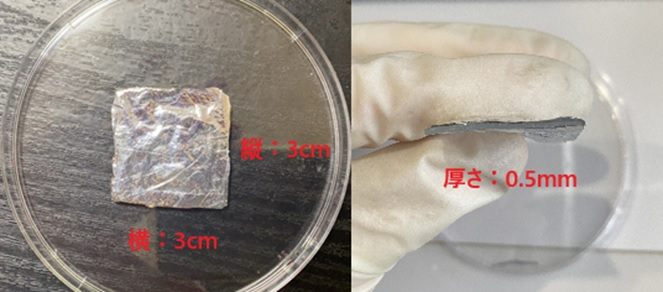
- 柔軟型圧電デバイスの検討
〇曽根 順治(東京工芸大学 工学部)、飯田 麗司(東京工芸大学 工学部)、佐藤 龍弥(東京工芸大学 工学部)、栁川 信明(東京工芸大学 工学部) - プリチャージ型の柔軟圧電デバイスを検討している。その内容を説明する。
- 2E3-4
-
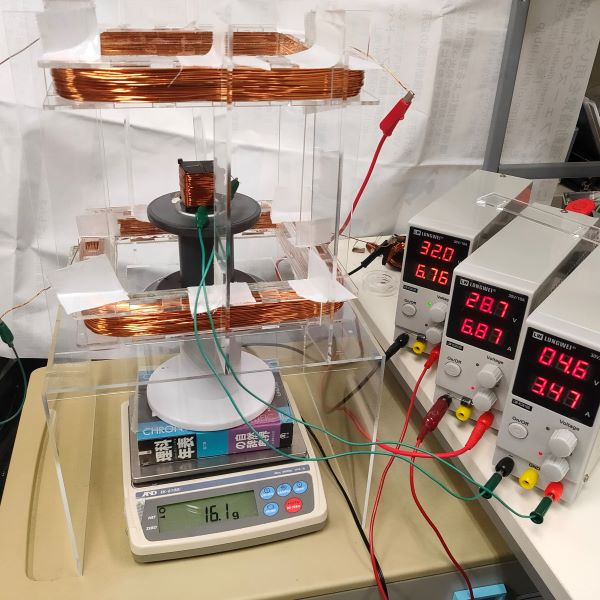
- 磁力による高品位な遠隔力覚提示に関する基礎検討
〇田中 叡(電気通信大学 情報理工学研究科、日本学術振興会特別研究員)、梶本 裕之(電気通信大学 情報理工学研究科) - 力覚提示装置の多くは、ロボットアームなどを用いて指などを駆動する接地型と、力錯覚や筋電気刺激などを利用した非接地型に大別される。しかし前者ではロボットアーム等の干渉、後者では個人差や制御の難しさといった問題が生じる。そこで本研究では磁力を用いて把持物体を駆動することにより、把持物体をアームなどで接地することなく安定的な力覚を提示する手法を提案し、その実現性を評価する。
- 2E3-5
-
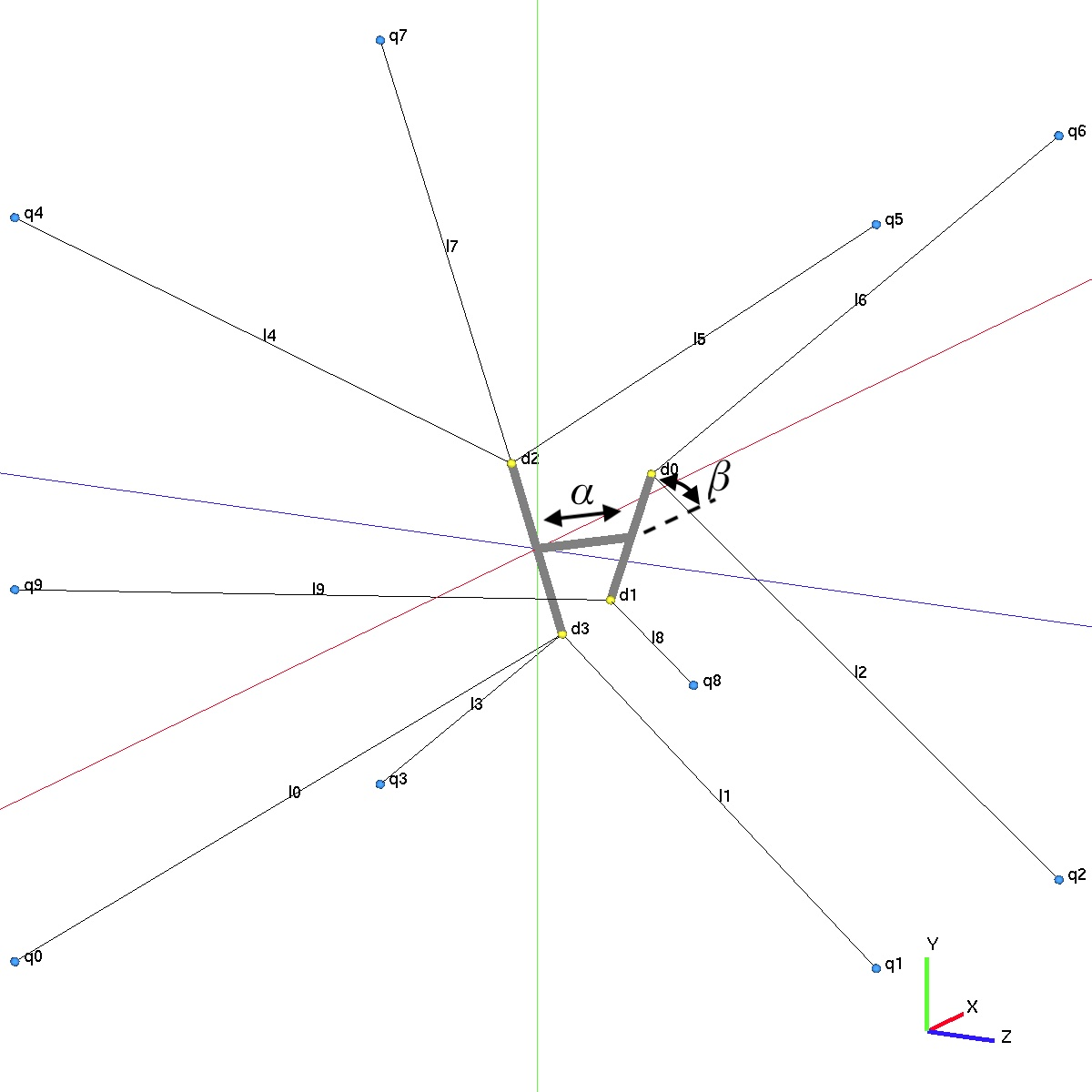
- シリンジ操作を実現する8自由度ワイヤ駆動型力覚提示装置の提案
〇赤羽 克仁(東京工業大学 科学技術創成研究院 未来産業技術研究所) - 本研究では,シリンジ操作を実現する8自由度ワイヤ駆動型力覚提示装置の提案を行う.シリンジ全体の並進と回転の6自由度の力覚提示のみならず,外筒と内筒の関係を並進と回転の2自由度として合計8自由度の穿刺操作を実現することを目的とする.提案手法を検証する為に,可動域における位置・姿勢の計測について計算機シミュレーションを行った.
- 2E3-6
-
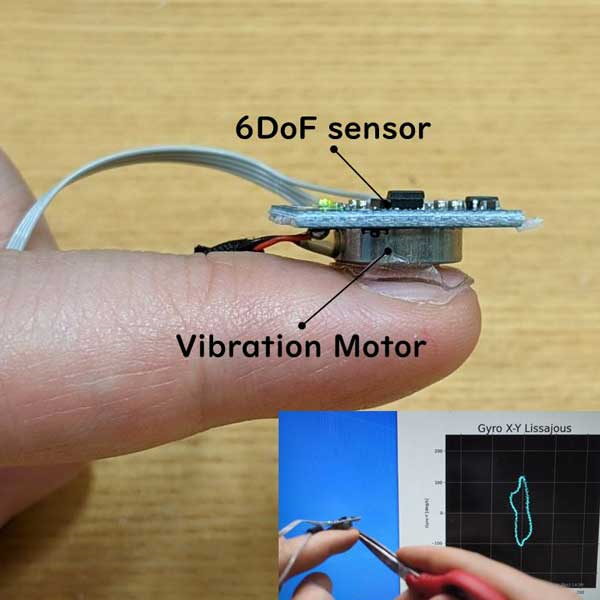
- 爪からの加振による指腹部触覚センシング
〇梶本 裕之(電気通信大学 大学院情報学専攻) - 指先を用いる技能の記録や再現のために、ユーザの指に装着して指腹の触覚を計測する技術は重要である。一方でセンサ自体が指腹部を覆うと本来の触覚が損なわれるという問題がある。この問題に対して爪色計測や爪の歪計測等が提案されているが、加えられた力の方向計測に留まっている。本研究では爪上に偏心モータと加速度・角速度センサを載せ、加振による指の振る舞いを計測することで指腹の接触位置等を推定する方法を提案する。
- 2E3-7
-
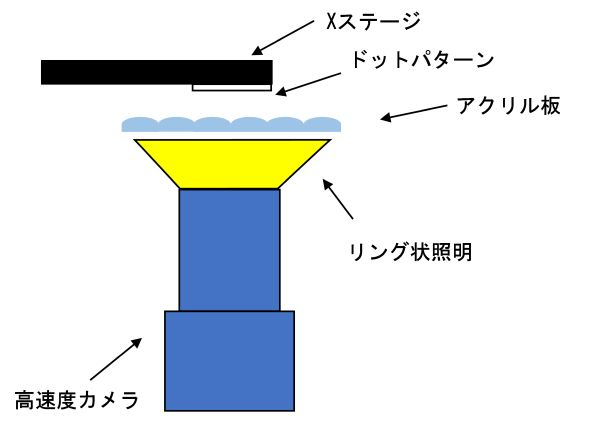
- 空気中における凹凸面に対する指先変形の計測システム
〇和田 佳久(愛知工科大学 工学部)、田川 和義(愛知工科大学 工学部、立命館大学 総合科学技術研究機構) - 指先で物体に触れた際の触感を提示するには,指紋を含む指腹部に生じるStick-Slip現象の変形・振動を求める必要がある.しかし,表面構造が非一様な物体では光学的な歪みが発生し,指先の変形計測が困難である.
本研究では,透明な凹凸面を介してドットパターンを高速度カメラで撮影し,発生する光学的な歪みの補正テーブルを作成,これに対応可能な計測環境を構築した.これにより,指紋スケールでの計測ができることが確認された.
- 2E3-8
-
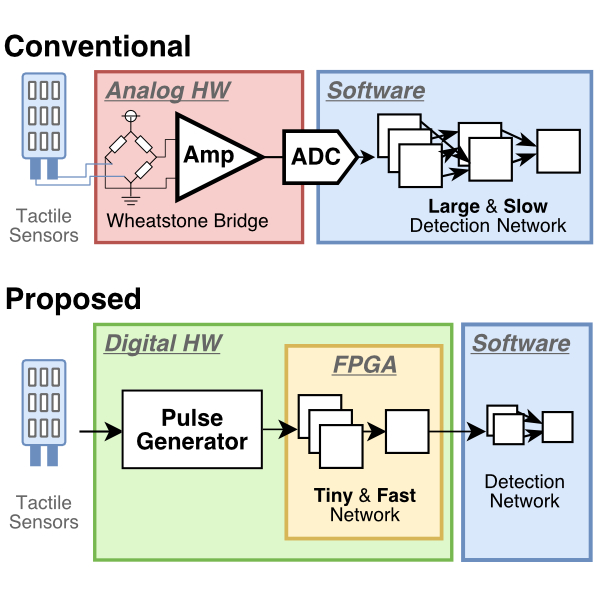
- MEMS触覚センサ向け機械学習のためのFPGAによるSNNパーセプトロン実装
〇青木 雅典(立命館大学情報理工学部)、 嬉真花(立命館大学情報理工学部)、安藤 潤人(立命館大学情報理工学部)、寒川 雅之(新潟大学工学部)、秋田 純一(金沢大学理工学域)、野間 春生(立命館大学情報理工学部) - 我々の開発しているMEMS触覚センサでは、得られたデータをリアルタイムに処理可能なシステムが求められている。ソフトウェアによる機械学習では、
回路規模や消費電力、リアルタイム性の観点から実装することが難しい。そこで、本研究ではFPGAによってリアルタイムに処理することを目的として、ハードウェア機械学習の一例としてスパイキングを用いたパーセプトロンを実装し、その可能性を検討した。