Monday, 13 September
9月13日
一般発表 9:00-10:20 触力覚(応用)
座長:橋本 悠希(筑波大学)
- 2E1-1
-
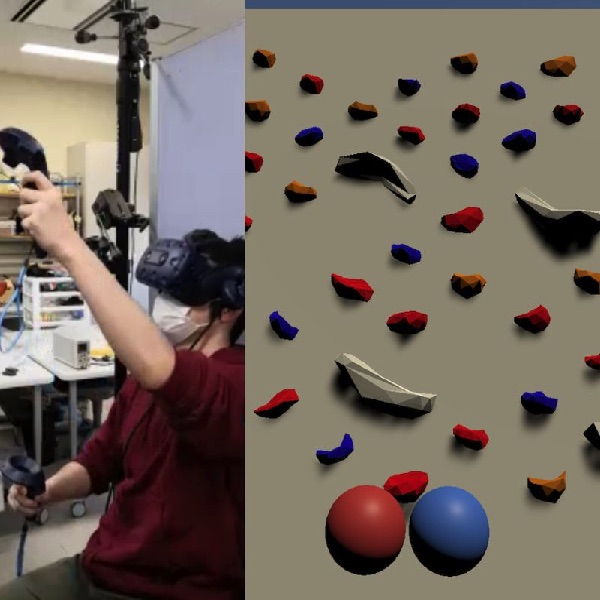
- 力覚を提示するVRボルダリングシステムの開発
〇戸田 貴仁(立命館大学 情報理工学部)、臼井 裕貴(立命館大学 情報理工学部)、満田 隆(立命館大学 情報理工学部) - 突起を掴んで登る力覚が得られるVRボルダリングシステムを開発した。実際の手の動きよりVR空間上の手の動きを遅く表示して力覚を提示する手法と、手首を空気圧カフで圧迫して力覚を提示する手法を比較した結果、重量感覚、突起を掴んだ感覚、登攀感覚のいずれも、2つの手法を同時に用いた場合が、それぞれの手法を単独で用いたときよりも高く評価された。
- 2E1-2
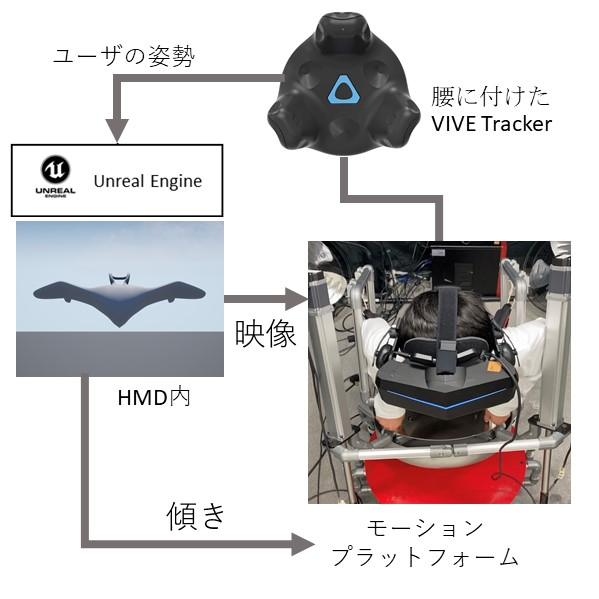
- 体幹トレーニングのためのインタラクティブ飛行システム
〇福山 陸(広島市立大学)、脇田 航(広島市立大学) - 近年,VRトレーニングシステムに関する研究開発がいくつか行われているが,モーションプラットフォームを用いてユーザの体の動きに応じてインタラクティブに操作可能なものはあまり例がない.そこで本研究では,モーションプラットフォームによるインタラクティブな体幹トレーニングを実現するため,VR空間内の環境変化および体験者の荷重移動操作によって慣性力等の外力や機体の傾きを呈示可能な飛行システムを構築した.
- 2E1-3
-
- 確率共鳴効果を用いた肌触感の感度向上に関する研究
〇今野 萌音(東京大学大学院情報理工学系研究科)、吉田 成朗(東京大学先端科学技術研究センター/国立研究開発法人科学技術振興機構さきがけ)、雨宮 智浩(東京大学大学院情報理工学系研究科)、鳴海 拓志(東京大学大学院情報理工学系研究科) - スキンケアによる肌改善効果はスキンケアを長期的に行わないと実感しにくい。よって日々のスキンケアで肌状態の変化を実感することは難しく、スキンケアを継続して行うモチベーションが保たれにくい恐れがある。本研究では肌状態の微細な変化を感じやすくするために、肌触感の感度を向上させる手法を提案する。手に振動を加えることで指先の感度を向上させられる確率共鳴効果に着目し、この効果が肌触感の感度向上に貢献するか調査した。

- 2E1-4
-
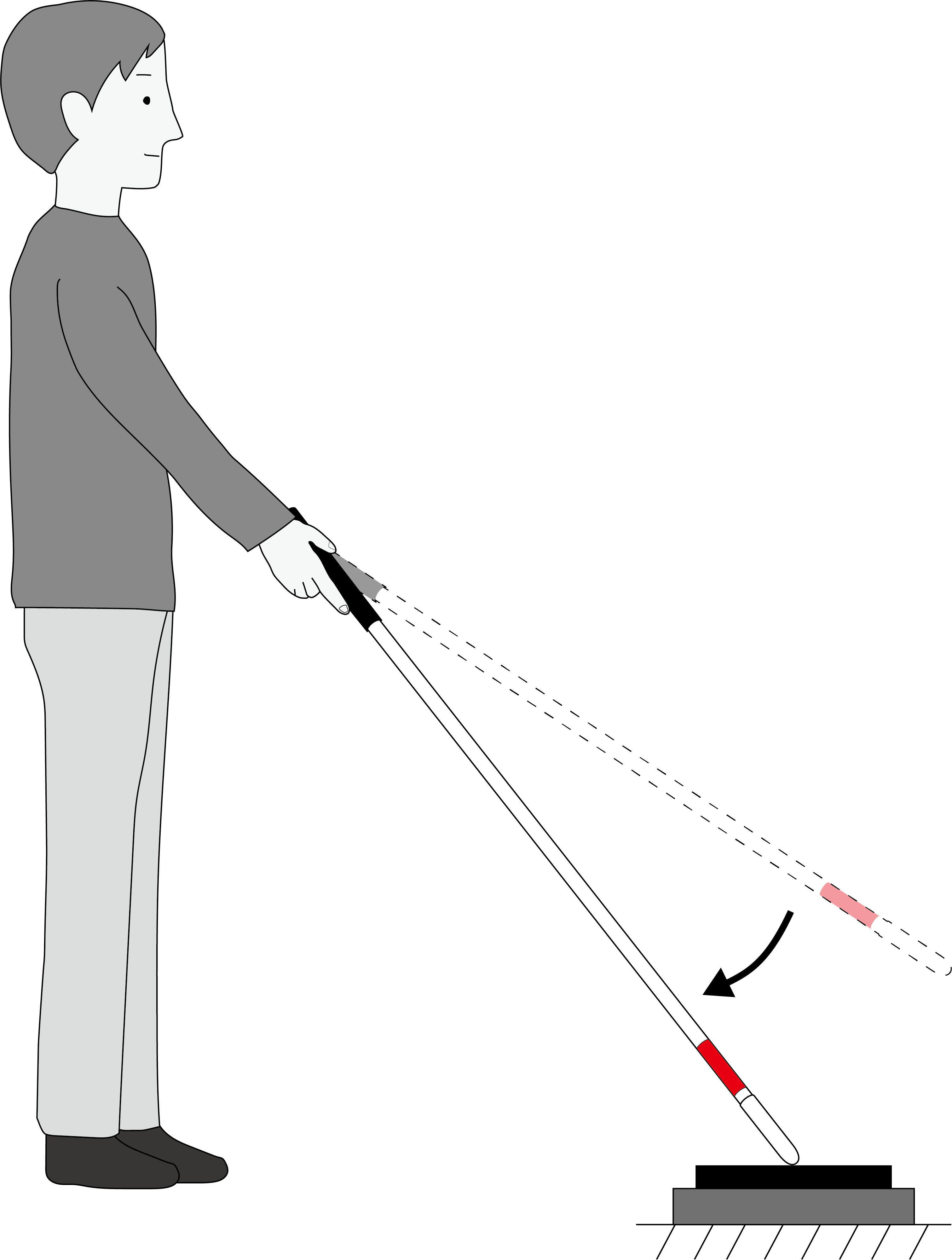
- 白杖を用いた間接的なタッピングによって発生する振動・打撃音・反力と硬さ知覚の関係
〇田辺 健(国立研究開発法人産業技術総合研究所)、布川 清彦(東京国際大学)、土井 幸輝(国立特別支援教育総合研究)、井野 秀一(国立研究開発法人産業技術総合研究所、大阪大学) - 白杖は視覚障害者が単独で移動する際に最も広く利用される補助具であり,白杖の主な役割の一つに情報の収集が挙げられる.本研究では,現状の白杖が伝える情報を明らかにするために,視覚障害者が白杖を介して判断した対象物の主観的な硬さと白杖と対象物が接触することで発生する振動・打撃音・反力との関係を多変量解析によって明らかにした.解析の結果,振動よりも打撃音と反力が硬さ知覚への寄与が大きいことが示された.
- 2E1-5
-
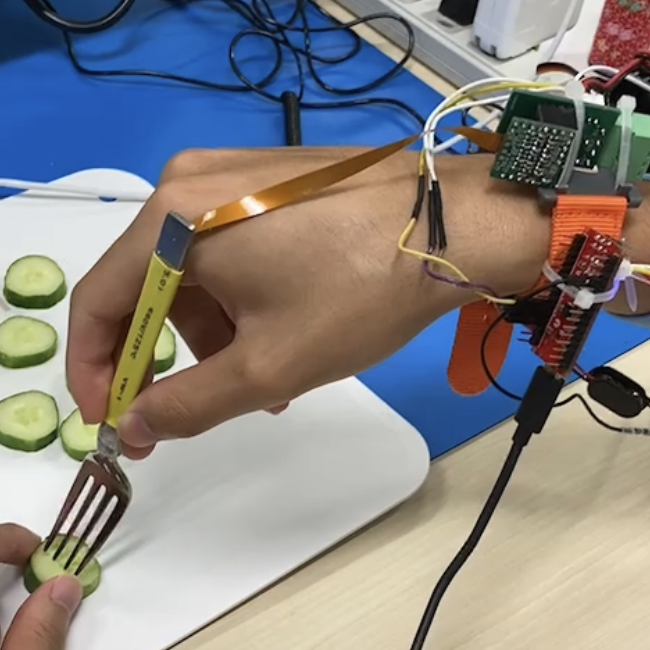
- MEMS触覚センサを用いたフォークによる食材刺突時の把持力に基づく食材判別
〇坪倉 奏太(立命館大学 情報理工学部実世界情報コース)、柴田 結衣(立命館大学 情報理工学部実世界情報コース)、安藤 潤人(立命館大学 情報理工学部実世界情報コース)、寒川 雅之(新潟大学 工学部機械システム工学科)、渡邊 淳司(NTTコミュニケーション科学基礎研究所)、野間 春生(立命館大学 情報理工学部実世界情報コース) - 我々が開発している圧力と剪断力を計測できる超小形MEMS触覚センサは道具と手の間に作用する力の計測が可能である。本研究では触覚センサをフォークの柄の裏に取り付け,食材刺突時において中指がフォークに及ぼす把持力を計測した.その計測結果をもとに刺突した食材の判別を,サポートベクターマシンやディープラーニングなど様々な機械学習方式を用いて実施し,それらのモデルの違いによる判別精度の比較検討を行なった.
- 2E1-6
-
- 複数人の触覚共有に向けた同時知覚可能人数の調査
〇北道 広大(名古屋工業大学大学院工学研究科)、柴﨑 美奈(慶應義塾大学大学院メディアデザイン研究科)、湯川 光(名古屋工業大学大学院工学研究科)、南澤 孝太(慶應義塾大学大学院メディアデザイン研究科)、田中 由浩(名古屋工業大学大学院工学研究科) - 触覚伝送技術の発展により、人―人間で触覚共有が可能になりつつある。複数人の触覚を一度に感じられれば、遠隔地を始め広い範囲の対象知覚や同時の比較が可能になり、複数人による感覚の時空間的拡張が期待できる。本研究では、指先の触覚情報を取得して他者の上腕に提示を行い、複数人の振動触覚を共有するシステムを構築した。基礎検討として、運動を伴わない触知覚を対象に、共有人数と知覚性能との関係を検討する。
