Sept. 11 2019
Room A Haptics - Tactile & Force Displays
Chair:Masamichi Sakaguchi(NITech)
- 3A-01
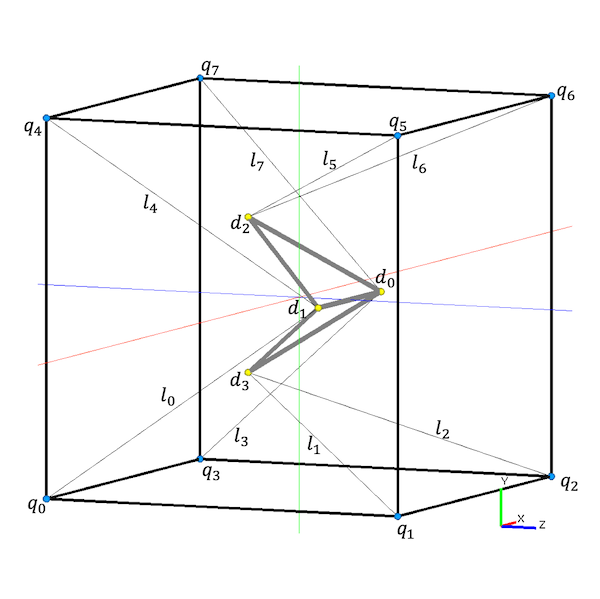
- Proposal of a 7DOF Wire Driven Haptic Device for Natural Grasp Operation
〇KATSUHITO AKAHANE(Tokyo Institute of Technology)、TAKAMICHI NAKAMOTO(Tokyo Institute of Technology) - 本研究では,自然な把持操作を実現する7自由度ワイヤ駆動型力覚提示装置の提案を行う.合計8本のワイヤにより,エンドエフェクタの並進・回転の6自由度の力覚提示のみならず,把持操作を追加の1自由度として合計7自由度の力覚提示を実現することを目的とする.提案手法を検証する為に,可動域における位置・姿勢の計測について計算機シミュレーションを行った.
- 3A-02
- Development of haptic device using fishing rod
〇Daiki NAITO(The University of Electro-Communications、The University of Electro-Communications)、Hiroyuki KAJIMOTO(The University of Electro-Communications、The University of Electro-Communications) - 力覚提示はバーチャルな物体の存在感を提示させる重要な要素である.そこで,我々は釣竿を用いて指先に力覚を提示するデバイスを開発する.釣竿から出ている糸を指に取り付け,糸の巻取りを制御することで指に力覚を提示する.また,釣竿を取りつける固定台を多方向に傾けることが可能な構造にすることで,指先に提示する力の向きを変化させる.本研究では,指に取り付けた1本の糸で多方向の力を提示することを目指す.

- 3A-03
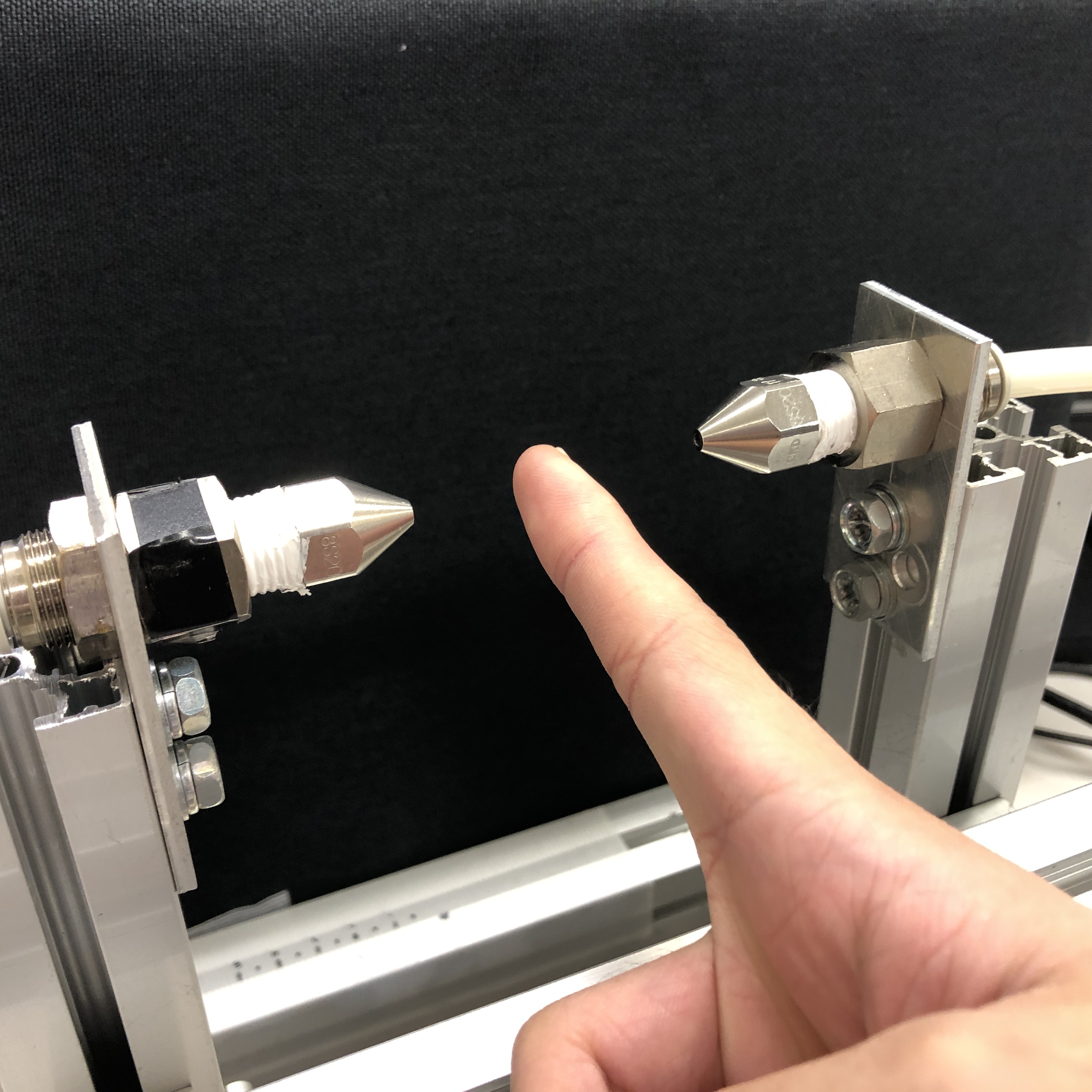
- DEVELOPMENT OF NONCONTACT - TYPE HAPTIC DEVICE USING COUNTERJETS
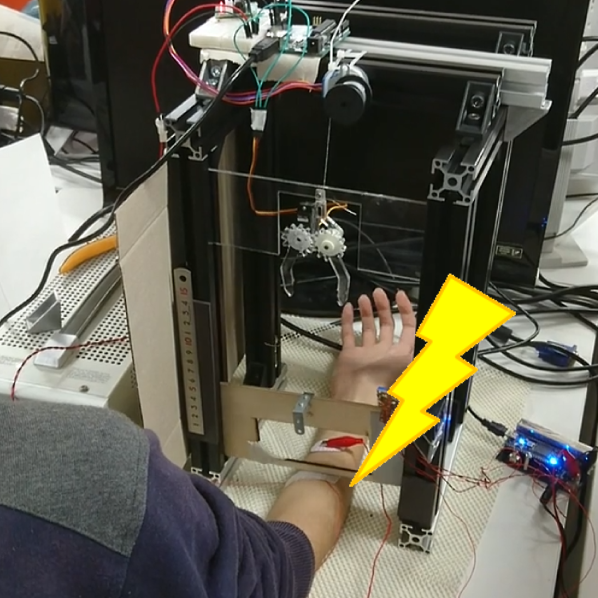
〇Keita Uchiyama(University of Tsukuba)、HIROAKI YANO(University of Tsukuba)、HIROO IWATA(University of Tsukuba) - 従来の噴流を用いた指先への力覚提示では反力を提示する方向のみから噴流を当てるため、指先が移動しやすくバーチャル物体の形状提示は難しい。本研究では指先に対向する爪側からも噴流を当てることによって、指位置を安定させたまま力覚提示を可能とする方式を提案する。本稿では1自由度のプロトタイプシステムを開発し対向噴流に対するユーザーの知覚実験を通して提案手法の有用性を検証した。
- 3A-04
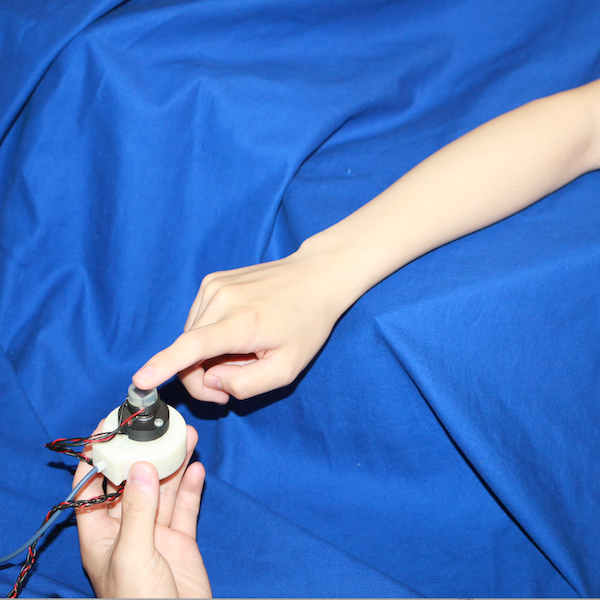
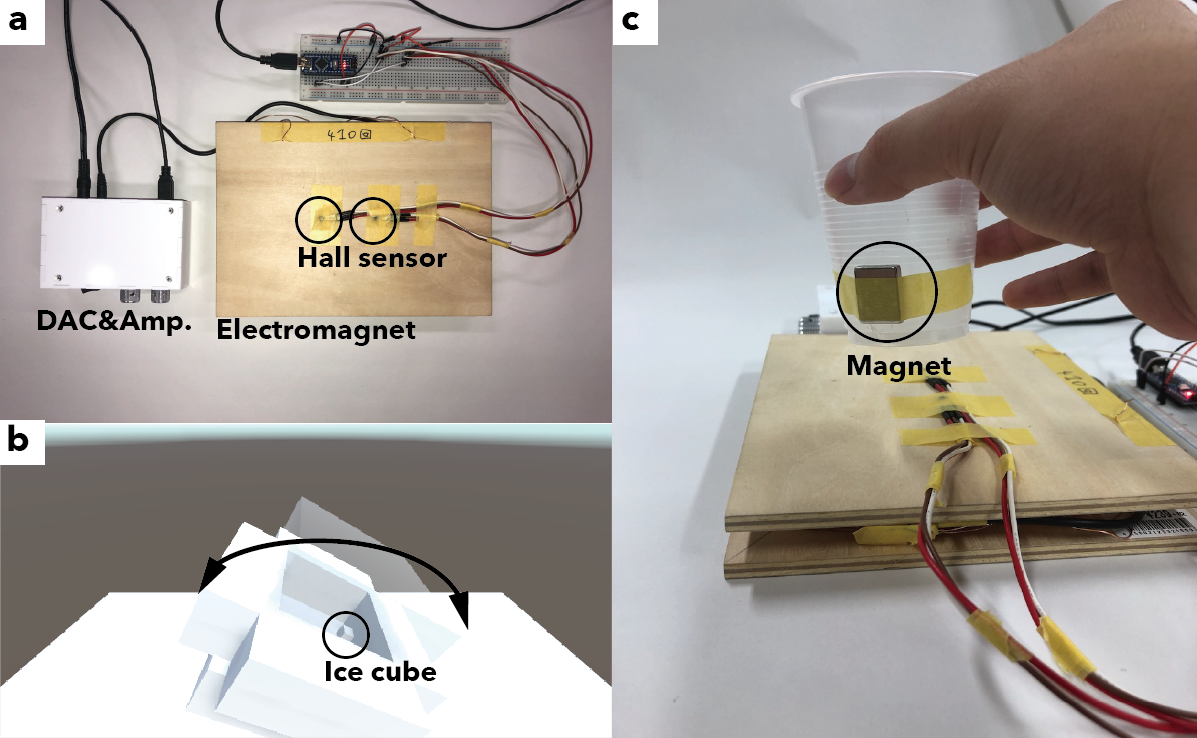
- Preliminary Study of Vibrotactile Presentation System by Attaching Magnet
〇Makoto Uju(Keio University, Graduate School of Media Design)、ROSHAN PEIRIS(Keio University, Graduate School of Media Design)、KOUTA MINAMIZAWA(Keio University, Graduate School of Media Design) - 映像や音声を主とするコンテンツに触覚情報を付加することによる視聴体験の向上が試みられている.しかし,身体への複数の振動子の装着は負荷が大きい.本研究では身体や物体に直接永久磁石を貼り付け,環境に埋め込まれた電磁石を駆動し振動を提示することを提案する.本研究では,まず物体への永久磁石貼り付けによる触覚提示プロトタイプの作成を行い,物体を経由した振動触覚の提示が可能であることを示した.
- 3A-05
- Basic Study on a Wearable, Modular and Multiple Haptic Feedback System
〇TOMOSUKE MAEDA(Totota Central R&D Labs., Inc)、Tetsuo Kurahashi(Totota Central R&D Labs., Inc) - 触覚は全身に存在する特殊である.しかし,多くの触覚デバイスは装着する部位に制限や複数の触覚を広範囲に提示することが困難である.これらの問題を解決するために,本研究ではさまざまな部位に対して,振動覚,圧覚,温冷覚・風覚を提示可能なシステム,Haptipleを提案する.本稿では,Haptipleの試作とアプリケーションおよび現状の制約について述べ,そこから本システムのコンセプトの実現可能性を示す.

- Enhancement of Subjective Mechanical Tactile Intensity via Electrical Stimulation(II): Evaluation of Sensation Quality
〇RYO MIZUHARA(The University of Electro-Communications)、AKIFUMI TAKAHASHI(The University of Electro-Communications)、Hiroyuki KAJIMOTO(The University of Electro-Communications) - 機械刺激による触覚提示は,実物体が肌に接触するため自然な触覚提示ができるが,一定以上の強度の刺激は肌に痕が残る可能性がある.対して電気刺激による触覚提示は感覚神経の直接刺激により,皮膚を傷つけずに強い感覚提示が可能だが,その自然さは減じる.そこで,電気刺激と機械刺激を組み合わせ,強度と自然さを両立した触覚提示手法を提案する.本稿では刺激の増強と電気刺激特有のビリビリ感の防止の両立が可能か検証した.
- 3A-07
- Hole Number Effect on Perceptual Sensitivity: Cutaneous Stimulation Using Static Suction Pressure
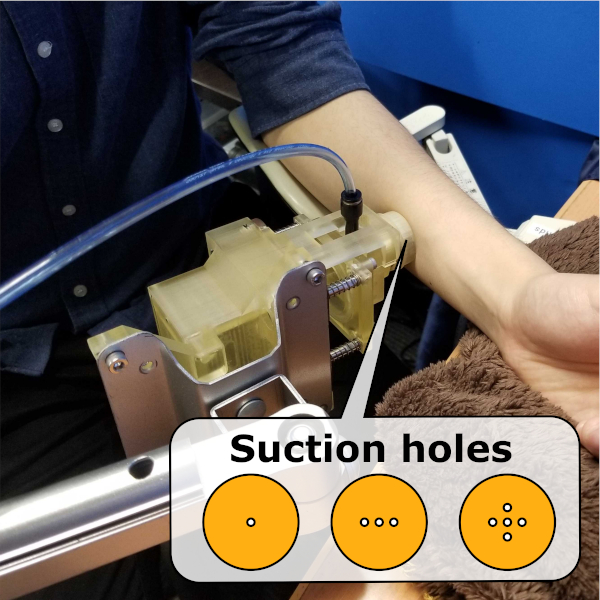
〇Kaoru Saito(Tohoku University)、Masashi Konyo(Tohoku University)、Saito Sekiguchi(Shiseido Global Innovation Center)、naomi Arakawa(Shiseido Global Innovation Center) - 吸引による皮膚刺激は皮膚の知覚感度測定や触覚デバイスへの適用が期待される。我々は吸引圧刺激の強度増強法として複数の吸引孔を配置する手法を提案する.具体的には吸引孔の穴の数や中心間距離,配置パターンなど様々な要素を検討し,より知覚感度を増強できる手段を探すとともに触覚受容器の活動について検討を行う.まずは吸引孔の穴の数が知覚閾値に及ぼす影響について調査したので報告する.
- 3A-08
- Non-Contact Tactile Presentation by Very Low Frequency Sound
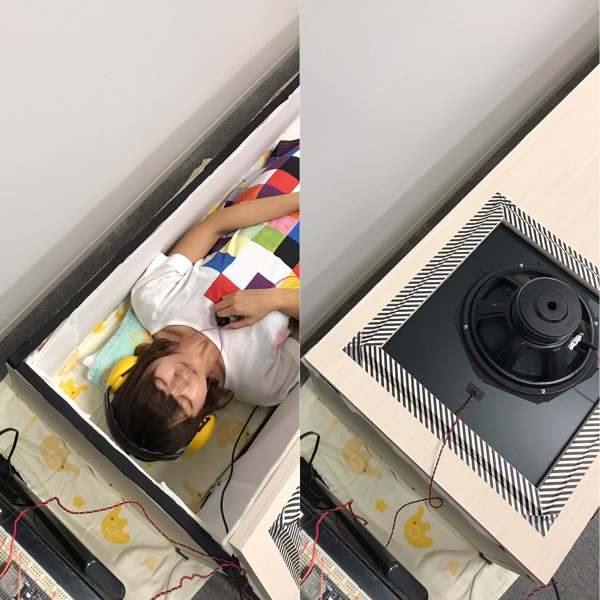
〇Mikiko KARASAWA(The University of Electro-Communications)、Hiroyuki KAJIMOTO(The University of Electro-Communications) - 触覚提示技術の多くは,機能が実装されたシステムを自ら触りにいく/身につける,といった能動的な行動が必要である.本発表では,ユーザの能動的な行動なしに,かつ,簡便な構成により,さりげない触覚提示を実現するシステムを提案する.オーディオスピーカを用いて非可聴域の超低周波の音圧変化を生じさせることにより,ユーザがその空間にいるだけで全身に触覚を得ることが出来る.
- 3A-09
- Relationship between Vibrotactile Detection Threshold and Intensity of the Stimulation for Appropriate Perception
〇Mizuki Sakuma(Nagoya Institute of Technology)、Yuki Kito(Nagoya Institute of Technology)、YOSHIHIRO TANAKA(Nagoya Institute of Technology)、Noritaka Kawashima(Research Institute of National Rehabilitation Center for Persons with Disabilities)、Masahiro Yoshikawa(Osaka Institute of Technology) - 触覚の感度は部位によって異なり,個人差もある.近年開発の進む触覚ディスプレイの分野において,感度と適度な感覚を与えるための刺激強度の関係を知ることは,個人差の緩和や他の部位への適用など,デバイス設計に役立つ.我々が研究開発している触覚付き装飾義手においても,身体認識向上や安全性,快適性において重要な設計因子である.そこで本研究では複数部位において振動検出閾値および適度な感覚を生む刺激量を調査した.